
Comparative Study of DE, PSO and GA for Position Domain PID Controller Tuning

Abstract
:1. Introduction
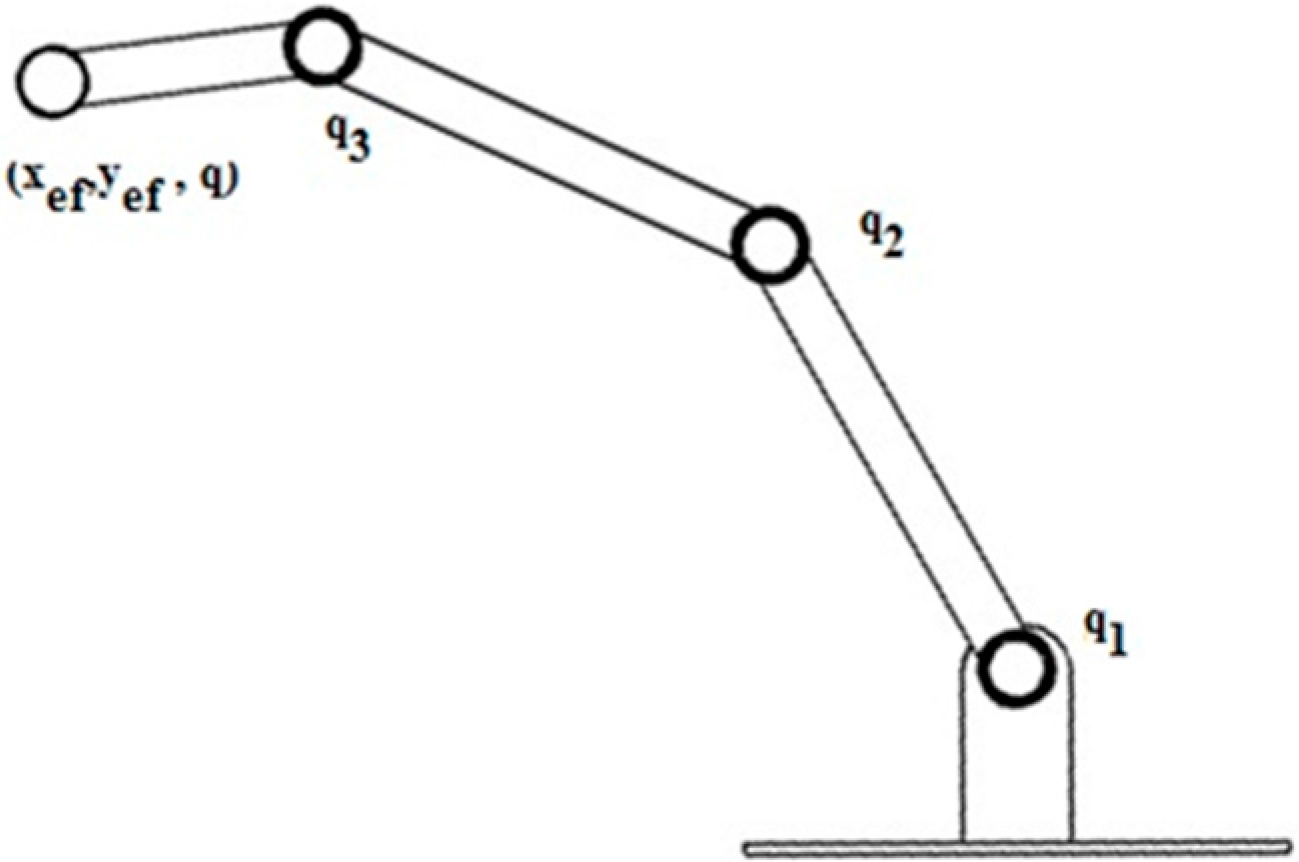
2. Position Domain Control for Contour Tracking
2.1. Relative Derivatives and Position Domain Mapping
2.2. Dynamic Model in Position Domain
2.3. PDC-PID Control Law
3. Optimization Algorithms
3.1. Differential Evolution
3.2. Genetic Algorithm
3.3. Particle Swarm Optimization
4. Optimization Process
4.1. Dynamic Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Mass | Length | Centre of Mass | Inertia |
|---|---|---|---|---|
| 1 | 1.00 | 0.50 | 0.25 | 0.10 |
| 2 | 1.00 | 0.50 | 0.25 | 0.10 |
| 3 | 0.50 | 0.30 | 0.25 | 0.05 |
- act as an approximation of the static coeffient of friction
- is the equivalent of the Stribeck friction effect
- is the term representing Coulomb friction
- is the viscous dissipation term [21].
| Parameter | Value |
|---|---|
| 3 | |
| 100 | |
| 10 | |
| 0.1 | |
| 100 | |
| 0.01 |
4.2. Contours
| Contour Type | Linear | Circular |
|---|---|---|
| Starting Point | ||
| Ending Point | ||
| Maximum Joint Speed | ||
| Duration | 8 |
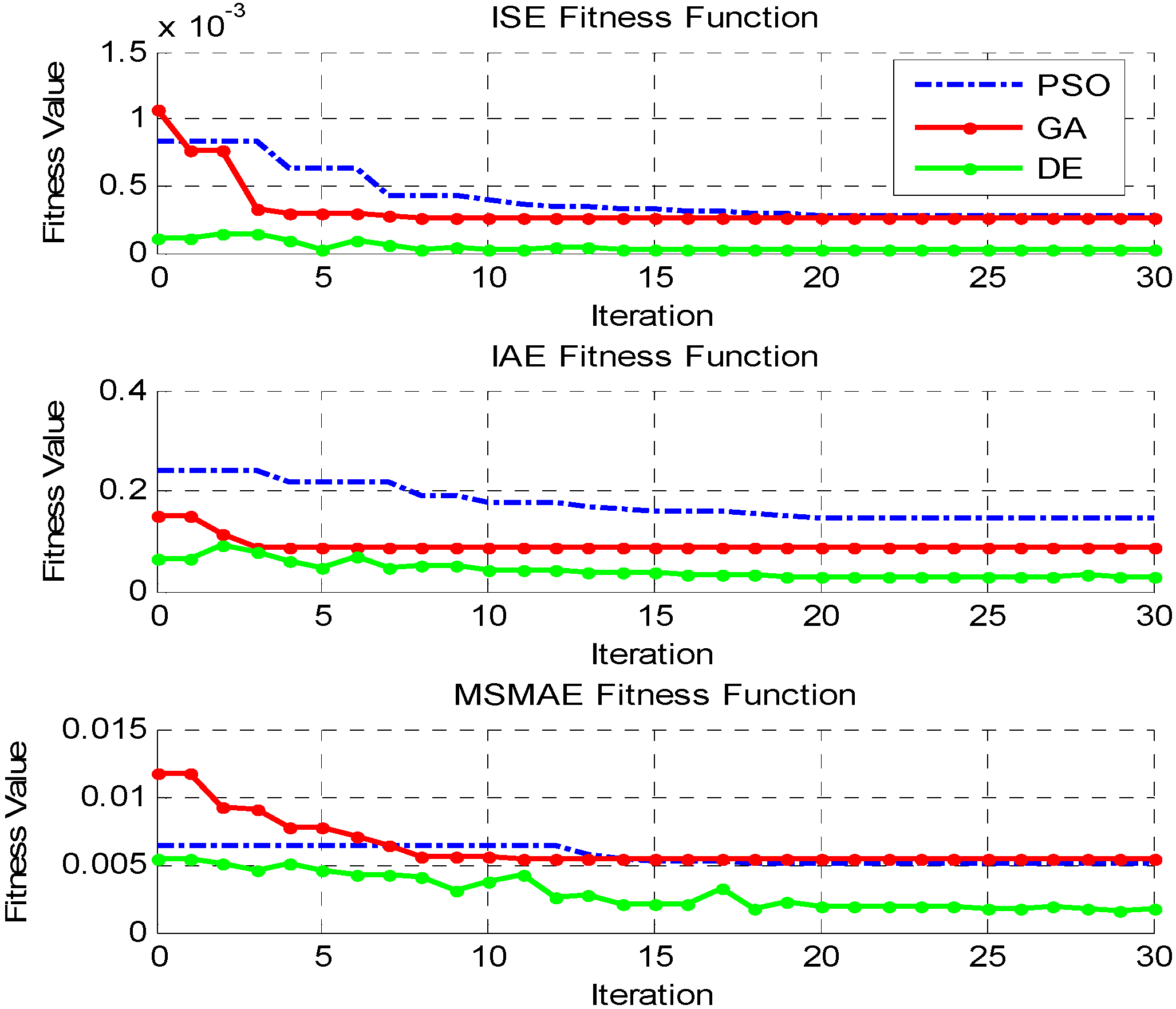
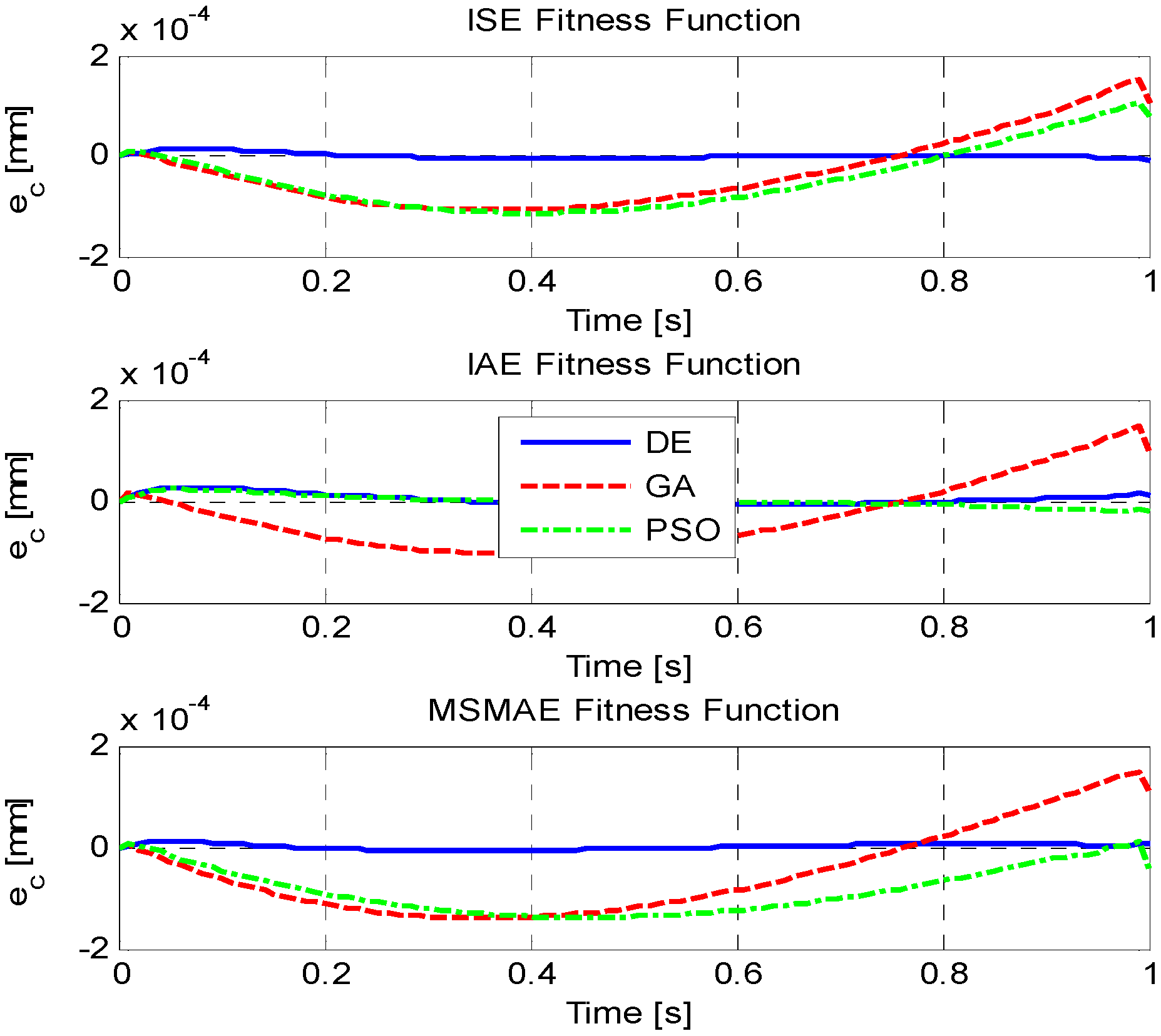
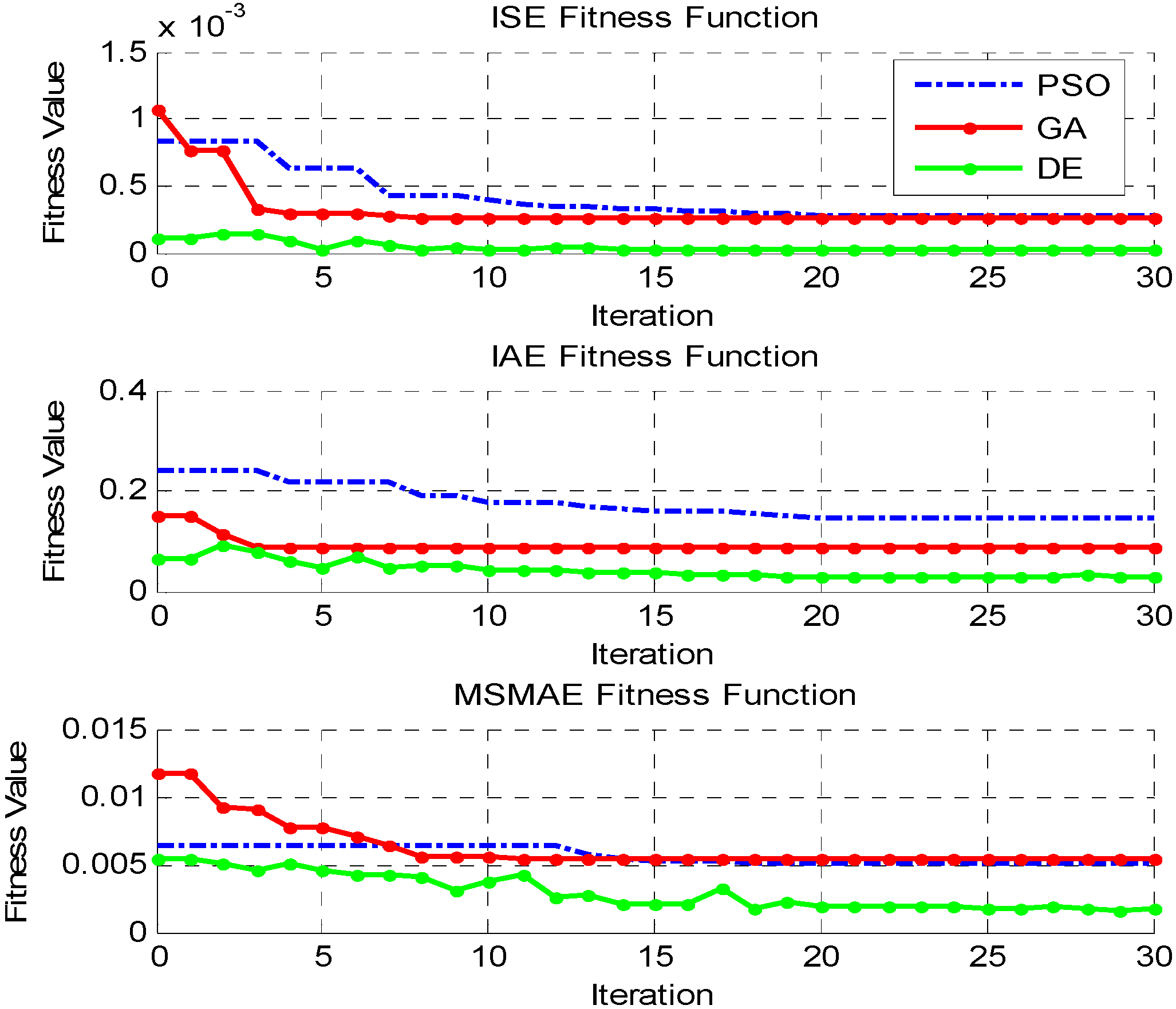
4.3. Fitness Functions
4.4. Optimization Parameters
| Master Motion Sampling Frequency | 100 [Hz] |
| Population Size | 30 |
| Maximum Allowed Iterations | 30 |
| Feasible Bounds of gain | 0– |
| Optimization Method | Optimization Parameter | Value/Method |
|---|---|---|
| Differential Evolution | 0.7 | |
| 0.8 | ||
| Genetic Algorithm | Selection | Stochastic Universal Sampling * |
| R | 1 | |
| Mutation | Gaussian * | |
| Particle Swarm Optimization | 0.5 | |
| 1.0 |
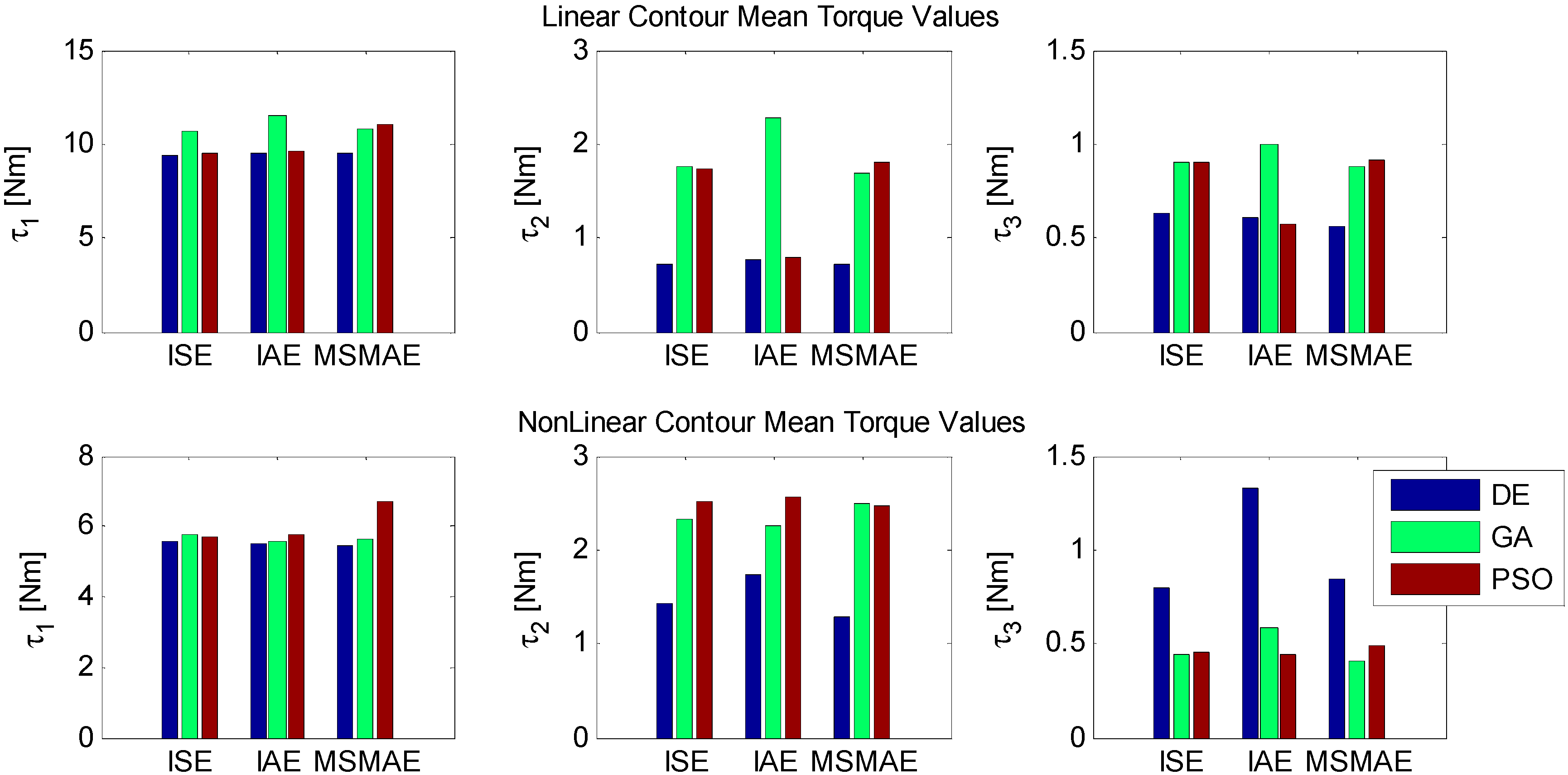
5. Results
| Optimization Algorithm | Fitness Function | |||
|---|---|---|---|---|
| DE | ISE | |||
| IAE | ||||
| MSMAE | ||||
| GA | ISE | |||
| IAE | ||||
| MSMAE | ||||
| PSO | ISE | |||
| IAE | ||||
| MSMAE |
| Algorithm | Fitness Function | |||
|---|---|---|---|---|
| DE | ISE | |||
| IAE | ||||
| MSMAE | ||||
| GA | ISE | |||
| IAE | ||||
| MSMAE | ||||
| PSO | ISE | |||
| IAE | ||||
| MSMAE |

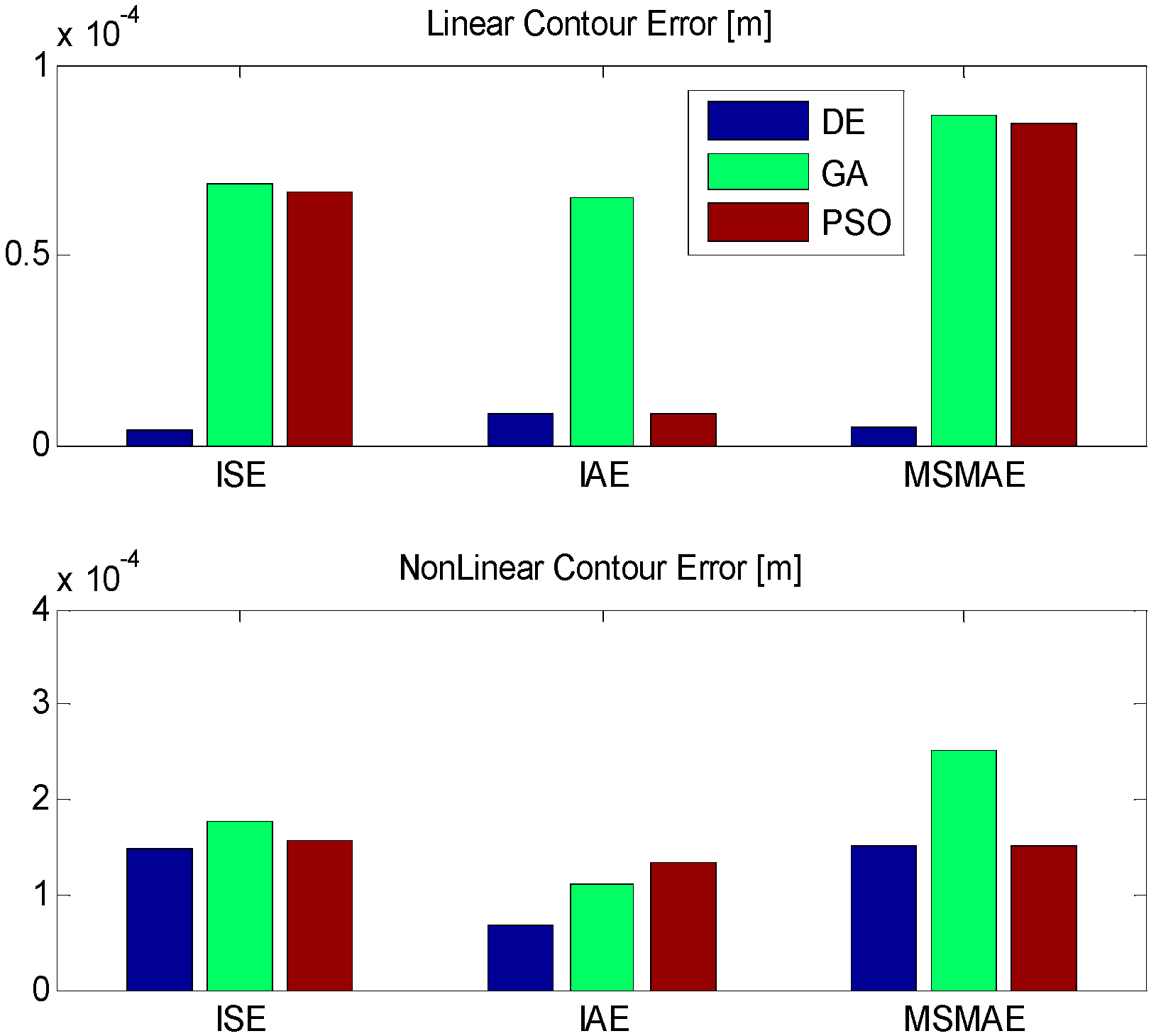
| Algorithm | Linear Contour | Nonlinear Contour | |||||||
|---|---|---|---|---|---|---|---|---|---|
| (Mean) | (Mean) | (Mean) | (Mean) | (Mean) | (Mean) | ||||
| DE | ISE | ||||||||
| IAE | |||||||||
| MSMAE | |||||||||
| GA | ISE | ||||||||
| IAE | |||||||||
| MSMAE | |||||||||
| PSO | ISE | ||||||||
| IAE | |||||||||
| MSMAE | |||||||||



6. Conclusion
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Cominos, P.; Munro, N. PID Controllers: Recent Tuning Methods and Design to Specification Control Theory and Applications. IEE Proc. Control Theory Appl. 2002, 149, 46–53. [Google Scholar] [CrossRef]
- Kachitvichyanukul, V. Comparison of Three Evolutionary Algorithms: GA, PSO and DE. Ind. Eng. Manag. Syst. 2012, 11, 215–223. [Google Scholar] [CrossRef]
- Chandrasekar, K.; Ramana, N.V. Performance Comparison of GA, DE, PSO and SA Approaches in Enhancements of Total Transfer Capability Using FACTS Devices. J. Electr. Eng. Technol. 2012, 7, 493–500. [Google Scholar] [CrossRef]
- Kumar, A.; Gupta Rajeev, R. Compare the Results of Tuning of PID Controller by Using PSO and GA Technique for AVR System. Intern. J. Adv. Res. Comput. Engin. Technol. 2013, 2, 2131–2138. [Google Scholar]
- Ou, C.; Lin, W. Comparison Between PSO and GA for Parameter Optimization of PID Controller. IEEE Intern. Conf. Mechatron. Autom. 2006. [Google Scholar] [CrossRef]
- Saad, M.S.; Jamaluddin, H.; Darus, I.Z. Implementation of PID Controller Tuning Using Differential Evolution and Genetic Algorithm. Intern. J. Innov. Comput. Inf. Control. 2012, 8, 7761–7779. [Google Scholar]
- Dong, R. Differential Evolution versus Particle Swarm Optimization for PID Controller Design. Intern. Conf. Nat. Computat. 2009, 3, 236–240. [Google Scholar]
- Hassan, R.; Cohanim, B.; de Weck, O. A Comparison of Particle Swarm Optimization and Genetic Algorithm. In Proceedings of the 1st AIAA Multidisciplinary Design Optimziation Specialist Conference, Austin, TX, USA, 18–21 April 2005; pp. 18–21.
- Ouyang, P.R.; Huang, J.; Zhang, W.J.; Dam, T. Contour Tracking Control in Position Domain. Mechatronics 2012, 22, 934–944. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Pano, V.; Dam, T. PID Position Domain Control for Contour Tracking. Intern. J. Syst. Sci. 2015, 46, 111–124. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Pano, V. Position Domain Synchronization Control of Multi-Degrees of Freedom Robotic Manipulator. ASME J. Dyn. Syst. Measurem. Control. 2014, 136, 021017. [Google Scholar] [CrossRef]
- Koren, Y. Cross-Coupled Biaxial Computer Control of Manufacturing Systems. ASME J. Dyn. Syst. Measurem. Control. 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Yeh, S.; Hsu, P.L. A New Approach to Biaxial Cross-Coupled Control. In Proceedings of the IEEE International Conference on Control Applications, Anchorage, AK, USA, 25–27 September 2000; pp. 168–173.
- Koren, Y.; Lo, C.C. Variable Gain Cross-Coupling Controller for Contouring. Ann. CIRP 1991, 40, 371–374. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Panda, S. Robust Coordinated Design of Multiple and Multi-Type Damping Controller Using Differential Evolution Algorithm. Electr. Power Energy Syst. 2011, 33, 1018–1030. [Google Scholar] [CrossRef]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Massachusetts, UK, 1998. [Google Scholar]
- Ladkany, G.S.; Trabia, M.B. A Novel Crossover Operator for Genetic Algorithms: Ring Crossover. Appl. Mathem. 2012, 3, 1220–1235. [Google Scholar] [CrossRef]
- Nagaraj, B.; Vijayakumar, P. A Comparative Study of PID Controller Tuning Using GA, EP, PSO and ACO. J. Autom. Mob. Robot. Intell. Syst. 2011, 5, 42–48. [Google Scholar]
- Ebbesen, S.; Kiwitz, P; Guzzella, L. A Generic Particle Swarm Optimization Matlab Function. In Proceedings of the IEEE American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 1519–1524.
- Makkar, C.; Dixon, W.E.; Sawyer, W.G.; Hu, G. A New Continuously Differentiable Friction Model for Control Systems Design. Advanced Intelligent Mechatronics. In Proceedings of the IEEE/ASME International Conference, Monterey, CA, USA, 24–28 July 2005; pp. 600–605.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, P.; Pano, V. Comparative Study of DE, PSO and GA for Position Domain PID Controller Tuning. Algorithms 2015, 8, 697-711. https://0-doi-org.brum.beds.ac.uk/10.3390/a8030697
Ouyang P, Pano V. Comparative Study of DE, PSO and GA for Position Domain PID Controller Tuning. Algorithms. 2015; 8(3):697-711. https://0-doi-org.brum.beds.ac.uk/10.3390/a8030697
Chicago/Turabian StyleOuyang, Puren, and Vangjel Pano. 2015. "Comparative Study of DE, PSO and GA for Position Domain PID Controller Tuning" Algorithms 8, no. 3: 697-711. https://0-doi-org.brum.beds.ac.uk/10.3390/a8030697