Assessment of Native Radar Reflectivity and Radar Rainfall Estimates for Discharge Forecasting in Mountain Catchments with a Random Forest Model

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
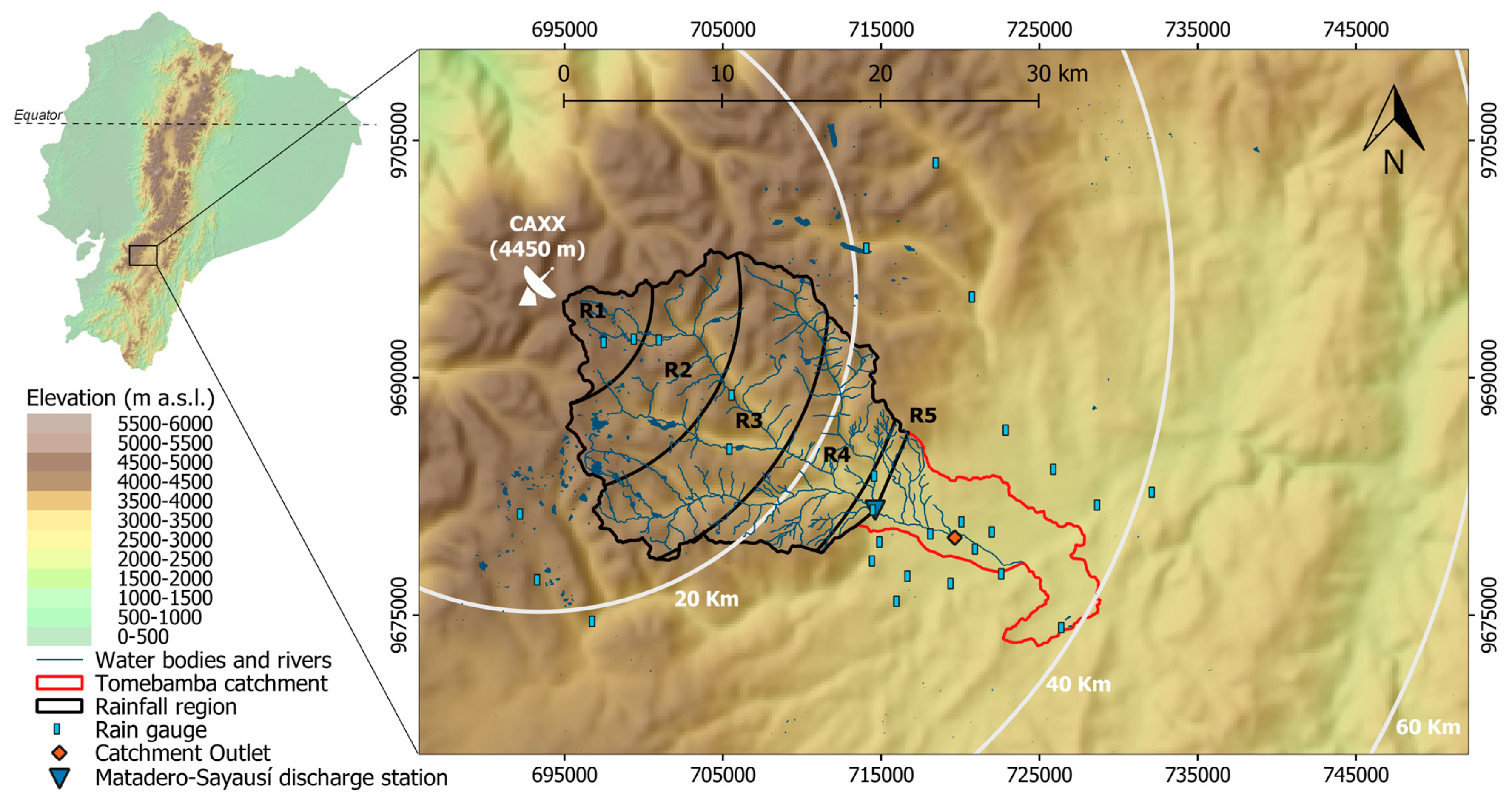
2.1. Study Site
2.2. Instruments and Data
2.2.1. Radar
2.2.2. Rain Gauges
2.2.3. Discharge
2.3. Methods
2.3.1. Random Forest Model for Discharge Forecasting
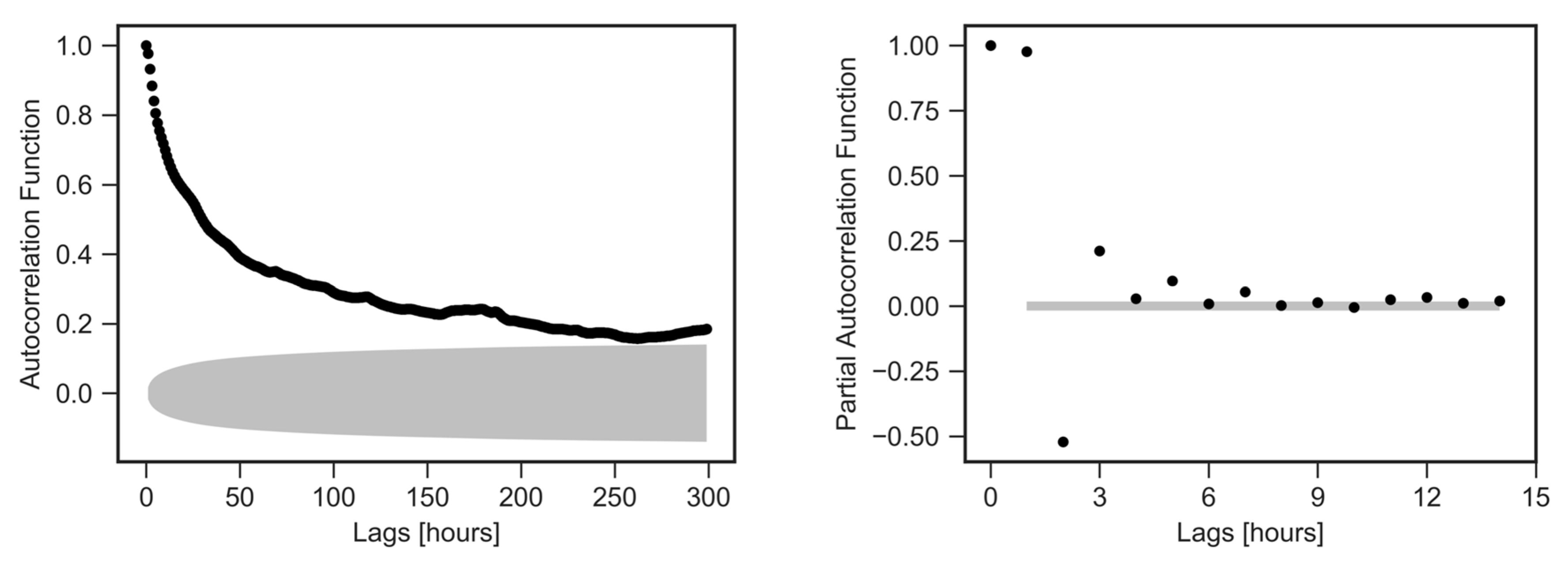
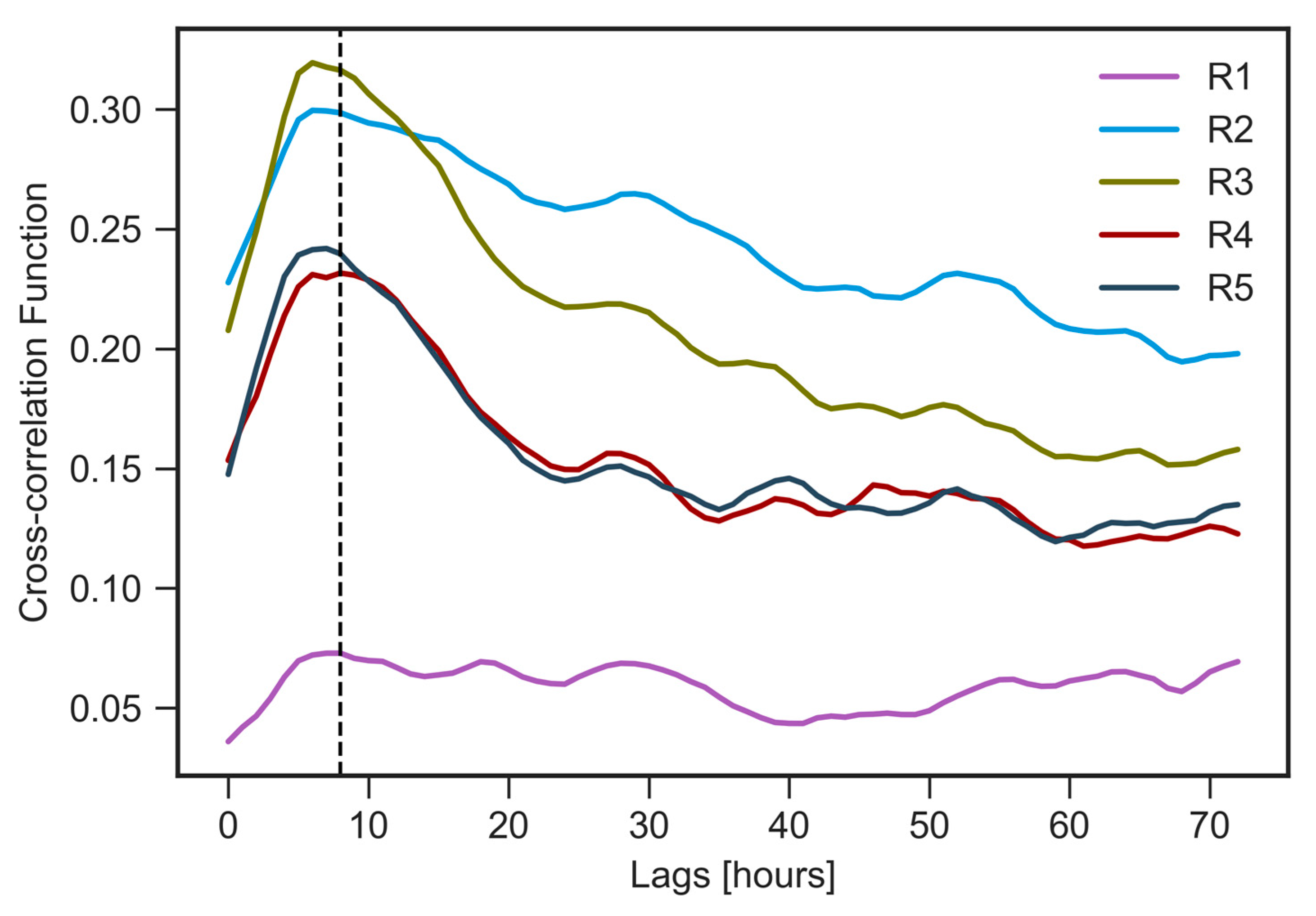
2.3.2. Input Data
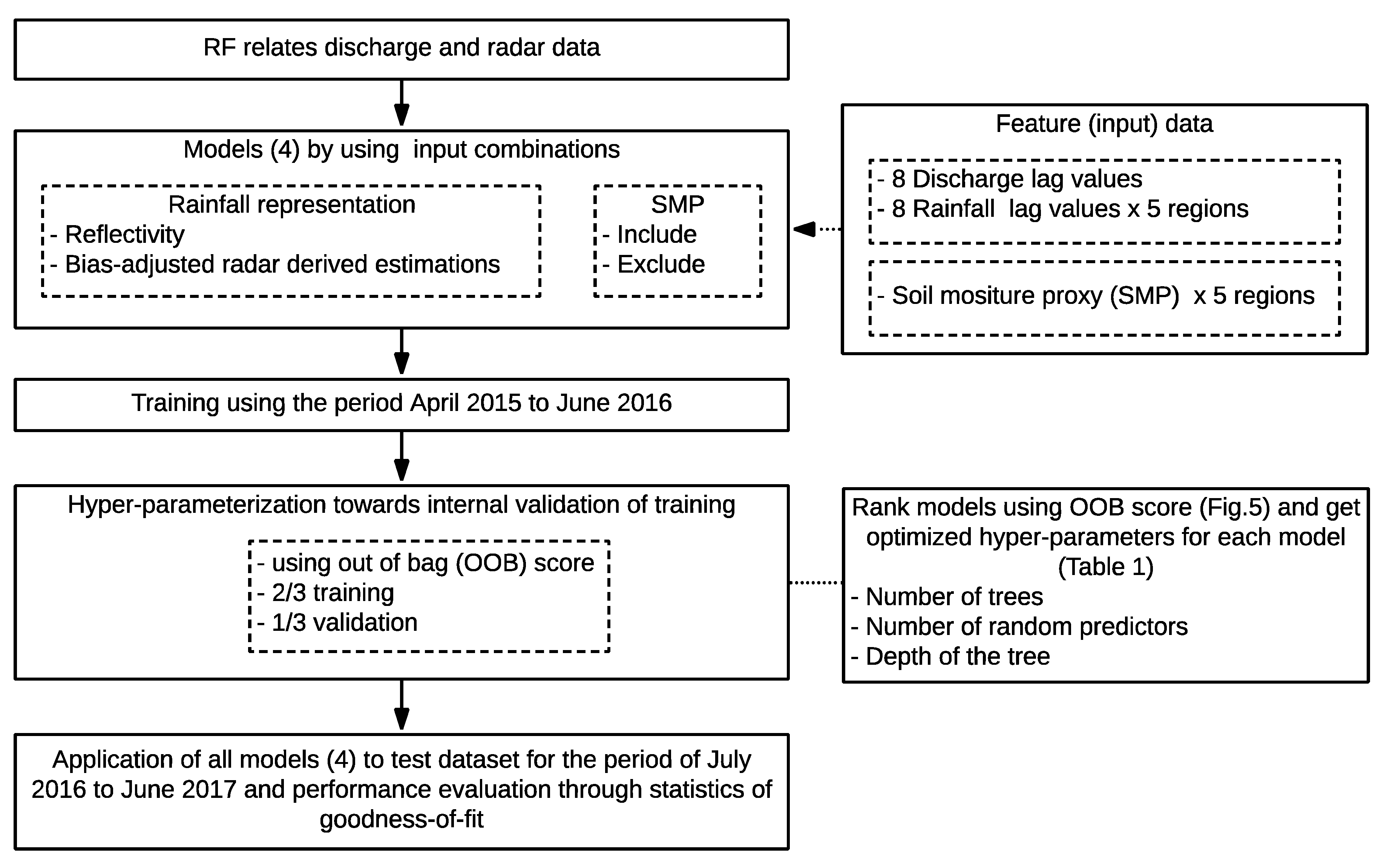
2.3.3. Input Data Configuration and Model Optimization
2.3.4. Performance Evaluation
3. Results and Discussion
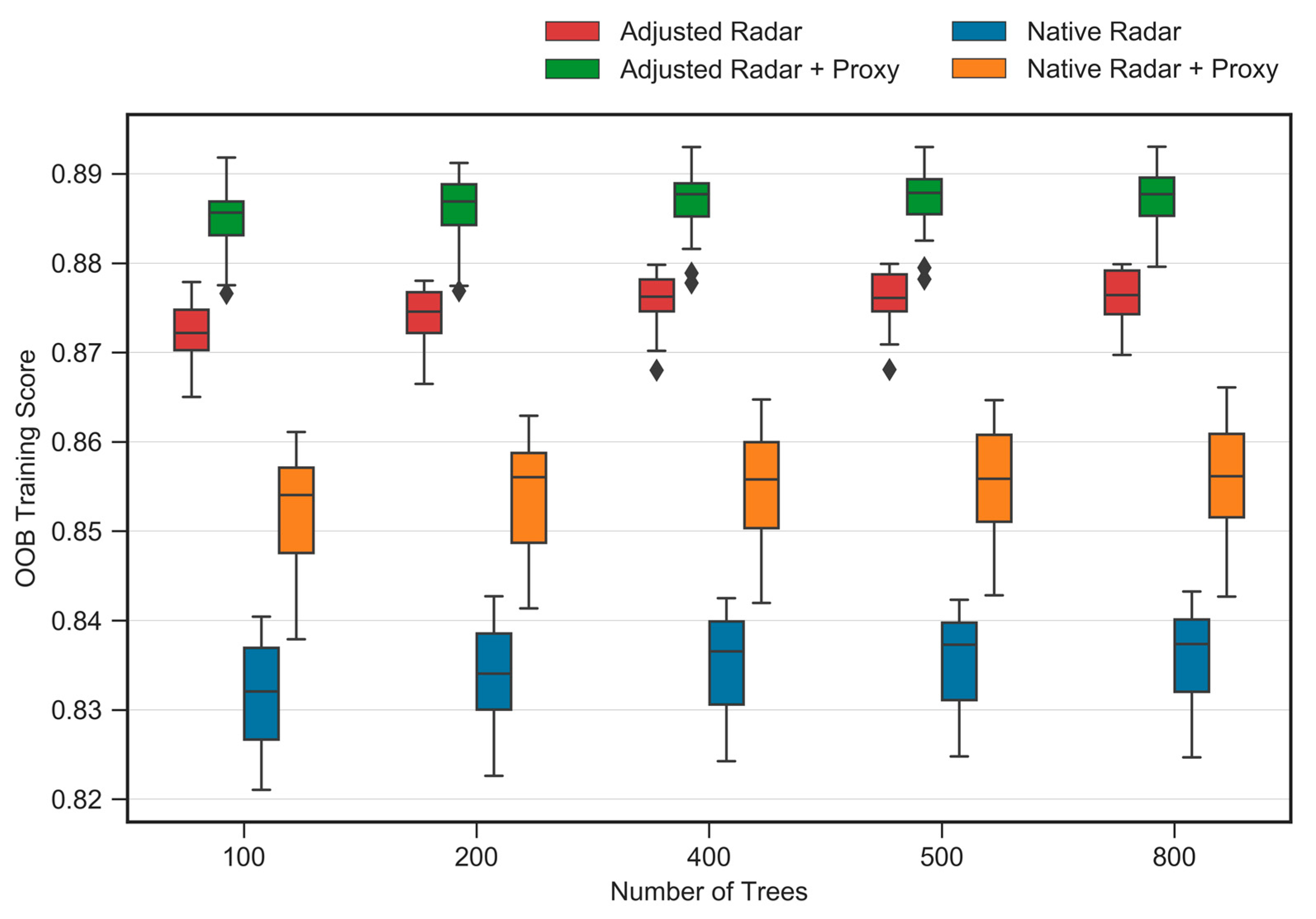
3.1. Feature Selection and Model Optimization
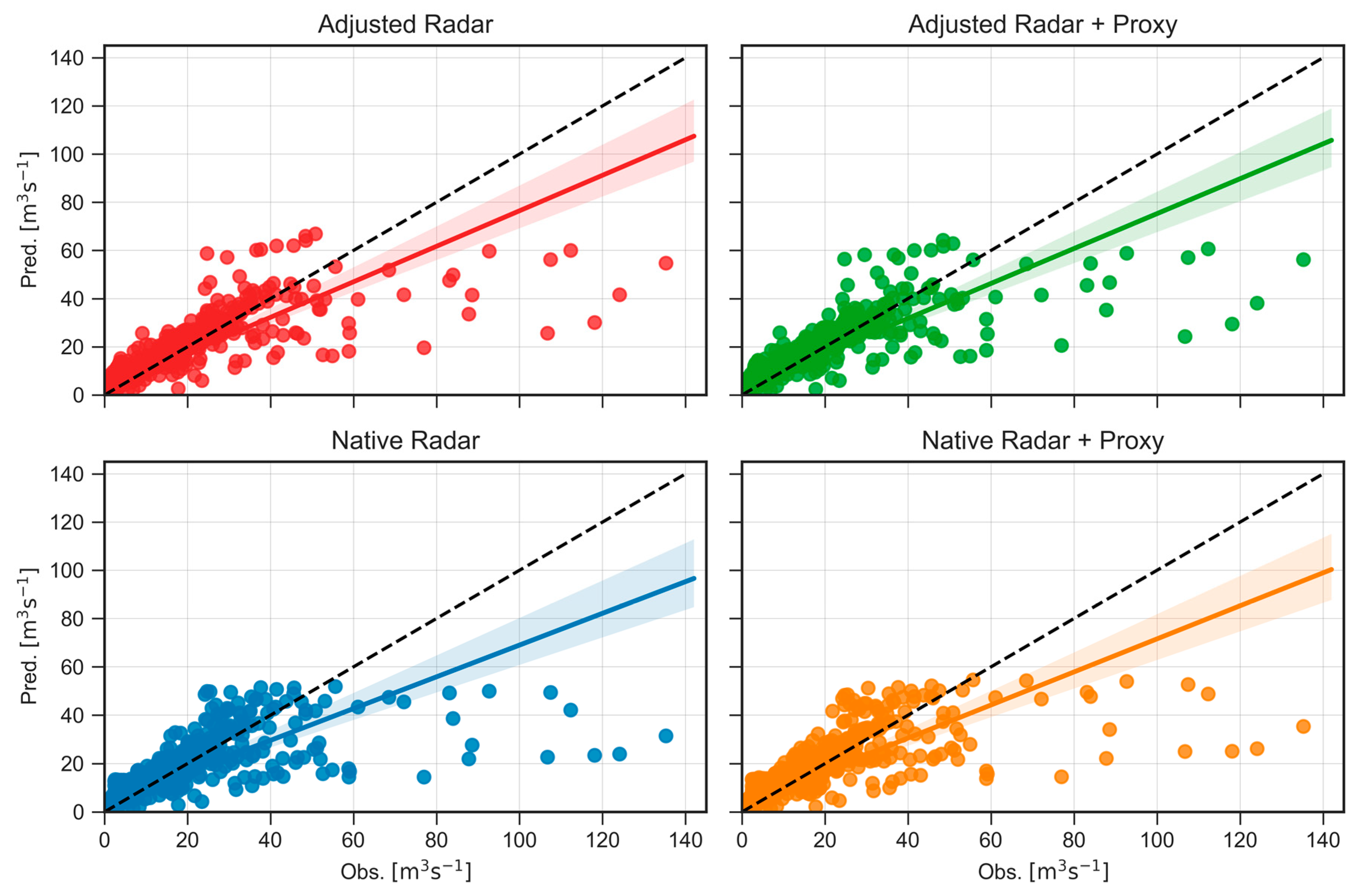
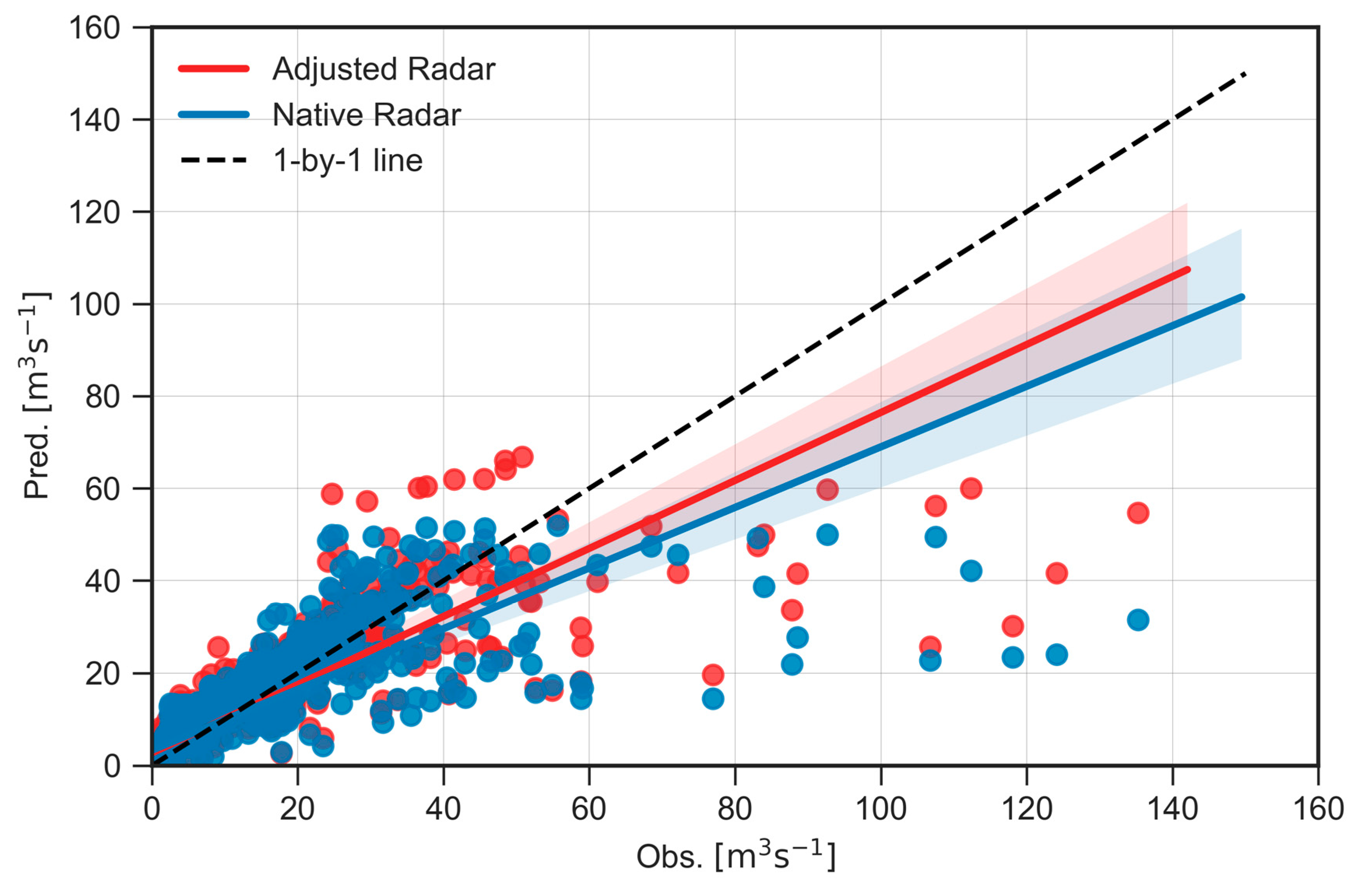
3.2. Performance Evaluation of Discharge Models with Test Data
3.3. Data Type Influence
3.4. Proxy of Soil Moisture Influence
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Paniconi, C.; Putti, M. Physically based modeling in catchment hydrology at 50: Survey and outlook. Water Resour. Res. 2015, 51, 2498–2514. [Google Scholar] [CrossRef] [Green Version]
- Yaseen, Z.M.; El-shafie, A.; Jaafar, O.; Afan, H.A.; Sayl, K.N. Artificial intelligence based models for stream-flow forecasting: 2000-2015. J. Hydrol. 2015, 530, 829–844. [Google Scholar] [CrossRef]
- Fatichi, S.; Vivoni, E.R.; Ogden, F.L.; Ivanov, V.Y.; Mirus, B.; Gochis, D.; Downer, C.W.; Camporese, M.; Davison, J.H.; Ebel, B.; et al. An overview of current applications, challenges, and future trends in distributed process-based models in hydrology. J. Hydrol. 2016, 537, 45–60. [Google Scholar] [CrossRef] [Green Version]
- Valizadeh, N.; Mirzaei, M.; Allawi, M.F.; Afan, H.A.; Mohd, N.S.; Hussain, A.; El-shafie, A. Artificial intelligence and geo-statistical models for stream-flow forecasting in ungauged stations: State of the art. Nat. Hazards 2017. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef] [Green Version]
- Heuvelink, D.; Berenguer, M.; Brauer, C.C.; Uijlenhoet, R. Hydrological application of radar rainfall nowcasting in the Netherlands. Environ. Int. 2020, 136, 105431. [Google Scholar] [CrossRef]
- Paz, I.; Tchiguirinskaia, I.; Schertzer, D. Rain gauge networks’ limitations and the implications to hydrological modelling highlighted with a X-band radar. J. Hydrol. 2020, 583, 124615. [Google Scholar] [CrossRef]
- Sucozhañay, A.; Célleri, R. Impact of Rain Gauges distribution on the runoff simulation of a small mountain catchment in Southern Ecuador. Water 2018, 10, 1169. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Grimaldi, S.; Walker, J.P.; Pauwels, V.R. Application of remote sensing data to constrain operational rainfall-driven flood forecasting: A review. Remote Sens. 2016, 8, 456. [Google Scholar] [CrossRef] [Green Version]
- Berne, A.; Krajewski, W.F. Advances in Water Resources Radar for hydrology: Unfulfilled promise or unrecognized potential? Adv. Water Resour. 2013, 51, 357–366. [Google Scholar] [CrossRef]
- Editorial Board. Hydrologic applications of weather radar. J. Hydrol. 2015, 531, 231–233. [Google Scholar] [CrossRef]
- Yoon, S.-S. Adaptive Blending Method of Radar-Based and Numerical Weather Prediction QPFs for Urban Flood Forecasting. Remote Sens. 2019, 11, 642. [Google Scholar] [CrossRef] [Green Version]
- Khaki, M.; Hoteit, I.; Kuhn, M.; Forootan, E.; Awange, J. Assessing data assimilation frameworks for using multi-mission satellite products in a hydrological context. Sci. Total Environ. 2019, 647, 1031–1043. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McKee, J.L.; Binns, A.D. A review of gauge–radar merging methods for quantitative precipitation estimation in hydrology. Can. Water Resour. J. 2016, 41, 186–203. [Google Scholar] [CrossRef]
- Abon, C.C.; Kneis, D.; Crisologo, I.; Bronstert, A.; Primo, C.; David, C.; Heistermann, M.; Cristobal, C.; Kneis, D.; Crisologo, I.; et al. Evaluating the potential of radar-based rainfall estimates for streamflow and flood simulations in the Philippines. Geomat. Nat. Hazards Risk 2016, 7, 1390–1405. [Google Scholar] [CrossRef]
- He, X.; Sonnenborg, T.O.; Refsgaard, J.C.; Vejen, F.; Jensen, K.H. Evaluation of the value of radar QPE data and rain gauge data for hydrological modeling. Water Resour. Res. 2013, 49, 5989–6005. [Google Scholar] [CrossRef]
- Keblouti, M.; Ouerdachi, L.; Berhail, S. The use of weather radar for rainfall-runoff modeling, case of Seybouse watershed (Algeria ). Arab. J. Geosci. 2013. [Google Scholar] [CrossRef]
- Hsu, S.Y.; Chen, T.B.; Du, W.C.; Wu, J.H.; Chen, S.C. Integrate Weather radar and monitoring devices for urban flooding surveillance. Sensors 2019, 19, 825. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhang, L.; Gippel, C.J.; Shan, L.; Chen, S.; Yang, W. Uncertainty of Flood Forecasting Based on Radar Rainfall Data Assimilation. Adv. Meteorol. 2016. [Google Scholar] [CrossRef] [Green Version]
- Emmanuel, I.; Andrieu, H.; Leblois, E.; Janey, N.; Payrastre, O. Influence of rainfall spatial variability on rainfall-runoff modelling: Benefit of a simulation approach? J. Hydrol. 2015. [Google Scholar] [CrossRef]
- Lobligeois, F.; Andréassian, V.; Perrin, C.; Tabary, P.; Loumagne, C. When does higher spatial resolution rainfall information improve streamflow simulation? An evaluation using 3620 flood events. Hydrol. Earth Syst. Sci. 2014, 18, 575–594. [Google Scholar] [CrossRef] [Green Version]
- Mejía-Veintimilla, D.; Ochoa-Cueva, P.; Samaniego-Rojas, N.; Félix, R.; Arteaga, J.; Crespo, P.; Oñate-Valdivieso, F.; Fries, A. River discharge simulation in the high andes of southern ecuador using high-resolution radar observations and meteorological station data. Remote Sens. 2019, 11, 2804. [Google Scholar] [CrossRef] [Green Version]
- Dinu, C.; Drobot, R.; Pricop, C.; Blidaru, T.V. Flash-Flood Modelling with Artificial Neural Networks using Radar Rainfall Estimates. Math. Model. Civ. Eng. 2017, 13, 10–20. [Google Scholar] [CrossRef] [Green Version]
- Dinu, C.; Drobot, R.; Pricop, C.; Blidaru, T.V. Genetic Programming Technique applied for Flash-Flood Modelling using Radar Rainfall Estimates. Math. Model. Civ. Eng. 2017, 13, 27–38. [Google Scholar] [CrossRef] [Green Version]
- Ragettli, S.; Zhou, J.; Wang, H.; Liu, C.; Guo, L. Modeling flash floods in ungauged mountain catchments of China: A decision tree learning approach for parameter regionalization. J. Hydrol. 2017, 555, 330–346. [Google Scholar] [CrossRef]
- Falck, A.S.; Maggioni, V.; Tomasella, J.; Diniz, F.L.; Mei, Y.; Beneti, C.A.; Herdies, D.L.; Neundorf, R.; Caram, R.O.; Rodriguez, D.A. Improving the use of ground-based radar rainfall data for monitoring and predicting floods in the Iguaçu river basin. J. Hydrol. 2018, 567, 626–636. [Google Scholar] [CrossRef]
- Ogale, S.; Srivastava, S. Modelling and short term forecasting of flash floods in an urban environment. In Proceedings of the 2019 National Conference on Communications (NCC), Bangalore, India, 20–23 February 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Tyralis, H.; Papacharalampous, G.; Langousis, A. A brief review of random forests for water scientists and practitioners and their recent history in water resources. Water 2019, 11, 910. [Google Scholar] [CrossRef] [Green Version]
- Muñoz, P.; Orellana-Alvear, J.; Willems, P.; Célleri, R. Flash-Flood Forecasting in an Andean Mountain Catchment—Development of a Step-Wise Methodology Based on the Random Forest Algorithm. Water 2018, 10, 1519. [Google Scholar] [CrossRef] [Green Version]
- Bendix, J.; Fries, A.; Zárate, J.; Trachte, K.; Rollenbeck, R.; Pucha-Cofrfrep, F.; Paladines, R.; Palacios, I.; Orellana, J.; Oñate-Valdivieso, F.; et al. RadarNet-Sur first weather radar network in tropical high mountains. Bull. Am. Meteorol. Soc. 2017, 98, 1235–1254. [Google Scholar] [CrossRef]
- Guallpa, M.; Orellana-Alvear, J.; Bendix, J. Tropical andes radar precipitation estimates need high temporal and moderate spatial resolution. Water 2019, 11, 1038. [Google Scholar] [CrossRef] [Green Version]
- Rollenbeck, R.; Bendix, J. Rainfall distribution in the Andes of southern Ecuador derived from blending weather radar data and meteorological field observations. Atmos. Res. 2011, 99, 277–289. [Google Scholar] [CrossRef]
- Célleri, R.; Willems, P.; Buytaert, W.; Feyen, J. Space–time rainfall variability in the Paute basin, Ecuadorian Andes. Hydrol. Process. 2007, 21, 3316–3327. [Google Scholar] [CrossRef]
- Orellana-Alvear, J.; Célleri, R.; Rollenbeck, R.; Bendix, J. Analysis of Rain Types and Their Z–R Relationships at Different Locations in the High Andes of Southern Ecuador. J. Appl. Meteorol. Climatol. 2017, 56, 3065–3080. [Google Scholar] [CrossRef]
- Orellana-Alvear, J.; Célleri, R.; Rollenbeck, R.; Bendix, J. Optimization of X-Band Radar Rainfall Retrieval in the Southern Andes of Ecuador Using a Random Forest Model. Remote Sens. 2019, 11, 1632. [Google Scholar] [CrossRef] [Green Version]
- Lo Conti, F.; Francipane, A.; Pumo, D.; Noto, L.V. Exploring single polarization X-band weather radar potentials for local meteorological and hydrological applications. J. Hydrol. 2015, 531, 508–522. [Google Scholar] [CrossRef]
- Van de Beek, C.Z.; Leijnse, H.; Hazenberg, P.; Uijlenhoet, R. Close-range radar rainfall estimation and error analysis. Atmos. Meas. Tech. 2017, 9, 3837–3850. [Google Scholar] [CrossRef] [Green Version]
- Chaipimonplin, T.; See, L.; Kneale, P. Improving neural network for flood forecasting using radar data on the Upper Ping River. In Proceedings of the 19th International Congress on Modelling and Simulation, Perth, Australia, 12–16 December 2011. [Google Scholar]
- Hamel, P.; Riveros-Iregui, D.; Ballari, D.; Browning, T.; Célleri, R.; Chandler, D.; Chun, K.P.; Destouni, G.; Jacobs, S.; Jasechko, S.; et al. Watershed services in the humid tropics: Opportunities from recent advances in ecohydrology. Ecohydrology 2018, 11. [Google Scholar] [CrossRef]
- Goudenhoofdt, E.; Delobbe, L. Evaluation of radar-gauge merging methods for quantitative precipitation estimates. Hydrol. Earth Syst. Sci. 2009, 13, 195–203. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Tyralis, H.; Papacharalampous, G. Variable selection in time series forecasting using random forests. Algorithms 2017, 10, 114. [Google Scholar] [CrossRef] [Green Version]
- Sudheer, K.P.; Gosain, A.K.; Ramasastri, K.S. A data-driven algorithm for constructing artificial neural network rainfall-runoff models. Hydrol. Process. 2002, 16, 1325–1330. [Google Scholar] [CrossRef]
- Javelle, P.; Fouchier, C.; Arnaud, P.; Lavabre, J. Flash flood warning at ungauged locations using radar rainfall and antecedent soil moisture estimations. J. Hydrol. 2010, 394, 267–274. [Google Scholar] [CrossRef]
- Ba, H.; Guo, S.; Wang, Y.; Hong, X.; Zhong, Y. Improving ANN model performance in runoff forecasting by adding soil moisture input and using data preprocessing techniques Huanhuan. Hydrol. Res. 2018, 49, 744–760. [Google Scholar] [CrossRef] [Green Version]
- Jadidoleslam, N.; Mantilla, R.; Krajewski, W.F.; Goska, R. Investigating the role of antecedent SMAP satellite soil moisture, radar rainfall and MODIS vegetation on runo ff production in an agricultural region. J. Hydrol. 2019, 579, 124210. [Google Scholar] [CrossRef] [Green Version]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Kling, H.; Fuchs, M.; Paulin, M. Runoff conditions in the upper Danube basin under an ensemble of climate change scenarios. J. Hydrol. 2012, 424, 264–277. [Google Scholar] [CrossRef]
- Ovando, A.; Tomasella, J.; Rodriguez, D.A.; Martinez, J.M.; Siqueira-Junior, J.L.; Pinto, G.L.; Passy, P.; Vauchel, P.; Noriega, L.; von Randow, C. Extreme flood events in the Bolivian Amazon wetlands. J. Hydrol. Reg. Stud. 2016, 5, 293–308. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | n Trees | N Features | Depth of Tree | OOB Score |
|---|---|---|---|---|
| Adjusted | 400 | 18 | 40 | 0.88 |
| Adjusted + proxy | 400 | 30 | 40 | 0.89 |
| Native | 400 | 18 | 30 | 0.83 |
| Native + proxy | 400 | 36 | 30 | 0.85 |
| Model | Data * | RMSE | PBIAS | MARE | NSE | Original KGE | Modif. KGE | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| KGE | r | β | α | KGE′ | γ | ||||||
| Adjusted | All | 5.38 | 10.02 | 0.25 | 0.75 | 0.78 | 0.87 | 1.10 | 0.85 | 0.72 | 0.77 |
| Adjusted + Proxy | All | 5.33 | 9.87 | 0.25 | 0.75 | 0.77 | 0.87 | 1.10 | 0.83 | 0.71 | 0.76 |
| Native | All | 6.23 | 9.62 | 0.30 | 0.66 | 0.72 | 0.81 | 1.10 | 0.81 | 0.66 | 0.74 |
| Native + Proxy | All | 6.00 | 10.38 | 0.29 | 0.68 | 0.73 | 0.83 | 1.10 | 0.82 | 0.68 | 0.75 |
| Adjusted | <50m3 s−1 | 3.08 | 16.26 | 0.22 | 0.84 | 0.81 | 0.94 | 1.16 | 1.08 | 0.81 | 0.93 |
| Adjusted + Proxy | <50m3 s−1 | 3.04 | 17.27 | 0.24 | 0.85 | 0.81 | 0.94 | 1.17 | 1.04 | 0.79 | 0.89 |
| Native | <50m3 s−1 | 3.47 | 17.06 | 0.26 | 0.8 | 0.80 | 0.92 | 1.17 | 1.05 | 0.79 | 0.90 |
| Native + Proxy | <50m3 s−1 | 3.53 | 20.51 | 0.29 | 0.8 | 0.77 | 0.92 | 1.21 | 1.05 | 0.75 | 0.87 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orellana-Alvear, J.; Célleri, R.; Rollenbeck, R.; Muñoz, P.; Contreras, P.; Bendix, J. Assessment of Native Radar Reflectivity and Radar Rainfall Estimates for Discharge Forecasting in Mountain Catchments with a Random Forest Model. Remote Sens. 2020, 12, 1986. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12121986
Orellana-Alvear J, Célleri R, Rollenbeck R, Muñoz P, Contreras P, Bendix J. Assessment of Native Radar Reflectivity and Radar Rainfall Estimates for Discharge Forecasting in Mountain Catchments with a Random Forest Model. Remote Sensing. 2020; 12(12):1986. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12121986
Chicago/Turabian StyleOrellana-Alvear, Johanna, Rolando Célleri, Rütger Rollenbeck, Paul Muñoz, Pablo Contreras, and Jörg Bendix. 2020. "Assessment of Native Radar Reflectivity and Radar Rainfall Estimates for Discharge Forecasting in Mountain Catchments with a Random Forest Model" Remote Sensing 12, no. 12: 1986. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12121986