
Sensitivity of C-Band SAR Polarimetric Variables to the Directionality of Surface Roughness Parameters




Abstract
:1. Introduction
- (1)
- Identify which polarimetric variables are more sensitive with respect to different incidence angles and various orientations of surface roughness measurements;
- (2)
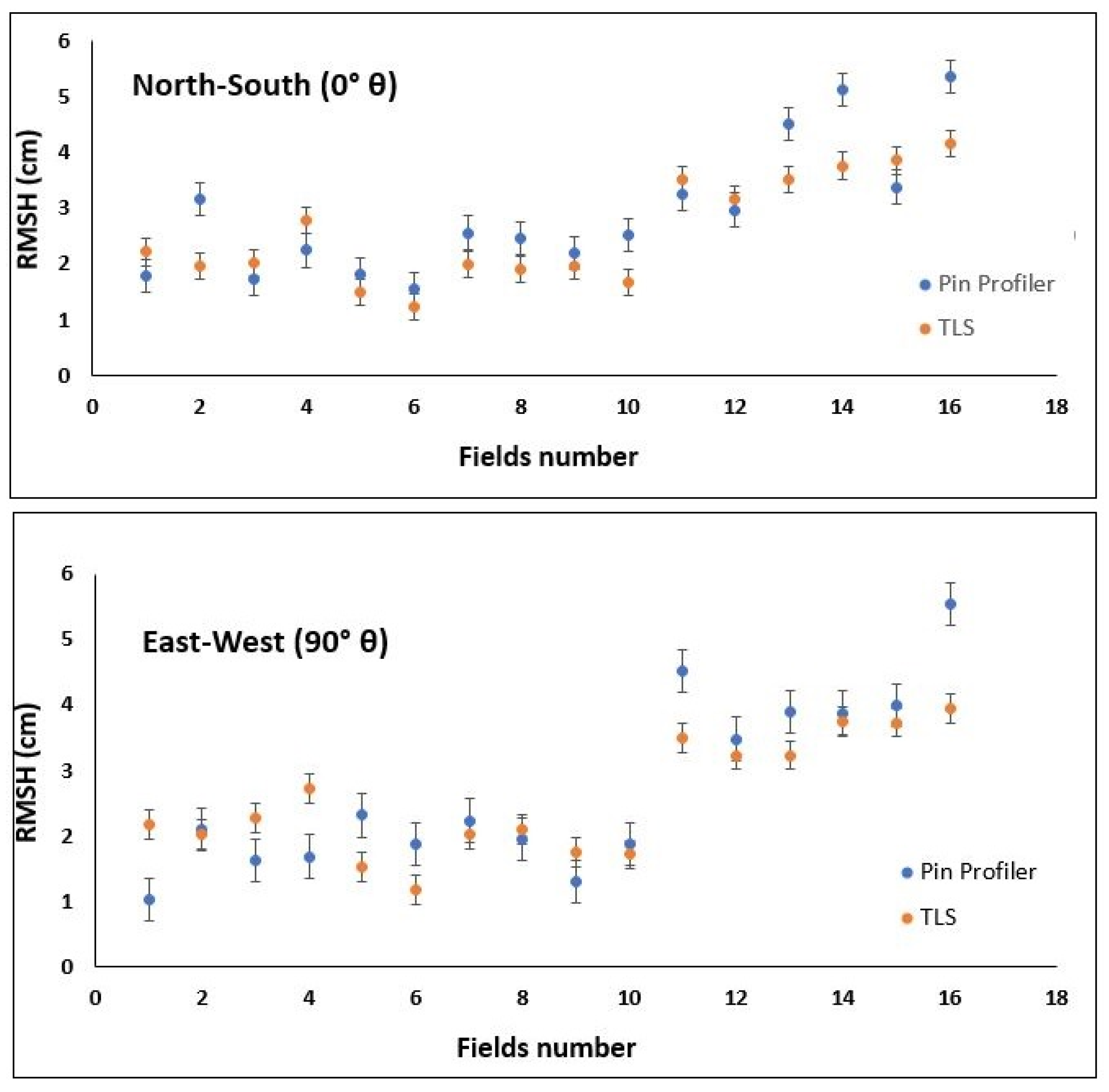
- Evaluate the characterization of surface roughness by pin profiler and TLS and assess how they may contribute to the mischaracterization of surface roughness.
2. Materials and Methods
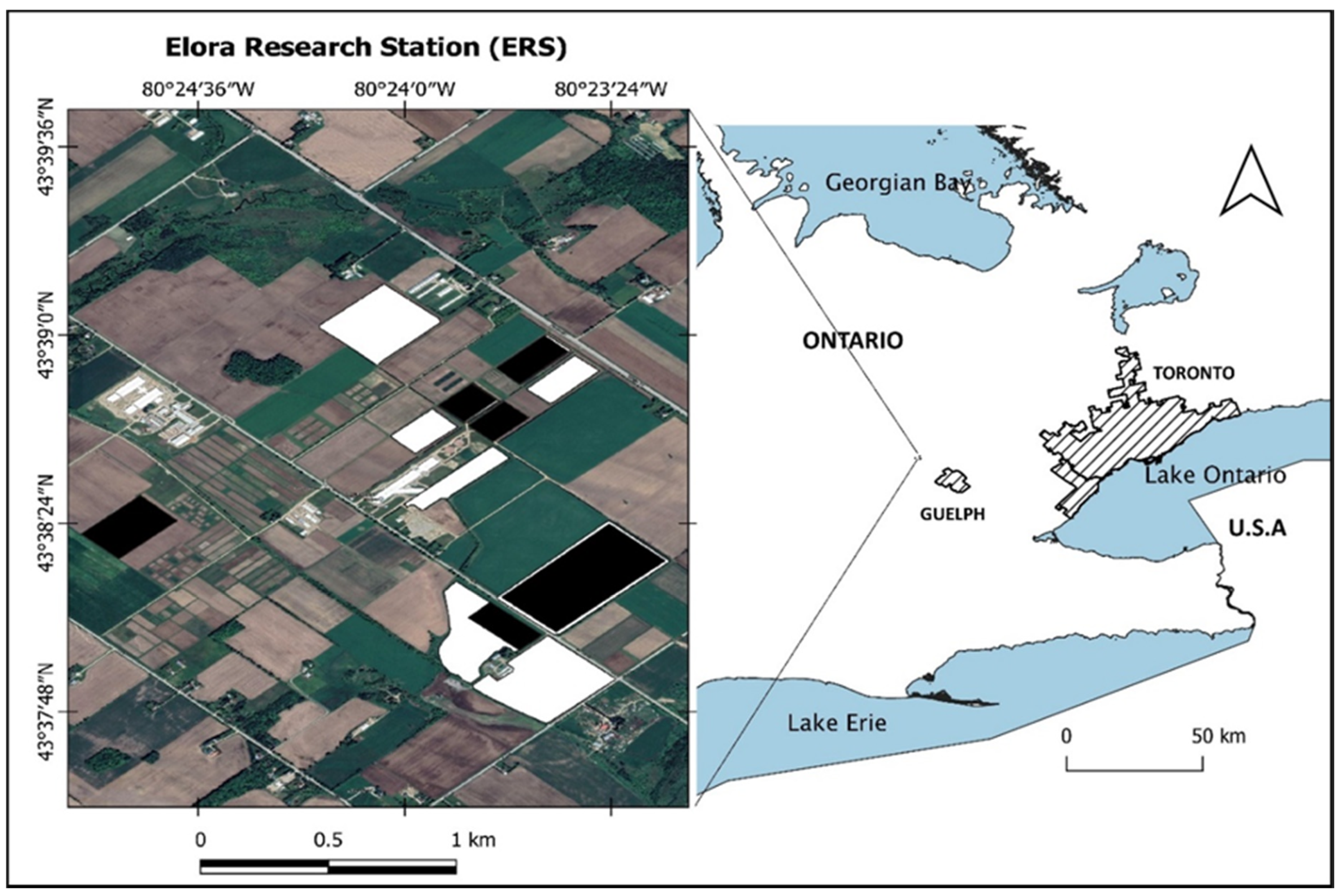
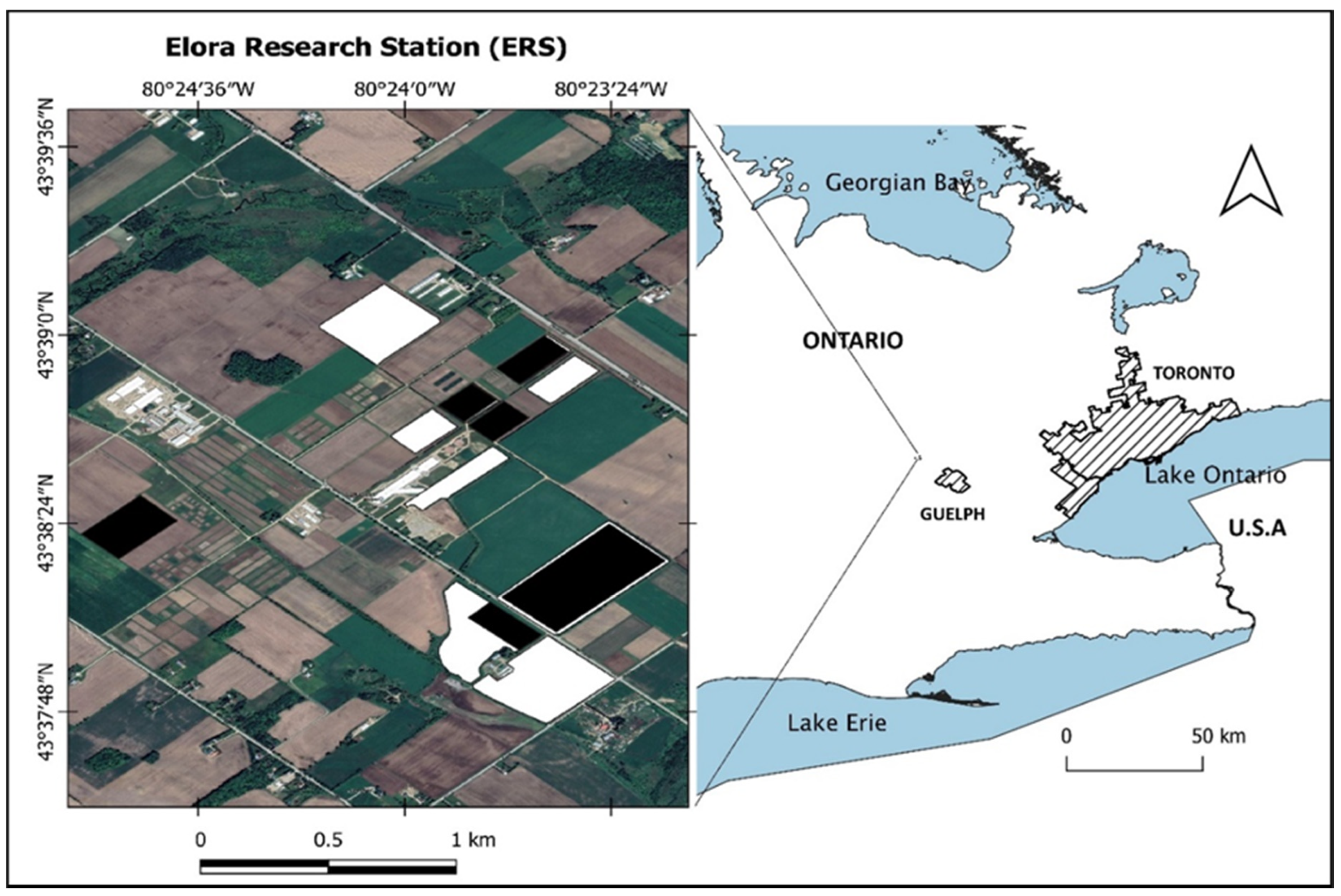
2.1. Site Description
2.2. Surface Roughness Data Collection and Processing
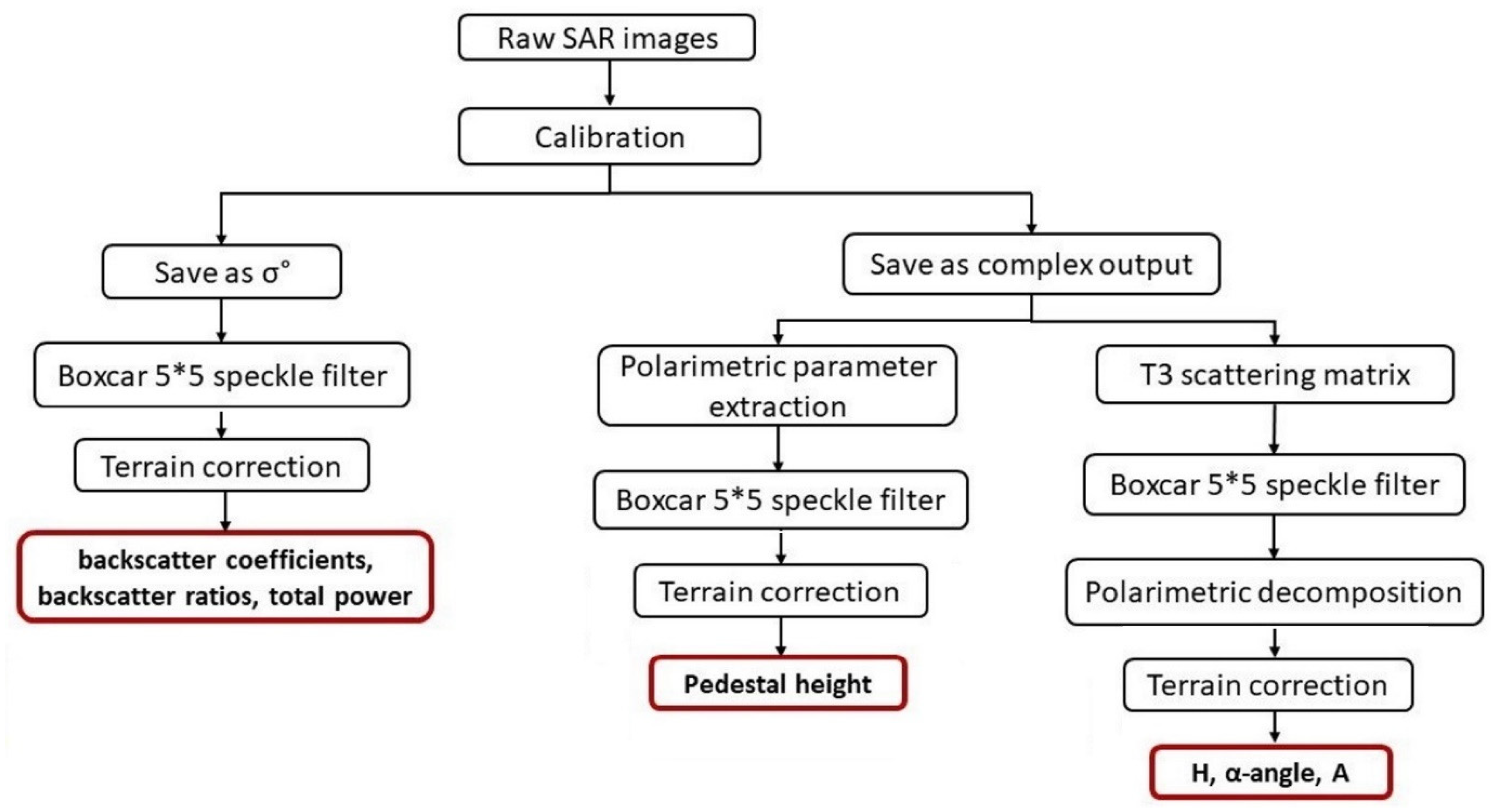
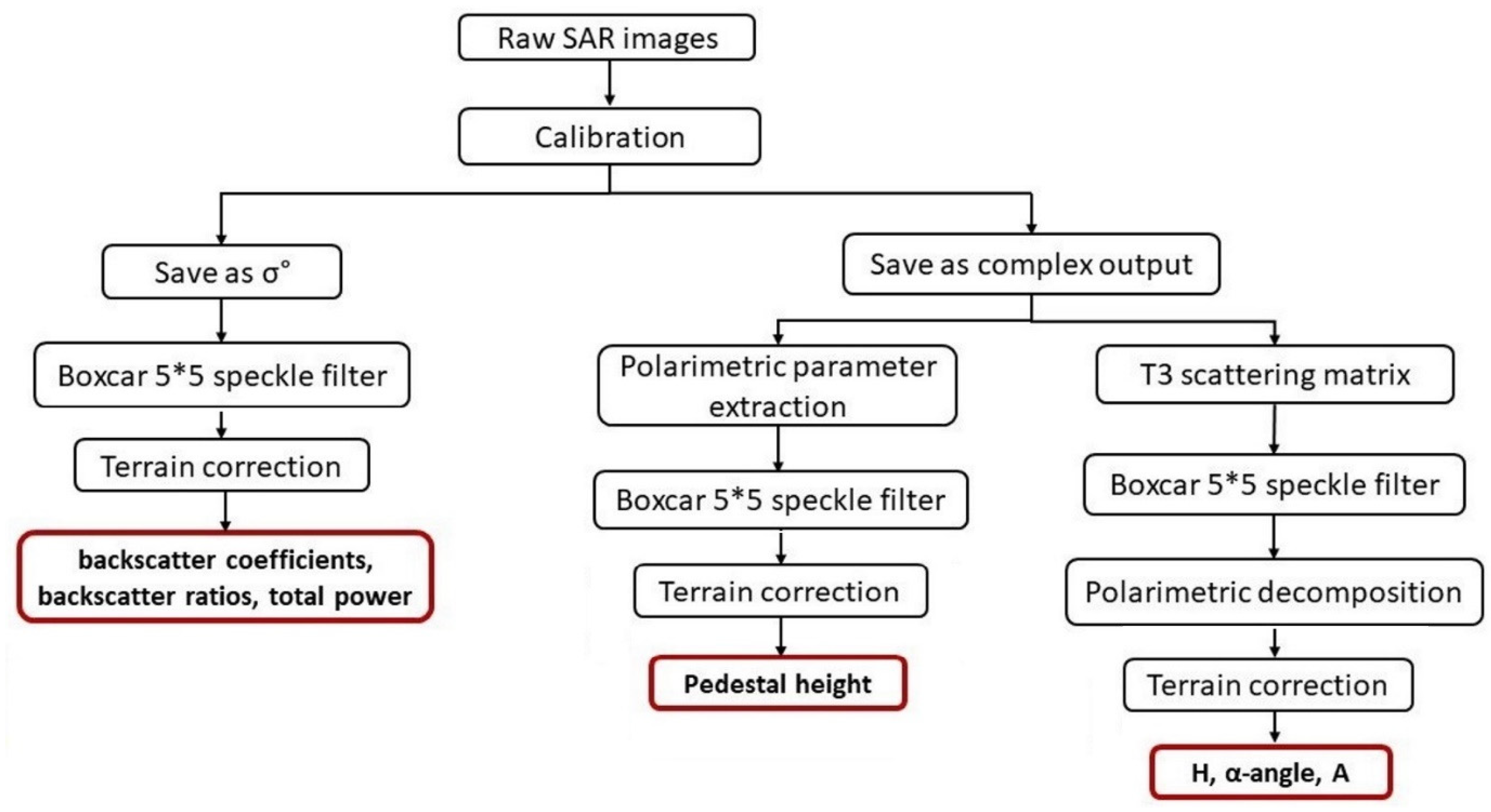
2.3. SAR Image Acquisition and Processing
2.4. Statistical Analysis
3. Results
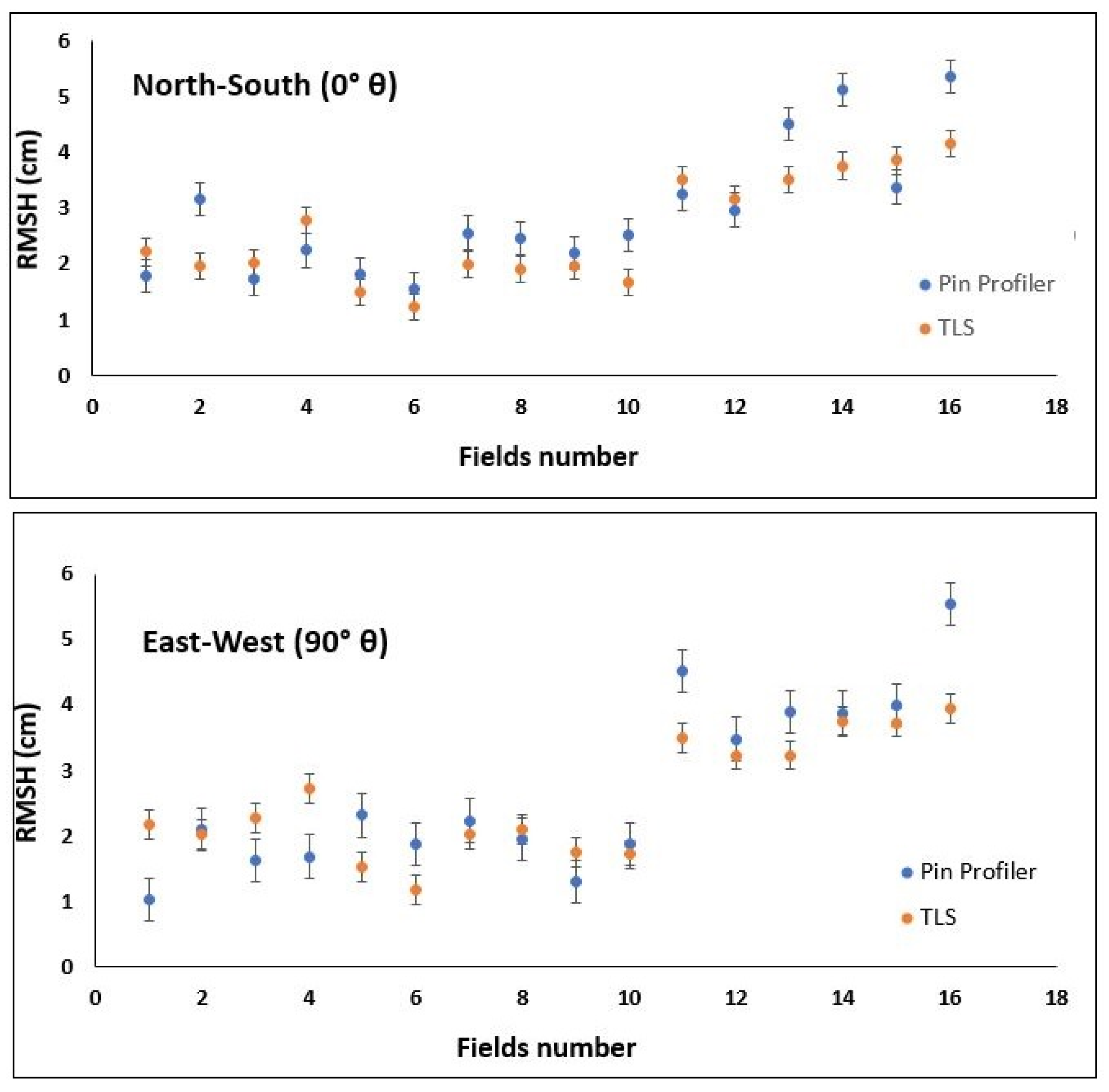
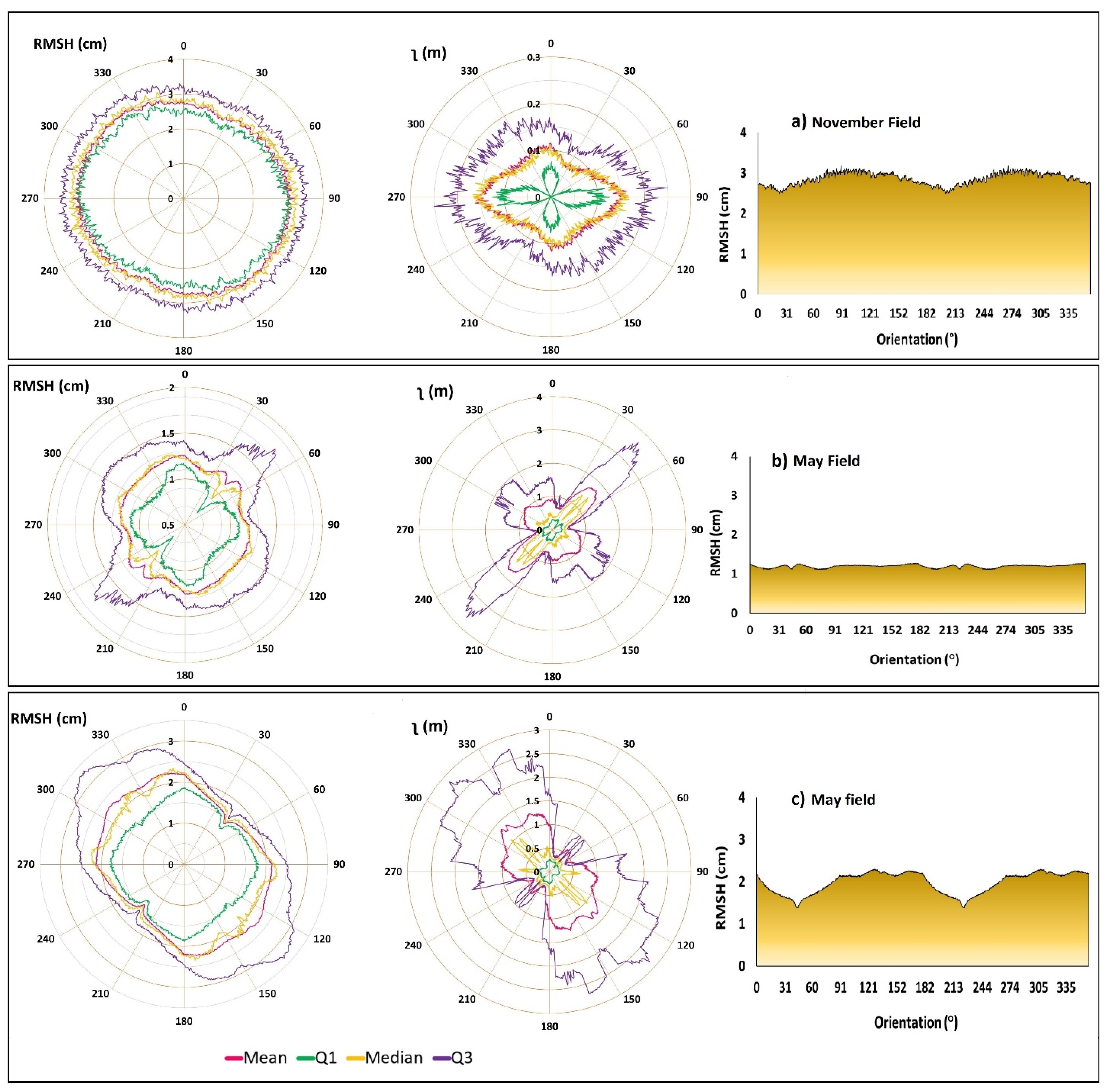
3.1. Surface Roughness Characteristics with Respect to the Orientation
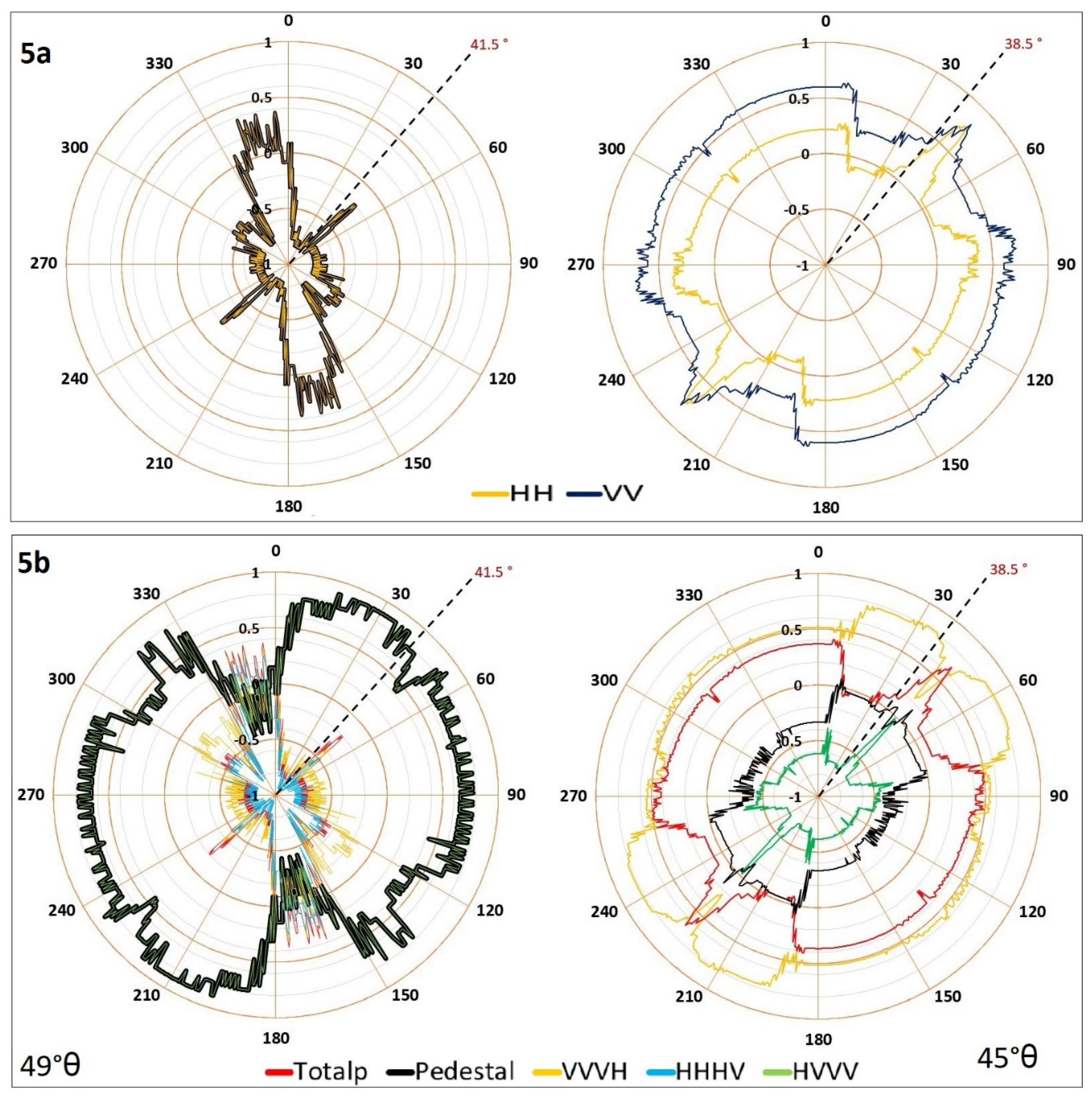
3.2. Sensitivity of RADARSAT-2 Parameters to the Surface Roughness Parameters
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.-B.; Van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S.; Jackson, T.J.; Jaruwatanadilok, S.; West, R.; et al. Surface Soil Moisture Retrieval Using the L-Band Synthetic Aperture Radar Onboard the Soil Moisture Active–Passive Satellite and Evaluation at Core Validation Sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef]
- Zwieback, S.; Berg, A.A. Fine-Scale SAR Soil Moisture Estimation in the Subarctic Tundra. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4898–4912. [Google Scholar] [CrossRef]
- Fung, A.; Li, Z.; Chen, K. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Bryant, R.; Moran, M.S.; Thoma, D.P.; Collins, C.D.H.; Skirvin, S.; Rahman, M.; Slocum, K.; Starks, P.; Bosch, D.; Gonzalez-Dugo, M.P. Measuring Surface Roughness Height to Parameterize Radar Backscatter Models for Retrieval of Surface Soil Moisture. IEEE Geosci. Remote Sens. Lett. 2007, 4, 137–141. [Google Scholar] [CrossRef]
- Mirsoleimani, H.R.; Sahebi, M.R.; Baghdadi, N.; El Hajj, M. Bare Soil Surface Moisture Retrieval from Sentinel-1 SAR Data Based on the Calibrated IEM and Dubois Models Using Neural Networks. Sensors 2019, 19, 3209. [Google Scholar] [CrossRef] [Green Version]
- Guo, P.; Zhao, T.; Shi, J.; Xu, H.; Li, X.; Niu, S. Assessing the active-passive approach at variant incidence angles for microwave brightness temperature downscaling. Int. J. Digit. Earth 2021, 1–21. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Dunbar, R.S.; Chaubell, M.J.; Colliander, A.; Yueh, S.; Jagdhuber, T.; Chen, F.; Crow, W.; O’Neill, P.E.; et al. The SMAP and Copernicus Sentinel 1A/B microwave active-passive high resolution surface soil moisture product. Remote Sens. Environ. 2019, 233, 111380. [Google Scholar] [CrossRef]
- Aubert, M.; Baghdadi, N.N.; Zribi, M.; Ose, K.; El Hajj, M.; Vaudour, E.; Gonzalez-Sosa, E. Toward an Operational Bare Soil Moisture Mapping Using TerraSAR-X Data Acquired Over Agricultural Areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 900–916. [Google Scholar] [CrossRef]
- Merzouki, A.; McNairn, H.; Pacheco, A. Mapping Soil Moisture Using RADARSAT-2 Data and Local Autocorrelation Statistics. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 128–137. [Google Scholar] [CrossRef]
- Sekertekin, A.; Marangoz, A.M.; Abdikan, S. ALOS-2 and Sentinel-1 SAR data sensitivity analysis to surface soil moisture over bare and vegetated agricultural fields. Comput. Electron. Agric. 2020, 171, 105303. [Google Scholar] [CrossRef]
- Baghdadi, N.; Paillou, P.; Grandjean, G.; Dubois, P.; Davidson, M. Relationship between profile length and roughness variables for natural surfaces. Int. J. Remote Sens. 2000, 21, 3375–3381. [Google Scholar] [CrossRef]
- Gupta, V.K.; Jangid, R.A. Microwave Response of Rough Surfaces with Auto-Correlation Functions, RMS Heights and Correlation Lengths Using Active Remote Sensing. IJRSP 2011, 40, 136–146. [Google Scholar]
- Chabot, M.; Lindsay, J.; Rowlandson, T.; Berg, A.A. Comparing the Use of Terrestrial LiDAR Scanners and Pin Profilers for Deriving Agricultural Roughness Statistics. Can. J. Remote Sens. 2018, 44, 153–168. [Google Scholar] [CrossRef]
- Zhixiong, L.; Nan, C.; Perdok, U.; Hoogmoed, W. Characterisation of Soil Profile Roughness. Biosyst. Eng. 2005, 91, 369–377. [Google Scholar] [CrossRef]
- Hajnsek, I.; Pottier, E.; Cloude, S. Inversion of surface parameters from polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 727–744. [Google Scholar] [CrossRef]
- Le Morvan, A.; Zribi, M.; Baghdadi, N.; Chanzy, A. Soil Moisture Profile Effect on Radar Signal Measurement. Sensors 2008, 8, 256–270. [Google Scholar] [CrossRef] [Green Version]
- McNairn, H.; Merzouki, A.; Pacheco, A.; Fitzmaurice, J. Monitoring Soil Moisture to Support Risk Reduction for the Agriculture Sector Using RADARSAT-2. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 824–834. [Google Scholar] [CrossRef]
- Zheng, X.; Li, L.; Chen, S.; Jiang, T.; Li, X.; Zhao, K. Temporal evolution characteristics and prediction methods of spatial correlation function shape of rough soil surfaces. Soil Tillage Res. 2019, 195, 104417. [Google Scholar] [CrossRef]
- Trudel, M.; Charbonneau, F.; Avendano, F.; Leconte, R. Quick Profiler (QuiP): A friendly tool to extract roughness statistical parameters using a needle profiler. Can. J. Remote Sens. 2010, 36, 391–396. [Google Scholar] [CrossRef]
- Jester, W.; Klik, A. Soil surface roughness measurement—Methods, applicability, and surface representation. Catena 2005, 64, 174–192. [Google Scholar] [CrossRef]
- Landy, J.C.; Isleifson, D.; Komarov, A.; Barber, D.G. Parameterization of Centimeter-Scale Sea Ice Surface Roughness Using Terrestrial LiDAR. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1271–1286. [Google Scholar] [CrossRef]
- Moreno, R.G.; Álvarez, M.D.; Alonso, A.T.; Barrington, S.; Requejo, A.S. Tillage and soil type effects on soil surface roughness at semiarid climatic conditions. Soil Tillage Res. 2008, 98, 35–44. [Google Scholar] [CrossRef]
- Gharechelou, S.; Tateishi, R.; Johnson, B.A. A Simple Method for the Parameterization of Surface Roughness from Microwave Remote Sensing. Remote Sens. 2018, 10, 1711. [Google Scholar] [CrossRef] [Green Version]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of soil surface roughness of agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Blaes, X.; Defourny, P. Characterizing Bidimensional Roughness of Agricultural Soil Surfaces for SAR Modeling. IEEE Trans. Geosci. Remote Sens. 2008, 46, 4050–4061. [Google Scholar] [CrossRef]
- Verhoest, N.E.; Lievens, H.; Wagner, W.; Álvarez-Mozos, J.; Moran, M.S.; Mattia, F. On the Soil Roughness Parameterization Problem in Soil Moisture Retrieval of Bare Surfaces from Synthetic Aperture Radar. Sensors 2008, 8, 4213–4248. [Google Scholar] [CrossRef] [Green Version]
- Pollyea, R.M.; Fairley, J.P. Estimating Surface Roughness of Terrestrial Laser Scan Data Using Orthogonal Distance Regression. Geology 2011, 39, 623–626. [Google Scholar] [CrossRef]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of Earth Science Research Using Terrestrial Laser Scanning. Earth-Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef] [Green Version]
- Seidel, D.; Ammer, C. Efficient Measurements of Basal Area in Short Rotation Forests Based on Terrestrial Laser Scanning under Special Consideration of Shadowing. iForest-Biogeosciences For. 2014, 7, 227. [Google Scholar] [CrossRef] [Green Version]
- Roberts, K.C.; Lindsay, J.B.; Berg, A.A. An Analysis of Ground-Point Classifiers for Terrestrial Lidar. Remote Sens. 2019, 11, 1915. [Google Scholar] [CrossRef] [Green Version]
- Rychkov, I.; Brasington, J.; Vericat, D. Computational and Methodological Aspects of Terrestrial Surface Analysis Based on Point Clouds. Comput. Geosci. 2012, 42, 64–70. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. Semi-Empirical Model of the Ensemble-Averaged Differential Mueller Matrix for Microwave Backscattering from Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1348–1355. [Google Scholar] [CrossRef] [Green Version]
- Oh, Y. Quantitative Retrieval of Soil Moisture Content and Surface Roughness from Multipolarized Radar Observations of Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 2004, 42, 596–601. [Google Scholar] [CrossRef]
- Adams, J.R.; Berg, A.A.; McNairn, H.; Merzouki, A. Sensitivity of C-Band SAR Polarimetric Variables to Unvegetated Agricultural Fields. Can. J. Remote Sens. 2013, 39, 1–16. [Google Scholar] [CrossRef]
- Wiseman, G.; McNairn, H.; Homayouni, S.; Shang, J. RADARSAT-2 Polarimetric SAR Response to Crop Biomass for Agricultural Production Monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4461–4471. [Google Scholar] [CrossRef]
- Rakotoarivony, L.; Taconet, O.; Vidal-Madjar, D.; Bellemain, P.; Benallegue, M. Radar Backscattering over Agricultural Bare Soils. J. Electromagn. Waves Appl. 1996, 10, 187–209. [Google Scholar] [CrossRef]
- Martinez-Agirre, A.; Alvarez-Mozos, J.; Lievens, H.; Verhoest, N.E.C.; Gimenez, R. Influence of Surface Roughness Sample Size for C-Band SAR Backscatter Applications on Agricultural Soils. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2300–2304. [Google Scholar] [CrossRef] [Green Version]
- Merzouki, A.; McNairn, H. A Hybrid (Multi-Angle and Multipolarization) Approach to Soil Moisture Retrieval Using the Integral Equation Model: Preparing for the RADARSAT Constellation Mission. Can. J. Remote Sens. 2015, 41, 349–362. [Google Scholar] [CrossRef]
- Baghdadi, N.; Cresson, R.; Pottier, E.; Aubert, M.; Mehrez, M.; Jacome, A.; Benabdallah, S. A Potential Use for the C-Band Polarimetric SAR Parameters to Characterize the Soil Surface Over Bare Agriculture Fields. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3844–3858. [Google Scholar] [CrossRef]
- Baghdadi, N.; Dubois-Fernandez, P.; Dupuis, X.; Zribi, M. Sensitivity of Main Polarimetric Parameters of Multifrequency Polarimetric SAR Data to Soil Moisture and Surface Roughness Over Bare Agricultural Soils. IEEE Geosci. Remote Sens. Lett. 2013, 10, 731–735. [Google Scholar] [CrossRef] [Green Version]
- Agriculture and Agri-Food Canada. The Canadian System of Soil Classification, 3rd ed.; NRC Research Press: Ottawa, ON, Canada, 1998; p. 188. [Google Scholar]
- Lindsay, J.B. Whitebox GAT: A Case Study in Geomorphometric Analysis. Comput. Geosci. 2016, 95, 75–84. [Google Scholar] [CrossRef]
- Boerner, W.; Mott, M.; Luneburg, H.; Livingstone, E.; Brisco, B.; Brown, R.J.; Paterson, J.S. Polarimetry in radar remote sensing: Basic and applied concepts. In Principles and Applications of Imaging Radar, Manual of Remote Sensing, 3rd ed.; Henderson, F.M., Lewis, A.J., Eds.; John Wiley & Sons, Inc.: New York, NY, USA, 1998; Volume 2, pp. 271–357. [Google Scholar]
- Cloude, S.R.; Pottier, E. An Entropy Based Classification Scheme for Land Applications of Polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Zuhlke, M.; Fomferra, N.; Brockmann, C.; Peters, M.; Veci, L.; Malik, J.; Regner, P. SNAP (Sentinel Application Platform) and the ESA Sentinel 3 Toolbox. Sentinel-3 Sci. Workshop 2015, 734, 21. [Google Scholar]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef] [Green Version]
- Ustuner, M.; Sanli, F.B.; Abdikan, S.; Esetlili, M.T.; Bilgin, G. An Application of Roll-Invariant Polarimetric Features for Crop Classification from Multi-Temporal Radarsat-2 Sar Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-1, 451–456. [Google Scholar] [CrossRef]
- Mandal, D.; Vaka, D.S.; Bhogapurapu, N.R.; Vanama, V.S.K.; Kumar, V.; Rao, Y.S.; Bhattacharya, A. Sentinel-1 SLC Preprocessing Workflow for Polarimetric Applications: A Generic Practice for Generating Dual-Pol Covariance Matrix Elements in SNAP S-1 Toolbox. Preprints 2019, 9. [Google Scholar] [CrossRef] [Green Version]
- de Winter, J.C.F.; Gosling, S.D.; Potter, J. Comparing the Pearson and Spearman Correlation Coefficients across Distributions and Sample Sizes: A Tutorial Using Simulations and Empirical Data. Psychol. Methods 2016, 21, 273. [Google Scholar] [CrossRef] [PubMed]
- Van Der Wal, D.; Herman, P.M.; Wielemaker-van Den Dool, A. Characterisation of Surface Roughness and Sediment Texture of Intertidal Flats Using ERS SAR Imagery. Remote Sens. Environ. 2005, 98, 96–109. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Bradley, G.A.; Dobson, M.C. Microwave Backscatter Dependence on Surface Roughness, Soil Moisture, and Soil Texture: Part II-Vegetation-Covered Soil. IEEE Trans. Geosci. Electron. 1979, 17, 33–40. [Google Scholar] [CrossRef]
- Baghdadi, N.; Holah, N.; Zribi, M. Soil Moisture Estimation Using Multi-Incidence and Multi-Polarization ASAR Data. Int. J. Remote Sens. 2006, 27, 1907–1920. [Google Scholar] [CrossRef]
- Holah, N.; Baghdadi, N.; Zribi, M.; Bruand, A.; King, C. Potential of ASAR/ENVISAT for the Characterization of Soil Surface Parameters over Bare Agricultural Fields. Remote Sens. Environ. 2005, 96, 78–86. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, S. Using SAR-Derived Vegetation Descriptors in a Water Cloud Model to Improve Soil Moisture Retrieval. Remote Sens. 2018, 10, 1370. [Google Scholar] [CrossRef] [Green Version]
- Moran, M.S.; Peters-Lidard, C.D.; Watts, J.M.; McElroy, S. Estimating Soil Moisture at the Watershed Scale with Satellite-Based Radar and Land Surface Models. Can. J. Remote Sens. 2004, 30, 22. [Google Scholar] [CrossRef] [Green Version]
- Diaz, J.C.F.; Judge, J.; Slatton, K.C.; Shrestha, R.; Carter, W.E.; Bloomquist, D. Characterization of full surface roughness in agricultural soils using groundbased LiDAR. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4442–4445. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| In Situ Measurement Date | RADAR Acquisition | Acquisition Mode | Orbit (or Pass) | Incidence Angle (°) (Average) | Look Angle (°) (Average) |
|---|---|---|---|---|---|
| 13–14 May 2015 | 16 May 2015 | FQP * | Ascending | 45 | 38.5 |
| 13–14 May 2015 | 17 May 2015 | FQP | Descending | 30 | 26 |
| 16–17 November 2015 | 17 November 2015 | FQP | Ascending | 49 | 41.5 |
| 16–17 November 2015 | 18 November 2015 | FQP | Descending | 24 | 21 |
| Field | Maximum Value | Minimum Value | Difference | |||
|---|---|---|---|---|---|---|
| RMSH | ʅ | RMSH | ʅ | RMSH | ʅ | |
| November | 3.97 | 0.16 | 2.87 | 0.09 | 1.1 | 0.07 |
| May | 2.41 | 0.94 | 1.19 | 0.2 | 1.22 | 0.74 |
| Terrestrial Laser Scanner (Azimuth 90°) | Pin Profiler (East–West Direction) | |||||||
|---|---|---|---|---|---|---|---|---|
| Incidence angle | 24° | 30° | 45° | 49° | 24° | 30° | 45° | 49° |
| Look angle | 21° | 26° | 38.5° | 41.5° | 21° | 26° | 38.5° | 41.5° |
| σ° HH | −0.20 | 0.43 | 0.28 | −0.71 | 0.26 | −0.62 * | −0.66 * | −0.77 * |
| σ° VV | −0.31 | 0.66 * | 0.60 * | −0.71 | 0.09 | −0.79 ** | −0.85 ** | −0.26 |
| σ° HV | −0.20 | 0.40 | −0.13 | −0.37 | 0.26 | −0.57 | −0.23 | −0.26 |
| σ° HH/VV | 0.54 | −0.23 | −0.18 | 0.77 * | 0.43 | 0.41 | 0.15 | 0.82 * |
| σ° HH/HV | −0.31 | −0.20 | 0.57 | −0.77 * | −0.37 | 0.29 | −0.12 | −0.54 |
| σ° VV/VH | −0.31 | −0.12 | 0.53 | −0.60 | −0.37 | 0.16 | −0.11 | −0.66 |
| σ° HV/VV | 0.31 | 0.22 | −0.48 | 0.66 | 0.37 | −0.39 | 0.15 | 0.60 |
| Pedestal height | 0.60 | −0.22 | −0.42 | 0.66 | 0.37 | −0.1 | 0.28 | 0.60 |
| Total power | −0.37 | 0.55 | 0.42 | −0.71 | 0.14 | −0.71 * | −0.77 ** | −0.77 * |
| H | 0.31 | −0.48 | −0.47 | 0.60 | 0.37 | 0.15 | 0.38 | 0.71 |
| A | 0.03 | −0.38 | −0.42 | −0.03 | −0.09 | 0.31 | 0.75 ** | −0.09 |
| α-angle | 0.60 | −0.48 | −0.32 | 0.60 | 0.31 | 0.15 | 0.15 | 0.71 |
| Terrestrial Laser Scanner (azimuth 0°) | Pin profiler (North–South direction) | |||||||
| σ° HH | −0.60 | 0.33 | 0.22 | 0.09 | −0.54 | −0.45 | −0.63 * | −0.09 |
| σ° VV | −0.88 ** | 0.55 | 0.60 * | 0.09 | −0.37 | −0.40 | −0.45 | −0.31 |
| σ° HV | −0.20 | 0.43 | −0.17 | 0.26 | 0.03 | −0.13 | −0.65 * | −0.31 |
| σ° HH/VV | 0.77 * | −0.30 | −0.40 | 0.37 | 0.71 | 0.00 | −0.12 | −0.31 |
| σ° HH/HV | −0.71 | −0.27 | 0.53 | −0.14 | −0.77 * | 0.00 | 0.38 | 0.03 |
| σ° VV/VH | −0.71 | −0.18 | 0.52 | −0.03 | −0.77 * | −0.07 | 0.45 | 0.26 |
| σ° HV/VV | 0.71 | 0.27 | −0.61 * | −0.09 | 0.77 * | 0.02 | −0.38 | 0.37 |
| Pedestal height | 0.66 | −0.23 | −0.33 | −0.09 | 0.77 * | 0.08 | 0.08 | −0.31 |
| Total power | −0.77 * | 0.50 | 0.37 | 0.09 | −0.43 | −0.28 | −0.71 * | −0.09 |
| H | 0.71 | −0.48 | −0.35 | −0.20 | 0.77 * | 0.13 | 0.18 | −0.14 |
| A | 0.60 | −0.38 | −0.38 | −0.14 | 0.37 | 0.12 | 0.48 | 0.37 |
| α-angle | 0.88 ** | −0.48 | −0.20 | −0.20 | 0.54 | 0.13 | −0.05 | −0.14 |
| Terrestrial Laser Scanner (Look Angle) | ||||
|---|---|---|---|---|
| Incidence angle | 24° | 30° | 45° | 49° |
| Look angle | 21° | 26° | 38.5° | 41.5° |
| σ° HH | −0.09 | 0.13 | 0.13 | −0.77 * |
| σ° VV | −0.20 | 0.30 | 0.42 | −0.77 * |
| σ° HV | −0.37 | 0.33 | −0.33 | −0.43 |
| σ° HH/VV | 0.26 | 0.00 | −0.10 | 0.66 |
| σ° HH/HV | −0.03 | −0.22 | 0.66 * | −0.88 ** |
| σ° VV/VH | −0.03 | −0.13 | 0.76 ** | −0.66 |
| σ° HV/VV | 0.03 | 0.27 | −0.63 * | 0.77 * |
| Pedestal height | 0.31 | −0.08 | 0.00 | 0.77 * |
| Total power | −0.26 | 0.30 | 0.13 | −0.77 * |
| H | 0.03 | −0.23 | 0.02 | 0.71 |
| A | 0.09 | −0.23 | 0.07 | 0.14 |
| α-angle | 0.37 | −0.23 | 0 | 0.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alijani, Z.; Lindsay, J.; Chabot, M.; Rowlandson, T.; Berg, A. Sensitivity of C-Band SAR Polarimetric Variables to the Directionality of Surface Roughness Parameters. Remote Sens. 2021, 13, 2210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112210
Alijani Z, Lindsay J, Chabot M, Rowlandson T, Berg A. Sensitivity of C-Band SAR Polarimetric Variables to the Directionality of Surface Roughness Parameters. Remote Sensing. 2021; 13(11):2210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112210
Chicago/Turabian StyleAlijani, Zohreh, John Lindsay, Melanie Chabot, Tracy Rowlandson, and Aaron Berg. 2021. "Sensitivity of C-Band SAR Polarimetric Variables to the Directionality of Surface Roughness Parameters" Remote Sensing 13, no. 11: 2210. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13112210