1. Introduction
Traditional stage-type protection has the advantages of simple wiring and high reliability, and is widely used in power grids of different voltage levels [
1]. However, when the distribution network operation mode changes significantly, the stage-type protection may lose selectivity, or the sensitivity may drop dramatically, which brings challenges to the operation of the distribution network [
2,
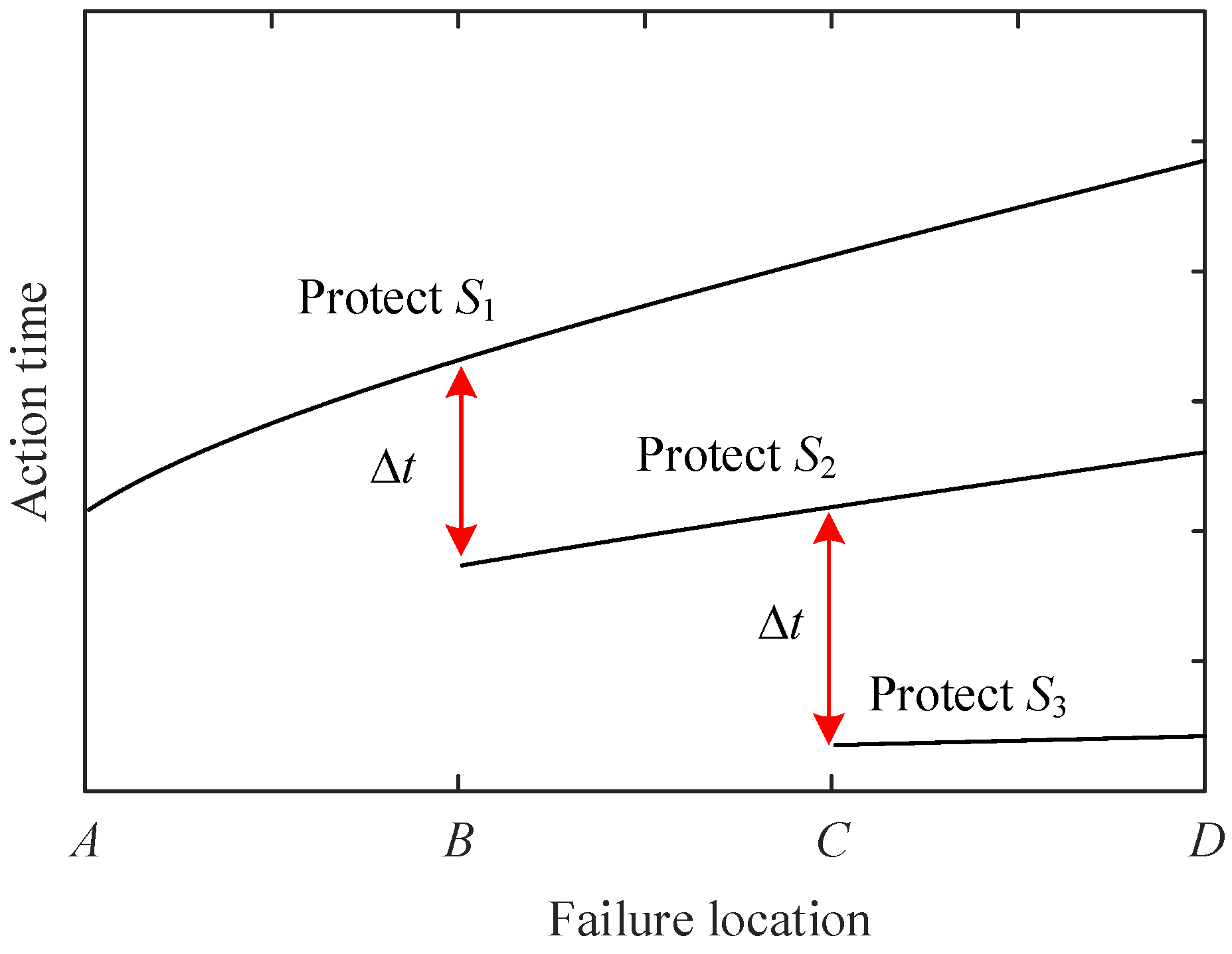
3]. In addition, according to the rectification principle of stage-type current protection, the action rectification time of the backup protection on the power side increases with the number of grid levels [
4,
5]. It may not exclude serious faults near the power supply side when the main protection is abnormal [
6]. In this context, inverse-time over-current (ITOC) protection as an improved scheme of stage-type current protection has received much attention from domestic and foreign experts. Compared with stage-type current protection, the action time of ITOC protection is inversely proportional to the magnitude of short-circuit current, so ITOC protection can quickly remove the fault near the power side. In addition, the change of power system operation mode only changes the action time of ITOC protection, which does not affect its selectivity and sensitivity. In summary, ITOC protection has excellent action performance.
In reference [
7], a comprehensive protection scheme based on measured impedance is proposed, including an impedance differential method and an inverse-time low-impedance method, which can clear faults with high sensitivity. Hong et al. [
1] proposed an improved ITOC protection method based on the compound fault acceleration coefficient and the beetle antennae search (BAS) optimization method for a microgrid. In [
8], an inverse time overcurrent protection setting strategy for a distribution network (DN) based on the improved gray wolf optimizer (GWO) algorithm is proposed. Reference [
9] designed a new adaptive protection algorithm for inverse-time over-current relays (OCRs), which can ensure both selectivity and quickness of the relay.
With the rapid development of renewable energy technologies, distributed generation (DG) will be widely used in the power grid [
10]. However, with the application of many distributed renewable energy sources, the distribution network has changed from the traditional single-ended power supply to a multi-power pool, and the power supply structure has changed significantly [
11,
12]. Many researchers have proposed a variety of methods to solve the impact of connecting DG to distribution networks on traditional protection [
13]. One part of the research focuses on the protection method depending on the change in electrical information. In [
14], an adaptive over-current protection method that diagnosed the microgrid operating mode from the voltage analysis is proposed. Reference [
15] proposed a new time-current-voltage tripping characteristic for directional overcurrent relays that can achieve a higher possible reduction of overall relays operating time in meshed distribution networks. In the literature [
16], a differential protection method using a non-nominal frequency current during the fault is proposed, which is more sensitive than traditional protection. Amplification of fault characteristics by superposition of positive and negative sequence current after fault is proposed in Reference [
17]. With the development of intelligent algorithms, some emphasis on intelligent algorithm protection has been proposed. The authors of [
18] proposed an efficient intelligent communication-based protection algorithm that implements different multi-functional protection principles supported by blocking schemes. In [
19], the optimization problem of coordination between overcurrent and distance relay is solved by improving the objective function of the genetic algorithm. The authors of [
20] proposed an efficient adaptive overcurrent protection and coordination for large-scale wind farms using rule-based fuzzy logic controller (FLC) scheme.
When the DG is connected to the distribution network, the above protection scheme does not have the advantage that when the fault current is higher, the action time is shorter.
In the literature [
21], an impedance-accelerated inverse-time over-current (IA- ITOC) protection scheme was proposed. The inverse time characteristic curve is modified by introducing the measured impedance percentage and impedance correction index to improve the protection action speed. However, the method of impedance coefficient adjustment in the literature [
21] is too complicated, and there is a risk of protection mismatch [
22].
Based on the current situation of the study, the limitations of traditional ITOC protection applied to multi-source distribution networks are analyzed in this paper. In addition, the rules of the IA-ITOC protection scheme are further analyzed to explore the mechanism of the protection mismatch. On this basis, an improved impedance-accelerated inverse-time over-current (IIA-ITOC) protection is proposed. The new protection is based on the improved genetic algorithm (GA) to optimize the protection parameters. Firstly, by increasing the number of optimization stages of backup protection to improve the action speed of the remote backup protection, and then an improved GA is introduced to improve the action time of the overall protection. The improved GA takes the minimum total action time of protection as the objective function, selectivity and sensitivity as the constraint conditions, and establishes the inverse time protection parameter optimization mathematical model to solve the problem. The simulation verifies the superiority of the proposed scheme.
4. A New Inverse-Time Over-Current Protection Optimization Scheme Based on Improved Genetic Algorithm
4.1. New Impedance-Accelerated Inverse-Time Over-Current Protection Scheme
Due to the poor speed of the remote backup protection in IA-ITOC protection scheme, this paper introduces the optimized level of backup protection into the action equation of the security, as shown in (9):
where,
,
k denotes that the current protection is in the backup level,
k = 1 indicates the main protection of this level,
k = 2 indicates the near backup, and so on.
rik indicates the impedance correction index of the current security. Increasing the number of backup protection optimization levels can effectively improve the action speed of the upper-line protection as remote backup protection.
Due to the introduction of backup protection optimization stages, the parameter adjustment becomes more and more complicated, so a new impedance modified inverse time overcurrent protection optimization scheme based on an improved genetic algorithm is proposed: the backup optimization stages are introduced based on the traditional inverse time overcurrent protection, and the adjustment parameters rik, Iopi and Tp.i are optimized by the improved genetic algorithm to improve The selectivity and rapidity of the security are improved.
4.2. Optimization Model Analysis
This optimization model contains optimization objectives and constraints to improve the speed and selectivity of protection.
4.2.1. Optimization Target
From the aspect of enhancing the quick action of protection, the sum of all lines’ main protection and backup protection action time is minimized as the optimization objective. The total optimization objective is established as follows:
where
Tall, M,
N,
L,
tpij,
tbik are: the sum of all line main protection and backup protection action time, the number of faulty lines, the number of principal protection, and the number of the backup guards.
j and
k represent the operation time of the main protection and backup protection when line
i is faulty.
4.2.2. Restrictions
The above optimization objectives ensure the speed of ITOC protection and set constraints to ensure the protection selectivity; the primary rules are as follows:
The CTI is the sum of the calculation time of the protection device and the action time of the circuit breaker.
- 2.
Industry-standard constraints;
The value ranges of some parameters in the action equation of ITOC protection are as follows:
Among them, Tp min, Ip min, ri min, Tp max, Ip max, and ri max are the lower limits of the values of time adjustment coefficient, starting current, and impedance correction coefficient, and the upper limits of the importance of time adjustment coefficient, starting current, and impedance correction coefficient, respectively. Compared with backup protection, which focuses more on the selectivity of protection, main protection prioritizes the speed of protection.
- 3.
Starting current
It should be noted that: when under the maximum load current, the protection should not be false, and when under the minimum fault current, the defense should act quickly, so the protection starts current other constraints are as follows:
where,
ILi max,
Iki min,
k1, and
k2 are the maximum load current of line
i, the minimum fault current of line
i, the corresponding reliability factor, and the sensitivity factor, respectively.
4.3. Improved Quantum Genetic Algorithm
For the above optimization models, intelligent optimization algorithms represented by genetic algorithms are generally used to solve them. However, traditional intelligent algorithms have many problems, such as small sample space, limited search capability, and quickly falling into local optimal solutions, which have substantial limitations in practical use. The improved genetic algorithm is selected as the optimal search algorithm in this paper to solve the above problems [
24,
25]. The improved genetic algorithm is based on the original genetic algorithm to improve the four aspects of the coding method, population initialization, quantum revolving gate, and quantum variation [
26].
4.3.1. Probabilistic Amplitude Based Coding Method
Since the conventional quantum genetic algorithm with chance measurement operations requires constant and frequent encoding and decoding; encoding with probability amplitude reduces the required gene bits per chromosome. Thus, it can improve the algorithm’s convergence in the following form:
4.3.2. Population Initialization for Small Habitat Evolutionary Strategies
Given the inefficiency and limited search capability of the traditional intelligent algorithm, the small habitat evolution strategy is introduced to make the distribution of the initial population in the solution space more reasonable, where the
jth group of chromosomes is:
where,
n is the number of populations,
. This initialization method effectively prevents the population from clustering in a particular region, and simultaneous search in multiple directions ensures population diversity and improves the algorithm’s convergence speed.
4.3.3. Quantum Gate Tuning based on Variational Rotating Gates and Adaptive Rotation Angles
In the quantum genetic algorithm, the population is updated with individuals mainly using quantum rotating gates, and the matrix is represented as:
where
is a conventional quantum rotational gate;
is the rotation angle of the
i quantum pair.
The traditional method using a fixed rotation angle without changing the chromosome gene values has a fast convergence rate. Still, it tends to make the population fall into a local optimum. Therefore, the variational rotation gate A and adaptive rotation angle B are introduced here, as Equation:
where,
C,
a,
b,
,
fmin,
m,
,
are the control parameter (with a value of 2), the maximum (with a weight of 0.05) and minimum (with a value of 0.005) values of the rotation angle of the quantum revolving gate, the average value of the fitness of all individuals in the population, the minimum value of the fitness of all individuals in the population (the importance of the best fitness of the population), the random number, the direction of rotation of the rotation angle, and the constant (with a value of 0.01).
Due to the introduction of , the upper and lower bounds of the probability amplitude change and converge to or , preventing falling into local optimal solutions and maintaining population diversity.
4.3.4. Quantum Variation Based on Hadamard Matrix
Since the operation rotation angle
of the conventional variation is too large, it is straightforward to produce the loss of information of the optimal individuals. Therefore, when the population is close to the optimal value, the Hadamard matrix is introduced, and the variation operation is performed on the gene positions. The operation rotation angle is shortened to a small size
. The expression is as follows:
4.4. Specific Implementation Steps
Considering the above optimization model and algorithm, an impedance-accelerated inverse-time over-current protection optimization adjustment method based on an improved genetic algorithm is proposed, and the appropriate steps are shown below:
Step 1: Initialize the parameters rik, Iopi, and Tp to be optimized using a small habitat evolution strategy while ensuring the relevant constraints;
Step 2: Set different fault locations and different fault types, and calculate the magnitude of the measured current of each protection under different fault scenarios. The resulting current is input into the action equation of IIA-ITOC protection. Then calculate the total action time Tall of corresponding protection under various scenarios;
Step 3: Implement evolutionary updates using quantum gate adjustments based on variational rotational gates, adaptive rotation angles, and variational adjustments based on Hadamard matrices to obtain new optimization parameters. Meanwhile, repeat step 2 to obtain the new total action time;
Step 4: Comparing Tall with , if , the optimized parameter of the new generation is selected as the current optimal adjustment parameter; if , the original, optimized parameter is retained as the present optimal adjustment parameter;
Step 5: Determine whether the termination condition is triggered; if not, go back to step 3 until the termination condition is activated; if the termination condition is activated, the current optimal rectification parameter is output.
5. Simulation Verification
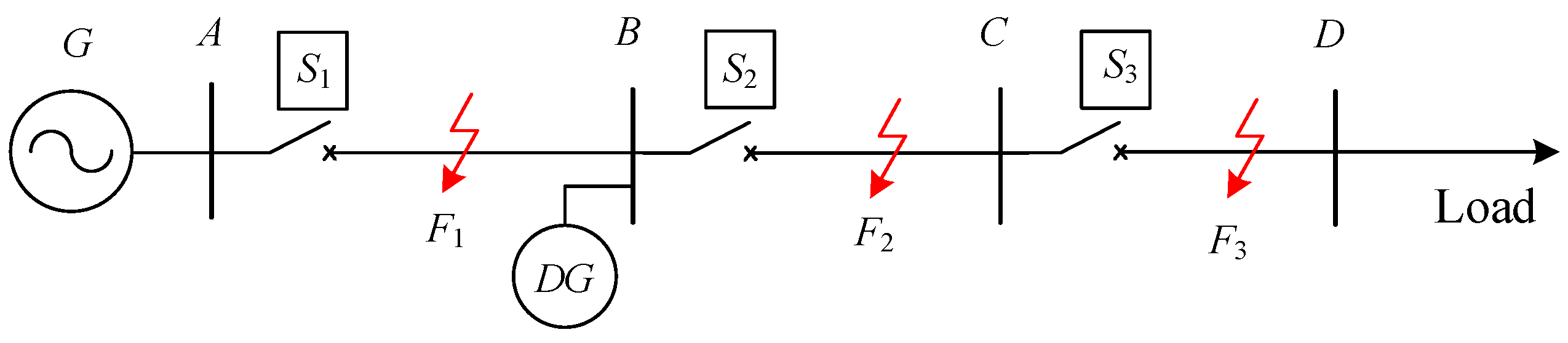
To verify the reliability and superiority of the proposed optimization method, the simulation model shown in
Figure 3 is built in the PSCAD 4.5 software, where the capacity of the load is 0.8 +
j0.5 MVA, and the cable length is 10 km. The values of the electromotive force of the system
EG and the electromotive force of the distributed power supply
EDG are both 10.5 kV. The impedance of the cable per unit length Z
l, the internal impedance of the power supply Zs, and the internal impedance of the distributed power supply Zg are, respectively, 0.22 +
j0.239
, 0.64 +
j0.5
, and 6.2 +
j3.7
.
According to the above ITOC protection calibration scheme, the traditional inverse time protection of the system connected to DG was calibrated, respectively, and the protection calibration parameters were obtained as shown in
Table 1.
Based on the currently constructed electrical simulation model and the derived mathematical model, the improved genetic algorithm is applied to optimize the simulation of the rectification parameters. The specific steps are described in
Section 4.3.
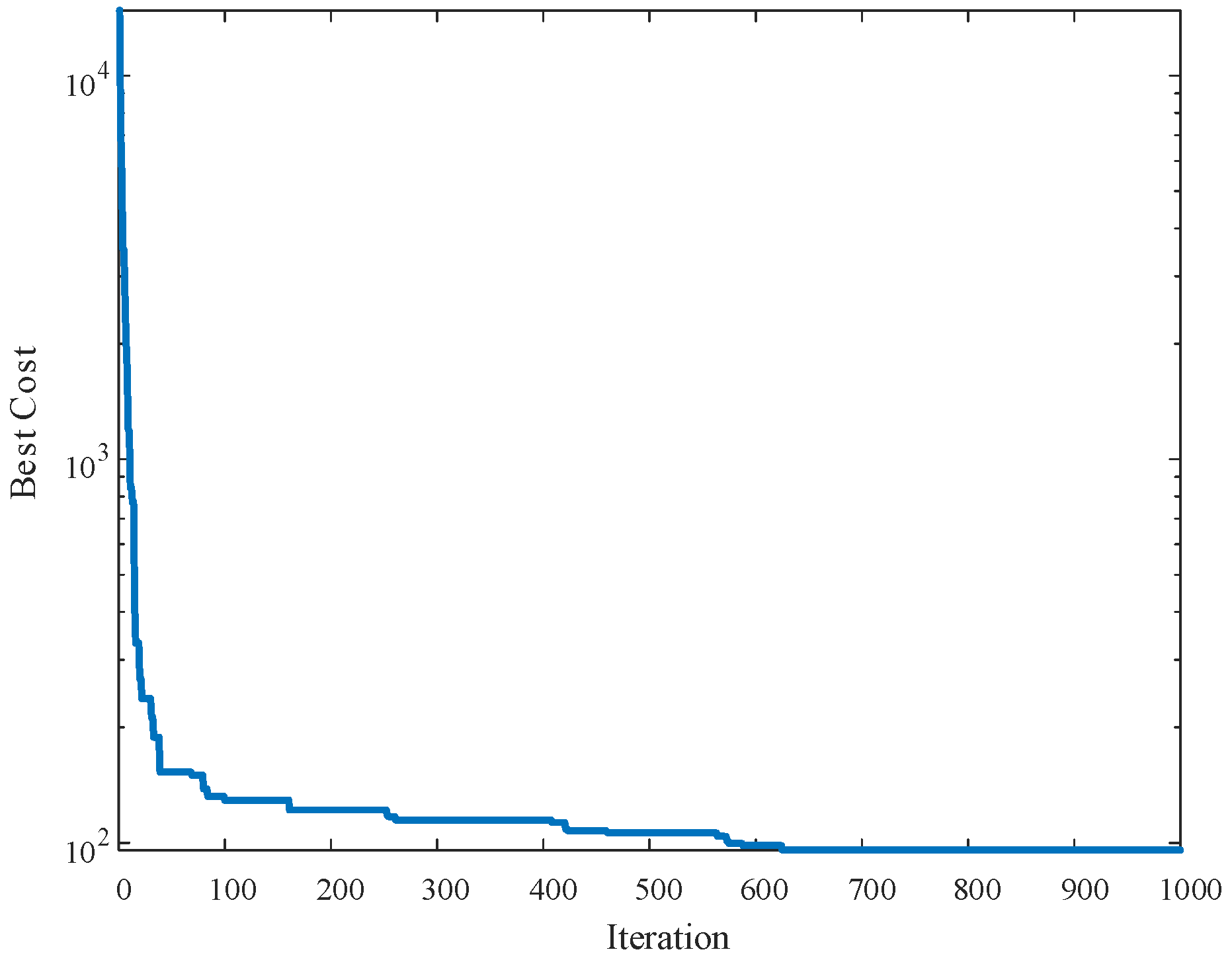
5.1. Optimization Results Display
In the improved genetic algorithm, the number of iterations and population size were set to 400 and 100, respectively. The related optimization curves and results are shown in
Figure 10 and
Table 2, respectively.
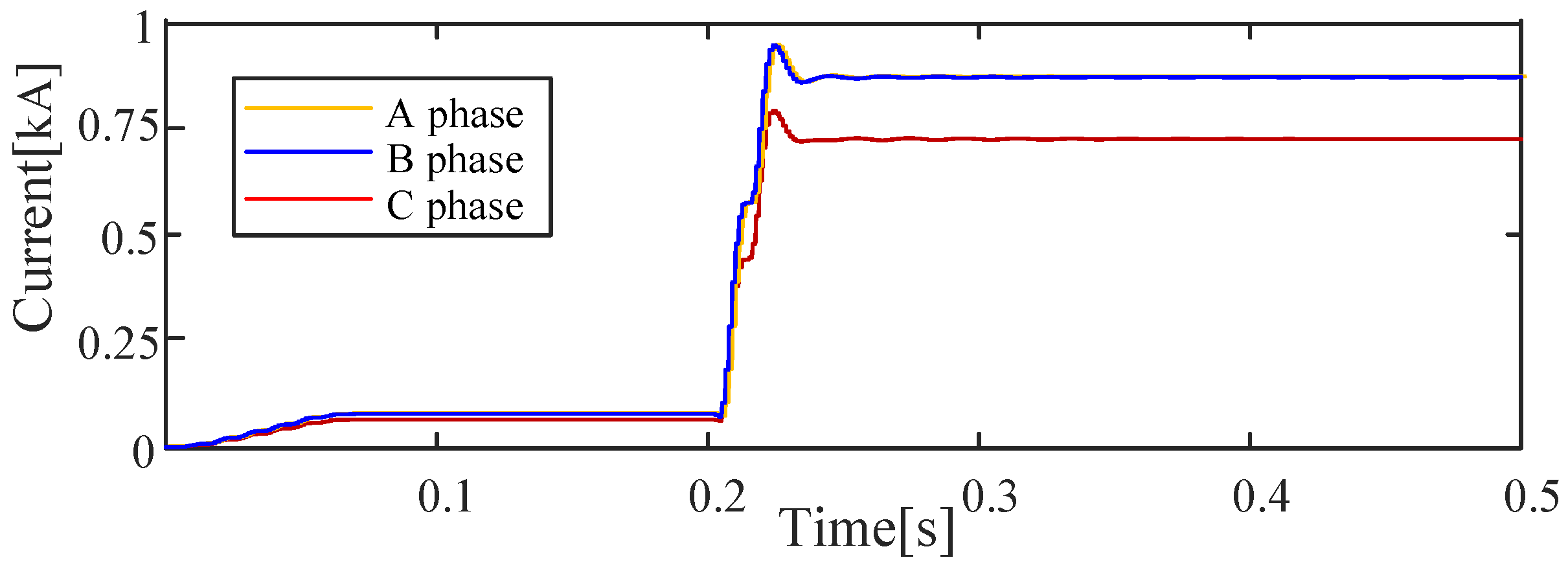
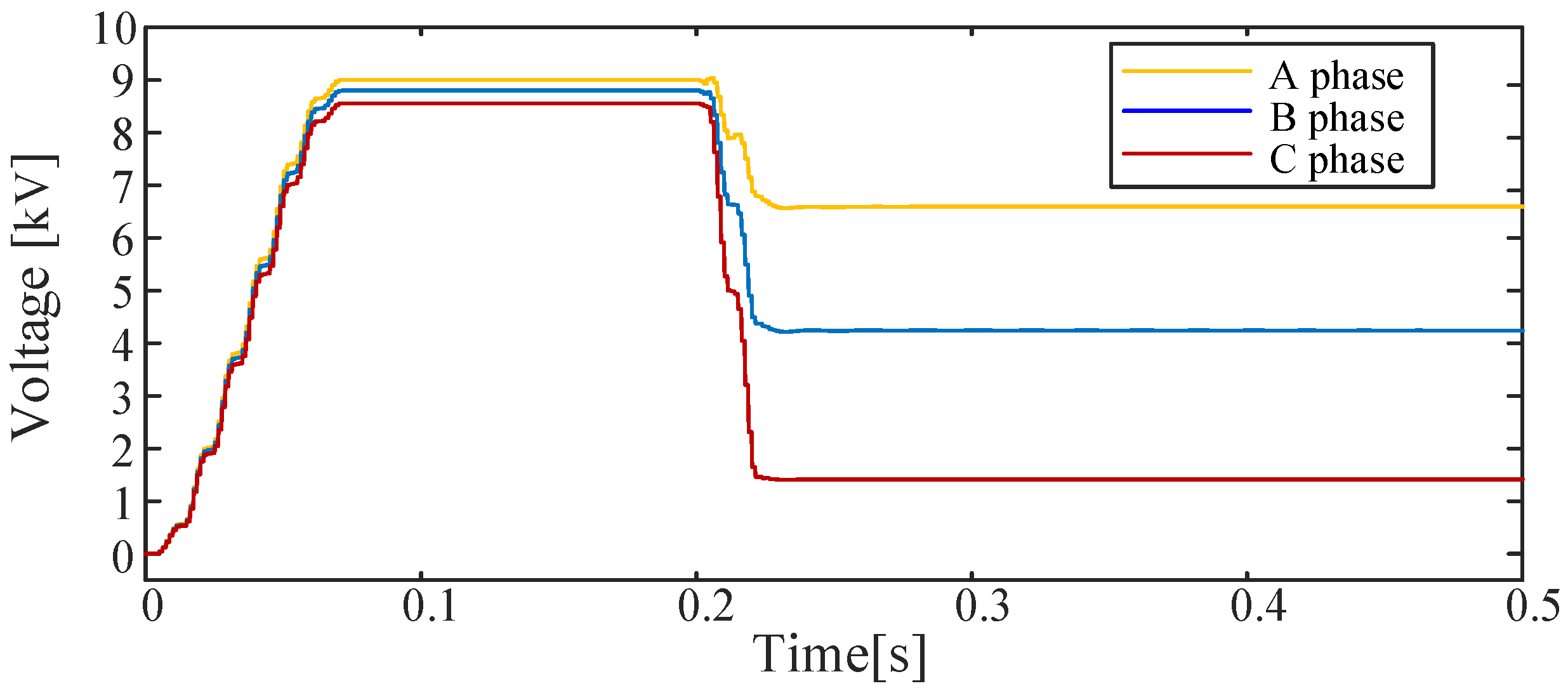
5.2. Simulation Results
Taking the two-phase short circuit fault of line CD as an example, the amplitudes of voltage and current are shown in
Figure 11 and
Figure 12 respectively, and the fault detection signal is shown in
Figure 13.
From
Figure 11,
Figure 12 and
Figure 13, the simulation results can correctly reflect the current, voltage, and detection signals. The simulation model is correct.
5.3. Superiority Analysis
The optimized setting parameters are introduced into the action equation of IIA-ITOC protection and simulated by PSCAD. Then, based on the simulation results, the time of each protection action under different fault locations and fault types is calculated. The calculation results of the proposed protection scheme are compared with those of traditional inverse-time over-current protection and impedance-modified inverse-time over-current protection to verify the advantages of the proposed protection scheme.
Three-phase short circuit fault, two-phase short circuit fault and single-phase ground short circuit fault occur in line
AB,
BC, and
CD, respectively. Various fault types are grounded through different grounding resistors. The action time of traditional ITOC protection, IA-ITOC protection, and IIA-ITOC protection for the above faults are calculated respectively. The results of action time are shown in
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8,
Table 9,
Table 10 and
Table 11.
5.3.1. Line CD Fault
Main protection, near backup protection, and remote backup protection of line
CD are
S3,
S2 and
S1, respectively. As can be seen from
Table 3, when a three-phase ground fault occurs at the line
CD, for the remote backup protection
S1, the traditional scheme of action time is 0.538 s, and impedance correction scheme of action time is 0.511 s. The action time of the improved scheme proposed in this paper is 0.463 s; compared to the above scheme, its action time is shortened by 75 ms and 48 ms, respectively.
5.3.2. Line BC Fault
The main protection and near backup protection of line
BC are
S1 and
S2, respectively. It can be seen from
Table 7 that when line
BC has a two-phase grounding short circuit fault with a grounding resistance of 50 Ω, for the main protection
S2, the action time of the traditional scheme is 1.54 s, the action time of the impedance correction protection scheme is 1.36 s, and the action time of the improved scheme is approximately 0 s. Compared with the traditional protection scheme and the impedance correction protection scheme, the action time of the improved scheme is shortened by 0.18 s and 1.36 s, respectively.
5.3.3. Line AB Fault
It can be seen from
Table 11 that when line
AB has a single-phase grounding fault with a grounding resistance of 100 Ω, for the main protection S1, the action time of the traditional scheme is 7.144 s, and the action time of the impedance correction protection scheme is 0.882 s. The action time of the improved scheme proposed in this paper is approximately 0 s, which is significantly improved compared with the above scheme.
5.3.4. Superiority Analysist
- (1)
Ground Resistance Effect
From
Table 4 and
Table 5, it can be seen that when a fault occurs via ground resistance, the near backup protection
S2 of line
CD have the same action time as the improved scheme and the impedance correction protection scheme. According to
Table 7 and
Table 8, the action time of the near backup protection
S1 of line
BC is less than the impedance correction protection scheme. Therefore, the use of the improved scheme as a near-backup protection has a better performance of action than the impedance correction scheme when going through different ground resistance faults. From the data in
Table 4,
Table 5,
Table 7,
Table 8,
Table 10 and
Table 11, it can be seen that the action time of the improved scheme is smaller than that of the traditional protection scheme and impedance correction protection scheme, whether as the main protection or remote backup protection. Therefore, the action performance of the improved protection scheme is better than that of the traditional protection scheme and the impedance correction protection scheme when the grounding resistance fault occurs.
- (2)
Fault type effect
Take the data in
Table 3 and
Table 4 as an example to analyze the impact of different fault types on the improved protection scheme.
Table 3 shows that when single-phase grounded short-circuit fault, two-phase short-circuit fault, and three-phase short-circuit fault occur without grounding resistance, the action time of the improved protection scheme is shortened compared with the traditional protection scheme and impedance correction protection scheme. It can be seen from
Table 4 that when single-phase ground fault, two-phase ground short circuit fault, and three-phase short circuit fault occur respectively through the grounding resistance, the action time of the improved protection scheme is not longer than that of the traditional protection scheme and impedance correction protection scheme. Therefore, when different types of faults occur, the operation performance of the improved scheme is better than that of the traditional protection scheme and impedance correction protection scheme.
- (3)
Fault location impact
The data in
Table 4,
Table 7 and
Table 10 are used to analyze the impact of faults in different lines on the improved protection scheme. In the event of a three-phase short-circuit fault on the line, the action time of the improved scheme is less than that of the traditional protection scheme, and no greater than that of the impedance correction protection scheme. The analysis of two-phase short-circuit grounding and single-phase short-circuit grounding is the same as that of the three-phase short-circuit. Therefore, when faults occur on different lines, the operation performance of the improved scheme is better than that of the traditional protection scheme and impedance correction protection scheme.
Based on the above analysis, it can be seen that compared with the traditional ITOC protection and IA-ITOC protection schemes, the proposed IIA-ITOC protection scheme has better action performance under different fault types and fault locations, whether acting as main protection or backup protection. IIA-ITOC protection can effectively improve the protection speed and performance while ensuring selectivity.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}