
NaturaSat—A Software Tool for Identification, Monitoring and Evaluation of Habitats by Remote Sensing Techniques


 , , , and
, , , and
Abstract
:1. Introduction
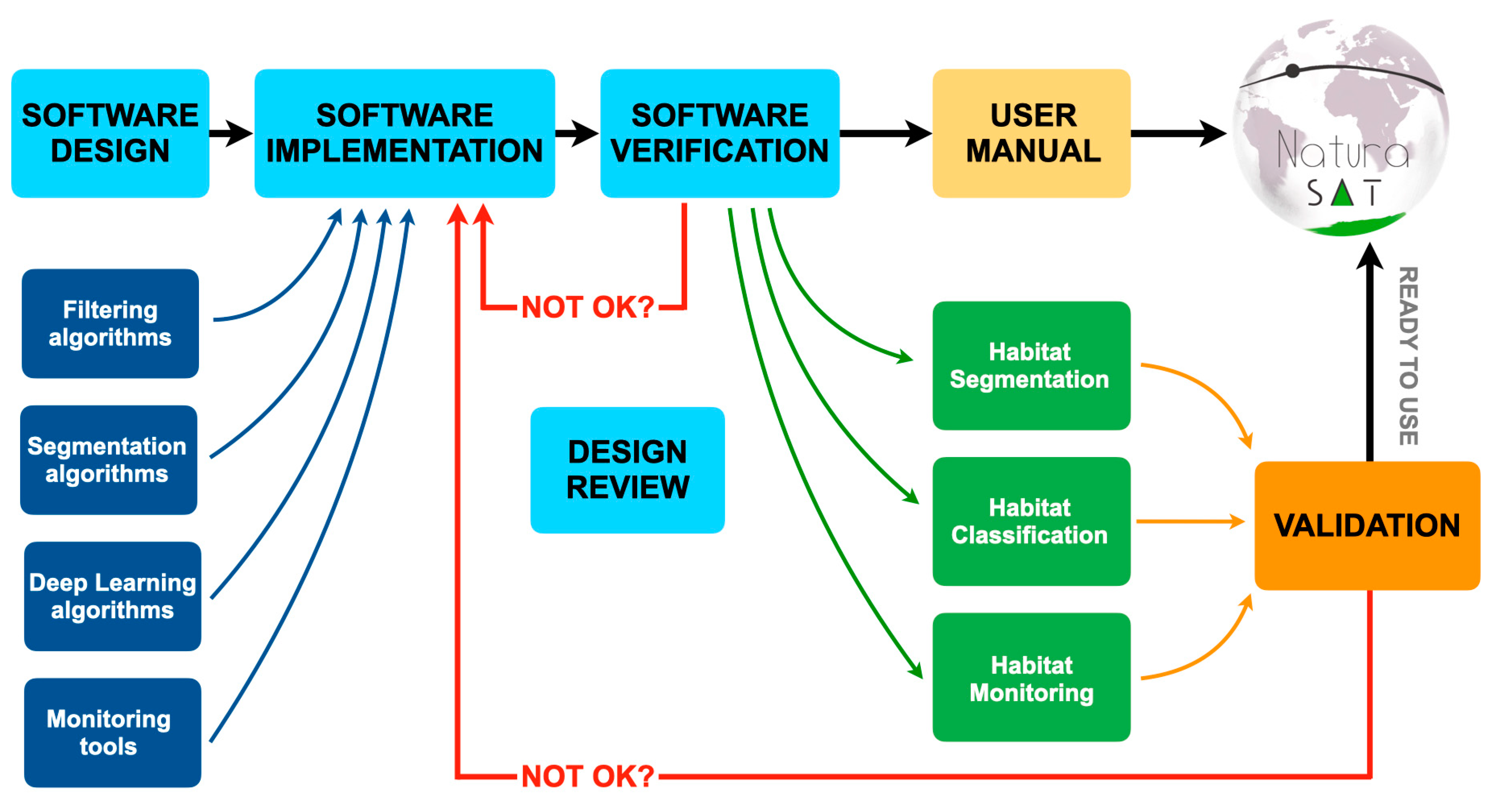
2. Materials and Methods
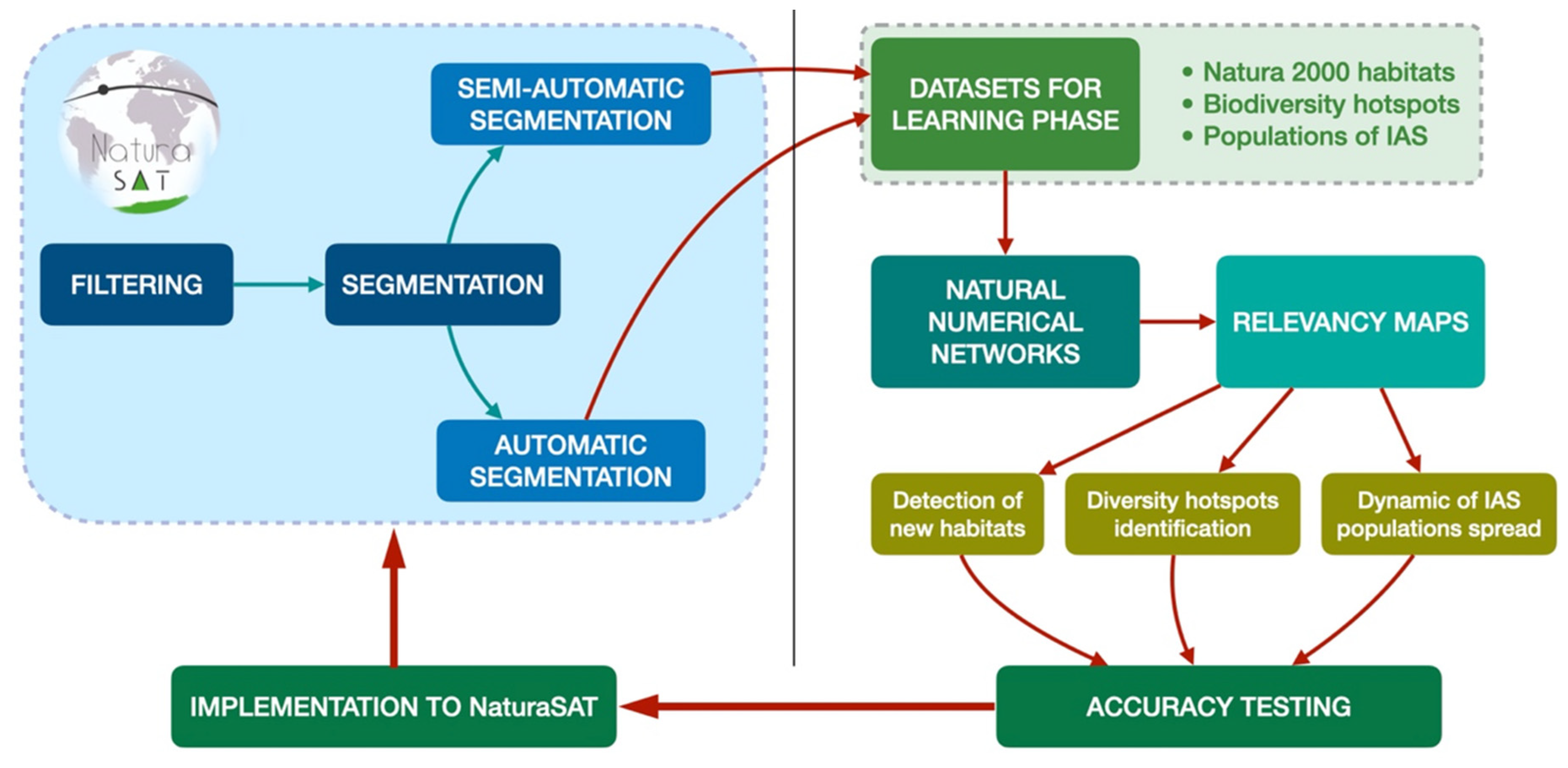
- Image filtering tool provides filtering methods based on linear, nonlinear and curvature based diffusion.
- The semi-automatic segmentation tool provides the semi-automatic segmentation of selected habitats in various types of images (satellite, airborne, UAV).
- Automatic segmentation tool provides automatic segmentation of selected habitats in various types of images (satellite, airborne, UAV).
- The monitoring tool provides methods for measuring habitat quality and habitat area.
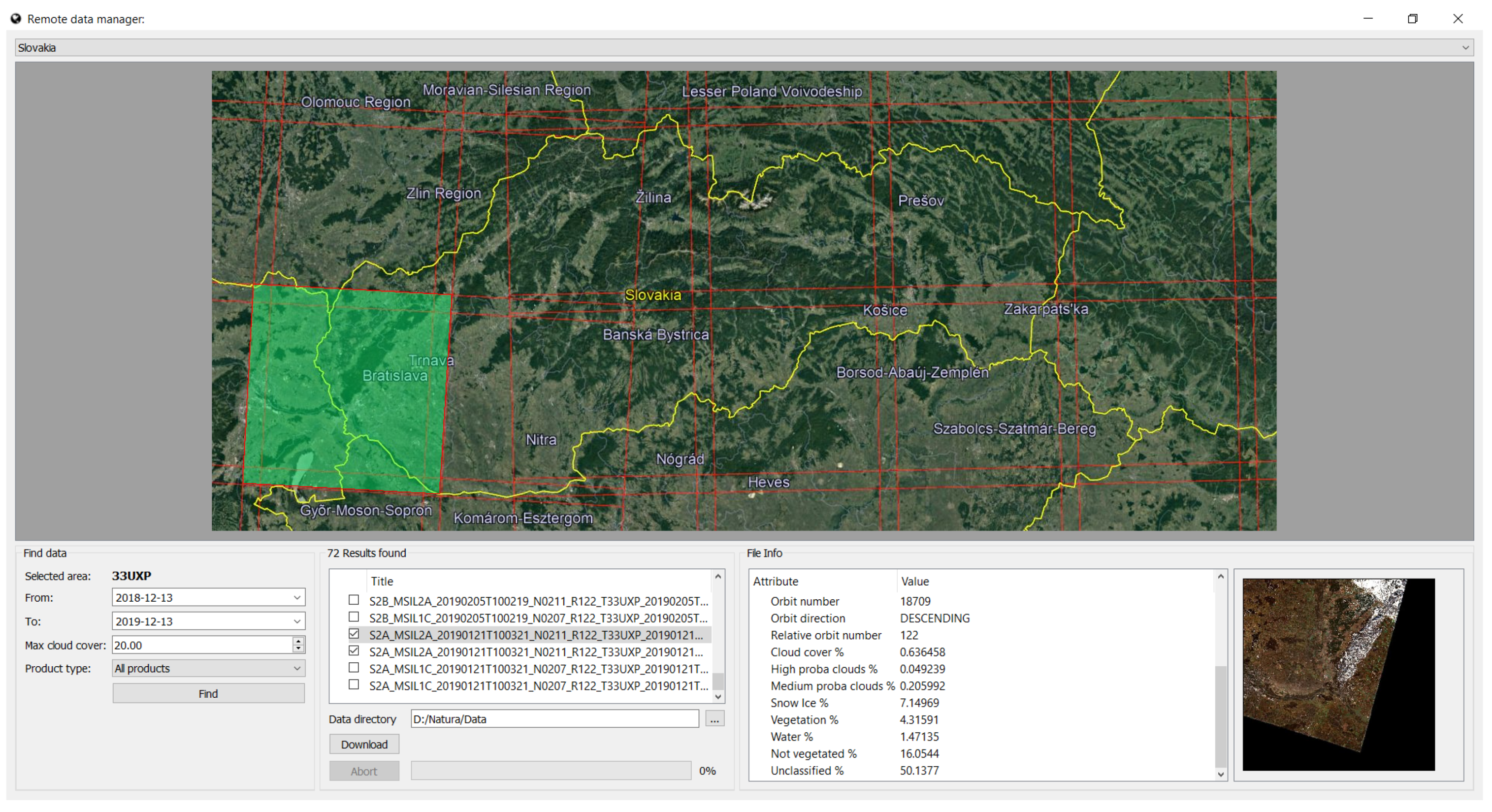
2.1. Remotely Sensed Data Used in the NaturaSat Software
2.2. Habitat Distribution
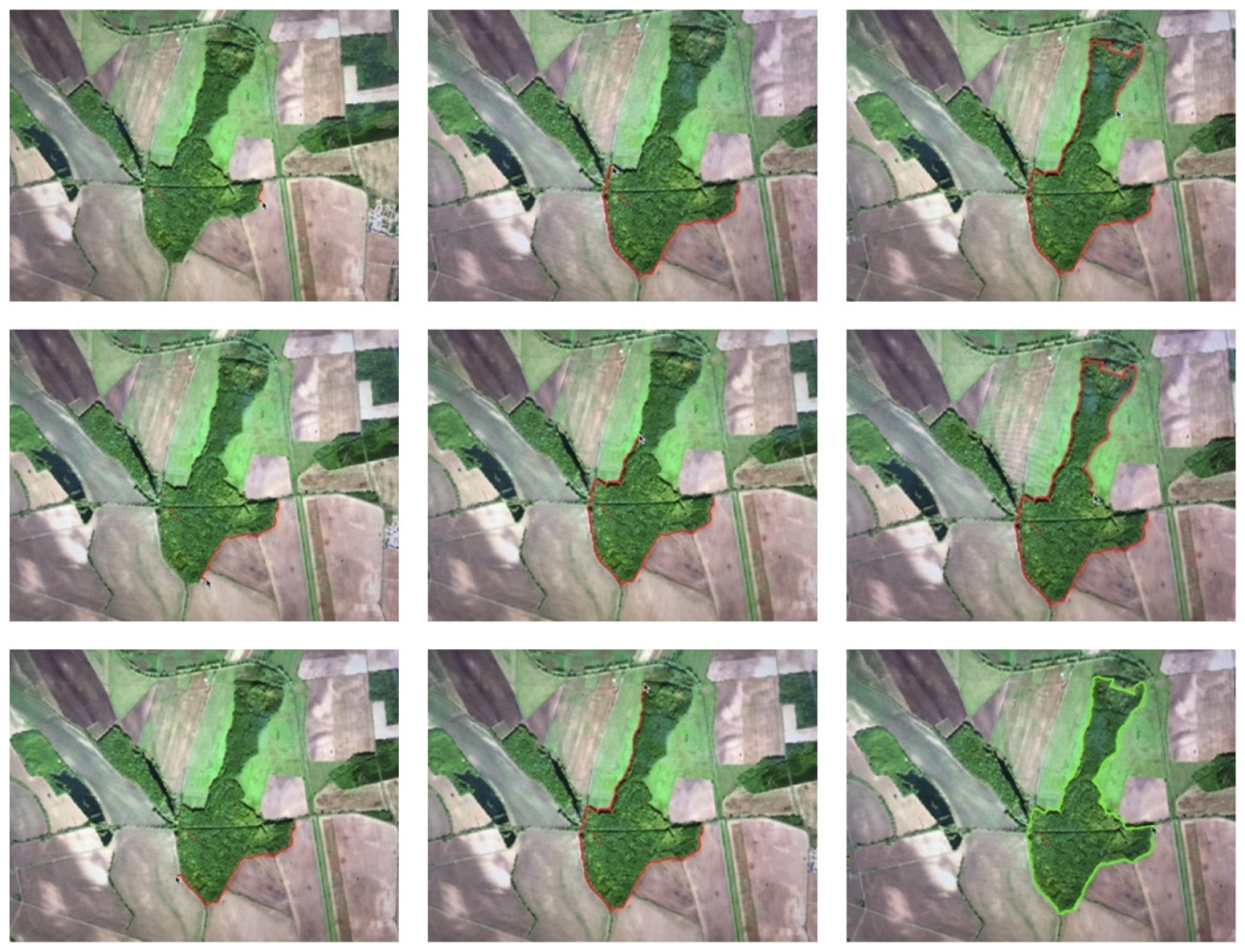
2.2.1. Semi-Automatic Segmentation
2.2.2. Automatic Segmentation
2.3. Habitat Classification and Relevancy Maps
2.4. Distinguishing between Natural and Managed Habitats
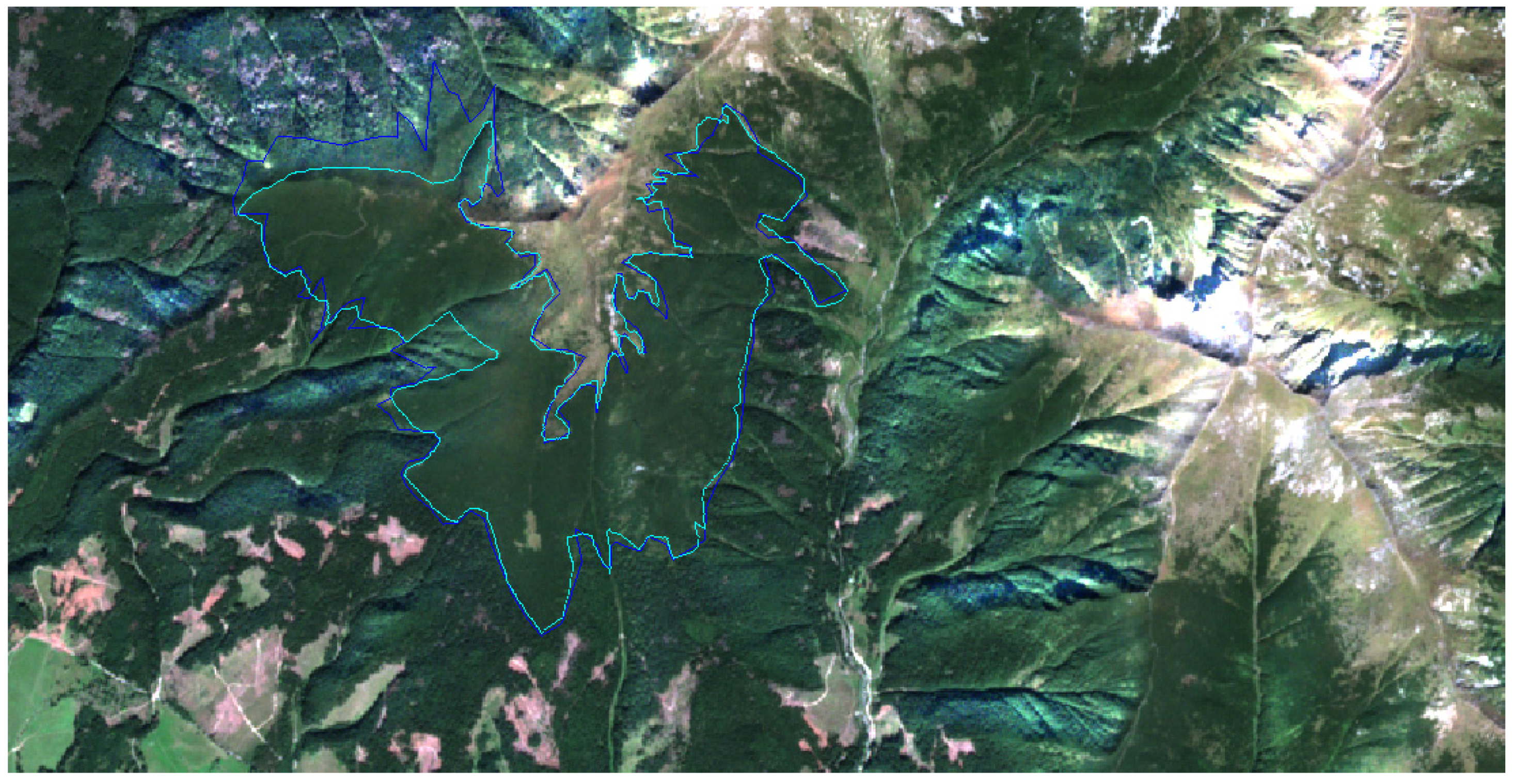
2.5. Testing and Validation of Image Segmentation
2.6. Habitat Monitoring
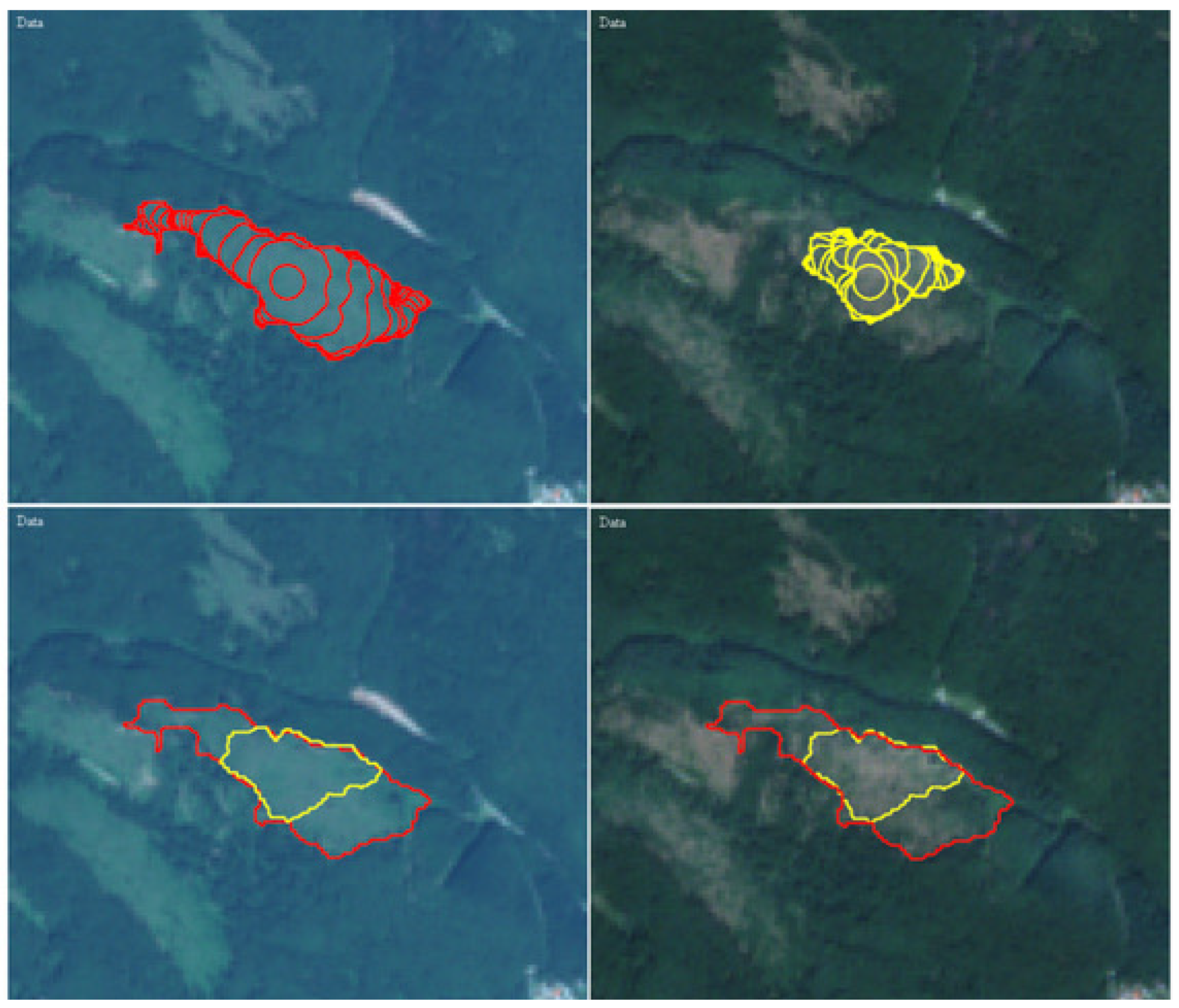
2.6.1. Spatio-Temporal Change Monitoring
2.6.2. Habitat Quality Monitoring
3. Results
3.1. Habitat Distribution
3.2. Distinguishing between Natural and Managed Habitats
3.3. Habitat Classification and Relevancy Maps
3.4. Habitat Monitoring
3.4.1. Dynamic Area Change Monitoring
3.4.2. Habitat Quality Monitoring
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, P. A survey of remote-sensing big data. Front. Environ. Sci. 2015, 3, 45. [Google Scholar] [CrossRef] [Green Version]
- Randin, C.F.; Ashcroft, M.B.; Bolliger, J.; Cavender-Bares, J.; Coops, N.C.; Dullinger, S.; Dirnböck, T.; Eckert, S.; Ellis, E.; Fernández, N.; et al. Monitoring biodiversity in the Anthropocene using remote sensing in species distribution models. Remote Sens. Environ. 2020, 239, 111626. [Google Scholar] [CrossRef]
- Corbane, C.; Lang, S.; Pipkins, K.; Alleaume, S.; Deshayes, M.; García Millán, V.E.; Strasser, T.; Vanden Borre, J.; Toon, S.; Michael, F. Remote sensing for mapping natural habitats and their conservation status—New opportunities and challenges. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 7–16. [Google Scholar] [CrossRef]
- Lausch, A.; Heurich, M.; Magdon, P.; Rocchini, D.; Schulz, K.; Bumberger, J.; King, D.J. A Range of Earth Observation Techniques for Assessing Plant Diversity. In Remote Sensing of Plant Biodiversity; Cavender-Bares, J., Gamon, J.A., Townsend, P.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 13, pp. 309–348. [Google Scholar]
- Ullerud, H.A.; Bryn, A.; Halvorsen, R.; Hemsing, L.Ø. Consistency in land-cover mapping: Influence of field workers, spatial scale and classification system. Appl. Veg. Sci. 2018, 21, 278–288. [Google Scholar] [CrossRef] [Green Version]
- Chi, M.; Plaza, A.; Benediktsson, J.A.; Sun, Z.; Shen, J.; Zhu, Y. Big Data for Remote Sensing: Challenges and Opportunities. Proc. IEEE 2016, 104, 2207–2219. [Google Scholar] [CrossRef]
- Rocchini, D.; Luque, S.; Pettorelli, N.; Bastin, L.; Doktor, D.; Faedi, N.; Feilhauer, H.; Féret, J.-B.; Foody, G.M.; Gavish, Y.; et al. Measuring β-diversity by remote sensing: A challenge for biodiversity monitoring. Methods Ecol. Evol. 2018, 9, 1787–1798. [Google Scholar] [CrossRef] [Green Version]
- Pettorelli, N.; Bühne, H.S.T.; Tulloch, A.; Dubois, G.; Macinnis-Ng, C.; Queirós, A.M.; Keith, D.A.; Wegmann, M.; Schrodt, F.; Stellmes, M.; et al. Satellite remote sensing of ecosystem functions: Opportunities, challenges and way forward. Remote Sens. Ecol. Conserv. 2018, 2, 2056–3485. [Google Scholar] [CrossRef]
- De Klerk, H.M.; Burgess, N.D.; Visser, V. Probabilistic description of vegetation ecotones using remote sensing. Ecol. Inform. 2018, 46, 125–132. [Google Scholar] [CrossRef]
- Minasny, B.; Berglund, Ö.; Connolly, J.; Hedley, C.; De Vries, F.; Gimona, A.; Kempen, B.; Kidd, D.; Lilja, H.; Malone, B.; et al. Digital mapping of peatlands—A critical review. Earth-Sci. Rev. 2019, 196, 102870. [Google Scholar] [CrossRef]
- Zellweger, F.; De Frenne, P.; Lenoir, J.; Rocchini, D.; Coomes, D. Advances in Microclimate Ecology Arising from Remote Sensing. Trends Ecol. Evol. 2019, 34, 327–341. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhang, F.; Qi, Y.; Deng, L.; Wang, X.; Yang, S. New research methods for vegetation information extraction based on visible light remote sensing images from an unmanned aerial vehicle (UAV). Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 215–226. [Google Scholar] [CrossRef]
- Braun-Blanquet, J. Pflanzensoziologie: Grundzüge der Vegetationskunde, 3rd ed.; Springer: Wien, Austria, 1964; p. 865. [Google Scholar]
- Chytrý, M.; Tichý, L.; Hennekens, S.M.; Knollová, I.; Janssen, J.A.M.; Rodwell, J.S.; Peterka, T.; Marcenò, C.; Landucci, F.; Danihelka, J.; et al. EUNIS Habitat Classification: Expert system, characteristic species combinations and distribution maps of European habitats. Appl. Veg. Sci. 2020, 23, 648–675. [Google Scholar] [CrossRef]
- Landucci, F.; Tichý, L.; Šumberová, K.; Chytrý, M. Formalized classification of species-poor vegetation: A proposal of a consistent protocol for aquatic vegetation. J. Veg. Sci. 2015, 26, 791–803. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Y.; Zu, J.; Wang, Z.; Huang, K.; Cong, N.; Tang, Z. Effects of data temporal resolution on phenology extractions from the alpine grasslands of the Tibetan Plateau. Ecol. Indic. 2019, 104, 365–377. [Google Scholar] [CrossRef]
- Vanden Borre, J.; Paelinckx, D.; Mücher, C.A.; Kooistra, L.; Haest, B.; De Blust, G.; Schmidt, A.M. Integrating remote sensing in Natura 2000 habitat monitoring: Prospects on the way forward. J. Nat. Conserv. 2011, 19, 116–125. [Google Scholar] [CrossRef]
- Mikula, K.; Kollár, M.; Ožvat, A.A.; Ambroz, M.; Čahojová, L.; Jarolímek, I.; Šibík, J.; Šibíková, M. Natural Numerical Networks for Natura 2000 habitats exploration by satellite data. Appl. Math. Model. 2021. submitted. Available online: https://arxiv.org/abs/2108.04327 (accessed on 19 August 2021).
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic active contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Kichenassamy, S.; Kumar, A.; Olver, P.; Tannenbaum, A.; Yezzi, A. Conformal curvature flows: From phase transition to active vision. Arch. Ration. Mech. Anal. 1996, 134, 275–301. [Google Scholar] [CrossRef] [Green Version]
- Mikula, K.; Urbán, J.; Kollár, M.; Ambroz, M.; Jarolímek, I.; Šibík, J.; Šibíková, M. Semi-automatic segmentation of natura 2000 habitats in sentinel-2 satellite images by evolving open curves. Discret. Contin. Dyn. Syst. Ser. S 2021, 14, 1033–1046. [Google Scholar] [CrossRef] [Green Version]
- Mikula, K.; Urbán, J.; Kollár, M.; Ambroz, M.; Jarolímek, I.; Šibík, J.; Šibíková, M. An automated segmentation of NATURA 2000 habitats from Sentinel-2 optical data. Discret. Contin. Dyn. Syst. Ser. S 2021, 14, 1017–1032. [Google Scholar] [CrossRef]
- Šibík, J. Slovak Vegetation Database. In Vegetation Databases for the 21st Century; Dengler, J., Oldeland, J., Jansen, F., Chytrý, M., Ewald, J., Finckh, M., Glöckler, F., Lopez-Gonzalez, G., Peet, R.K., Schaminée, J.H.J., Eds.; Biodiversity & Ecology: Hamburg, Germany, 2012; Volume 4, p. 429. [Google Scholar]
- Chytrý, M.; Hennekens, S.M.; Jiménez-Alfaro, B.; Knollová, I.; Dengler, J.; Jansen, F.; Landucci, F.; Schaminée, J.H.J.; Aćić, S.; Agrillo, E.; et al. European Vegetation Archive (EVA): An integrated database of European vegetation plots. Appl. Veg. Sci. 2016, 19, 173–180. [Google Scholar] [CrossRef] [Green Version]
- Mikula, K.; Ševčovič, D. Evolution of plane curves driven by a nonlinear function of curvature and anisotropy. SIAM J. Appl. Math. 2001, 61, 1473–1501. [Google Scholar]
- Mikula, K.; Ševčovič, D.; Balažovjech, M. A simple, fast and stabilized flowing finite volume method for solving general curve evolution equations. Commun. Comput. Phys. 2010, 7, 195–211. [Google Scholar] [CrossRef]
- Ambroz, M.; Kollár, M.; Mikula, K. Semi-implicit scheme for semi-automatic segmentation in Naturasat software. In Proceedings of the 21th Conference on Scientific Computing, Vysoké Tatry-Podbanské, Slovakia, 10–15 September 2020; pp. 171–180. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]
- Janssen, J.A.M.; Rodwell, J.S.; Criado, M.G.; Gubbay, S.; Haynes, T.; Nieto, A.; Sanders, N.; Landucci, F.; Loidi, J.; Ssymank, A.; et al. European Red List of Habitats, Part 2, Terrestrial and Freshwater Habitats; European Union: Luxembourg, 2016; p. 44. [Google Scholar]
- Margules, C.R.; Pressey, R.L. Systematic conservation planning. Nature 2000, 405, 243–253. [Google Scholar] [CrossRef] [PubMed]
- Weber, N.; Christophersen, T. The influence of non-governmental organisations on the creation of Natura 2000 during the European Policy process. For. Policy Econ. 2002, 4, 1–12. [Google Scholar] [CrossRef]
- Pereira, H.M.; Leadley, P.W.; Proença, V.; Alkemade, R.; Scharlemann, J.P.W.; Fernandez-Manjarrés, J.F.; Araújo, M.B.; Balvanera, P.; Biggs, R.; Cheung, W.W.L.; et al. Scenarios for Global Biodiversity in the 21st Century. Science 2010, 330, 1496–1501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rudiyanto; Minasny, B.; Setiawan, B.I.; Saptomo, S.K.; McBratney, A.B. Open digital mapping as a cost-effective method for mapping peat thickness and assessing the carbon stock of tropical peatlands. Geoderma 2018, 313, 25–40. [Google Scholar] [CrossRef]
- Zlinszky, A.; Mücke, W.; Lehner, H.; Briese, C.; Pfeifer, N. Categorizing Wetland Vegetation by Airborne Laser Scanning on Lake Balaton and Kis-Balaton, Hungary. Remote Sens. 2012, 4, 1617–1650. [Google Scholar] [CrossRef] [Green Version]
- Besnard, A.G.; Davranche, A.; Maugenest, S.; Bouzillé, J.B.; Vian, A.; Secondi, J. Vegetation maps based on remote sensing are informative predictors of habitat selection of grassland birds across a wetness gradient. Ecol. Indic. 2015, 58, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Doneus, M. Openness as Visualization Technique for Interpretative Mapping of Airborne Lidar Derived Digital Terrain Models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef] [Green Version]
- Feilhauer, H.; Dahlke, C.; Doktor, D.; Lausch, A.; Schmidtlein, S.; Schulz, G.; Stenzel, S. Mapping the local variability of Natura 2000 habitats with remote sensing. Appl. Veg. Sci. 2014, 17, 765–779. [Google Scholar] [CrossRef]
- Zlinszky, A.; Deák, B.; Kania, A.; Schroiff, A.; Pfeifer, N. Natura 2000 Habitat Quality mapping in a Pannonic salt steppe from full-waveform Airborne Laser Scanning. In Proceedings of the International Workshop on Remote Sensing and GIS for Monitoring of Habitat Quality, Vienna, Austria, 24–25 September 2014; pp. 130–134. [Google Scholar]
- Zlinszky, A.; Deák, B.; Kania, A.; Schroiff, A.; Pfeifer, N. Mapping Natura 2000 Habitat Conservation Status in a Pannonic Salt Steppe with Airborne Laser Scanning. Remote Sens. 2015, 7, 2991–3019. [Google Scholar] [CrossRef] [Green Version]
- Capmourteres, V.; Anand, M. “Conservation value”: A review of the concept and its quantification. Ecosphere 2016, 7, e01476. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Habitat | Locality Code | Mean Hausdorff Distance | Maximal Hausdorff Distance |
|---|---|---|---|
| 91F0 | bogdalickyvrch1 | 8.3785 | 25.1905 |
| 91F0 | bogdalickyvrch2 | 7.5773 | 27.8022 |
| 91F0 | bogdalickyvrch3 | 6.7352 | 35.5152 |
| 91F0 | bogdalickyvrch4 | 7.1754 | 36.9335 |
| 91F0 | brestovany1 | 8.8597 | 28.5780 |
| 91F0 | brestovany2 | 14.2629 | 83.2185 |
| 91F0 | brestovany3 | 7.7355 | 24.6512 |
| 91F0 | brestovany4 | 8.9412 | 26.6053 |
| 91F0 | dedovejamy1 | 9.9970 | 86.1185 |
| 91F0 | dedovejamy2 | 11.7609 | 53.6198 |
| 91F0 | dedovejamy3 | 14.0657 | 57.6020 |
| 91F0 | dedovejamy4 | 10.5434 | 39.9949 |
| 91F0 | feldskyles | 11.3289 | 60.6908 |
| 91F0 | feldskyles2 | 14.0136 | 44.1078 |
| 91F0 | suchohrad | 5.4751 | 18.2485 |
| 91F0 | suchohradsever | 6.3606 | 25.7611 |
| 91F0 | suchohradTP | 20.4569 | 172.1070 |
| 91F0 | suchohradzahradzou | 14.9159 | 40.0650 |
| 91F0 | vysokaprimorave | 14.6520 | 56.1716 |
| 91F0 | vysokaprimorave2 | 19.5480 | 213.7380 |
| 91F0 | vysokaprimorave3 | 19.7037 | 95.0065 |
| 91F0 | vysokaprimorave4 | 11.9635 | 62.0790 |
| 91F0 | zavod1 | 12.8527 | 37.4885 |
| 91F0 | zavod2 | 8.3211 | 39.3252 |
| 91F0 | Average | 11.4844 | 57.9424 |
| Automatic Versus Semi-Automatic | Automatic Versus GPS Track | ||||
|---|---|---|---|---|---|
| Habitat | Locality Code | Mean Hausdorff Distance (m) | Max. Hausdorff Distance (m) | Mean Hausdorff Distance (m) | Max. Hausdorff Distance (m) |
| 91F0 | suchohradzahradzou | 6.8 | 27.2 | 12.4 | 39.2 |
| 91F0 | moravskyjan | 10.7 | 63.9 | 10.8 | 50.4 |
| 91F0 | vysokaprimorave4 | 8.5 | 51.9 | 11.7 | 49.9 |
| Habitat | Locality Code | Mean Hausdorff Distance | Max. Hausdorff Distance |
|---|---|---|---|
| 4070 | choc20 | 19.1041 | 170.9960 |
| 4070 | NT4 | 13.2219 | 83.2163 |
| 4070 | NT5 | 14.3449 | 70.0201 |
| 4070 | NT6 | 11.3362 | 51.2578 |
| 4070 | NT8 | 14.7244 | 49.7035 |
| 4070 | NT10 | 28.3386 | 336.1420 |
| 4070 | orava13 | 10.6748 | 52.9471 |
| 4070 | orava14 | 16.8741 | 116.0220 |
| 4070 | ZT16 | 8.9677 | 86.7985 |
| 4070 | ZT18 | 44.7946 | 413.2960 |
| 4070 | MF1 | 3.6621 | 21.7807 |
| 4070 | MF2 | 8.2804 | 88.0855 |
| 4070 | MF3 | 11.3811 | 131.1500 |
| 4070 | MF4 | 5.7333 | 20.6663 |
| 4070 | MF5 | 15.3571 | 81.2460 |
| 4070 | MF6 | 8.1688 | 59.4718 |
| 4070 | MF7 | 6.7400 | 53.6128 |
| 4070 | MF8 | 8.6118 | 79.3601 |
| 4070 | Average | 13.9064 | 109.2096 |
| 2015 | 2019 | Differences | |
|---|---|---|---|
| Area [m2] | 79,068.1 | 30,668.1 | 48,400.0 |
| Perimeter [m] | 1682.53 | 882.65 | 799.88 |
| Isoperimetric ratio | 0.350982 | 0.494664 | 0.143682 |
| HD [m] | 186.67 | ||
| MHD [m] | 61.61 |
| 2015 | 2019 | Differences | |
|---|---|---|---|
| Area [m2] | 94,188.9 | 42,565.2 | 51,623.7 |
| Perimeter [m] | 1978.64 | 1021.37 | 957.27 |
| Isoperimetric ratio | 0.302327 | 0.512739 | 0.210412 |
| HD [m] | 230.83 | ||
| MHD [m] | 74.79 |
| Band Characteristic | Bark Beetle Outbreak | Clear-Cut | Succession |
|---|---|---|---|
| Significance | |||
| B02-Blue_Std | X | . | . |
| B03-Green_Std | . | X | . |
| B04-Red_Std | . | . | . |
| B05-Vegetation classification_Std | . | . | . |
| B06-Vegetation classification_Std | X | X | . |
| B07-Vegetation classification_Std | . | . | . |
| B08-Near infrared_Std | X | . | X |
| B09-Water vapour_Std | . | . | X |
| B8A-Vegetation classification_Std | . | . | . |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mikula, K.; Šibíková, M.; Ambroz, M.; Kollár, M.; Ožvat, A.A.; Urbán, J.; Jarolímek, I.; Šibík, J. NaturaSat—A Software Tool for Identification, Monitoring and Evaluation of Habitats by Remote Sensing Techniques. Remote Sens. 2021, 13, 3381. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173381
Mikula K, Šibíková M, Ambroz M, Kollár M, Ožvat AA, Urbán J, Jarolímek I, Šibík J. NaturaSat—A Software Tool for Identification, Monitoring and Evaluation of Habitats by Remote Sensing Techniques. Remote Sensing. 2021; 13(17):3381. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173381
Chicago/Turabian StyleMikula, Karol, Mária Šibíková, Martin Ambroz, Michal Kollár, Aneta A. Ožvat, Jozef Urbán, Ivan Jarolímek, and Jozef Šibík. 2021. "NaturaSat—A Software Tool for Identification, Monitoring and Evaluation of Habitats by Remote Sensing Techniques" Remote Sensing 13, no. 17: 3381. https://0-doi-org.brum.beds.ac.uk/10.3390/rs13173381