Assessing the Operation Parameters of a Low-altitude UAV for the Collection of NDVI Values Over a Paddy Rice Field

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
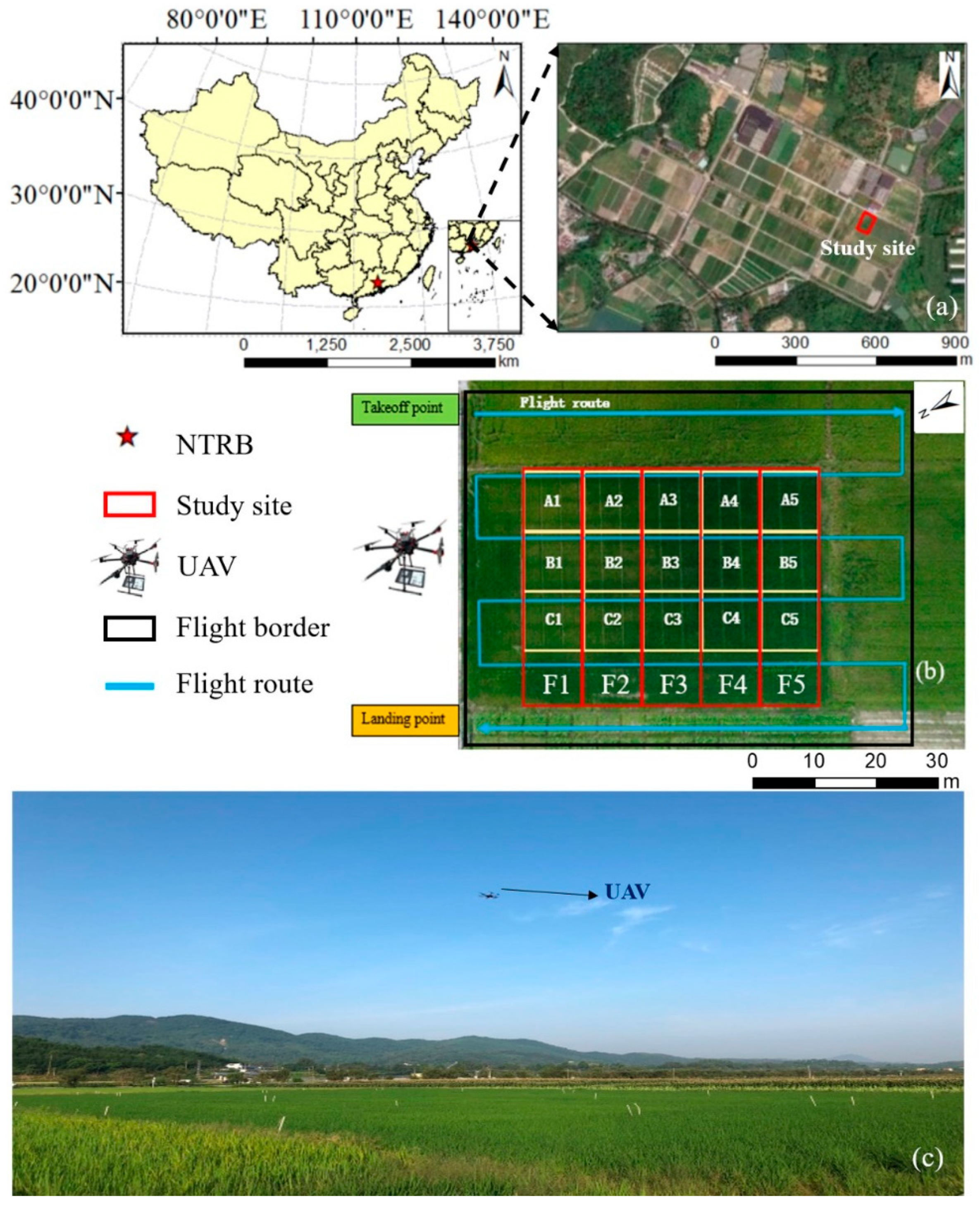
2.1. Study Site
2.2. UAV Data Collection
2.3. Ground Data Collection
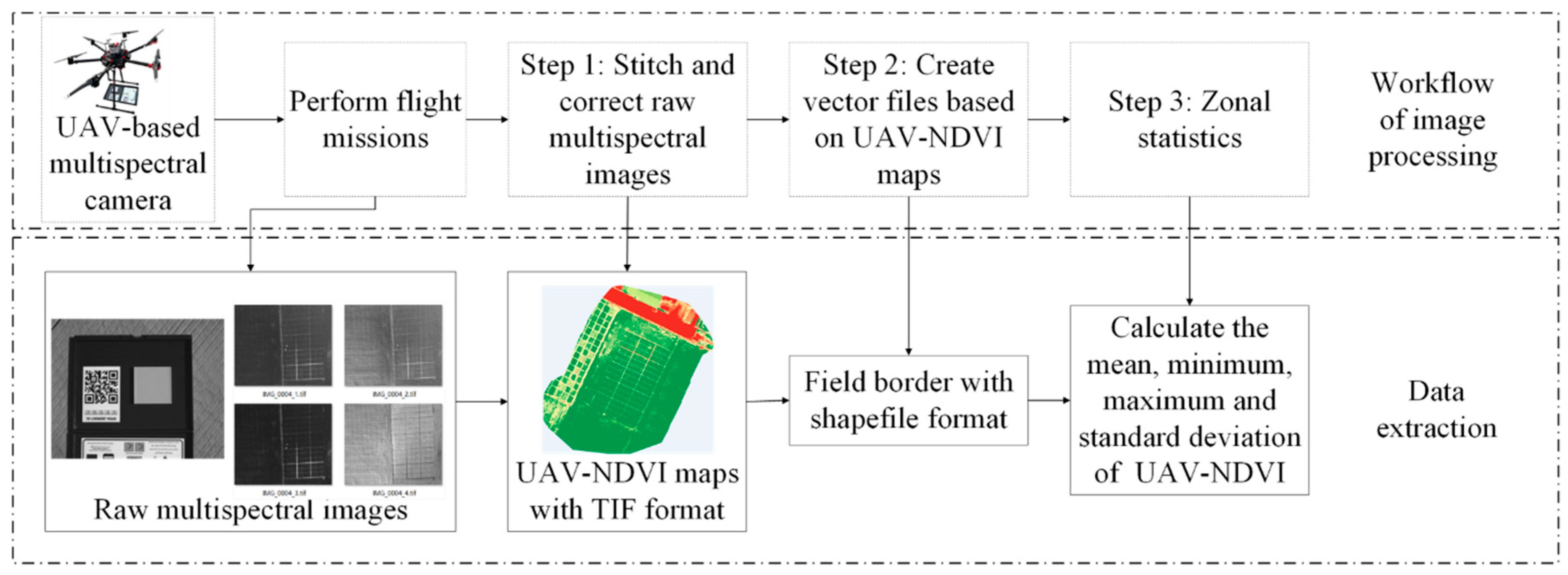
2.4. Data Processing and Analysis
3. Results
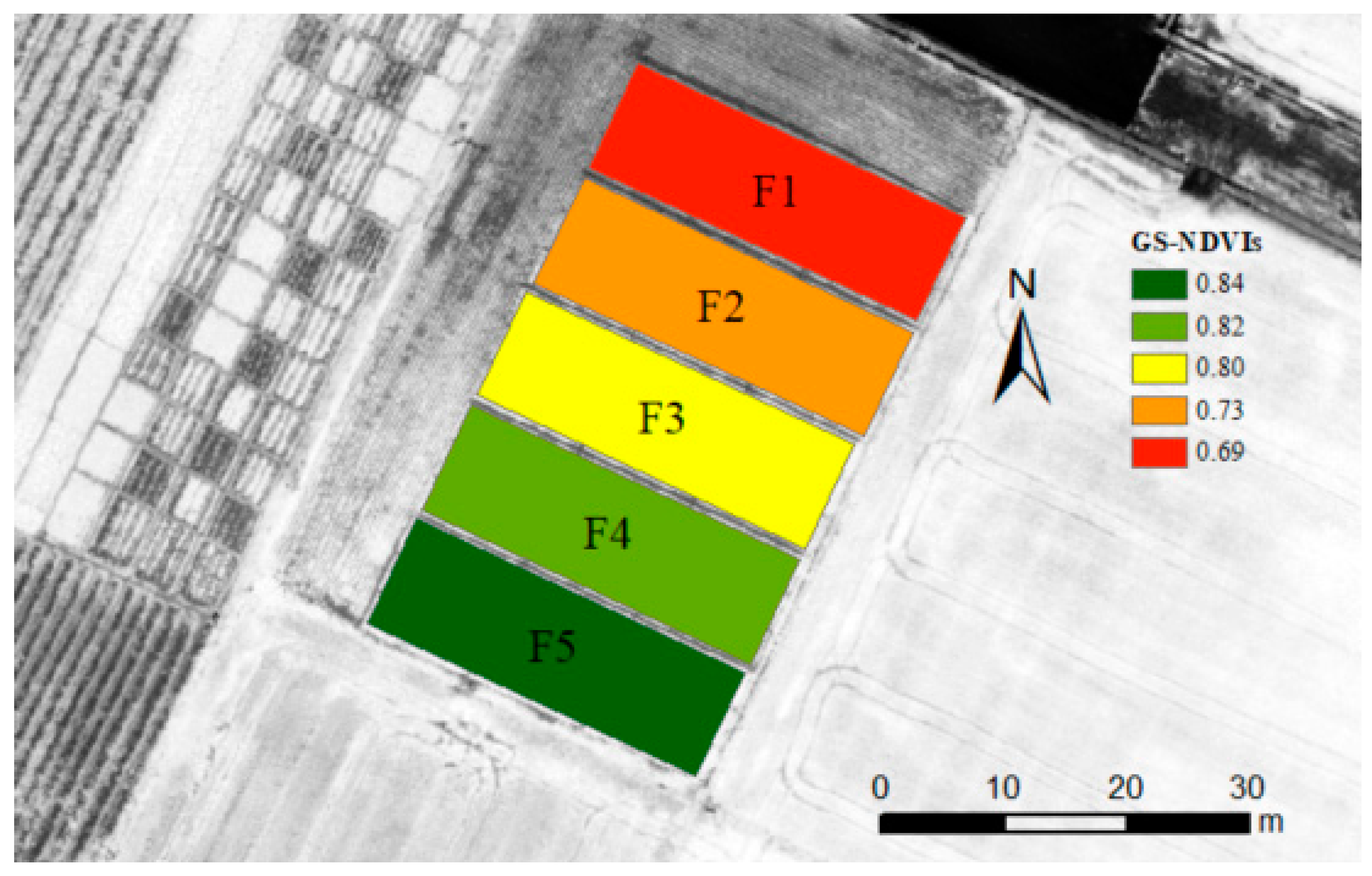
3.1. The Rice Growth Levels Determined by the GS–NDVIs
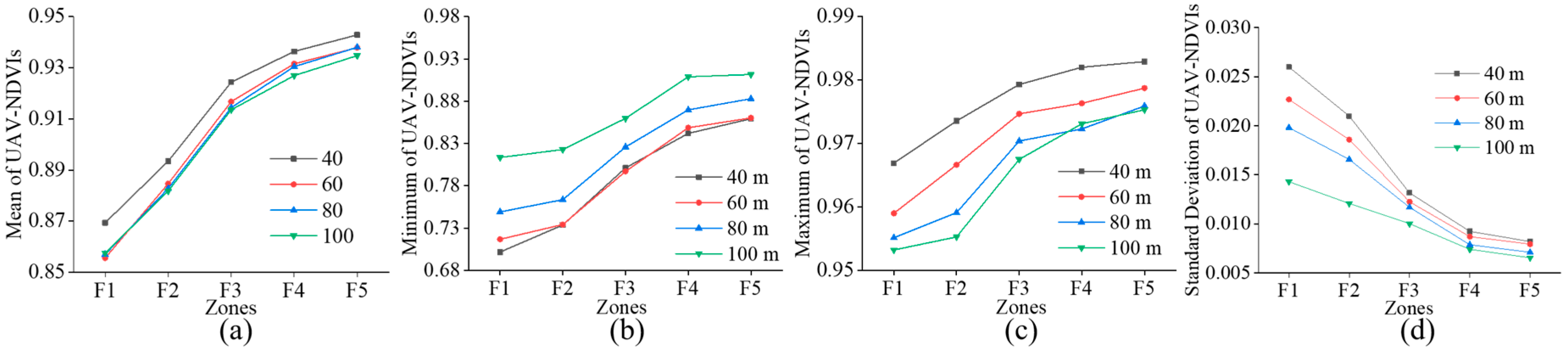
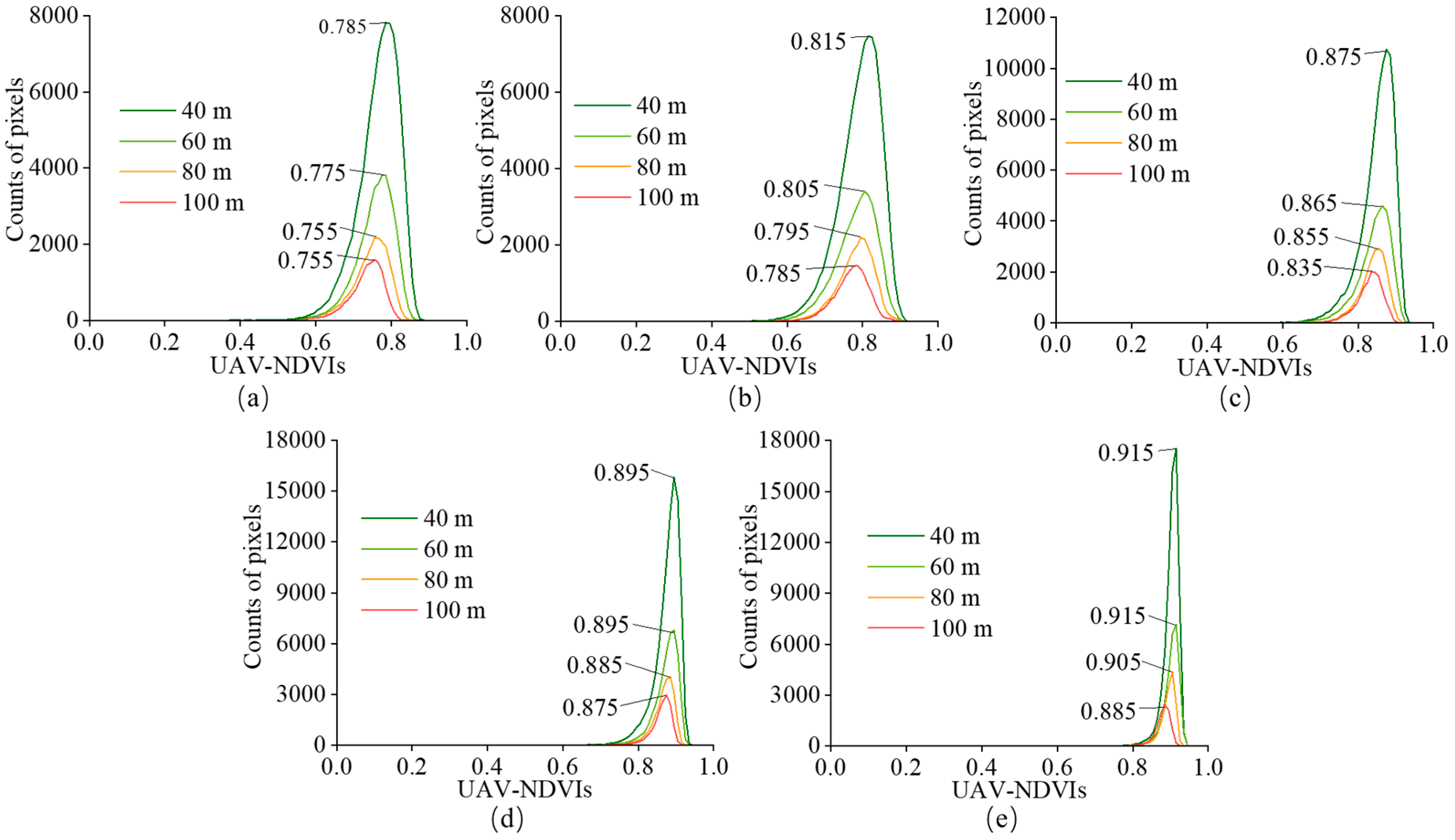
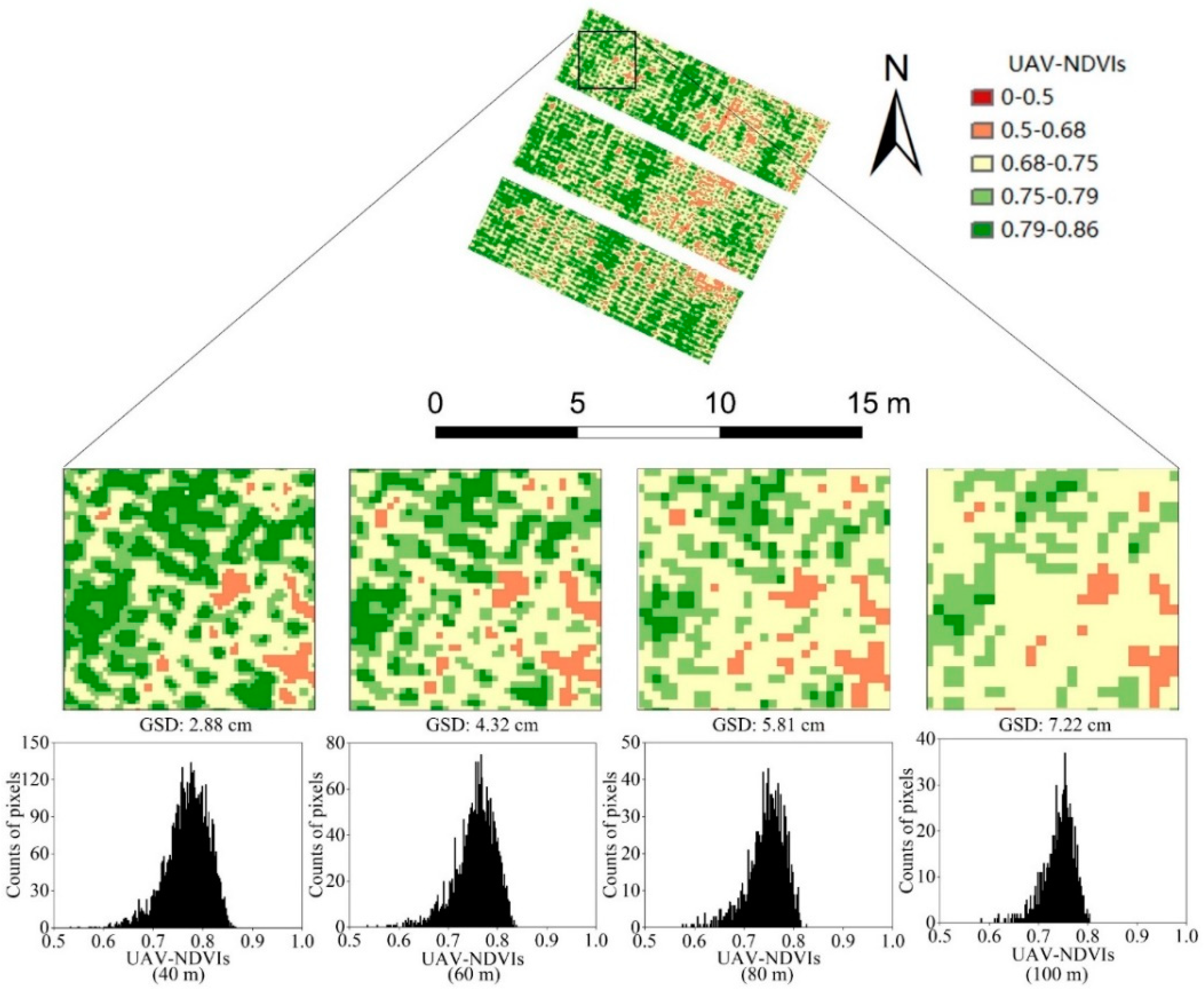
3.2. Effects of the Flight Altitude (FA) on the NDVI Values
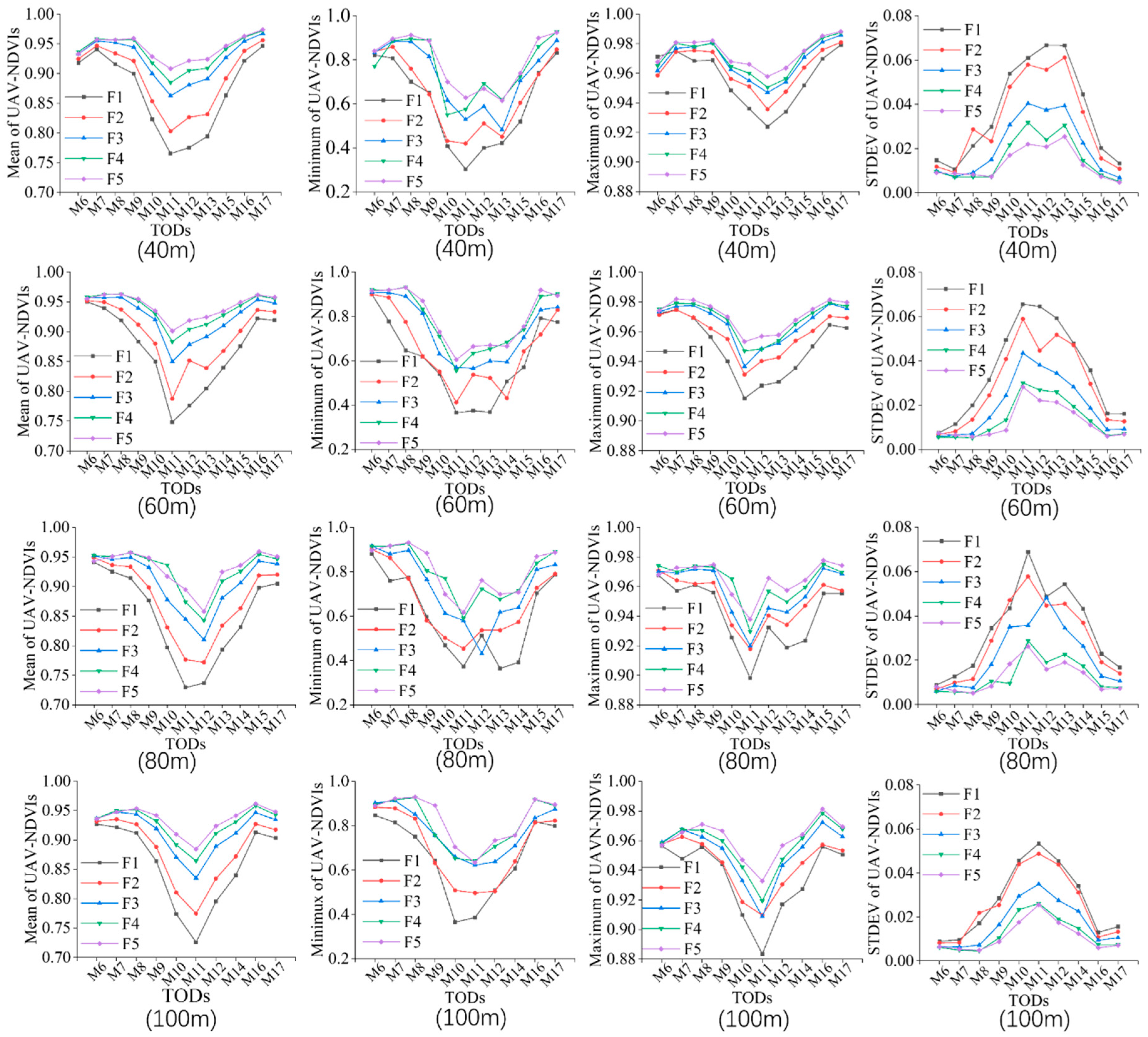
3.3. Effects of the Time of Day (TOD) on the NDVI Values
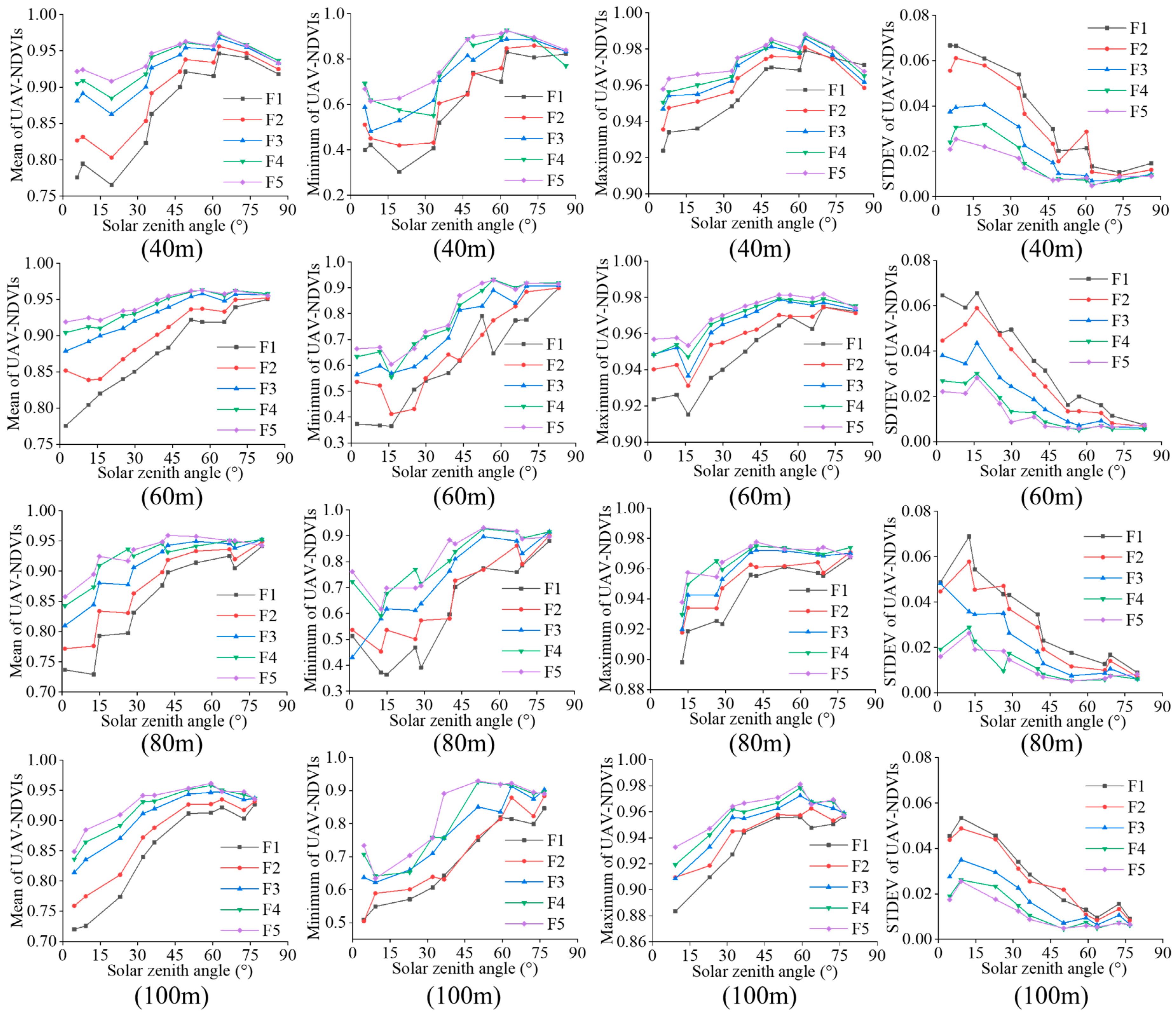
3.4. Dependence of the UAV–NDVIs on the Solar Zenith Angle (SZA)
3.5. Effects of the Growth Levels of Rice on the UAV–NDVIs
3.6. Relative Importance of Different Impactors: FAs, SZAs/TODs, Growth Levels
4. Discussion
4.1. Sensitivity of UAV–NDVIs to the Flight Altitude (FA)
4.2. Influence of the time of Day (TOD) and Solar Zenith Angle (SZA) on the UAV–NDVIs
4.3. Effect of the Growth Level on the UAV–NDVIs
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fields | Flight Altitude/m | Minimum of UAV–NDVIs | Maximum of UAV–NDVIs | Range |
|---|---|---|---|---|
| B1 | 40 | 0.38 | 0.88 | 0.50 |
| 60 | 0.48 | 0.88 | 0.40 | |
| 80 | 0.49 | 0.86 | 0.37 | |
| 100 | 0.52 | 0.84 | 0.32 | |
| B2 | 40 | 0.43 | 0.92 | 0.49 |
| 60 | 0.44 | 0.91 | 0.47 | |
| 80 | 0.46 | 0.91 | 0.45 | |
| 100 | 0.50 | 0.90 | 0.40 | |
| B3 | 40 | 0.53 | 0.94 | 0.41 |
| 60 | 0.57 | 0.93 | 0.36 | |
| 80 | 0.61 | 0.92 | 0.31 | |
| 100 | 0.65 | 0.90 | 0.25 | |
| B4 | 40 | 0.59 | 0.94 | 0.35 |
| 60 | 0.62 | 0.93 | 0.31 | |
| 80 | 0.68 | 0.92 | 0.24 | |
| 100 | 0.71 | 0.91 | 0.20 | |
| B5 | 40 | 0.74 | 0.94 | 0.20 |
| 60 | 0.77 | 0.94 | 0.17 | |
| 80 | 0.77 | 0.93 | 0.16 | |
| 100 | 0.78 | 0.92 | 0.14 |
References
- Aruva, S.; Sayantani, D.; Vijayalakshmi, S.; Moses, J.A.; Anandharamakrishnan, C. Ageing of rice: A review. J. Cereal Sci. 2018, 81, 161–170. [Google Scholar]
- Zhang, X.; Liu, Y.; Liu, Y.; Cui, Q.; Yang, L.; Hu, X.; Guo, J.; Zhang, J.; Yang, S.; Abou-Amer, I. Impacts of climate change on self-sufficiency of rice in China: A CGE-model-based evidence with alternative regional feedback mechanisms. J. Clean. Prod. 2019, 230, 150–161. [Google Scholar] [CrossRef]
- Sharma, S.; Rout, K.K.; Khanda, C.M.; Tripathi, R.; Shahid, M.; Nayak, A.; Satpathy, S.; Banik, N.C.; Iftikar, W.; Parida, N.; et al. Field-specific nutrient management using Rice Crop Manager’ decision support tool in Odisha, India. Field Crop. Res. 2019, 241, 107578. [Google Scholar] [CrossRef] [PubMed]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Agueera Vega, F.; Carvajal Ramirez, F.; Perez Saiz, M.; Orgaz Rosua, F. Multi-temporal imaging using an unmanned aerial vehicle for monitoring a sunflower crop. Biosyst. Eng. 2015, 132, 19–27. [Google Scholar] [CrossRef]
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agr. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Dunn, B.W.; Robson, A.J.; Dunn, T.S.; Dehaan, R.L. Modeling mid-season rice nitrogen uptake using multispectral satellite data. Remote Sens. 2019, 11, 1837. [Google Scholar] [CrossRef] [Green Version]
- Nutini, F.; Confalonieri, R.; Crema, A.; Movedi, E.; Paleari, L.; Stavrakoudis, D.; Boschetti, M. An operational workflow to assess rice nutritional status based on satellite imagery and smartphone apps. Comput. Electron. Agr. 2018, 154, 80–92. [Google Scholar] [CrossRef]
- Fan, X.; Liu, Y. A global study of NDVI difference among moderate-resolution satellite sensors. ISPRS J. Photogramm. 2016, 121, 177–191. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Huang, W.; Niu, Z.; Wang, C.; Li, W.; Yu, B. Validation of synthetic daily Landsat NDVI time series data generated by the improved spatial and temporal data fusion approach. Inform. Fusion. 2018, 40, 34–44. [Google Scholar] [CrossRef]
- Ali, A.M.; Abou-Amer, I.; Ibrahim, S.M. Using GreenSeeker active optical sensor for optimizing maize nitrogen fertilization in calcareous soils of Egypt. Arch. Agron. Soil Sci. 2018, 64, 1083–1093. [Google Scholar] [CrossRef]
- Barker, D.W.; Sawyer, J.E. Using active canopy sensors to quantify corn nitrogen stress and nitrogen application rate. Agron. J. 2010, 102, 964–971. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Yao, X.; Deng, X.; Tian, Y.; Cao, W.; Zhu, Y. Detection of rice phenology through time series analysis of ground-based spectral index data. Field Crop. Res. 2016, 198, 131–139. [Google Scholar] [CrossRef]
- Ostos-Garrido, F.J.; de Castro, A.I.; Torres-Sanchez, J.; Piston, F.; Pena, J.M. High-throughput phenotyping of bioethanol potential in cereals using UAV-based multi-spectral imagery. Front. Plant Sci. 2019, 10, 948. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, N.R.; et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: A review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remoe Sensing. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Yu, N.; Li, L.; Schmitz, N.; Tian, L.F.; Greenberg, J.A.; Diers, B.W. Development of methods to improve soybean yield estimation and predict plant maturity with an unmanned aerial vehicle based platform. Remote Sens. Environ. 2016, 187, 91–101. [Google Scholar] [CrossRef]
- Duan, T.; Chapman, S.C.; Guo, Y.; Zheng, B. Dynamic monitoring of NDVI in wheat agronomy and breeding trials using an unmanned aerial vehicle. Field Crop. Res. 2017, 210, 71–80. [Google Scholar] [CrossRef]
- Liu, T.; Li, R.; Zhong, X.; Jiang, M.; Jin, X.; Zhou, P.; Liu, S.; Sun, C.; Guo, W. Estimates of rice lodging using indices derived from UAV visible and thermal infrared images. Agr. Forest Meteorol. 2018, 252, 144–154. [Google Scholar] [CrossRef]
- Reza, M.N.; Na, I.S.; Baek, S.W.; Lee, K. Rice yield estimation based on K-means clustering with graph-cut segmentation using low-altitude UAV images. Biosyst. Eng. 2019, 177, 109–121. [Google Scholar] [CrossRef]
- Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting grain yield in rice using multi-temporal vegetation indices from UAV-based multispectral and digital imagery. ISPRS J. Photogramm. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Guan, S.; Fukami, K.; Matsunaka, H.; Okami, M.; Tanaka, R.; Nakano, H.; Sakai, T.; Nakano, K.; Ohdan, H.; Takahashi, K. Assessing Correlation of High-Resolution NDVI with fertilizer application level and yield of rice and wheat crops using small UAVs. Remote Sens. 2019, 11, 112. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Al-Bakri, J.T.; Suleiman, A.S. NDVI response to rainfall in different ecological zones in Jordan. Int. J. Remote Sens. 2004, 25, 3897–3912. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef] [Green Version]
- Ishihara, M.; Inoue, Y.; Ono, K.; Shimizu, M.; Matsuura, S. The impact of sunlight conditions on the consistency of vegetation indices in croplands—Effective usage of vegetation indices from continuous ground-based spectral measurements. Remote Sens. 2015, 7, 14079–14098. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.M.; Lamb, D.W.; Samborski, S.M. Reducing the influence of solar illumination angle when using active optical sensor derived NDVIAOS to infer fAPAR for spring wheat (Triticum aestivum L.). Comput. Electron. Agr. 2019, 156, 1–9. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Dong, A. Measurement and modeling of Bidirectional Reflectance Distribution Function (BRDF) on material surface. Measurement 2013, 46, 3654–3661. [Google Scholar] [CrossRef]
- Bring, J. How to Standardize Regression Coefficients. Am. Stat. 1994, 48, 209–213. [Google Scholar]
- Stow, D.; Nichol, J.C.; Wade, T.; Assmann, J.J.; Simpson, G.; Helfter, C. Illumination geometry and flying height influence surface reflectance and NDVI derived from multispectral UAS imagery. Drones 2019, 3, 55. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, J. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Q.; Liu, X.; Liu, X.; Wang, Y. A physical-based atmospheric correction algorithm of unmanned aerial vehicles images and its utility analysis. Int. J. Remote Sens. 2017, 38, 3101–3112. [Google Scholar] [CrossRef]
- Easterday, K.; Kislik, C.; Dawson, T.E.; Hogan, S.; Kelly, M. Remotely sensed water limitation in vegetation: Insights from an experiment with Unmanned Aerial Vehicles (UAVs). Remote Sens. 2019, 11, 1853. [Google Scholar] [CrossRef] [Green Version]
- Mesas-Carrascosa, F.; Torres-Sanchez, J.; Clavero-Rumbao, I.; Garcia-Ferrer, A.; Pena, J.; Borra-Serrano, I.; Lopez-Granados, F. Assessing optimal flight parameters for generating accurate multispectral orthomosaicks by UAV to support site-specific crop management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef] [Green Version]
- Tu, Y.; Phinn, S.; Johansen, K.; Robson, A.; Wu, D. Optimising drone flight planning for measuring horticultural tree crop structure. ISPRS J. Photogramm. 2020, 160, 83–96. [Google Scholar] [CrossRef] [Green Version]
- Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P.; Abou-Amer, I.P. Comparison of Satellite and UAV-based multispectral imagery for vineyard variability assessment. Remote Sens. Environ. 2019, 11, 436. [Google Scholar] [CrossRef] [Green Version]
- Wei, S.; Fang, H. Estimation of canopy clumping index from MISR and MODIS sensors using the normalized difference hotspot and darkspot (NDHD) method: The influence of BRDF models and solar zenith angle. Remote Sens. Environ. 2016, 187, 476–491. [Google Scholar] [CrossRef]
- Bréon, F.; Maignan, F.; Leroy, M.; Grant, I. Analysis of hot spot directional signatures measured from space. J. Geophys. Res. Atmos. 2002, 107, 1–15. [Google Scholar] [CrossRef]
- Kuusk, A. The hot spot effect in plant canopy reflectance. In Photon-Vegetation Interactions: Applications in Optical Remote Sensing and Plant Ecology; Myneni, R.B., Ross, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 139–159. [Google Scholar]
- Stanton, C.; Starek, M.; Elliott, N.; Brewer, M.; Maeda, M.; Chu, T. Unmanned aircraft system-derived crop height and normalized difference vegetation index metrics for sorghum yield and aphid stress assessment. J. Appl. Remote Sens. 2017, 11, 26035. [Google Scholar] [CrossRef] [Green Version]








| Specification | Parameters |
|---|---|
| Weight | 170 g (including DLS) |
| Dimensions | 9.4 cm × 6.3 cm × 4.6 cm |
| Power | 4.2–15.8 V DC, 4 W nominal, 8 W peak |
| Spectral bands | Blue (475 nm, FWHM: 20 nm); green (560 nm, FWHM: 20 nm); red (668 nm, FWHM: 10 nm); red edge (717 nm, FWHM: 10 nm); NIR (840 nm, FWHM: 40 nm) |
| Maximum capture speed | 1 capture per second (all bands) |
| Storage format | 16 bits TIFF |
| Field of view (FOV) | 46° |
| Start Time of Each Hour (min) | Flight Altitude (m) | Image Overlap (%) | Speed (m·s−1) | Ground Sampling Distance (cm) |
|---|---|---|---|---|
| <15 | 40 | 80 | 5 | 2.88 |
| 15–30 | 60 | 4.32 | ||
| 30–45 | 80 | 5.81 | ||
| >45 | 100 | 7.22 |
| Impactors | F1 | F2 | F3 | F4 | F5 |
|---|---|---|---|---|---|
| FAs | 0.031 | 0.031 | 0.025 | 0.022 | 0.019 |
| TODs(h)/SZAs (°) | 0.200 | 0.168 | 0.122 | 0.100 | 0.085 |
| Impactors | Mean UAV–NDVIs | STDEV UAV–NDVIs |
|---|---|---|
| FAs | −0.148 ** | −0.089 ** |
| TODs(h)/SZAs (°) | 0.698 ** | −0.728 ** |
| Growth levels | 0.509 ** | −0.510 ** |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, R.; Wang, P.; Xu, Y.; Zhou, Z.; Luo, X.; Lan, Y.; Zhao, G.; Sanchez-Azofeifa, A.; Laakso, K. Assessing the Operation Parameters of a Low-altitude UAV for the Collection of NDVI Values Over a Paddy Rice Field. Remote Sens. 2020, 12, 1850. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111850
Jiang R, Wang P, Xu Y, Zhou Z, Luo X, Lan Y, Zhao G, Sanchez-Azofeifa A, Laakso K. Assessing the Operation Parameters of a Low-altitude UAV for the Collection of NDVI Values Over a Paddy Rice Field. Remote Sensing. 2020; 12(11):1850. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111850
Chicago/Turabian StyleJiang, Rui, Pei Wang, Yan Xu, Zhiyan Zhou, Xiwen Luo, Yubin Lan, Genping Zhao, Arturo Sanchez-Azofeifa, and Kati Laakso. 2020. "Assessing the Operation Parameters of a Low-altitude UAV for the Collection of NDVI Values Over a Paddy Rice Field" Remote Sensing 12, no. 11: 1850. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111850