A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017


Abstract
:1. Introduction
2. Materials and Methods
2.1. European Centre for Medium-Range Weather Forecasts (ECMWF) ERA-Interim Reanalysis Data
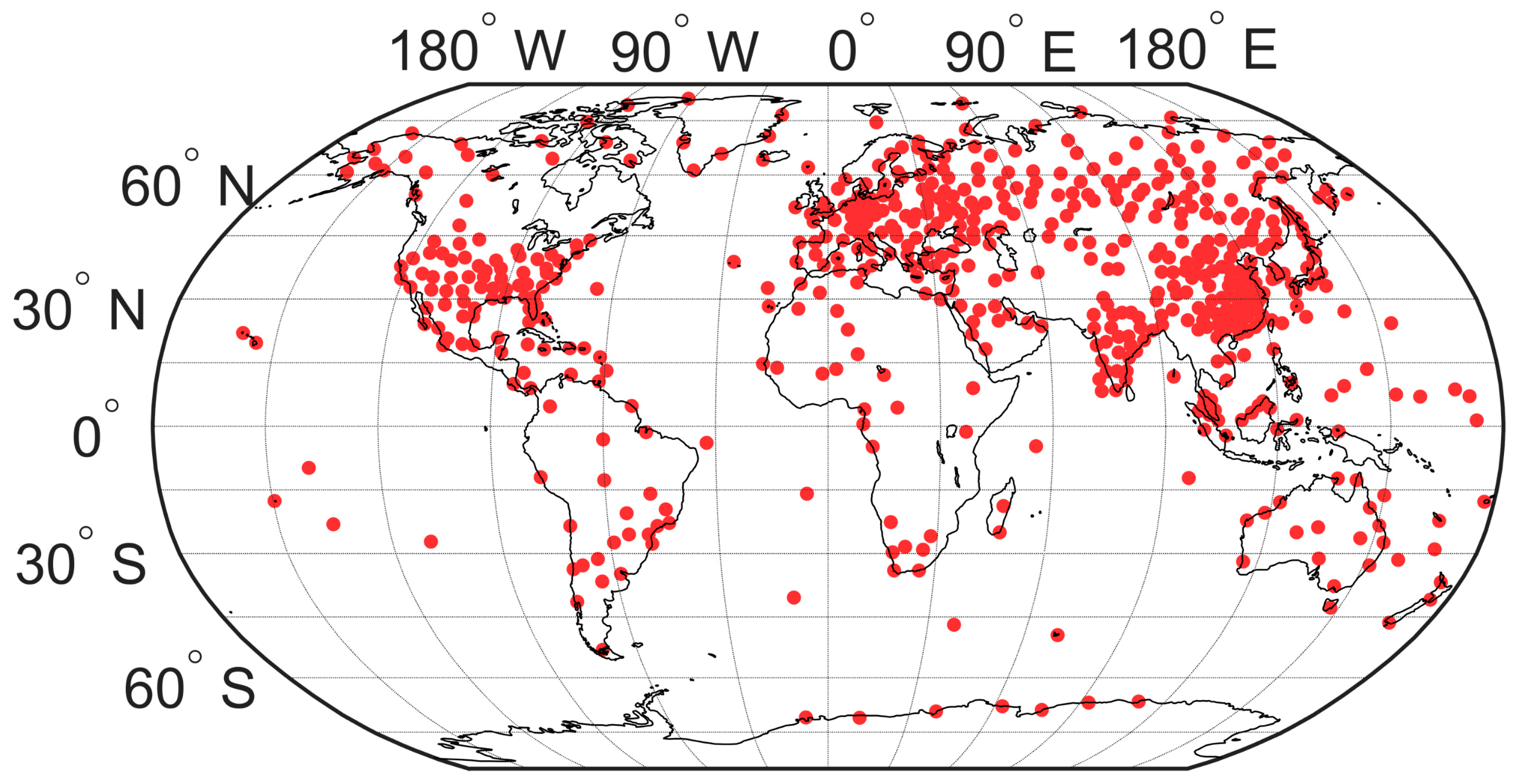
2.2. Radiosonde Data
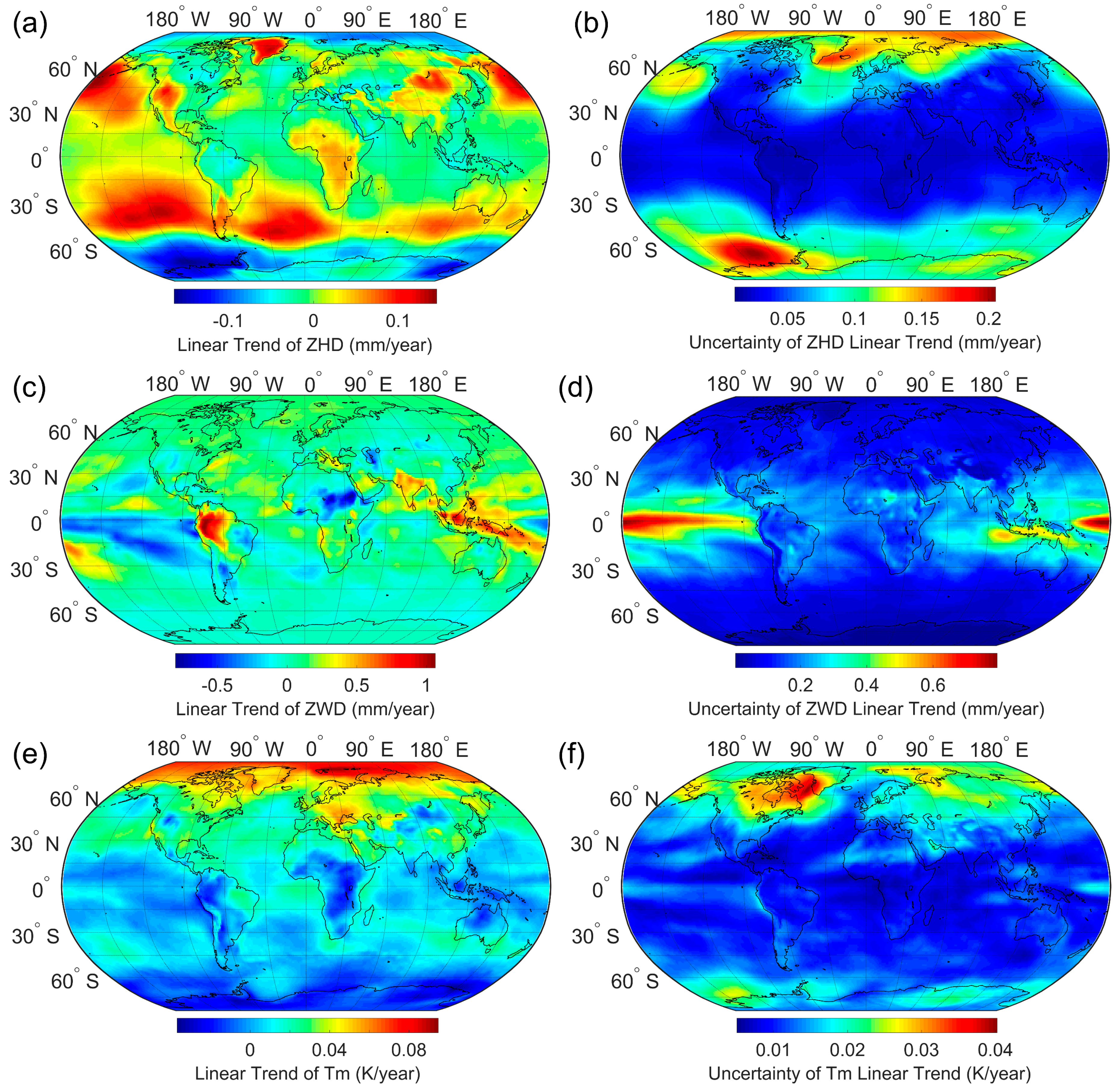
2.3. Linear Trends in Tropospheric Delay and Tm
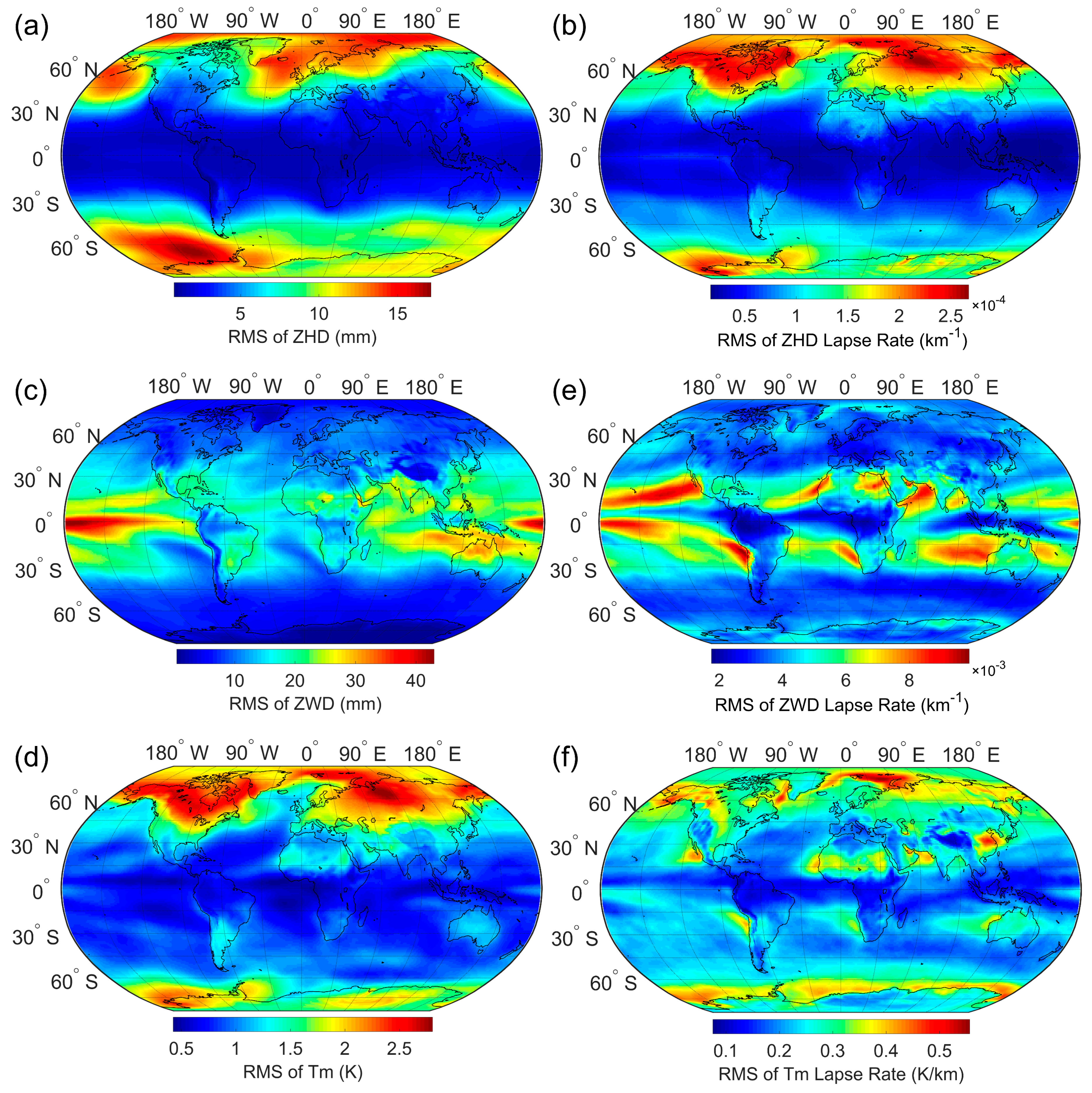
2.4. Height Corrections for Tropospheric Delay and Tm
2.5. Establishing a New Global Empirical Model
3. Results
3.1. Fitting Results of the Model
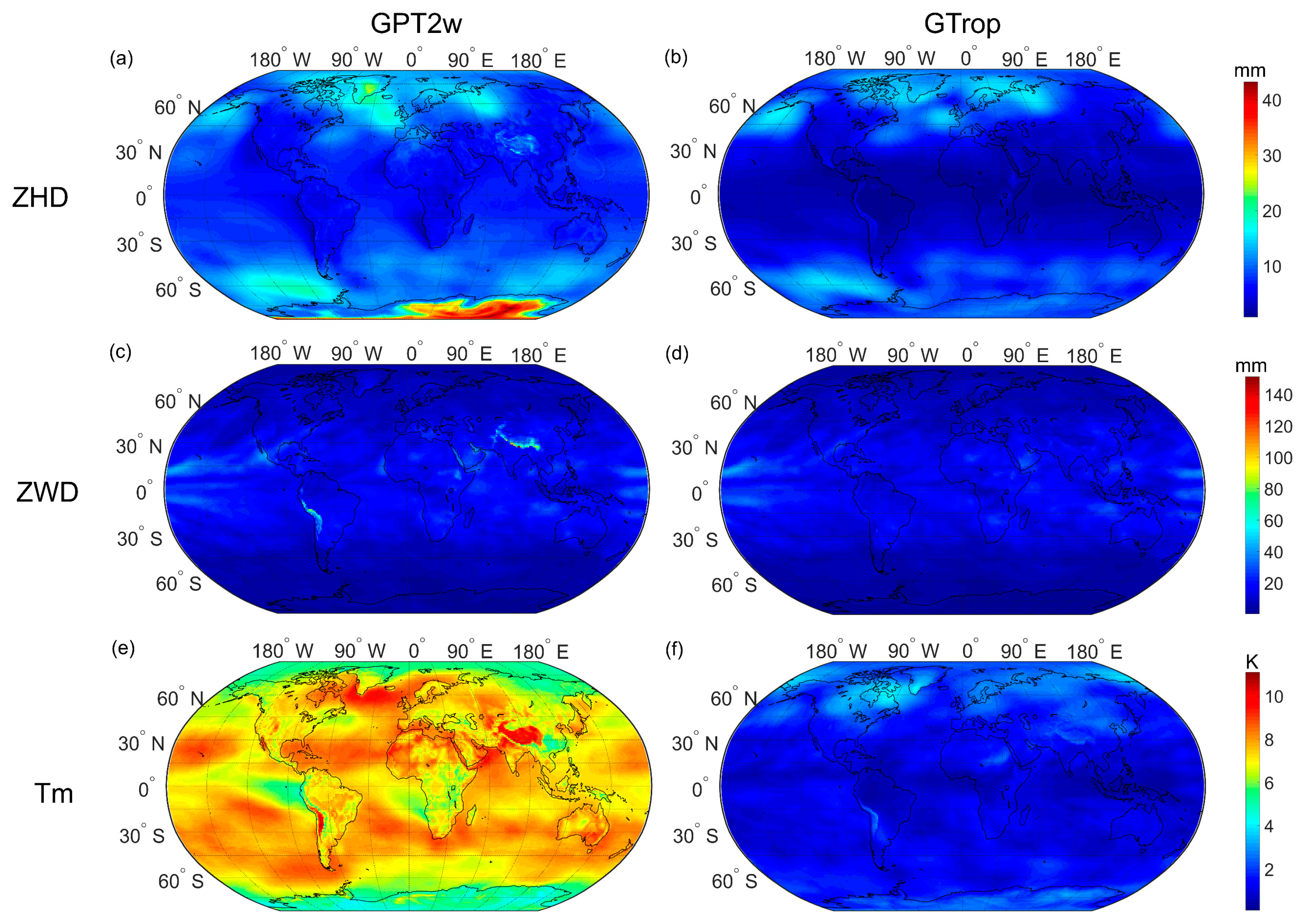
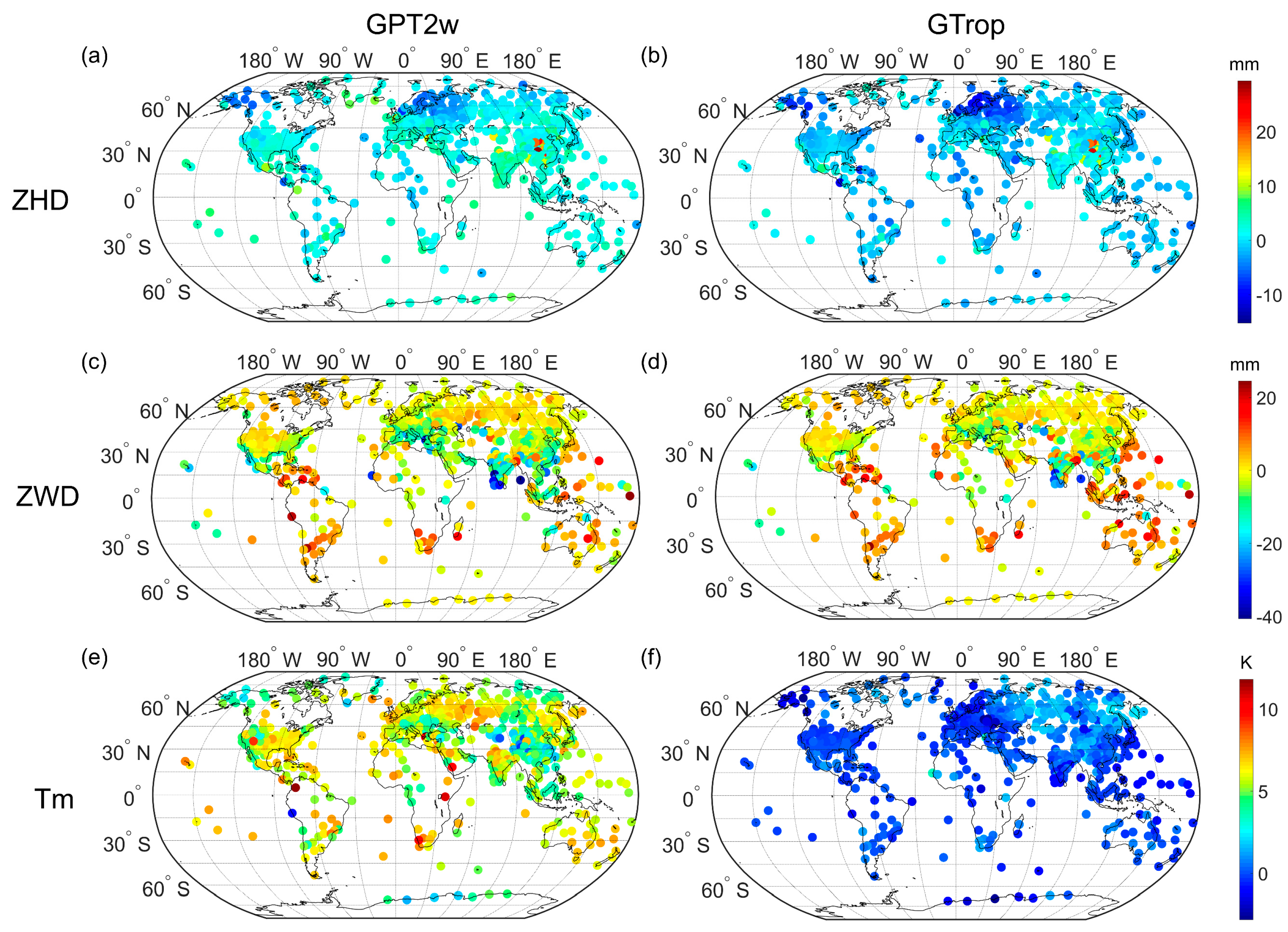
3.2. Validate the Model by European Centre for Medium-Range Weather Forecasts (ECMWF) Data
3.3. Validation of the Model by Radiosonde Data
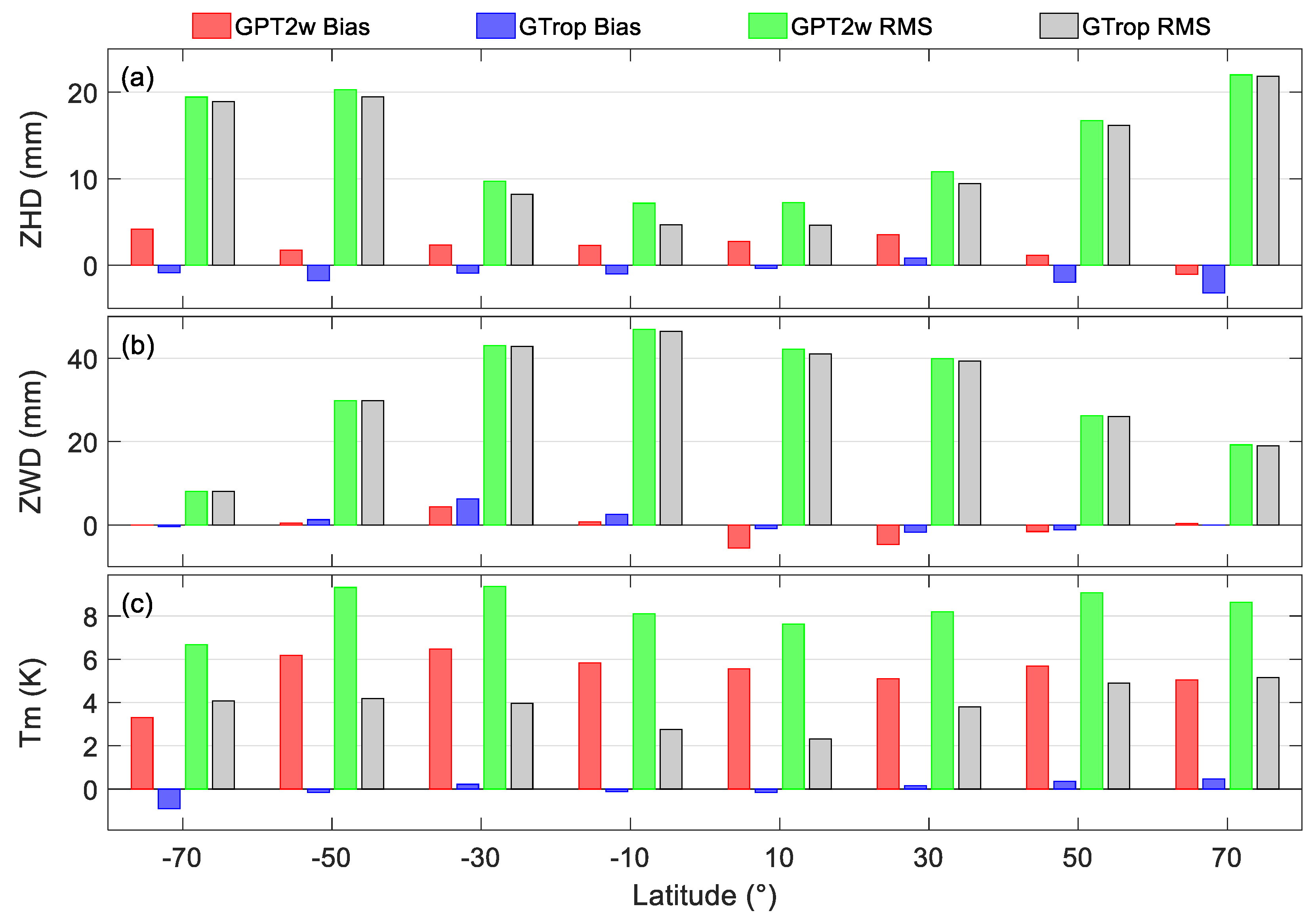
3.4. Latitudinal Variations of the Model Accuracy
3.5. Seasonal Variations of the Model Accuracy
3.6. Vertical Variations of the Model Accuracy
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Leick, A. GPS satellite surveying. J. Geol. 1990, 22, 181–182. [Google Scholar]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Askne, J.; Nordius, H. Estimation of Tropospheric Delay for Mircowaves from Surface Weather Data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Ifadis, I.M. Space to earth techniques: Some considerations on the zenith wet path delay parameters. Surv. Rev. 1993, 32, 130–144. [Google Scholar] [CrossRef]
- Tregoning, P.; Herring, T.A. Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith total delays. Geophys. Res. Lett. 2006, 33, 33. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Geophys. Monogr. Ser. 1972, 15, 247–251. [Google Scholar]
- Hopfield, H.S. Tropospheric effect on electromagnetically measured range: Prediction from surface weather data. Radio Sci. 1971, 6, 357–367. [Google Scholar] [CrossRef]
- Leandro, R.F.; Langley, R.B.; Santos, M.C. UNB3m_pack: A neutral atmosphere delay package for radiometric space techniques. GPS Solut. 2008, 12, 65–70. [Google Scholar] [CrossRef]
- Schüler, T. The TropGrid2 standard tropospheric correction model. GPS Solut. 2014, 18, 123–131. [Google Scholar] [CrossRef]
- Böhm, J.; Heinkelmann, R.; Schuh, H. Short note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in then troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, C.; Shi, J.; Cao, N.; Zhang, B.; Yang, J. ITG: A new global GNSS tropospheric correction model. Sci. Rep. 2015, 5, 10273. [Google Scholar] [CrossRef] [PubMed]
- Lagler, K.; Schindelegger, M.; Böhm, J.; Krásná, H.; Nilsson, T. GPT2: Empirical slant delay model for radio space geodetic techniques. Geophys. Res. Lett. 2013, 40, 1069–1073. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef] [PubMed]
- Zhou, C.; Peng, B.; Li, W.; Zhong, S.; Ou, J.; Chen, R.; Zhao, X. Establishment of a Site-Specific Tropospheric Model Based on Ground Meteorological Parameters over the China Region. Sensors 2017, 17, 1722. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Hu, Y.; Yu, C.; Zhang, B.; Guo, J. An improved global zenith tropospheric delay model GZTD2 considering diurnal variations. Nonlinear Process. Geophys. 2016, 23, 127–136. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Yuan, Y.; Ou, J.; Chai, Y.; Li, Z.; Liou, Y.; Wang, N. New versions of the BDS/GNSS zenith tropospheric delay model IGGtrop. J. Geod. 2015, 89, 73–80. [Google Scholar] [CrossRef]
- Li, W.; Yuan, Y.; Ou, J.; He, Y. IGGtrop_SH and IGGtrop_rH: Two Improved Empirical Tropospheric Delay Models Based on Vertical Reduction Functions. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5276–5288. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.A.; Anthes, R.A.; Rocken, C.; Ware, R.H. GPS meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. Clim. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Yao, Y.; Zhu, S.; Yue, S. A globally applicable, season-specific model for estimating the weighted mean temperature of the atmosphere. J. Geod. 2012, 86, 1125–1135. [Google Scholar] [CrossRef]
- Chen, P.; Yao, W.; Zhu, X. Realization of global empirical model for mapping zenith wet delays onto precipitable water using NCEP re-analysis data. Geophys. J. Int. 2014, 198, 1748–1757. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Wu, S.; Wang, X.; Hu, A.; Wang, Q.; Zhang, K. A new voxel-based model for the determination of atmospheric weighted mean temperature in GPS atmospheric sounding. Atmos. Meas. Tech. 2017, 10, 2045–2060. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Yuan, Y.; Li, W.; Ou, J.; Li, Y.; Zhang, B. GPS PPP derived precipitable water vapor retrieval based on Tm/Ps from multiple sources of meteorological data sets in China. J. Geophys. Res. Atmos. 2017, 122, 4165–4183. [Google Scholar] [CrossRef]
- Ding, M. A neural network model for predicting weighted mean temperature. J. Geod. 2018, 92, 1187–1198. [Google Scholar] [CrossRef]
- Yao, Y.; Sun, Z.; Xu, C.; Xu, X.; Kong, J. Extending a model for water vapor sounding by ground-based GNSS in the vertical direction. J. Atmos. Sol. Terr. Phys. 2018, 179, 358–366. [Google Scholar] [CrossRef]
- Huang, L.; Jiang, W.; Liu, L.; Chen, H.; Ye, S. A new global grid model for the determination of atmospheric weighted mean temperature in GPS precipitable water vapor. J. Geod. 2018, 93, 159–176. [Google Scholar] [CrossRef]
- Huang, L.; Liu, L.; Chen, H.; Jiang, W. An improved atmospheric weighted mean temperature model and its impact on GNSS precipitable water vapor estimates for China. GPS Solut. 2019, 23, 51. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Fan, S.; Cheng, Y. Water vapor weighted mean temperature and its impact on the determination of precipitable water vapor and its linear trend. J. Geophys. Res. Atmos. 2016, 121, 833–852. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. Global water vapor variability and trend from the latest 36 year (1979 to 2014) data of ECMWF and NCEP reanalyses, radiosonde, GPS, and microwave satellite. J. Geophys. Res. Atmos. 2016, 121, 11–442. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Li, Z.; Cheng, Y.; Li, L.; Yuan, H. The correlation between GNSS-derived precipitable water vapor and sea surface temperature and its responses to El Niño–Southern Oscillation. Remote Sens. Environ. 2018, 216, 1–12. [Google Scholar] [CrossRef]
- Simmons, A.; Uppala, D.; Kobayashi, S. ERA-Interim: New ECMWF reanalysis products from 1989 onwards. ECMWF Newsl. 2007, 110, 25–35. [Google Scholar]
- Dee, D.; Uppala, S.; Simmons, A.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.; Balsamo, G.; Bauer, P. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. A comprehensive evaluation and analysis of the performance of multiple tropospheric models in China region. IEEE Trans. Geosci. Remote Sens. 2015, 54, 663–678. [Google Scholar] [CrossRef]
- Rüeger, J.M. Refractive Index Formulae for Radio Waves. JS28 Integration of Techniques and Corrections to Achieve Accurate Engineering; FIG XXII International Congress: Washington, DC, USA, 2002. [Google Scholar]
- Dousa, J.; Elias, M. An improved model for calculating tropospheric wet delay. Geophys. Res. Lett. 2014, 41, 4389–4397. [Google Scholar] [CrossRef]
- Yao, Y.; Sun, Z.; Xu, C. Establishment and Evaluation of a New Meteorological Observation-Based Grid Model for Estimating Zenith Wet Delay in Ground-Based Global Navigation Satellite System (GNSS). Remote Sens. 2018, 10, 1718. [Google Scholar] [CrossRef]
- Yao, Y.; Sun, Z.; Xu, C.; Zhang, L.; Wan, Y. Development and Assessment of the Atmospheric Pressure Vertical Correction Model with ERA Interim and Radiosonde Data. Earth Space Sci. 2018, 5, 777–789. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, B.; Xu, C.; Yan, F. Improved one/multi-parameter models that consider seasonal and geographic variations for estimating weighted mean temperature in ground-based GPS meteorology. J. Geod. 2014, 88, 273–282. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitude | Latitude | Tropospheric Parameter | Linear Trend | Correlation Coefficient | p Value |
|---|---|---|---|---|---|
| 115°E | 0°N | ZHD | −0.03 ± 0.02 mm/year | 0.15 | 0.01 |
| 115°E | 0°N | ZWD | 0.70 ± 0.20 mm/year | 0.52 | 2 × 10−7 |
| 115°E | 0°N | Tm | −0.01 ± 0.01 K/year | 0.08 | 0.08 |
| 115°E | 30°N | ZHD | −0.03 ± 0.02 mm/year | 0.25 | 1 × 10−3 |
| 115°E | 30°N | ZWD | −0.05 ± 0.17 mm/year | 0.01 | 0.51 |
| 115°E | 30°N | Tm | 0.03 ± 0.01 K/year | 0.49 | 7 × 10−7 |
| 115°E | 60°N | ZHD | 0.01 ± 0.04 mm/year | 0.01 | 0.60 |
| 115°E | 60°N | ZWD | 0.08 ± 0.09 mm/year | 0.08 | 0.06 |
| 115°E | 60°N | Tm | 0.03 ± 0.02 K/year | 0.23 | 2 × 10−3 |
| 115°E | 90°N | ZHD | −0.08 ± 0.15 mm/year | 0.03 | 0.28 |
| 115°E | 90°N | ZWD | 0.14 ± 0.04 mm/year | 0.49 | 6 × 10−7 |
| 115°E | 90°N | Tm | 0.07 ± 0.02 K/year | 0.57 | 2 × 10−8 |
| Fit Name | ZHD RMS (mm) | ZWD RMS (mm) | ||||||
|---|---|---|---|---|---|---|---|---|
| 0°N 115°E | 30°N 115°E | 60°N 115°E | 90°N 115°E | 0°N 115°E | 30°N 115°E | 60°N 115°E | 90°N 115°E | |
| Fit with Equation (5) | 17.1 | 15.3 | 19.3 | 15.6 | 9.7 | 10.0 | 14.0 | 2.8 |
| Fit with Equation (6) | 1.6 | 3.6 | 0.7 | 3.6 | 6.2 | 5.4 | 1.2 | 1.5 |
| Validation Data | Model | ZHD | ZWD | Tm | |||
|---|---|---|---|---|---|---|---|
| Bias (mm) | RMS (mm) | Bias (mm) | RMS (mm) | Bias (K) | RMS (K) | ||
| ECMWF Data | GPT2w | 5.8 [−4.0, 29.3] | 10.8 [1.7, 43.2] | 0.4 [−32.2, 90.3] | 10.5 [1.3, 151.2] | 4.8 [−6.9, 8.3] | 7.0 [3.7, 11.1] |
| GTrop | 1.0 [−6.9, 8.9] | 6.5 [0.8, 16.3] | 1.3 [−30.8, 23.3] | 9.6 [0.4, 41.9] | −0.1 [−2.5, 3.3] | 1.5 [0.1, 4.2] | |
| Radiosonde Data | GPT2w | 2.0 [−8.2, 29.3] | 13.5 [4.4, 38.4] | −2.3 [−40.6, 24.2] | 33.5 [6.1, 120.6] | 5.4 [−0.7, 11.8] | 8.5 [3.9, 14.7] |
| GTrop | −0.9 [−15.2, 25.9] | 12.3 [2.2, 39.7] | −0.4 [−30.5, 24.5] | 33.1 [6.0, 120.2] | 0.2 [−2.8, 3.5] | 4.0 [1.3, 6.9] | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Zhang, B.; Yao, Y. A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017. Remote Sens. 2019, 11, 1893. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11161893
Sun Z, Zhang B, Yao Y. A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017. Remote Sensing. 2019; 11(16):1893. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11161893
Chicago/Turabian StyleSun, Zhangyu, Bao Zhang, and Yibin Yao. 2019. "A Global Model for Estimating Tropospheric Delay and Weighted Mean Temperature Developed with Atmospheric Reanalysis Data from 1979 to 2017" Remote Sensing 11, no. 16: 1893. https://0-doi-org.brum.beds.ac.uk/10.3390/rs11161893