
Fast Unsupervised Multi-Scale Characterization of Urban Landscapes Based on Earth Observation Data

 , , , ,
, , , ,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area and Satellite Imagery
2.2. Method
- the urban footprint (macro-scale)
- the urban units scale (meso-scale)
- the object scale such as buildings (micro-scale)
2.3. FOTOTEX Algorithm
- Step 1: Image partitioning (Figure 3a)
- Step 2: Spectral analysis by Fourier transform and R-spectra computing (Figure 3b)
- Step 3: Texture ordination (Figure 3c,d)
2.4. Influence of Technical Parameters
3. Results
3.1. Macro-Scale: Urban Footprint
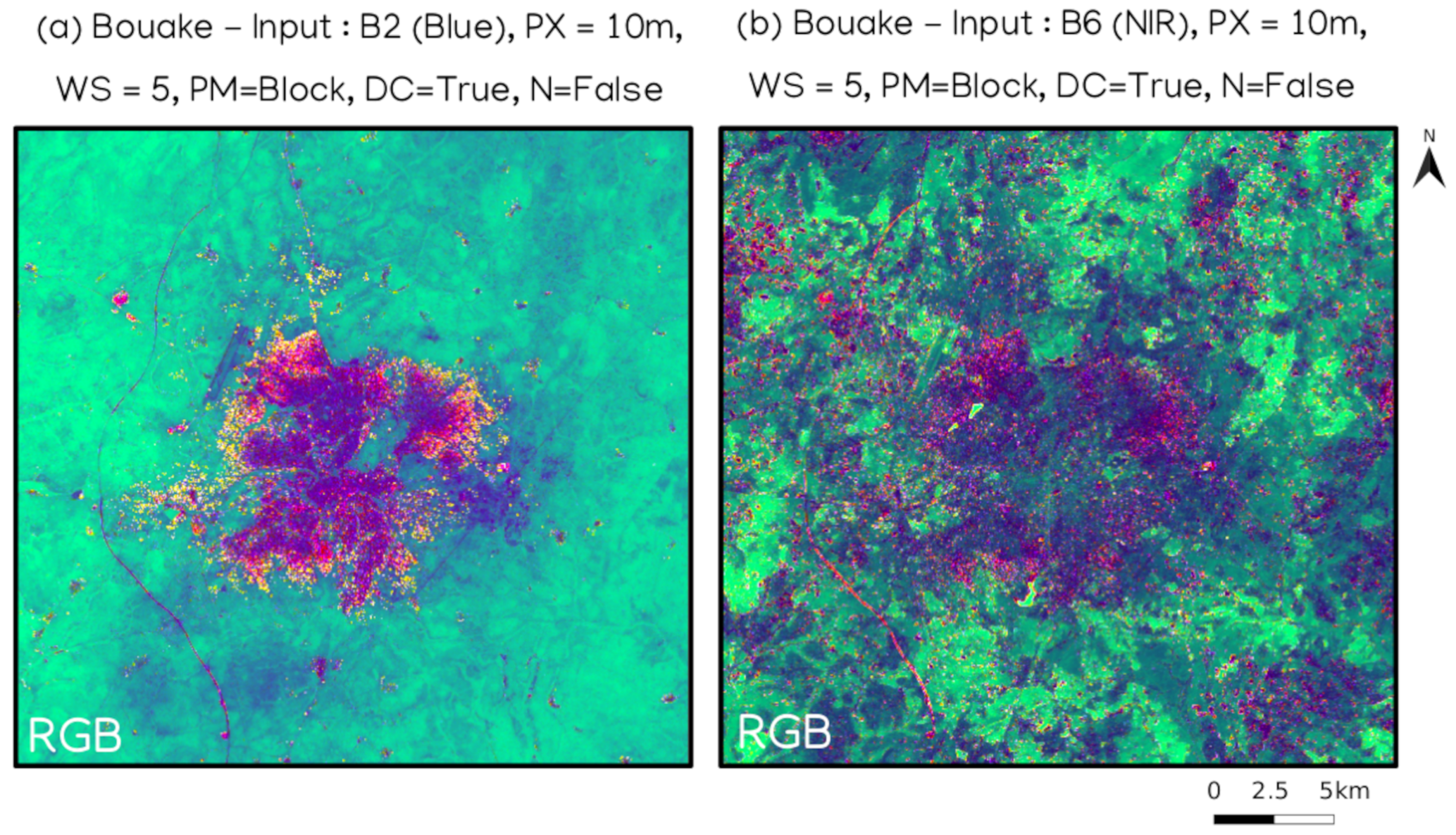
3.1.1. Influence of Spectral Bands as Input
3.1.2. Influence of Partitioning Method
3.1.3. Influence of Window Size
3.1.4. Influence of Keeping the DC Component
3.1.5. Influence of the Normalization
3.1.6. Extraction of the Urban Footprint over Optimal Configuration
3.2. Meso-Scale: Urban Units
3.2.1. Influence of Partitioning Method
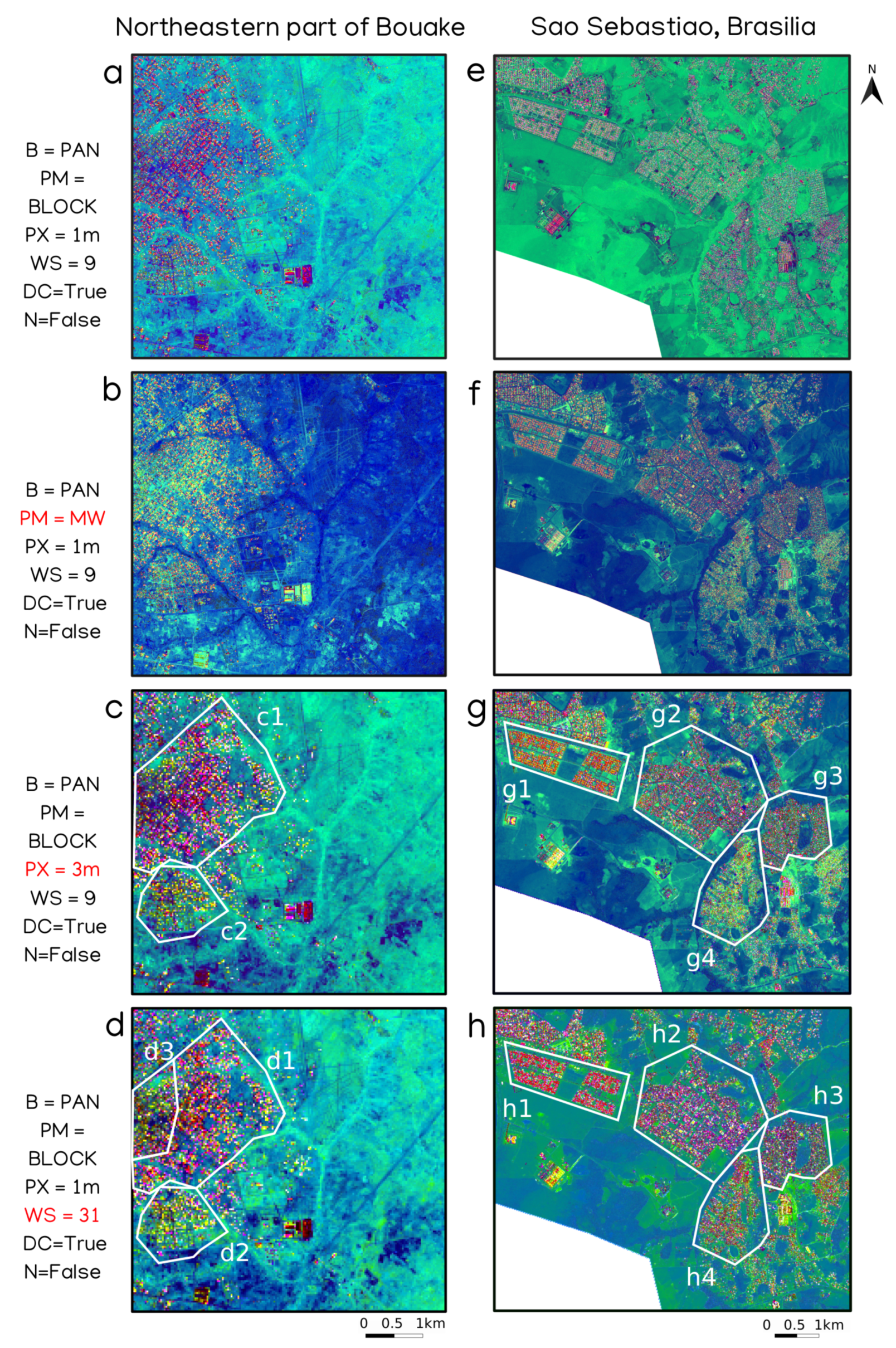
3.2.2. Influence of the Pixel Size
3.2.3. Influence of Window Size
3.2.4. Influence of DC Component and Normalization
3.2.5. Comparison of Urban Units Extracted from FOTOTEX with Environmental Variables
3.3. Micro-Scale: Buildings Detection
3.3.1. Influence of Parameters
3.3.2. Extraction of Urban Objects
4. Discussion
4.1. Recommended Parameters for the Study of the Urban Landscapes at Three Spatial Scales
4.1.1. Macro-Scale
4.1.2. Meso-Scale
4.1.3. Micro-Scale
4.1.4. Global Recommendation
4.2. The Contribution of the Method to Characterize Urban Landscapes at Three Scales
- we provide an open algorithm implementing a fully unsupervised procedure to characterize urban areas at three scales. This is particularly important to work on areas where training data are missing.
- for all the analysis scales, our methodological framework relies on single date images, strongly reducing the need for downloading and storing large volumes of satellite images
- using single images, the computational power required to run the algorithm is strongly reduced.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jensen, J.R.; Cowen, D.C. Remote Sensing of Urban/Suburban Infrastructure and Socio-Economic Attributes. In The Map Reader; John Wiley & Sons, Ltd.: Chichester, UK, 1999; pp. 153–163. [Google Scholar] [CrossRef]
- Maktav, D.; Erbek, F.S.; Jürgens, C. Remote sensing of urban areas. Int. J. Remote Sens. 2005, 26, 655–659. [Google Scholar] [CrossRef]
- Weeks, J.R. Defining Urban Areas. In Remote Sensing of Urban and Suburban Areas; Rashed, T., Jürgens, C., Eds.; Remote Sensing and Digital Image Processing; Springer Netherlands: Dordrecht, The Netherlands, 2010; pp. 33–45. [Google Scholar] [CrossRef]
- Quattrochi, D.A.; Goodchild, M.F. Scale in Remote Sensing and GIS; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Gamba, P.; Herold, M. Global Mapping Of Human Settlement: Experiences, Datasets, and Prospects: Book Reviews. Photogramm. Rec. 2009, 25, 205–207. [Google Scholar] [CrossRef]
- Weng, Q. Remote Sensing and GIS Integration: Theories, Methods, and Applications; OCLC: 318409264; McGraw-Hill: New York, NY, USA, 2010. [Google Scholar]
- Zhu, Z.; Zhou, Y.; Seto, K.C.; Stokes, E.C.; Deng, C.; Pickett, S.T.A.; Taubenböck, H. Understanding an urbanizing planet: Strategic directions for remote sensing. Remote Sens. Environ. 2019, 228, 164–182. [Google Scholar] [CrossRef]
- Li, X.; Gong, P.; Zhou, Y.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Xiao, Y.; Xu, B.; Yang, J.; et al. Mapping global urban boundaries from the global artificial impervious area (GAIA) data. Environ. Res. Lett. 2020, 15, 094044. [Google Scholar] [CrossRef]
- Reba, M.; Seto, K.C. A systematic review and assessment of algorithms to detect, characterize, and monitor urban land change. Remote Sens. Environ. 2020, 242, 111739. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wu, C.; Chen, X.; Gao, Y.; Xie, S.; Zhang, B. Development of a global 30 m impervious surface map using multisource and multitemporal remote sensing datasets with the Google Earth Engine platform. Earth Syst. Sci. Data 2020, 12, 1625–1648. [Google Scholar] [CrossRef]
- Pesaresi, M.; Blaes, X.; Ehrlich, D.; Ferri, S.; Gueguen, L.; Halkia, M.; Kauffmann, M.; Kemper, T.; Lu, L.; Marin-Herrera, M.A.; et al. A Global Human Settlement Layer From Optical HR/VHR RS Data: Concept and First Results. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2102–2131. [Google Scholar] [CrossRef]
- Pesaresi, M.; Corbane, C.; Julea, A.; Florczyk, A.J.; Syrris, V.; Soille, P. Assessment of the Added-Value of Sentinel-2 for Detecting Built-up Areas. Remote Sens. 2016, 8, 299. [Google Scholar] [CrossRef] [Green Version]
- Pesaresi, M.; Syrris, V.; Julea, A. A New Method for Earth Observation Data Analytics Based on Symbolic Machine Learning. Remote Sens. 2016, 8, 399. [Google Scholar] [CrossRef] [Green Version]
- Corbane, C.; Pesaresi, M.; Politis, P.; Syrris, V.; Florczyk, A.J.; Soille, P.; Maffenini, L.; Burger, A.; Vasilev, V.; Rodriguez, D.; et al. Big earth data analytics on Sentinel-1 and Landsat imagery in support to global human settlements mapping. Big Earth Data 2017, 1, 118–144. [Google Scholar] [CrossRef] [Green Version]
- Corbane, C.; Lemoine, G.; Pesaresi, M.; Kemper, T.; Sabo, F.; Ferri, S.; Syrris, V. Enhanced automatic detection of human settlements using Sentinel-1 interferometric coherence. Int. J. Remote Sens. 2018, 39, 842–853. [Google Scholar] [CrossRef]
- Marconcini, M.; Metz-Marconcini, A.; Üreyen, S.; Palacios-Lopez, D.; Hanke, W.; Bachofer, F.; Zeidler, J.; Esch, T.; Gorelick, N.; Kakarla, A.; et al. Outlining where humans live - the world settlement footprint 2015. Sci. Data 2015, 20, 242. [Google Scholar]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Huang, C.; de Colstoun, E.B.; Tilton, J.; Tan, B. Global Human Built-up and Settlement Extent (HBASE) Dataset From Landsat; NASA Socioeconomic Data and Applications Center (SEDAC): Palisades, NY, USA, 2017. [Google Scholar] [CrossRef]
- Felbier, A.; Esch, T.; Heldens, W.; Marconcini, M.; Zeidler, J.; Roth, A.; Klotz, M.; Wurm, M.; Taubenböck, H. The global urban footprint—Processing status and cross comparison to existing human settlement products. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 4816–4819. [Google Scholar] [CrossRef]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking new ground in mapping human settlements from space—The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar] [CrossRef] [Green Version]
- Lehner, A.; Naeimi, V.; Steinnocher, K. Sentinel-1 for Urban Areas—Comparison between Automatically Derived Settlement Layers from Sentinel-1 Data and Copernicus High Resolution Information Layers. In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management, Porto, Portugal, 27–28 April 2017; SCITEPRESS—Science and Technology Publications: Porto, Portugal, 2017; pp. 43–49. [Google Scholar] [CrossRef]
- Puissant, A.; Hirsch, J.; Weber, C. The utility of texture analysis to improve per-pixel classification for high to very high spatial resolution imagery. Int. J. Remote Sens. 2005, 26, 733–745. [Google Scholar] [CrossRef]
- Ouma, Y.; Tateishi, R.; Sri-Sumantyo, J. Urban features recognition and extraction from very-high resolution multi-spectral satellite imagery: A micro–macro texture determination and integration framework. IET Image Process. 2010, 4, 235. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Lang, M.; Alleaume, S.; Luque, S.; Baghdadi, N.; Féret, J.B. Monitoring and Characterizing Heterogeneous Mediterranean Landscapes with Continuous Textural Indices Based on VHSR Imagery. Remote Sens. 2018, 10, 868. [Google Scholar] [CrossRef] [Green Version]
- Dell’Acqua, F.; Gamba, P. Texture-based characterization of urban environments on satellite SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 153–159. [Google Scholar] [CrossRef]
- Corbane, C.; Faure, J.F.; Baghdadi, N.; Villeneuve, N.; Petit, M. Rapid Urban Mapping Using SAR/Optical Imagery Synergy. Sensors 2008, 8, 7125–7143. [Google Scholar] [CrossRef]
- Esch, T.; Marconcini, M.; Felbier, A.; Roth, A.; Heldens, W.; Huber, M.; Schwinger, M.; Taubenböck, H.; Müller, A.; Dech, S. Urban Footprint Processor-Fully Automated Processing Chain Generating Settlement Masks From Global Data of the TanDEM-X Mission. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1617–1621. [Google Scholar] [CrossRef] [Green Version]
- Ansari, R.A.; Buddhiraju, K.M.; Malhotra, R. Urban change detection analysis utilizing multiresolution texture features from polarimetric SAR images. Remote Sens. Appl. Soc. Environ. 2020, 20, 100418. [Google Scholar] [CrossRef]
- Florczyk, A.J.; Ferri, S.; Syrris, V.; Kemper, T.; Halkia, M.; Soille, P.; Pesaresi, M. A New European Settlement Map From Optical Remotely Sensed Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1978–1992. [Google Scholar] [CrossRef]
- Forget, Y.; Shimoni, M.; Gilbert, M.; Linard, C. Mapping 20 Years of Urban Expansion in 45 Urban Areas of Sub-Saharan Africa. Remote Sens. 2021, 13, 525. [Google Scholar] [CrossRef]
- Sampson, R.J.; Morenoff, J.D.; Gannon-Rowley, T. Assessing “Neighborhood Effects”: Social Processes and New Directions in Research. Annu. Rev. Sociol. 2002, 28, 443–478. [Google Scholar] [CrossRef] [Green Version]
- Stewart, I.D.; Oke, T.R. Local Climate Zones for Urban Temperature Studies. Bull. Am. Meteorol. Soc. 2012, 93, 1879–1900. [Google Scholar] [CrossRef]
- Taubenbock, H.; Pengler, I.; Schwaiger, B.; Cypra, S.; Hiete, M.; Roth, A. A multi-scale urban analysis of the Hyderabad metropolitan area using remote sensing and GIS. In Proceedings of the 2007 Urban Remote Sensing Joint Event, Paris, France, 11–13 April 2007; pp. 1–6, ISBN 2334-0932. [Google Scholar] [CrossRef]
- Krayenhoff, E.S.; Voogt, J.A. Daytime Thermal Anisotropy of Urban Neighbourhoods: Morphological Causation. Remote Sens. 2016, 8, 108. [Google Scholar] [CrossRef] [Green Version]
- Ejiagha, I.R.; Ahmed, M.R.; Hassan, Q.K.; Dewan, A.; Gupta, A.; Rangelova, E. Use of Remote Sensing in Comprehending the Influence of Urban Landscape’s Composition and Configuration on Land Surface Temperature at Neighbourhood Scale. Remote Sens. 2020, 12, 2508. [Google Scholar] [CrossRef]
- Stokes, E.C.; Seto, K.C. Characterizing and measuring urban landscapes for sustainability. Environ. Res. Lett. 2019, 14, 045002. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Gamba, P. Discriminating urban environments using multiscale texture and multiple SAR images. Int. J. Remote Sens. 2006, 27, 3797–3812. [Google Scholar] [CrossRef]
- Zhai, W.; Shen, H.; Huang, C.; Pei, W. Fusion of polarimetric and texture information for urban building extraction from fully polarimetric SAR imagery. Remote Sens. Lett. 2016, 7, 31–40. [Google Scholar] [CrossRef]
- Shao, Z.; Tang, P.; Wang, Z.; Saleem, N.; Yam, S.; Sommai, C. BRRNet: A Fully Convolutional Neural Network for Automatic Building Extraction From High-Resolution Remote Sensing Images. Remote Sens. 2020, 12, 1050. [Google Scholar] [CrossRef] [Green Version]
- Pandey, G.; Sharma, V.K.; Chaudhary, P.; Chowdary, V.M.; Udayraj. Integration of Texture and Spectral Response with AI Techniques for Buildings Footprint Identification Using High-Resolution Satellite Images. J. Indian Soc. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Melchiorri, M.; Florczyk, A.J.; Freire, S.; Schiavina, M.; Pesaresi, M.; Kemper, T. Unveiling 25 Years of Planetary Urbanization with Remote Sensing: Perspectives from the Global Human Settlement Layer. Remote Sens. 2018, 10, 768. [Google Scholar] [CrossRef] [Green Version]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Couteron, P.; Barbier, N.; Gautier, D. Textural ordination based on Fourier spectral decomposition: A method to analyze and compare landscape patterns. Landsc. Ecol. 2006, 21, 555–567. [Google Scholar] [CrossRef]
- Proisy, C.; Couteron, P.; Fromard, F. Predicting and mapping mangrove biomass from canopy grain analysis using Fourier-based textural ordination of IKONOS images. Remote Sens. Environ. 2007, 109, 379–392. [Google Scholar] [CrossRef]
- Lang, M. Caractérisation de l’hétérogénéité Spatiale de Milieux Naturels à Partir d’imagerie Optique Très Haute Résolution Spatiale: Cas d’application aux Milieux Méditerranéens de Garrigue. Ph.D. Thesis, AgroParisTech, Paris, France, 2019. [Google Scholar]
- Zhou, W.; Cadenasso, M.L.; Schwarz, K.; Pickett, S.T.A. Quantifying Spatial Heterogeneity in Urban Landscapes: Integrating Visual Interpretation and Object-Based Classification. Remote Sens. 2014, 6, 3369–3386. [Google Scholar] [CrossRef] [Green Version]
- Serra, M.; Psarra, S.; O’Brien, J. Social and Physical Characterization of Urban Contexts: Techniques and Methods for Quantification, Classification and Purposive Sampling. Urban Plan. 2018, 3, 58–74. [Google Scholar] [CrossRef]
- Qian, Y.; Zhou, W.; Pickett, S.T.A.; Yu, W.; Xiong, D.; Wang, W.; Jing, C. Integrating structure and function: Mapping the hierarchical spatial heterogeneity of urban landscapes. Ecol. Process. 2020, 9, 59. [Google Scholar] [CrossRef]
- Mugglestone, M.A.; Renshaw, E. Detection of geological lineations on aerial photographs using two-dimensional spectral analysis. Comput. Geosci. 1998, 24, 771–784. [Google Scholar] [CrossRef]
- Couteron, P. Quantifying change in patterned semi-arid vegetation by Fourier analysis of digitized aerial photographs. Int. J. Remote Sens. 2002, 23, 3407–3425. [Google Scholar] [CrossRef]
- Caloz, R.; Collet, C. Précis de Télédétection: Traitements Numériques d’Images de Télédétection; Google-Books-ID: 9bepLPU5udQC; PUQ: Quebec City, QC, Canada, 2001. [Google Scholar]
- Lang, M.; Alleaume, S.; Luque, S.; Baghdadi, N.; Feret, J.B. Landscape Structure Estimation using Fourier-Based Textural Ordination of High Resolution Airborne Optical Image. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6600–6603. [Google Scholar] [CrossRef]
- Nunes, B.F.; Bandeira, L. Brasília: L’urbanité Dans une Ville Nouvelle. Espac. Soc. 2004, 93–111. [Google Scholar]
- Zhou, G. Detecting the Socioeconomic Conditions of Urban Neighborhoods through Wavelet Analysis of Remotely Sensed Imagery. Ph.D. Thesis, Louisiana State University, Baton Rouge, Louisiana, 2006; p. 172. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Choice |
|---|---|
| Spectral band | Depends on the satellite image |
| Partitioning method (PM) | “Block” or “Moving window” |
| Pixel size (PX) | Any |
| Window size (in pixel) (WS) | Any positive odd number |
| Keep DC component (DC) | True or False |
| Normalize (N) | Normalize or non-normalized |
| Bouake (Scene of 2801 × 2751 Pixels) | Brasilia (Scene of 9306 × 6192 Pixels) | |
|---|---|---|
| Block Method | 25 s | 2 min |
| Moving window method | 1 min | 9 min |
| Moving window method (HDF5 and incremental PCA) | 3 min | 15 min |
| FOTOTEX | GHSL | GUF | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Input Information | MW WS = 5 (10 m) | Block WS = 5 (50 m) | Block WS = 5 (310 m) | 10 m | 50 m | 310 m | 10 m | 50 m | 310 m |
| Surface of the urban foorptint of Brasilia in km | 457.2 | 453.8 | 663.3 | 338.9 | 338.5 | 342.5 | 385.2 | 385.6 | 391.8 |
| Surface of the urban foorptint of Bouake in km | 106.4 | 106.7 | 157.2 | 34.7 | 34.7 | 34.9 | 38.5 | 38.5 | 39.5 |
| Sao Sebastiao | Urban Units | Mean PC1 | Mean PC2 | Mean PC3 | Percentage of Built Area | Percentage of Vegetated Area |
| 1 | 7.13 | −0.09 | 0.80 | 14.84 | 36.19 | |
| 2 | 3.98 | 0.13 | 0.54 | 32.20 | 29.37 | |
| 3 | 3.62 | 0.37 | 0.00 | 38.87 | 33.51 | |
| 4 | 3.85 | 0.18 | 0.06 | 18.35 | 56.07 | |
| 5 | 3.79 | 0.89 | 0.20 | 10.30 | 59.69 | |
| Northeastern part of Bouake | Urban Units | Mean PC1 | Mean PC2 | Mean PC3 | Percentage of Built Area | Percentage of Vegetated Area |
| 1 | 6.24 | −0.34 | 0.00 | 10.31 | 70.17 | |
| 2 | 8.44 | −0.37 | −0.09 | 7.64 | 76.55 | |
| 3 | 5.47 | 0.02 | −0.52 | 13.15 | 70.49 | |
| 4 | 6.29 | −0.48 | −0.27 | 12.00 | 72.52 | |
| 5 | 6.54 | −2.59 | −1.63 | 44.97 | 39.89 |
| Parameters | Macro Scale | Meso scale | Micro scale |
|---|---|---|---|
| Partitioning Method (PM) | Block | Block | Block |
| Pixel Size (PX) | 10 m | Between 1 m and 3 m | Under 1 m |
| Window Size (in pixel) (WS) | To be adapted | To be adapted (better result with larger window) | To be adapted |
| Keep DC Component (DC) | True | True | True |
| Normalize (N) | Non-normalized | Non-normalized | Non-normalized |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teillet, C.; Pillot, B.; Catry, T.; Demagistri, L.; Lyszczarz, D.; Lang, M.; Couteron, P.; Barbier, N.; Adou Kouassi, A.; Gunther, Q.; et al. Fast Unsupervised Multi-Scale Characterization of Urban Landscapes Based on Earth Observation Data. Remote Sens. 2021, 13, 2398. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122398
Teillet C, Pillot B, Catry T, Demagistri L, Lyszczarz D, Lang M, Couteron P, Barbier N, Adou Kouassi A, Gunther Q, et al. Fast Unsupervised Multi-Scale Characterization of Urban Landscapes Based on Earth Observation Data. Remote Sensing. 2021; 13(12):2398. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122398
Chicago/Turabian StyleTeillet, Claire, Benjamin Pillot, Thibault Catry, Laurent Demagistri, Dominique Lyszczarz, Marc Lang, Pierre Couteron, Nicolas Barbier, Arsène Adou Kouassi, Quentin Gunther, and et al. 2021. "Fast Unsupervised Multi-Scale Characterization of Urban Landscapes Based on Earth Observation Data" Remote Sensing 13, no. 12: 2398. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13122398