Author Contributions
Conceptualization, J.C.S.; Methodology, R.R., J.C.S., and M.J.C.; Software, R.R., J.C.S., and M.J.C.; Validation, R.R., J.C.S., and M.J.C.; Formal Analysis, R.R. and J.C.S.; Investigation, R.R. and J.C.S.; Data Curation, R.R., J.C.S., and M.J.C.; Writing—Original Draft Preparation, R.R. and J.C.S.; Writing—Review and Editing, J.C.S. and R.R.; Visualization, R.R.; Supervision, J.C.S. All authors have read and agreed to the published version of the manuscript.
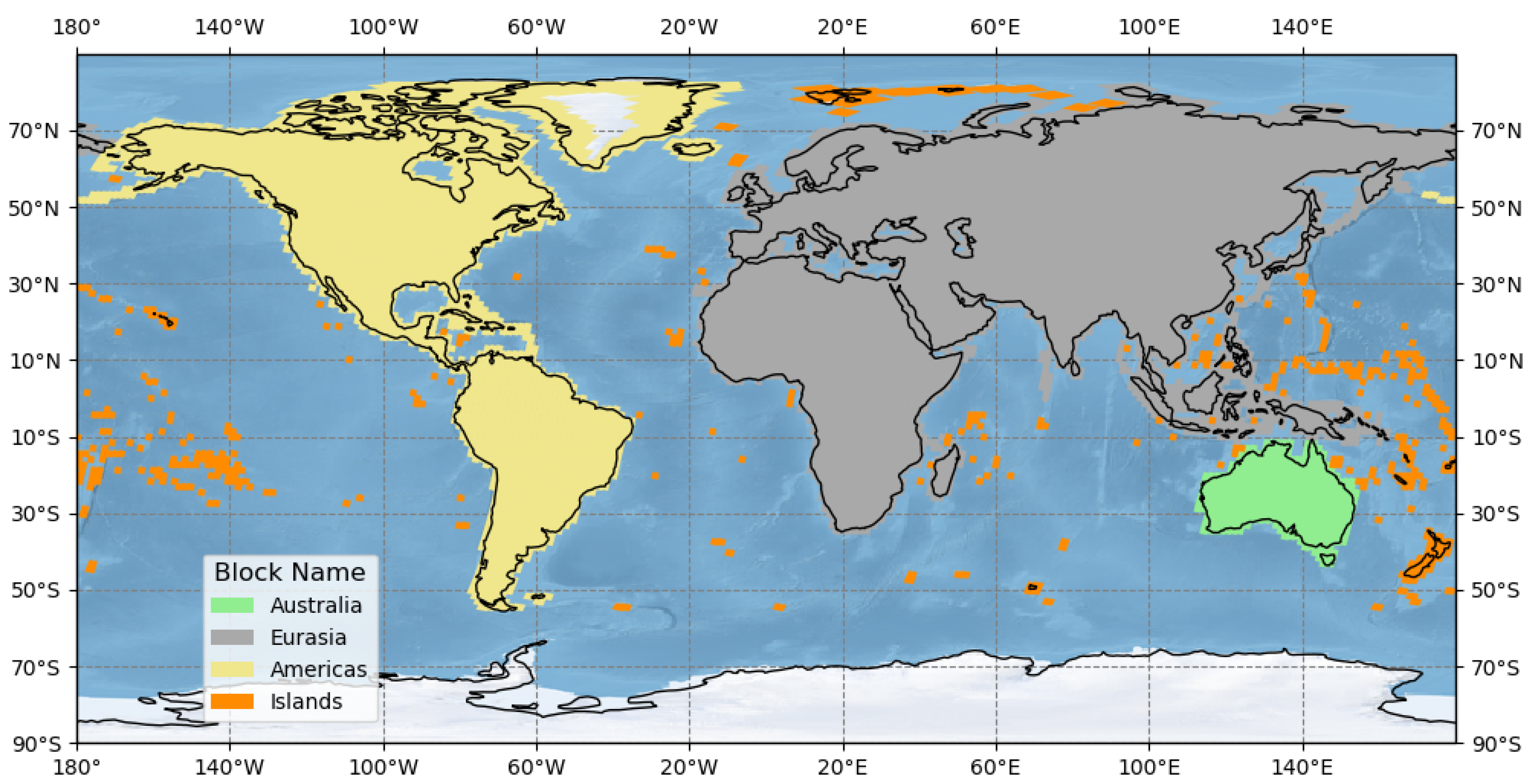
Figure 1.
Map of triangulation blocks used in the bundle adjustment process.
Figure 1.
Map of triangulation blocks used in the bundle adjustment process.
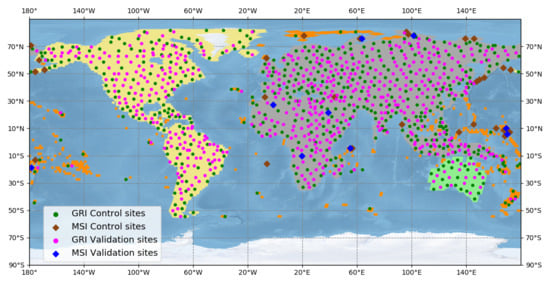
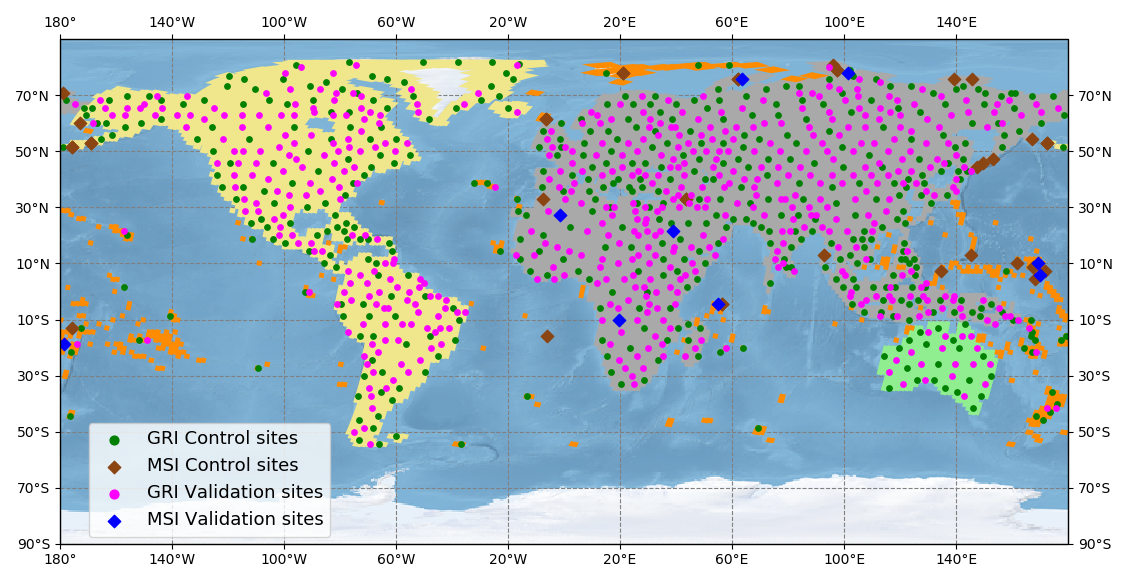
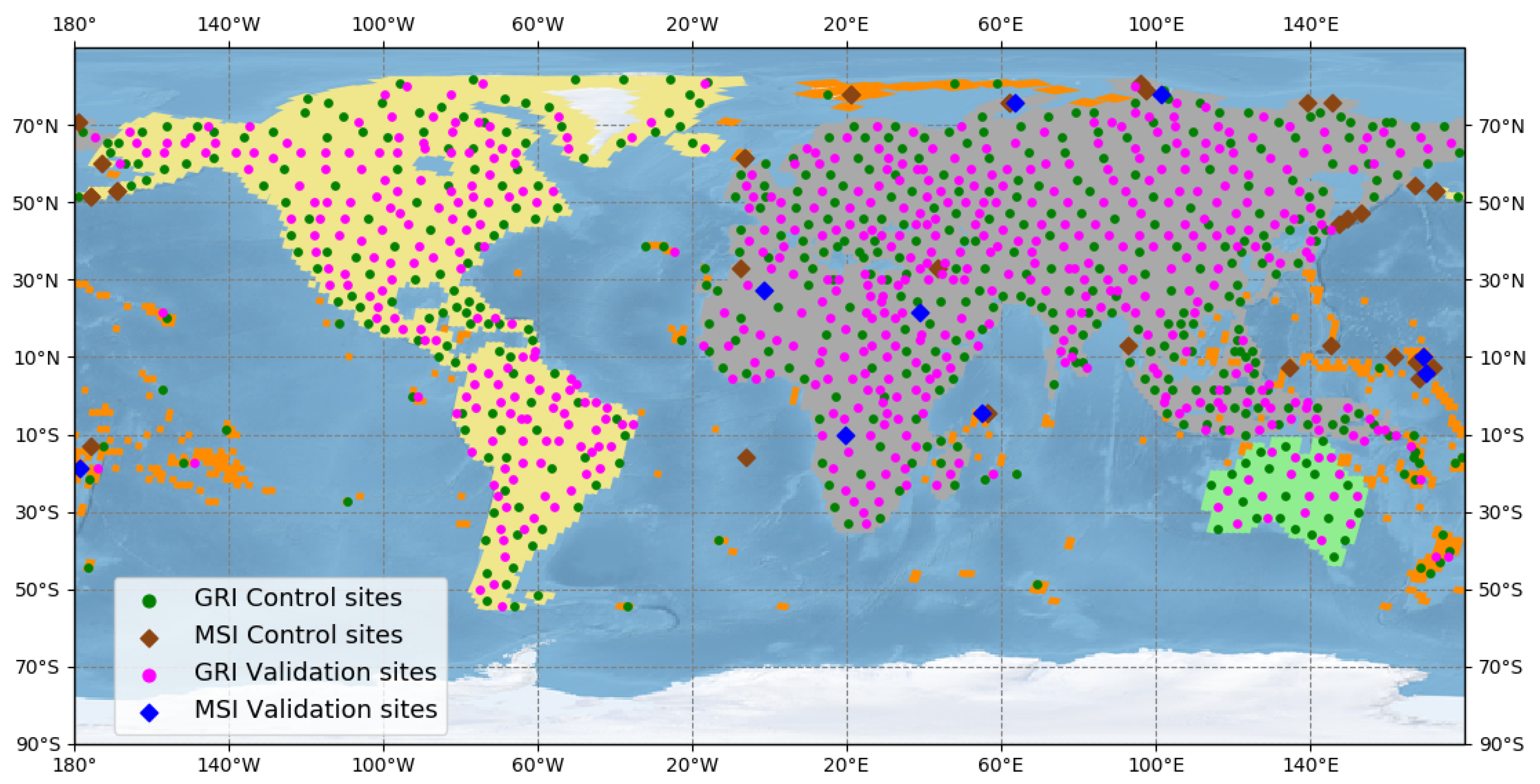
Figure 2.
Control and Validation sites used in the block triangulation procedure. The green and magenta circles represent the Global Reference Image (GRI) control and validation tiles, respectively. The brown and blue diamonds represent the Multispectral Imager (MSI) control and validation tiles, respectively.
Figure 2.
Control and Validation sites used in the block triangulation procedure. The green and magenta circles represent the Global Reference Image (GRI) control and validation tiles, respectively. The brown and blue diamonds represent the Multispectral Imager (MSI) control and validation tiles, respectively.
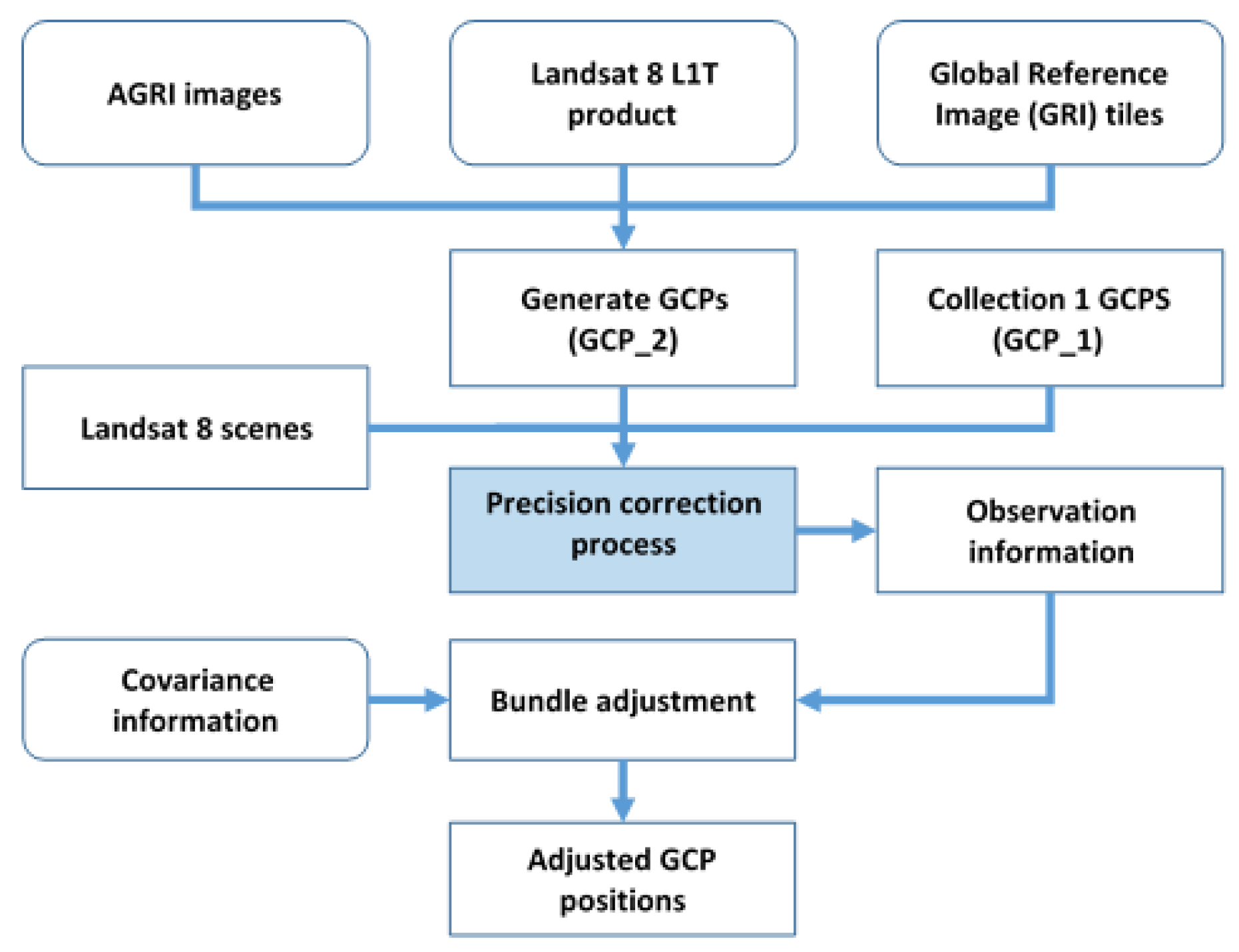
Figure 3.
Schematic flow of how GRI- and Landsat-8-derived Ground Control Points (GCPs) are used in the bundle adjustment techniques. The triangulation-based bundle adjustment provides correction estimates for the spacecraft information (ephemeris, velocity, attitude, attitude rate) along with position updates for the GCPs, but we are interested only in the updates to the GCP positions.
Figure 3.
Schematic flow of how GRI- and Landsat-8-derived Ground Control Points (GCPs) are used in the bundle adjustment techniques. The triangulation-based bundle adjustment provides correction estimates for the spacecraft information (ephemeris, velocity, attitude, attitude rate) along with position updates for the GCPs, but we are interested only in the updates to the GCP positions.
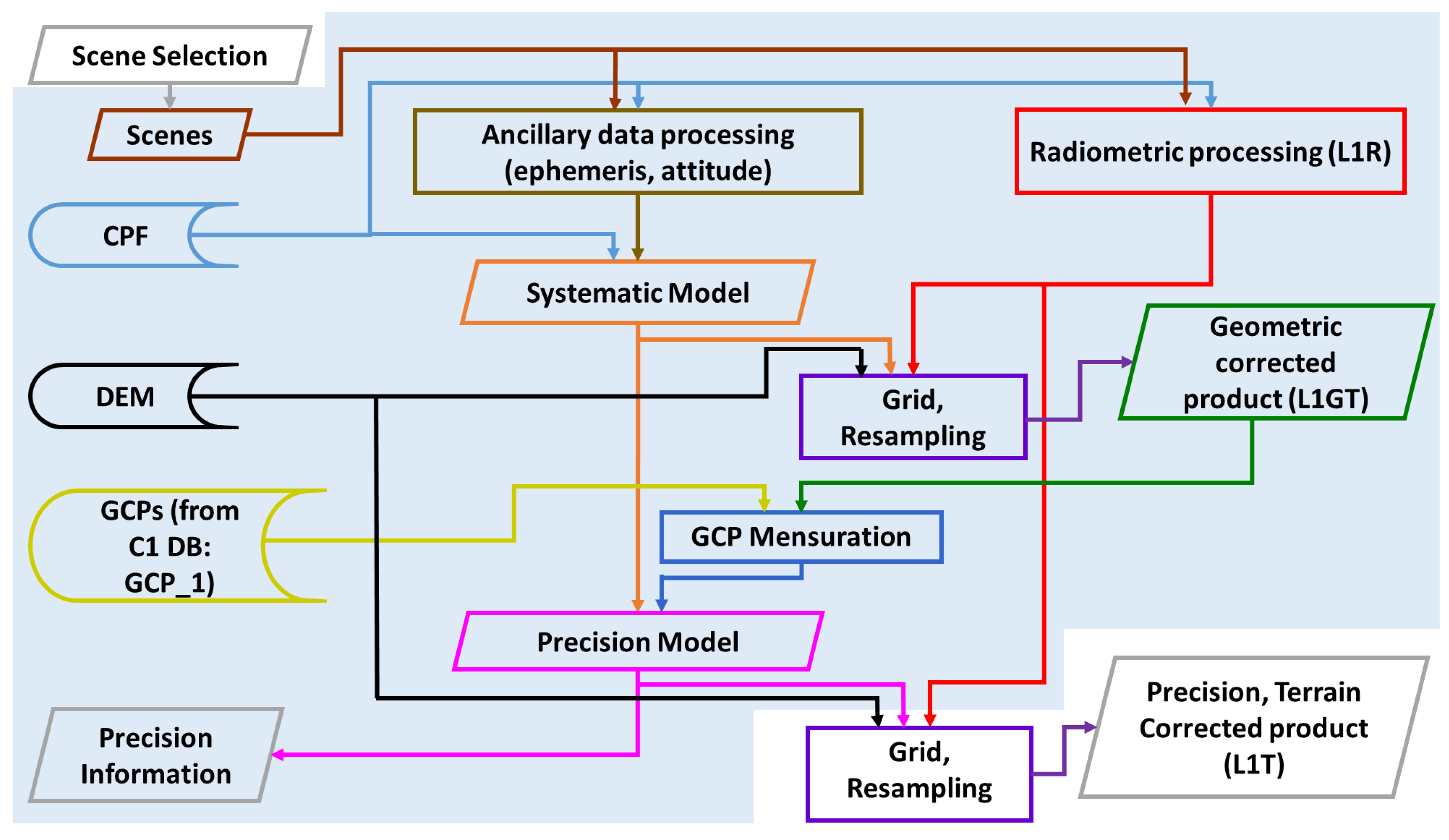
Figure 4.
A simplified version of the Landsat process flow for generating terrain-corrected products. The shaded (transparent blue) portion shows the algorithm used in the precision correction process. Each input, output, and process shape is color-coded, and the arrows from them are also color-coded for ease of understanding. For example, a Calibration Parameter File (CPF) stores the calibration parameters and, therefore, is shown using the corresponding flowchart shape with a blue border. The CPF is used in ancillary data processing, systematic model generation, and in the radiometric processing, and is therefore shown in blue arrows.
Figure 4.
A simplified version of the Landsat process flow for generating terrain-corrected products. The shaded (transparent blue) portion shows the algorithm used in the precision correction process. Each input, output, and process shape is color-coded, and the arrows from them are also color-coded for ease of understanding. For example, a Calibration Parameter File (CPF) stores the calibration parameters and, therefore, is shown using the corresponding flowchart shape with a blue border. The CPF is used in ancillary data processing, systematic model generation, and in the radiometric processing, and is therefore shown in blue arrows.
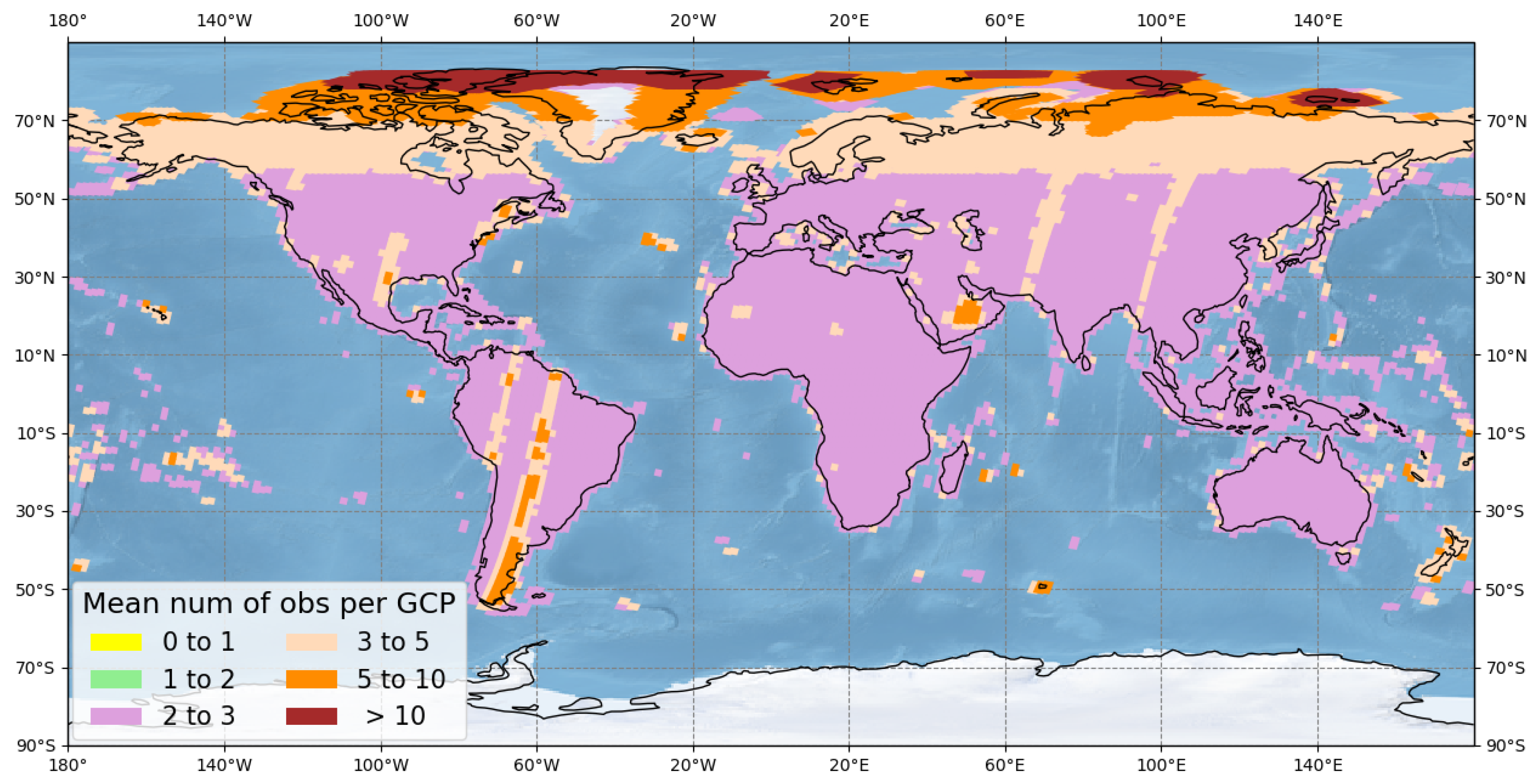
Figure 5.
Average number of observations per GCP for each World Reference System (WRS)-2 path/row used in the bundle adjustment procedure. The large overlap in the northern latitudes generates a higher number of observations per GCP.
Figure 5.
Average number of observations per GCP for each World Reference System (WRS)-2 path/row used in the bundle adjustment procedure. The large overlap in the northern latitudes generates a higher number of observations per GCP.
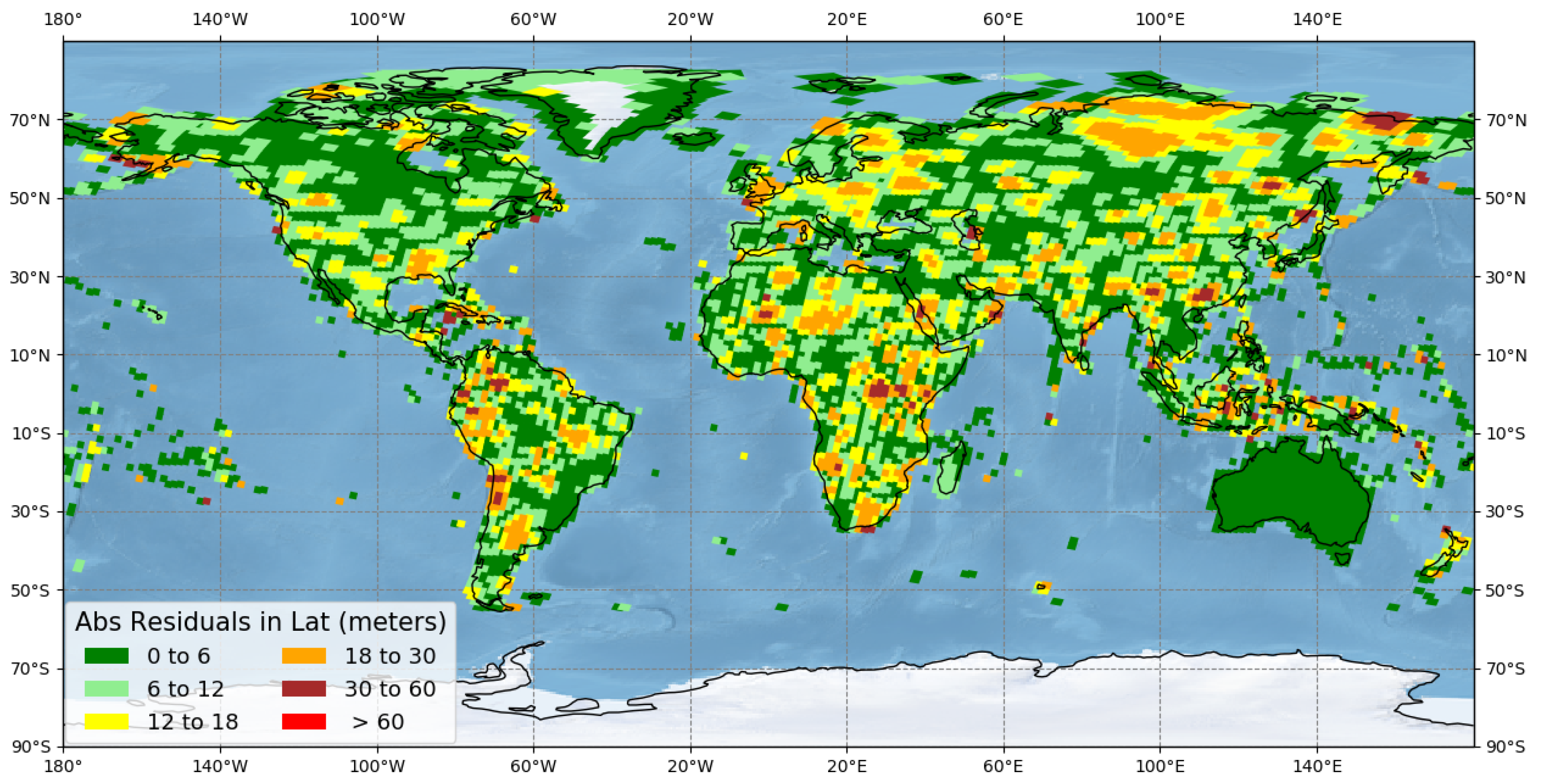
Figure 6.
Mean residuals of the GCPs in the latitude direction for each of the WRS-2 paths/rows, computed from the block triangulation solution.
Figure 6.
Mean residuals of the GCPs in the latitude direction for each of the WRS-2 paths/rows, computed from the block triangulation solution.
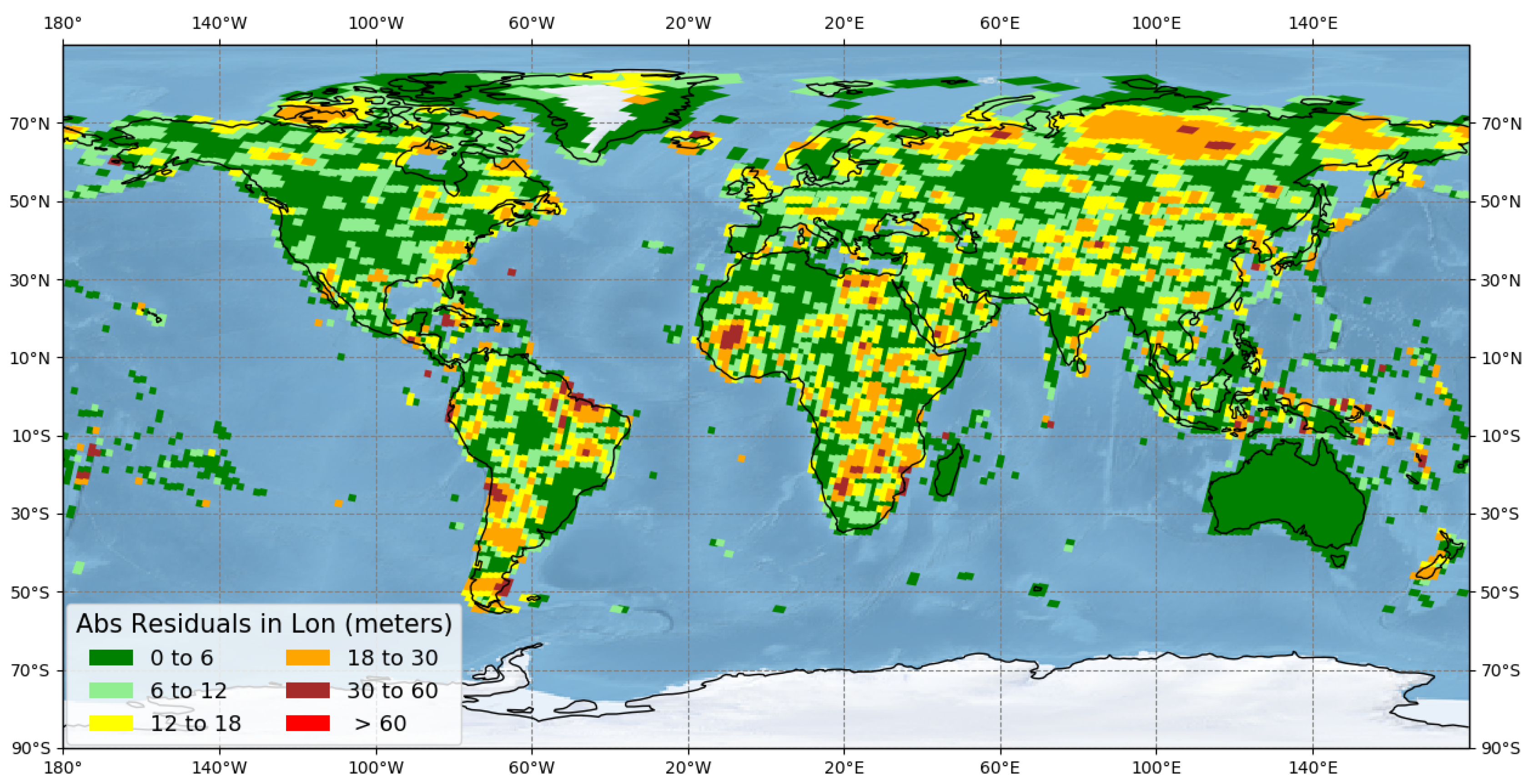
Figure 7.
Mean residuals of the GCPs in the longitude direction for each of the WRS-2 paths/rows, computed from the block triangulation solution.
Figure 7.
Mean residuals of the GCPs in the longitude direction for each of the WRS-2 paths/rows, computed from the block triangulation solution.
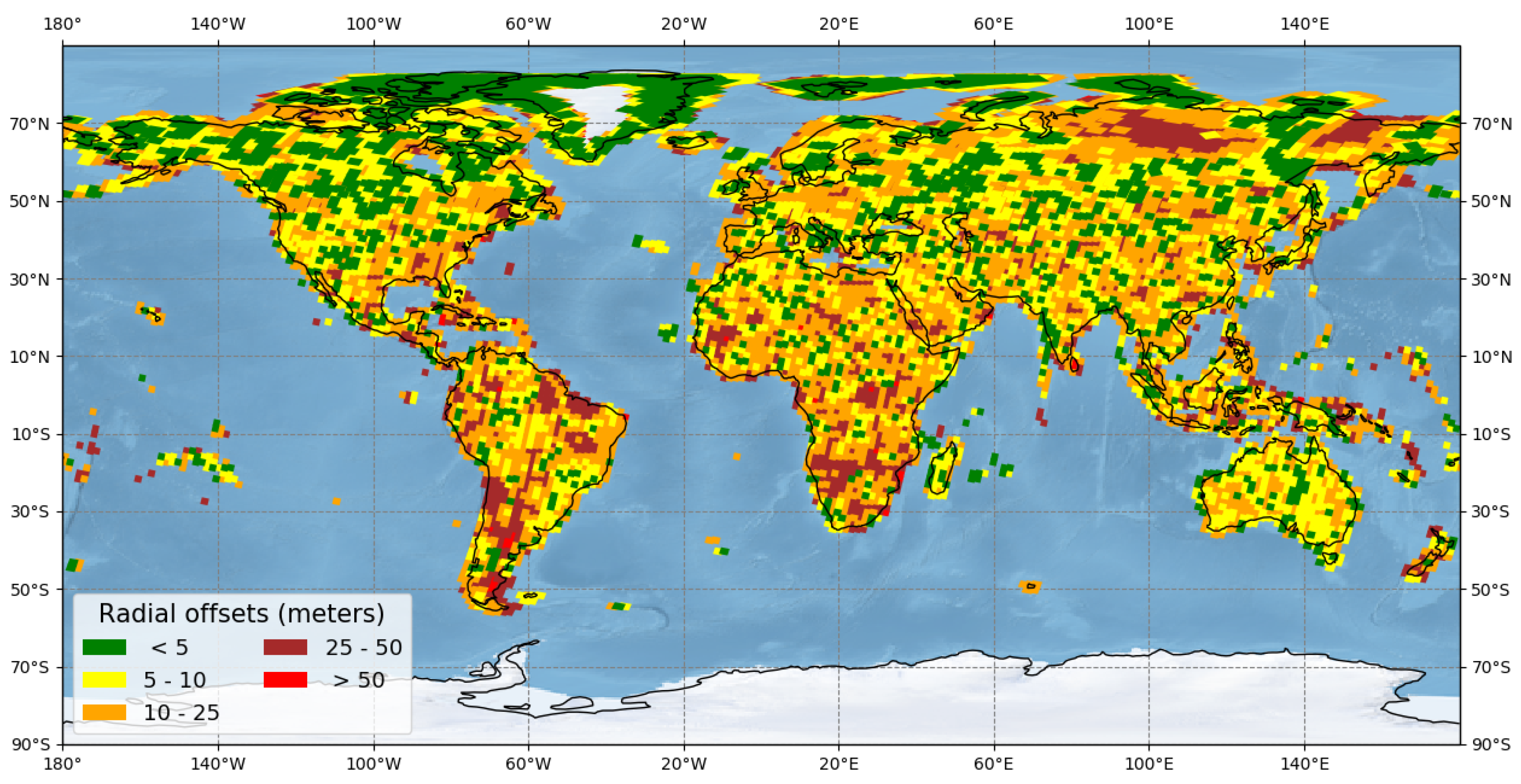
Figure 8.
Radial geodetic offsets of the Landsat 8 (L8) scenes processed using the Collection-1 GCPs.
Figure 8.
Radial geodetic offsets of the Landsat 8 (L8) scenes processed using the Collection-1 GCPs.
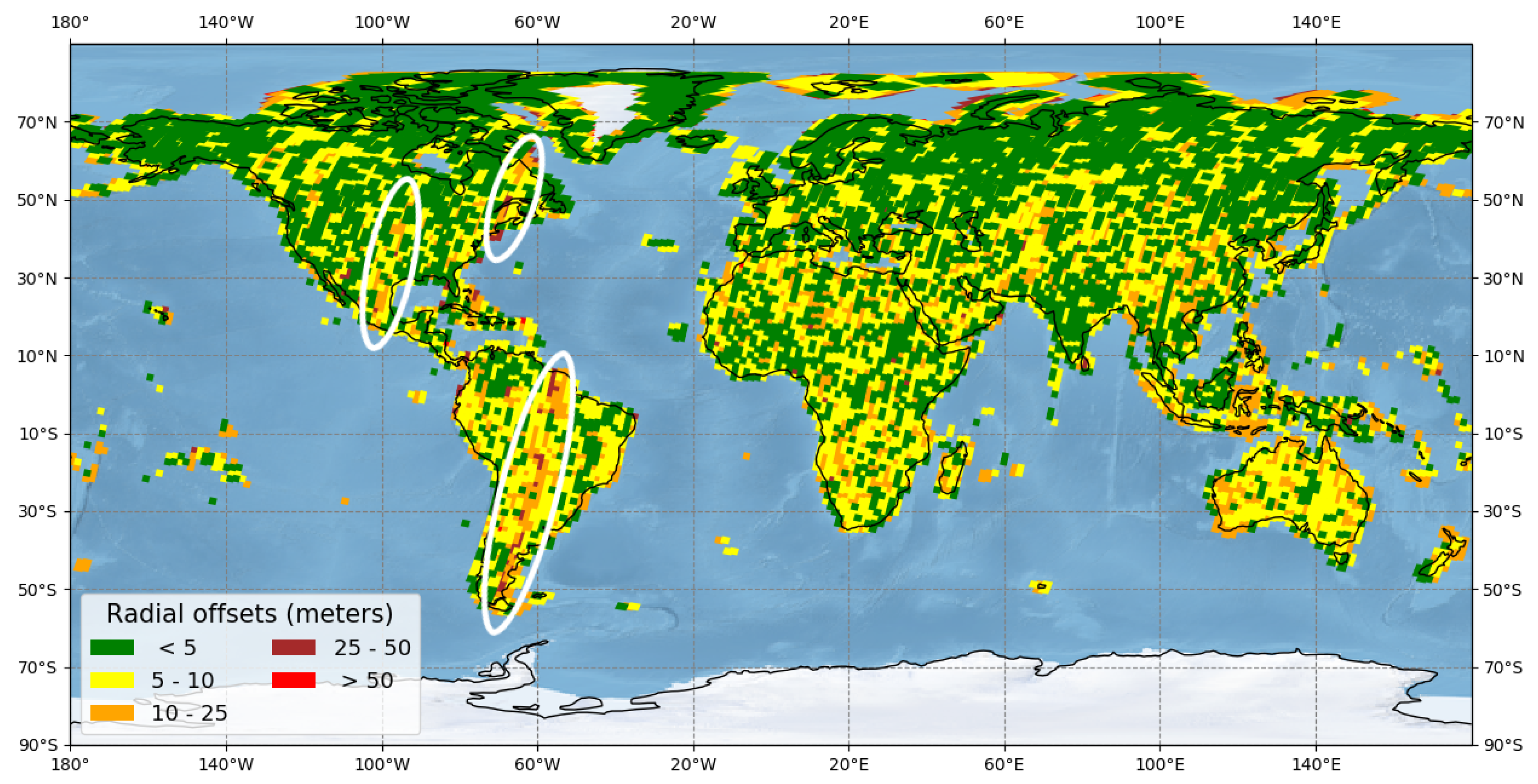
Figure 9.
Radial geodetic offsets of the L8 scenes processed using the updated GCPs.
Figure 9.
Radial geodetic offsets of the L8 scenes processed using the updated GCPs.
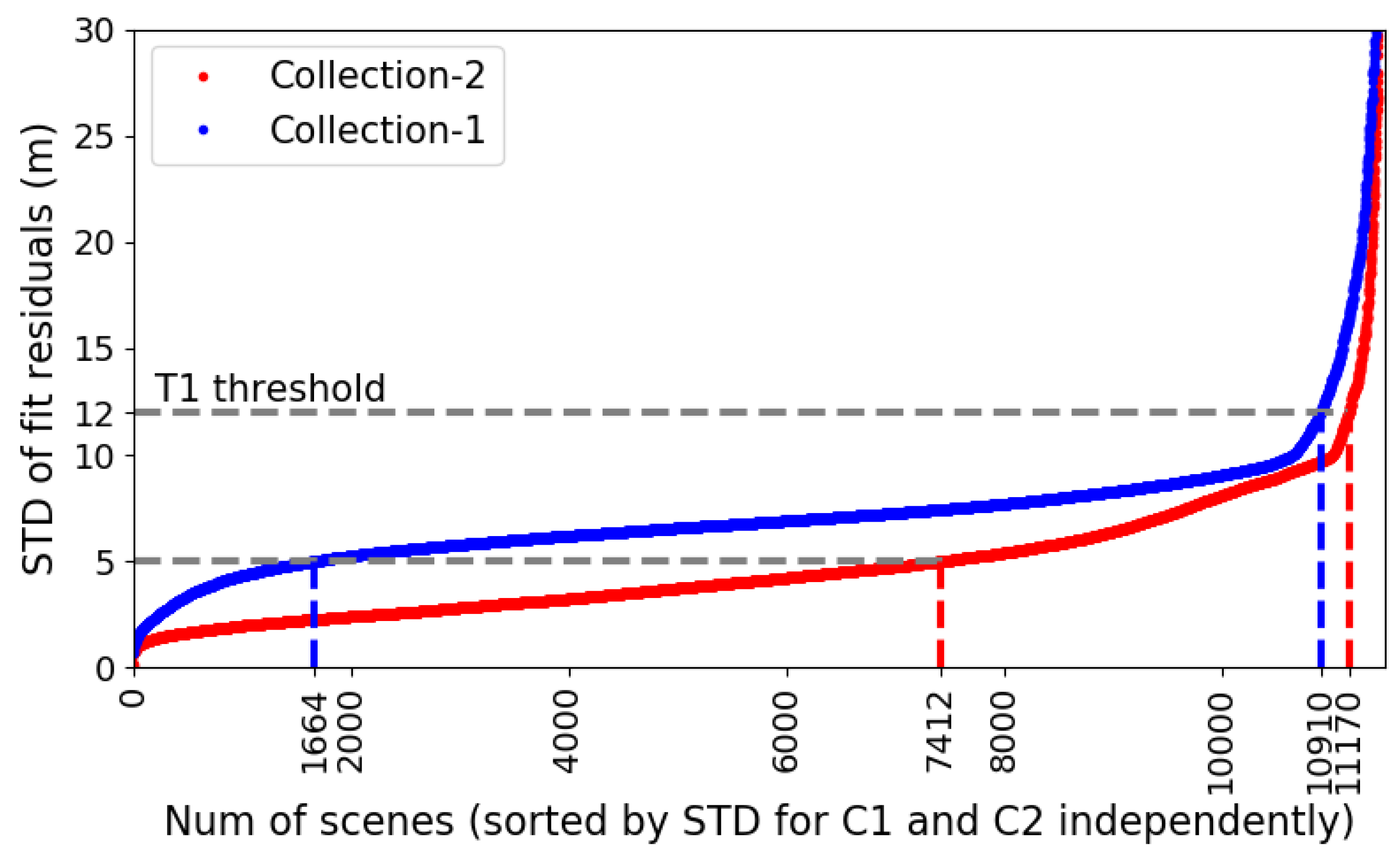
Figure 10.
Comparison of the STD from the precision model fit residuals between Collection-1 and Collection-2 processing of the test scenes. The red and blue lines indicate the STD for the Collection-2 and Collection-1 products, respectively. The Collection-2 products show significantly lower STDs than Collection-1 products.
Figure 10.
Comparison of the STD from the precision model fit residuals between Collection-1 and Collection-2 processing of the test scenes. The red and blue lines indicate the STD for the Collection-2 and Collection-1 products, respectively. The Collection-2 products show significantly lower STDs than Collection-1 products.
Table 1.
Number of Global Reference Image (GRI) control and validation tiles used in the triangulation block.
Table 1.
Number of Global Reference Image (GRI) control and validation tiles used in the triangulation block.
| Block Name | Number of Unique | Unique GRI Tiles | GRI | GRI | Unique | MSI | MSI |
|---|
| GRI Images | (Unique Locations) | Control Tiles | Validation Tiles | MSI Tiles | Control Tiles | Validation Tiles |
|---|
| Australia | 77 | 37 | 21 | 16 | 0 | 0 | 0 |
| Americas | 1006 | 310 | 138 | 172 | 7 | 7 | 0 |
| Eurasia | 1953 | 626 | 279 | 347 | 21 | 16 | 5 |
| Islands | 159 | 47 | 36 | 11 | 18 | 14 | 4 |
| Total | 3195 | 1020 | 474 | 546 | 46 | 37 | 9 |
Table 2.
Standard deviations used to determine the weights or a priori covariance in the space-based triangulation method. Note that the AGRI and GRI GCPs were heavily weighted (small Standard Deviation (STD)) to add constraints to the bundle adjustment so that most of the adjustments are imparted to the Global Land Survey (GLS) GCPs.
Table 2.
Standard deviations used to determine the weights or a priori covariance in the space-based triangulation method. Note that the AGRI and GRI GCPs were heavily weighted (small Standard Deviation (STD)) to add constraints to the bundle adjustment so that most of the adjustments are imparted to the Global Land Survey (GLS) GCPs.
| Parameters | Standard Deviations (to Construct Covariance) | Units |
|---|
| GLS GCP (lat, lon, ht) | (10000, 10000, 30) | meters |
| AGRI GCP (lat, lon, ht) | (5, 5, 5) | meters |
| GRI GCP (lat, lon, ht) | (5, 5, 5) | meters |
| MSI GCP (lat, lon, ht) | (10, 10, 5) | meters |
| Image Point (x, y) | (5,5) | meters |
| Ephemeris/Position (X, Y, Z) | (4, 4, 4) | meters |
| Ephemeris rate/Velocity (X, Y, Z) | (0.001, 0.001, 0.001) | meters |
| Attitude (roll, pitch, yaw) | (1 × 10, 1 × 10, 1 × 10) | radians |
| Attitude rate (roll, pitch, yaw) | (1 × 10, 1 × 10, 1 × 10) | radians |
| Time constant for attitude correlation | 60 | seconds |
Table 3.
A sample record for the four input files used in the triangulation method. The input files contain a priori information and are linked with each other by a unique identifier. The description for the comma-separated values is provided at the top for each of the files.
Table 3.
A sample record for the four input files used in the triangulation method. The input files contain a priori information and are linked with each other by a unique identifier. The description for the comma-separated values is provided at the top for each of the files.
| Input File | Sample Record |
|---|
| Pass | PassID, Path, Year, DOY, PassCenterTime, , , , , , |
| file | P0982014280, 098, 2014, 280, 2026.105844, 4.0, 4.0, 4.0, 0.001, 0.001, 0.001 |
| Image | ImageID, PassID, Path, Row, Year, DOY, ImageCenterTime, TimeConst, |
| file | , , , , , |
| | I0982014280069, P0982014280, 098, 069, 2014, 280, 2039.397235, 60.0, |
| | 1.0 × 10, 1.0 × 10, 1.0 × 10, 1.0 × 10, 1.0 × 10, 1.0 × 10 |
| Observation | ObsID, , ImageID, Year, DOY, ObsTime, |
| file | X, Y, Z, , , , , , , , |
| | dx/dSample, dx/dLine, dy/dSample, dy/dLine |
| | O098201428006900539, G098069GLS0347, I0982014280069, 2014, 280, 2030.4219, |
| | −5,511,185.7, 4,178,211.06, −1,538,758.9, 1941.53642, −94.802, −7244.9214, −0.010875994, −0.054445814, 5.0, 5.0, |
| | −2.0400 × 10, −1.3980 × 10, −1.3970 × 10, 2.0500 × 10 |
| Ground | , lat, lon, ht, , , |
| file | G098069GLS0347, -12.607373064, 143.194174804, 339.089, 10000.0, 10000.0, 30.0 |
Table 4.
Number of observations, passes, images, and GCPs used for each triangulation block in the space-based bundle adjustment procedure.
Table 4.
Number of observations, passes, images, and GCPs used for each triangulation block in the space-based bundle adjustment procedure.
| Block Name | Number of Observations | Number of Images | Number of Passes | Number of GCPs |
|---|
| GLS | GRI | MSI | AGRI |
|---|
| Australia | 581,706 | 405 | 274 | 286,115 | 8462 | 0 | 10,897 |
| Americas | 5,029,280 | 3636 | 1845 | 1,595,420 | 98,392 | 656 | 0 |
| Eurasia | 7,938,901 | 5673 | 2993 | 3,228,007 | 175,281 | 6833 | 47 |
| Islands | 236,175 | 993 | 844 | 54,573, | 21,773 | 3536 | 0 |
| Total | 13,786,062 | 10,707 | 5956 | 5,164,115 | 303,908 | 11,025 | 10,944 |
Table 5.
Number of iterations and the initial and final root mean square (RMS) error of the observations in the bundle adjustment for each block. The Australia block showed smaller RMS error before bundle adjustment, as the GCPs were adjusted using the AGRI reference dataset.
Table 5.
Number of iterations and the initial and final root mean square (RMS) error of the observations in the bundle adjustment for each block. The Australia block showed smaller RMS error before bundle adjustment, as the GCPs were adjusted using the AGRI reference dataset.
| Block Name | Number of Iterations | RMS Error (Micro-Radians) |
|---|
| Before Bundle Adjustment | After Bundle Adjustment |
|---|
| Australia | 2 | 9.33 × | 1.97 × |
| Americas | 2 | 1.80 × | 2.79 × |
| Eurasia | 2 | 1.89 × | 2.63 × |
| Islands | 2 | 1.90 × | 3.63 × |
Table 6.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Australia block.
Table 6.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Australia block.
| | Type | Number of | Mean | Mean | STD | STD | Consistency | Consistency |
|---|
| Scenes | XT (m) | AT (m) | XT (m) | AT (m) | XT (m) | AT (m) |
|---|
| Collection-1 | Control | 22 | 4.31 | −4.09 | 4.13 | 5.13 | 1.58 | 2.08 |
| Updated GCPs | Control | 22 | 3.87 | −5.18 | 4.11 | 4.61 | 1.09 | 1.83 |
| Collection-1 | Validation | 17 | 3.95 | −4.20 | 4.93 | 3.90 | 1.50 | 2.04 |
| Updated GCPs | Validation | 17 | 3.65 | −4.63 | 4.83 | 4.41 | 1.27 | 1.78 |
| Updated GCPs (all) | Validation | 17 | 3.70 | −4.69 | 4.79 | 4.32 | 1.23 | 1.69 |
Table 7.
Validation of the GCP updates using the geodetic accuracy validation procedure for all the blocks. One scene per land path/row was processed using GCPs before and after bundle adjustment for each block.
Table 7.
Validation of the GCP updates using the geodetic accuracy validation procedure for all the blocks. One scene per land path/row was processed using GCPs before and after bundle adjustment for each block.
| Block | Type | Number of | Mean | Mean | STD | STD | Consistency | Consistency |
|---|
| Scenes | XT (m) | AT (m) | XT (m) | AT (m) | XT (m) | AT (m) |
|---|
| Australia | Collection-1 | 404 | 4.61 | −4.20 | 4.78 | 4.93 | 2.23 | 2.70 |
| Updated GCPs | 404 | 4.10 | −4.80 | 4.49 | 4.76 | 1.96 | 2.49 |
| Americas | Collection-1 | 3156 | 0.72 | 0.94 | 13.25 | 10.67 | 6.70 | 6.22 |
| Updated GCPs | 3156 | 0.73 | 0.81 | 7.70 | 6.43 | 2.97 | 3.20 |
| Eurasia | Collection-1 | 5421 | −1.03 | 0.62 | 13.35 | 11.81 | 7.30 | 6.93 |
| Updated GCPs | 5421 | −1.29 | −1.85 | 6.03 | 5.62 | 2.92 | 3.27 |
| Islands | Collection-1 | 387 | −1.14 | −0.09 | 12.90 | 11.23 | 6.83 | 7.57 |
| Updated GCPs | 387 | −1.69 | −1.30 | 7.14 | 7.89 | 4.41 | 4.65 |
Table 8.
Validation results for the Australia block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 Level-1 terrain-corrected (L1T) products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
Table 8.
Validation results for the Australia block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 Level-1 terrain-corrected (L1T) products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
| Type | Number of Tiles | GLS | Adjusted GCPs |
|---|
| RMSEr | CE90 | RMSEr | CE90 |
|---|
| Control | 44 | 4.78 | 7.25 | 3.46 | 5.25 |
| Validation | 33 | 4.63 | 7.02 | 3.74 | 5.68 |
| All | 77 | 4.71 | 7.15 | 3.58 | 5.44 |
Table 9.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Americas block.
Table 9.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Americas block.
| | Type | Number of | Mean | Mean | STD | STD | Consistency | Consistency |
|---|
| Scenes | XT (m) | AT (m) | XT (m) | AT (m) | XT (m) | AT (m) |
|---|
| Collection-1 | Control | 161 | 1.7 | 0.44 | 14.64 | 10.91 | 7.47 | 6.48 |
| Updated GCPs | Control | 161 | 1.26 | 0.97 | 8.29 | 7.21 | 2.16 | 2.57 |
| Collection-1 | Validation | 191 | 3.04 | 1.17 | 16.6 | 12.71 | 7.36 | 6.54 |
| Updated GCPs | Validation | 191 | 2.03 | 0.5 | 7.44 | 5.57 | 2.11 | 2.50 |
| Updated GCPs (all) | Validation | 191 | 2.04 | 0.50 | 7.42 | 5.5 | 2.00 | 2.42 |
Table 10.
Validation results for the Americas block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
Table 10.
Validation results for the Americas block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
| Type | Number of Tiles | GLS | Adjusted GCPs |
|---|
| RMSEr | CE90 | RMSEr | CE90 |
|---|
| Control | 472 | 14.82 | 22.48 | 5.04 | 7.65 |
| Validation | 534 | 16.33 | 24.77 | 4.59 | 6.96 |
| Control + Validation | 1006 | 15.64 | 23.73 | 4.81 | 7.29 |
| MSI Validation | 8 | 18.05 | 27.39 | 8.51 | 12.92 |
Table 11.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Eurasia block.
Table 11.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Eurasia block.
| | Type | Number of | Mean | Mean | STD | STD | Consistency | Consistency |
|---|
| Scenes | XT (m) | AT (m) | XT (m) | AT (m) | XT (m) | AT (m) |
|---|
| Collection-1 | Control | 309 | −1.05 | −0.10 | 11.29 | 11.14 | 7.63 | 7.43 |
| Updated GCPs | Control | 309 | −1.79 | −2.42 | 5.53 | 5.13 | 2.22 | 2.78 |
| Collection-1 | Validation | 375 | −0.01 | 0.35 | 13.98 | 14.02 | 7.82 | 7.11 |
| Updated GCPs | Validation | 376 | −1.03 | −1.79 | 5.22 | 4.94 | 2.01 | 2.42 |
| Updated GCPs (all) | Validation | 380 | −1.09 | −1.67 | 5.13 | 4.92 | 1.90 | 2.33 |
Table 12.
Validation results for the Eurasia block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
Table 12.
Validation results for the Eurasia block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
| Type | Number of Tiles | GLS | Adjusted GCPs |
|---|
| RMSEr | CE90 | RMSEr | CE90 |
|---|
| Control | 838 | 16.41 | 24.90 | 4.25 | 6.45 |
| Validation | 1115 | 18.42 | 27.96 | 4.49 | 6.81 |
| Control + Validation | 1953 | 17.59 | 26.69 | 4.39 | 6.66 |
| MSI Validation | 53 | 19.00 | 28.83 | 7.97 | 12.09 |
Table 13.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Islands block.
Table 13.
Validation of the GCP updates using the geodetic accuracy validation procedure for the Islands block.
| | Type | Number of | Mean | Mean | STD | STD | Consistency | Consistency |
|---|
| Scenes | XT (m) | AT (m) | XT (m) | AT (m) | XT (m) | AT (m) |
|---|
| Collection-1 | Control | 82 | −4.65 | −1.82 | 16.30 | 11.80 | 6.27 | 7.03 |
| Updated GCPs | Control | 82 | 1.21 | −5.13 | 4.87 | 5.76 | 2.77 | 3.49 |
| Collection-1 | Validation | 30 | 1.57 | −8.28 | 12.11 | 11.52 | 5.96 | 7.23 |
| Updated GCPs | Validation | 30 | 1.83 | −3.31 | 5.72 | 6.26 | 2.84 | 3.61 |
| Updated GCPs (all) | Validation | 30 | 1.94 | −3.35 | 5.54 | 6.16 | 2.69 | 3.50 |
Table 14.
Validation results for the Islands block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
Table 14.
Validation results for the Islands block using Image-to-Image characterization between the Sentinel-2 GRI tiles and Landsat 8 L1T products that were processed before (GLS) and after (Adjusted GCPs) bundle adjustment.
| Type | Number of Tiles | GLS | Adjusted GCPs |
|---|
| RMSEr | CE90 | RMSEr | CE90 |
|---|
| Control | 115 | 19.02 | 28.86 | 5.31 | 8.06 |
| Validation | 44 | 17.42 | 26.43 | 7.73 | 11.73 |
| Control + Validation | 159 | 18.59 | 28.21 | 6.08 | 9.22 |
| MSI Validation | 41 | 21.14 | 32.08 | 7.27 | 11.03 |
Table 15.
Comparison of the product type expected in Collection-2 with the corresponding product types in Collection-1. One scene for each land path/row was processed using Collection-1 GCPs (Collection-1) and bundle-adjusted GCPs (Collection-2) using the same processing system. More L1TP (T1) products are expected to be generated in Collection-2 than in Collection-1.
Table 15.
Comparison of the product type expected in Collection-2 with the corresponding product types in Collection-1. One scene for each land path/row was processed using Collection-1 GCPs (Collection-1) and bundle-adjusted GCPs (Collection-2) using the same processing system. More L1TP (T1) products are expected to be generated in Collection-2 than in Collection-1.
| | | Collection-2 |
|---|
| L1TP-T1 | L1TP-T2 | L1GT | Total |
|---|
| Collection-1 | L1TP-T1 | 10,874 | 36 | 4 | 10,914 |
| L1TP-T2 | 296 | 255 | 16 | 567 |
| L1GT | 192 | 41 | 289 | 522 |
| | Total | 11,362 | 332 | 309 | 12,003 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}