1. Introduction
Online shopping has become popular with the development of digitization over the past decade [
1]. With the restrictions and social distancing imposed during the first and second wave of the COVID-19 pandemic, an increasing number of people explored online purchasing for groceries for the first time. In this context, traditional brick-and-mortar retailers were offered an opportunity to build or improve omnichannel solutions for their businesses [
2].
Among different ways to design an omnichannel model [
2,
3], a straightforward and widely used method is utilizing the already existing brick-and-mortar structures for both regular walk-in customers and online order fulfillment [
4]. The focus of this work is based on this paradigm, referred to as the Buy-Online-Pick-up-in-Store concept (BOPS). It allows an effective mixed online–offline business model transition with the least amount of time and financial resource investments required.
Due to the fact that this is a relatively new topic, the existing literature is limited. A literature search revealed that the majority of the focus is on marketing and management aspects such as service area [
5], pricing strategy [
6], and inventory levels [
7], while operational optimization is rarely mentioned. As a result, it is not surprising that the retailer providing data for this study had little to no optimization in place for the BOPS in-store operations: the employees receive shopping lists in a random order, they go through the store similar to regular customers to pick up all the items, and then go to the cashier to scan the products and place them in the final bags. Following this description, two major issues emerge: the non-optimized picking path, which has a longer travel time, and the need to pass through the cashier, both of which result in an inefficient use of the available human resources.
In this work, we discuss different optimization methods to solve these major issues in terms of the picking and packing process, and we propose a comprehensive optimization strategy that reduces the overall human resource time required and guarantees the quality of packaging to prevent potential damage.
The remainder of this work is structured as follows: in
Section 2 the existing literature related to the topics addressed in this research is reviewed. In
Section 3, we optimize the picking process in the BOPS model with different routing analyses. In
Section 4, a two-step optimization, which improves packing efficiency by calculating the minimum number of bags needed for a shopping list and balances the volume and weight of the products packed in the available bags, is discussed. As the picking time performance improved when both optimizations were implemented, experimental simulation on fully optimized shopping lists was performed in
Section 6. A summary of the accomplishments of the work and further discussions are finally presented in
Section 7.
2. Literature Review
With the growing amount of interest in the topic of Buy-Online-Pick-up-in-Store, the majority of the research up to this point has focused on the effects that launching a BOPS channel would have on the previously existing store. For example, one work [
8] investigates how inventory holding costs and lost sales costs are influenced by giving walk-in customers a higher priority than BOPS customers, and how this influence varies depending on whether the BOPS is owned by the shop or by a third party. The work [
9] analyzes a Stackelberg game theoretic model involving a manufacturer and a retailer to determine how shop prices should fluctuate in response to the manufacturer’s product quality and which scenarios are profitable. There is plenty of research [
5,
6,
7,
10,
11,
12], which is helpful in determining if it is beneficial to open the BOPS channel and start planning for a well-functioning business model, but they provide no guidance on how operations should be organized, which is vital for the long term success of the BOPS channel.
When the search is expanded to include similar topics, a ship-from-store concept is studied in [
13]: in both the concept and the BOPS model, customers place orders via an application or a website and employees go through the store to pick the products. The authors propose a model to determine the optimal time to batch multiple orders before the picking operation is started, the optimal time before starting the delivery process of orders, and the optimal number of pickers and packers. However, this model is not very practical in grocery stores, as the batching/reassembling operations applied to the problem would significantly increase the complexity of the task due to the high number of items on shopping lists, thus implementation of this strategy is not recommended in the scenario of this BOPS research. Similarly in [
14], a methodology is proposed to compute the minimal picking rate under single wave or multi wave picking given a demand ordered between two cutoff times and an objective service level. The picking operation is not modeled, but they assume that there exists a certain picking rate
to be defined before the proposed model can be used to validate strategies. A research gap can therefore be identified, given the fact that in the literature no approach optimizing grocery store order picking in a BOPS system was found.
Order picking in warehouses is a well examined topic, with an extensive body of work investigating routing, storage, and batch assignment that aims at optimizing and automatizing costly operations [
15]. These approaches can not however be utilized in the BOPS contexts, due to the differences in terms of layout, means of transport, and stored units. In fact, while in warehouses one can use robots for moving Unit Load Devices or place the most frequently picked items in easy to reach spots, in brick-and-mortar stores the presence of regular customers and the different packaging shapes makes the implementation of robots almost impossible. Since the design methodology of the stores is selling products, the main factors taken into account are revenue maximization [
4] and customer satisfaction [
16]. This is accomplished by having a good variety, visibility, and availability of products positioned in strategic ways that increase impulsive purchases, but has no correlation with an employee who picks the articles according to a given shopping list.
From the customers’ perspective, the in-store picking problem has been discussed in [
17]. By analyzing customers’ locations detected through devices on the shopping carts, the paper revealed that customers whose path was closer to the shortest path tended to buy items from frequently purchased product categories with higher numbers of products. Larger shopping baskets lead to higher deviations from the optimal path, and most deviations are not caused by not following the optimal zone order but by not taking the shortest route between them. However, if an employee is given an optimized shopping list to pick up all the items, he/she can take the shortest route following the optimal zone order to improve efficiency. In the work [
18], they propose solving the in-store picking problem as an open Traveling Salesman Problem (TSP) on an underlying graph representing the location of the items within the shop. This resulted in a significant increase in performance by picking time.
Considering that in-store logistics are typically handled by people and labor is a major cost-driver, such an approach makes sense in the BOPS context. However, the peculiar item disposition can lead to potential product damaging, since product attributes such as mass, size and fragility are not taken into account when designing the layout [
4,
16] or optimizing the picking route as a TSP. Therefore, constraints regarding the features of the articles are taken into account in [
19] and the problem is solved as a Sequential Ordering Problem [
20].
The packing problem in a retail context in the BOPS model has not been addressed in the literature thus far. An inspiring point to this work is the bin packing problem [
21] or 3D bin packing problem [
22], which is usually used for the design of item positioning on unit load devices such as containers and pallets.
3. The Picking Problem
3.1. Problem Statement
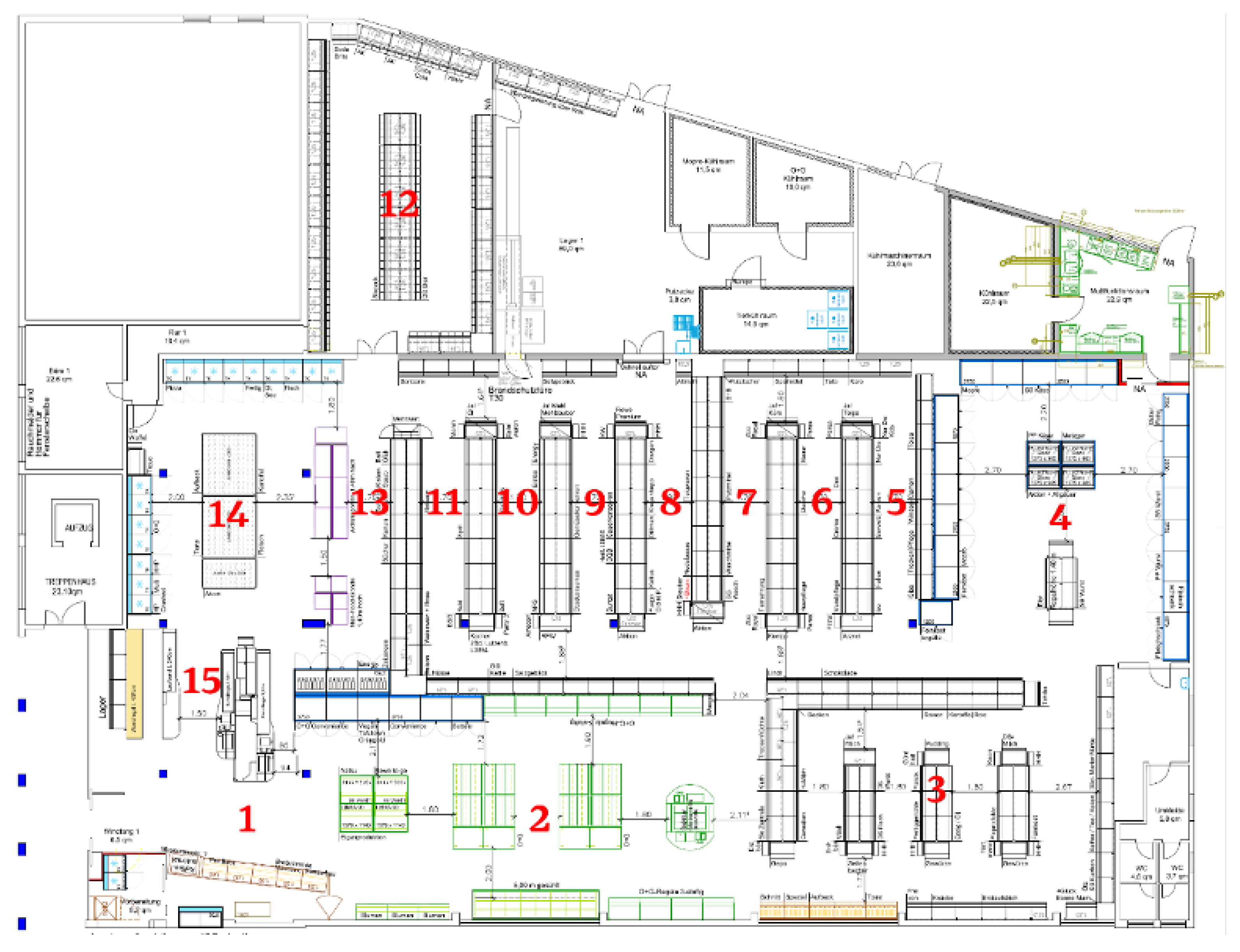
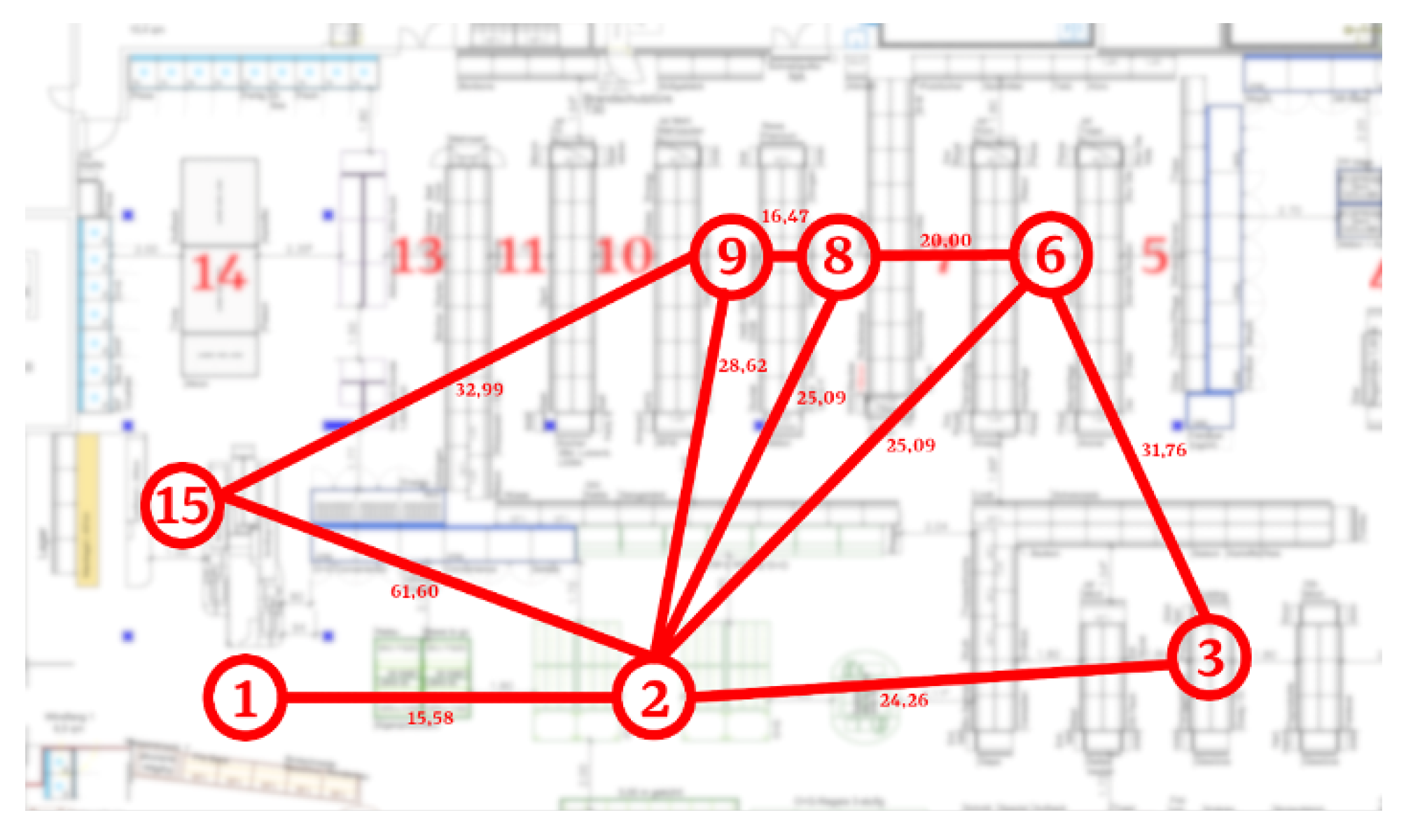
The research is based on data made available by a German retailer with the layout of one of their stores and real BOPS orders placed online to be picked up at the store. Following the idea of [
17,
18], the layout of the store was divided into 15 zones (
Figure 1) according to the locations and product categories. Zone 1 contained the entrance and zone 15 contained the exit. Each product is located in a certain zone. By assuming each product in the given zone has an equal probability of being picked, we are able to define the center of zones and calculate the approximated distances
between zone
i and zone
j (
). With a walking speed estimated at 0.85 m/s, the approximate travel time between different zones is shown in
Table 1.
A BOPS order is a list of products to be picked by an employee of the store. To complete our simulation analysis in this work, each product has the attributes of volume, mass, density and type of packaging on top of the zone containing it.
As stated in
Section 1, for retailers such as the one under investigation, there is currently no optimization being developed relative to the in-store picking process of BOPS orders. A list of articles is usually presented alphabetically or randomly to the person in charge. After a preliminary review of the list, an experienced employee normally uses the store topology to self-organize a time- and distance-saving path through the store based on their knowledge of the store. In practice, however, pickup of online orders is frequently assigned to part-time workers with marginal experience. In such a case, a simple optimization aiming at minimizing the travel distance to fulfill the orders can be proposed. Extended modeling with impacts of the employees’ characteristics on the optimization approach is expected in a future work.
In the following subsections, we introduce three shortest path-like analyses that focus on different aspects to optimize the picking process.
3.2. The Open Traveling Salesman Problem
An Open Traveling Salesman Problem (TSP) is an NP-hard problem in the field of combinatorial optimization that asks the following question: ‘Given a list of customers to whom some products have to be transported, what is the shortest route that connects a start depot (at which products are loaded) and an end depot (where the vehicle is parked after the tour) while visiting all customers?’
The problem can therefore be represented by a weighted directed graph , where V is the set of customers/depots that needs to be visited, and is the set of edges connecting all the vertices pairs. To each edge a cost is associated, which can be the distance or the time required to travel from customer/depot i to customer/depot j. The objective is to find the set S of edges that connects the start and end points in such a way that each vertex in V is considered one and only one time, all the edges are adjacent, and the sum of the costs is minimized.
The TSP can be formulated and solved easily since it has been well studied by many approaches [
23,
24,
25].
As in-store logistics is one of the main cost drivers, it has been proven that sequencing the orders by the TSP solution can effectively improve the picking time performance [
18]. However, as mentioned earlier, the lack of consideration in item placement inside bags can lead to potential product damage, thus, an extra time cost is expected for rearrangements. Therefore, a constraints based on product attributes should be considered [
19] with respect to the shortest route analysis. The problem is then solved as a Sequential Ordering Problem in the following section.
3.3. The Sequential Ordering Problem
A Sequential Ordering Problem (SOP) is again an NP-hard problem in the field of combinatorial optimization that asks a question similar to the open TSP: ‘Given a start depot, a list of customers, and an end depot, with the distances between each pair of depot-customer or customer-customer and a set of precedence constraints between customers, which is the optimal shortest route that connects the start and end depot while visiting all the customers and satisfying the precedence constraints?’
The SOP formulations and solvers can be found in [
20,
26,
27,
28].
In this problem, we sorted the products from the most resistant to the most fragile. Therefore, we defined the precedence on the products not zones. A priority score was assigned to each product based on chosen attributes combined through a weighted sum model. We applied the scoring model proposed in a previous work [
19], in which the scores(
SC) for
mass,
volume, and
density were defined by ad hoc piecewise functions simulated by the impacts of the attributes based on their value. The scores for the
packaging type (
packSC) were assigned based on estimated sturdiness. The weights of the attributes were manually adjusted based on real-world simulations. In this work, the weights are given as follows:
By turning the scores of the articles into the precedence constraints, the in-store picking problem could be solved as the SOP defined. Note that the scores in this work were defined for the retailer we studied, which considered basic requirements. It can also be adjusted or extended to fit with specific needs such as the temperature, potential water vapor effects on paper packages, and the smell of certain fresh foods.
3.4. The Relaxed SOP
In reality, if we strictly followed all the precedence constraints in the SOP, a lot of back and forward movements would be expected, which would lead to significantly longer times to complete the picking operation. This inefficiency is contrary to the original intention of the benefits of solving the problem as a SOP. Therefore, in this section, we propose a Relaxed SOP model to create a tradeoff between priorities and total picking time.
By assuming that products with similar priority scores have similar characteristics in terms of fragility/sturdiness, a tradeoff between damage prevention and time required for the operation can be achieved by defining a limited number of precedence classes, each one containing products with similar characteristics that can be considered as equivalent in terms of damage resistance. In such a way, each product is assigned to one of the subgroups depending on its priority score. Precedence among products in the same group is then relaxed. The number of classes can be adjusted depending on specific needs. In this work, we divided the products into four precedence classes.
4. The Packing Problem
In
Section 3, we introduced different in-store routing methodologies that can optimize the picking process. With the implementation of a ‘scan-as-you-pick device’ that is gradually becoming popular in stores, the employees performing the picking operation are able to scan and pack the products during the picking process without the need of a cashier later on to produce the bill. In such a context, employees could, however, have difficulty distributing evenly and safely all the products into the shopping bags, in order to avoid too heavy/full or light/empty imbalance issues.
To solve this problem and make the packing operation more efficient, a two-step optimization is developed, as described in [
29], that first calculates the minimum number of bags needed for a given shopping list and balances the content of the bags by minimizing the differences of weight and volume of the products contained in each pair of bags. The first step is to determine the minimum number of bags required
for a given shopping list. The following formulation is based on a classic Bin Packing problem [
21]. We define
as the set of products and
as the set of available shopping bags. The volume and weight of each product
are represented as
and
, respectively. The content of each shopping bag cannot exceed a maximum volume
and a maximum weight
. Two binary variables are also defined:
takes the value 1 if product
i is in packed bag
j, 0 otherwise, and
if bag
j is used, 0 otherwise. The problem can be then written in the following way:
The constraints (
2) and (
3) restrict the articles in each bag from exceeding the maximum weight and volume. Constraint (
4) enforces each article to be in one and only one bag.
When there is more than one bag required for the shopping list, the second optimization step is to balance the contents of the bags as evenly as possible. This is realized by solving a Min-Max problem [
30]. We define
as the set of bags to be used,
z as the minmax variable.
,
,
and
are technical variables required to minimize the difference between the volume and weight of each pair of bags. The problem can be written as follows:
With constraint (
8) and (
9), each shopping bag contains products that sum up to a similar volume and weight. The minmax constraints for the distance variables are shown in (
10) and (
11). The distance variables
,
,
and
are nonnegative.
In practice, different types of bags may be required for different products. In such a case, the products should first be classified according to the type of bag required, then the algorithm can be applied to each subgroup. As minimizing the number of bags is an environmental friendly intention, customers can also choose to use paper bags, reusable plastic boxes, or their own bags for the same purpose. Correspondingly, the classification of the products based on the bags can be customized. The model itself is adaptable to these changes.
5. Combined Picking and Packing
By applying the packing process with the two-step optimization in
Section 4, it is easy to combine with the picking strategies in
Section 3 that indicate the proper route to pick the articles in a certain order. The hybrid strategies allow the employee to collect each item, scan it and place it in the final shopping bag all at the same time. The shopping bags are then ready to go at the end of a picking process.
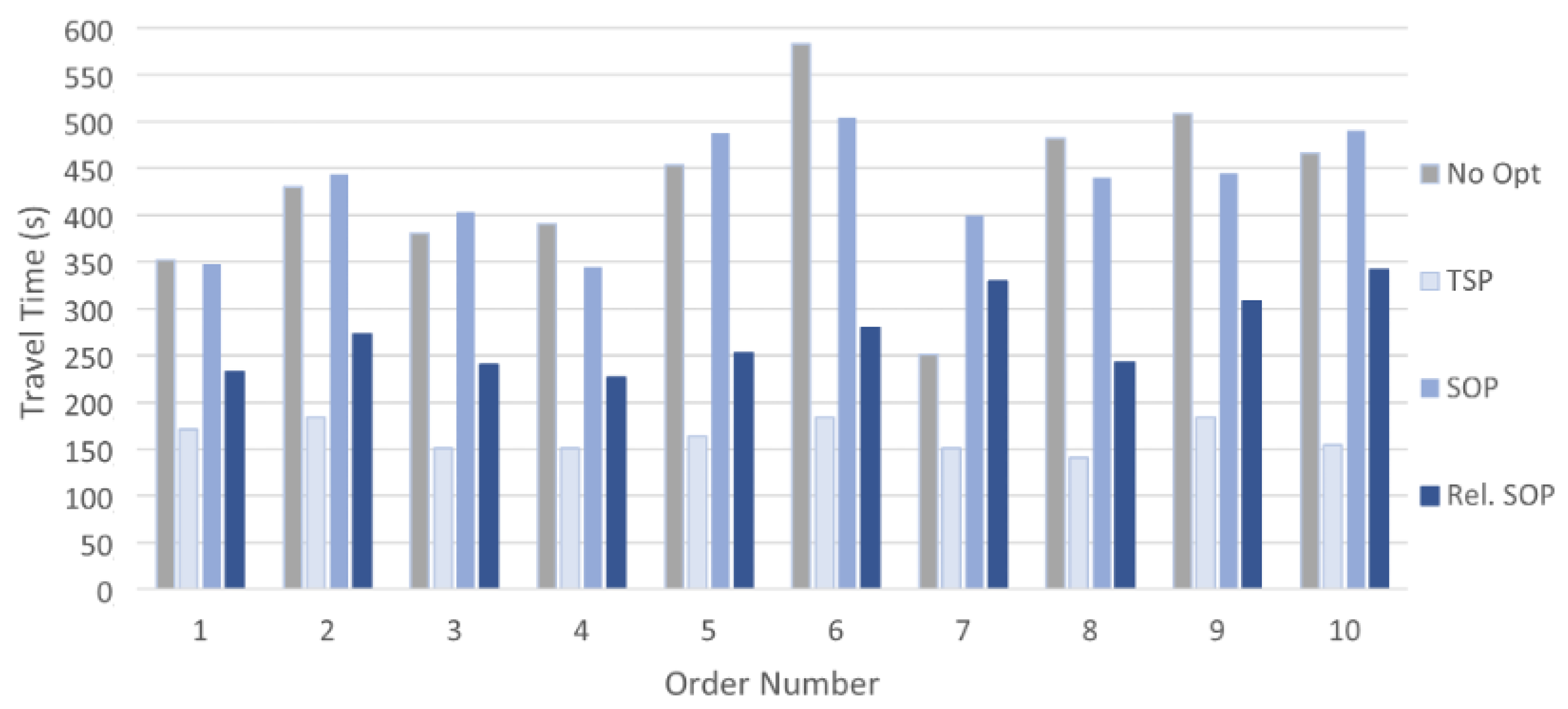
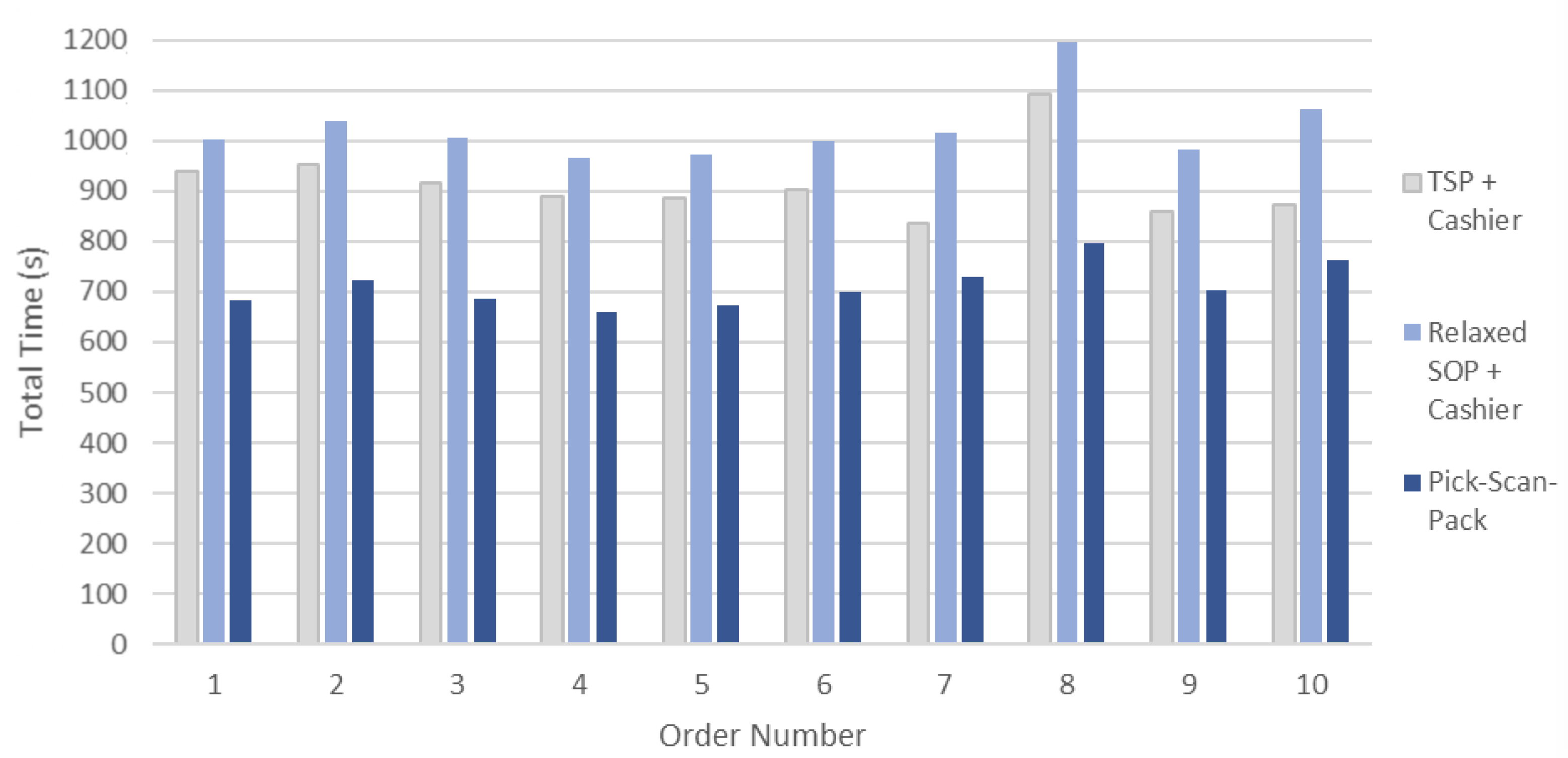
For a comprehensive understanding of optimization strategies in both the picking and packing process, we consider the following scenarios:
TSP solution in which products are scanned and packed at the cashier (this will be referred to as TSP + cashier);
SOP solution in which products are scanned and packed at the cashier (this will be referred to as SOP + cashier);
SOP solution in which products are scanned and packed during the picking operation by using a scan-as-you-pick device (this will be referred to as pick-scan-pack model for SOP);
Relaxed SOP solution in which products are scanned and packed at the cashier (this will be referred to as Relaxed SOP + cashier);
Relaxed SOP solution in which products are scanned and packed during the picking operation by using a scan-as-you-pick device (this will be referred to as pick-scan-pack model for Relaxed SOP).
We do not consider the scenario of TSP with scan-as-you-pick device because of potential damage to the products.
7. Conclusions
This research on optimization strategies for Buy-Online-Pick-up-in-Store order fulfillment aspired to improve omnichannel in-store logistics operations for brick-and-mortar grocery retails. The aim of the present study was, in particular, to provide process optimization tools for retailing shops. Different optimization approaches were discussed for the in-store order picking and packing problem. With experimental simulations carried out on real orders, we demonstrated that the optimization on routing performs better in terms of damage prevention and does not increase the travel time required. Moreover, it gives the possibility to pick safely, scan, and pack the products simultaneously. With further optimization that balances the distribution of products in different shopping bags coupled with the use of scan-as-you-pick devices, the performance of the overall optimization strategy is excellent.
All optimizations discussed in this work are practical and easily applicable in most Buy-Online-Pick-up-in-Store systems. Further extensions of the work can also move from the deterministic to stochastic settings by considering the modeling of the pickers’ behavior and the presence of regular walk-in customers.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}