1. Introduction
Ocean eddies represent an important ocean phenomenon, affecting both surface currents and the transportation of chemical substances, which play a significant role in theocean circulation structure and marine ecology. Moreover, ocean eddies also affect atmospheric phenomena, such as wind, clouds, and rainfall through air–sea interactions [
1,
2]. Tracking and observing eddies has become one of the most critical advances in ocean remote sensing in the 21st century. Broadly speaking, “ocean eddy” is the general term for a rotating seawater motion with a scale smaller than a Rossby wave controlled by the geostrophic potential eddy conservation equation, including the vortex, swirl, ring, meander, filament, and wake [
3,
4].
Since ocean eddies were first discovered in the 1970s, the observation of mesoscale eddies has primarily relied on dynamic sea surface height data obtained from satellite altimeters to retrieve and track eddies [
5,
6]. However, owing to the low spatial resolution of traditional satellite altimeter data, it is difficult to detect sub-mesoscale eddies and small-scale eddies ranging from 1 to 100 km, severely restricting eddies’ identification [
7]. Because ocean eddies play a vital role in regulating changes in the sea surface temperature (SST) and chlorophyll concentration, high-resolution optical sensors have been used to detect sub-mesoscale and small-scale eddies by determining the SST [
8,
9] and ocean color (chlorophyll concentration) [
10] variations. However, the SST and ocean color are affected by various oceanic phenomena in addition to eddies. Therefore, using the SST and water color data sets to detect eddies is prone to false alarms. Furthermore, optical sensors have proven to be vulnerable to illumination and cloud occlusion. In addition, considering the different types of observation platforms, it has been found that tracking buoys [
11], airborne sensors [
12], and other observation methods have high costs and are not suitable for large-scale observations.As an alternative, synthetic aperture radar (SAR) collects data throughout the day in all weather conditions and is not influenced by clouds, fog, or light [
13]. Moreover, SAR images acquired over the sea contain extensive information on small-scale and mesoscale ocean phenomena, such as surface waves [
14], internal waves [
15], and ocean fronts [
16]. Therefore, SAR images have become an ideal data source for monitoring ocean eddies [
1,
13,
17,
18,
19,
20].
Ocean eddies typically appear indirectly in SAR images, and there are two main mechanisms:
When there are natural tracers present on the sea surface such as sea ice, plankton, and oil spills, the resulting dampening of the capillary gravity waves and reduction of sea surface fluctuations cause weakening of the SAR backscatter. Moreover, because eddies are characterized by a significant transport capacity and material entrapment, if the tracer’s area is coupled with an eddy, the tracer will show a specific spiral distribution pattern under the influence of the eddy and appear in the SAR image. As a result, the backscattering contrast difference can reach 5–10 dB, and thus the eddy can be detected by identifying the tracer [
21,
22]. This effect typically results in a black-colored appearance for the eddies, which are collectively referred to as “black” eddies (
B-E);
As a contrasting mechanism, the interaction of surface waves with converging and shearing surface currents results in a significant enhancement of the SAR backscatter, leading to a series of bright bands on the image that outline the contours of the eddies. These eddies are collectively referred to as “white” eddies (
W-E) [
23,
24].
In recent decades, researchers have conducted numerous studies on the application of SAR in ocean eddy observation. In terms of statistical research on eddies, Andrei and Anna [
2] used SAR satellite eddy data, including Almaz-1, the Earth Resources Satellite (ERS-1/2), Japanese ERS (JERS-1), and RADARSAT, to analyze the classification of typical ocean eddies statistically. They reported that SAR has significant potential for identifying and dynamically monitoring ocean eddies In another study, Svetlana et al. [
24] used more than 500 ENVISAT ASAR images acquired in the Red Sea region from 2006 to 2011 to statistically analyze the temporal and spatial distribution characteristics of the sub-mesoscale, mesoscale, and large-scale ocean eddies in that sea region. Similarly, Xu et al. [
20] used 426 scenes of ERS-2 and ENVISAT ASAR data from 2005 to 2011 to study the characteristics of ocean eddies in the Luzon Strait and its adjacent waters. In terms of eddy detection and feature parameter extraction, Was and Andharia [
25] conducted research on the inversion of an ocean eddy’s rotation speed and vortex intensity based on SAR images, while Yang et al. [
26] proposed an SAR image eddy information extraction method based on logarithmic spiral edge fitting to extract eddy information such as the center position, diameter, and edge size. Schuler et al. [
27] used Cloude–Pottier polarization decomposition to obtain the entropy/anisotropy/alpha feature parameters, combined with the Wishart classifier, proposed a sea surfactant oil film detection algorithm, which was then applied to eddy identification. In accordance with the rapid development and broad application of artificial intelligence technology in recent years, Huang et al. [
28] proposed a deep learning network model based on principal component analysis (PCA) filtering convolution. This deep learning model can learn the advanced and invariant features of ocean eddies in SAR images and provide automatic and accurate eddy detection without requiring expert interpretation knowledge. In addition to these studies, significant research has been conducted on eddy detection [
29,
30,
31], the formation mechanism of ocean eddies based on SAR [
32,
33], and ocean eddy SAR image simulation methods [
34]. In brief, current research on SAR eddies has predominately focused on the traditional polarization mode (single and dual polarimetric). Little research has been conducted on compact polarimetric (CP) SAR.
Over time, SAR has transformed from a single polarimetric system to a multi-polarimetric system with fully polarimetric (FP) observation capabilities after its 50 years of development. Compared with single-polarimetric SAR, dual-polarimetric (DP) or FP SAR can obtain more scattering characteristics of the observation target, significantly improving the detection ability [
35,
36,
37,
38]. Although its improved target detection capabilities characterize FP SAR, its image width is much smaller than that of the single polarized SAR (e.g., the FP SAR image width of RADARSAT-2 is only 25/50 km, while the image width of the single-polarimetric ScanSAR mode is 500 km). Moreover, the system structure is complex, and the maintenance cost is extremely high, which significantly limits the application of FP SAR. To overcome the shortcomings of single-polarimetric and FP SAR, CP SAR that uses a special DP SAR structure was proposed in 2005 [
39,
40]. This can achieve both a wide range of observations (up to 350 km) and obtain polarization scattering information close to that which can be obtained by FP SAR. In light of the unique advantages of CP SAR, Canada’s RADARSAT Constellation Missions (RCM) [
41], India’s Risat-1 satellite [
42], and Japan’s Advanced Land Observing Satellite 2 (ALOS-2) have all supported the CP mode and are being actively researched.
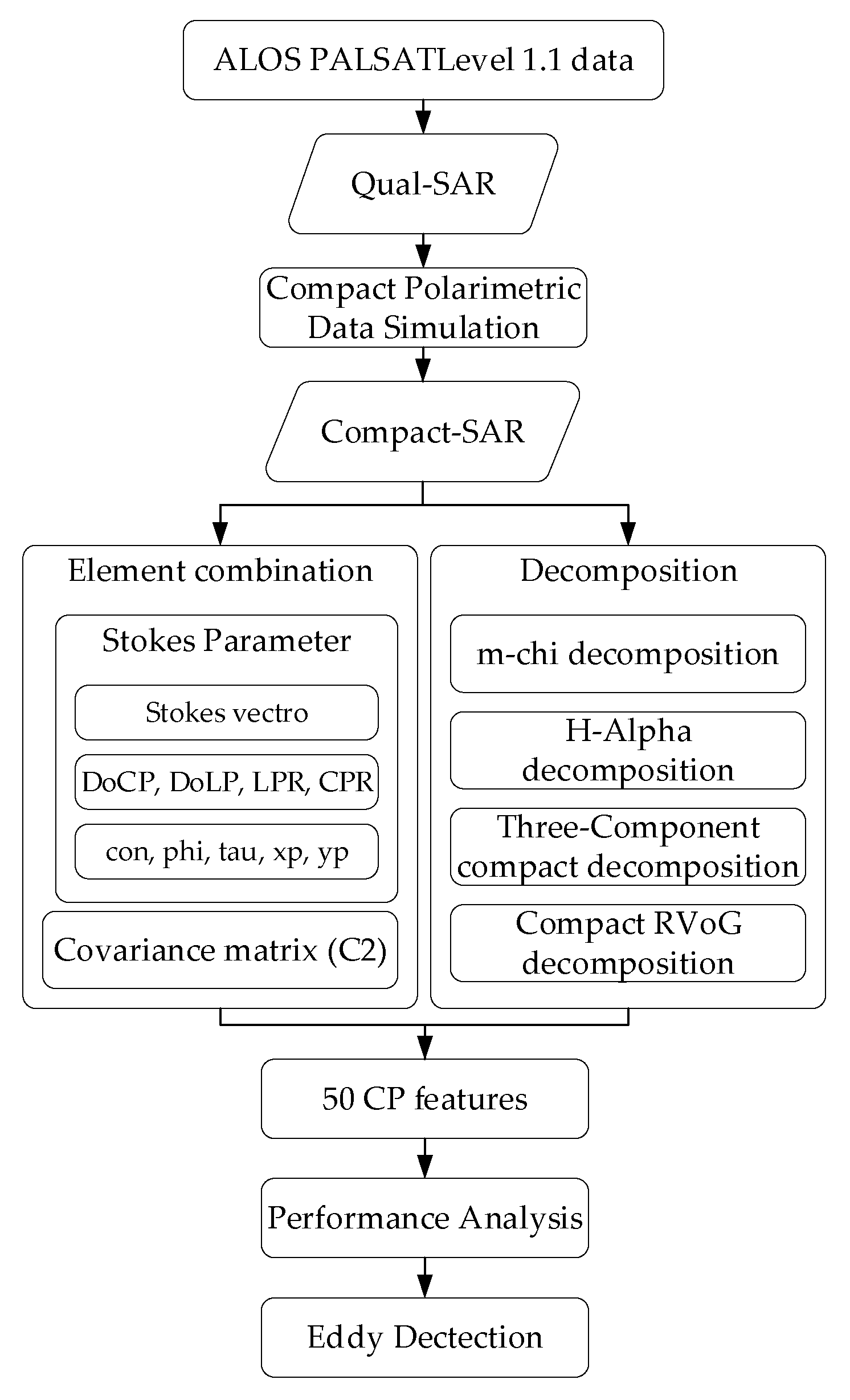
However, there is no relevant research on the use of CP SAR to observe ocean eddies. To develop CP SAR eddy detection technology, it is necessary to fully understand the response characteristics of CP SAR to ocean eddies. This study investigates the response characteristics of CP SAR to ocean eddies by extracting 50 types of CP features from 2 scenes of ALOS Phased Array type L-band SAR (PALSAR) data (the image covers the
W-E and
B-E) and then compares and analyzes the ocean eddy detection performance of the 50 features. On this basis, eddy detection and eddy information extraction experiments are conducted. This work contributes to developing subsequent work on CP SAR eddy detection and eddy refinement structure studies. The chapter structure of this article is as follows.
Section 2 introduces the data and describes eddies.
Section 3 introduces CP theory, CP data acquisition, and the feature extraction process.
Section 4 conducts a comprehensive quantification and evaluation of CP features for eddy detection.
Section 5 presents the eddy detection and eddy information extraction experiments.
Section 6 discusses the results, and finally, the paper is concluded.
2. Data and Eddies
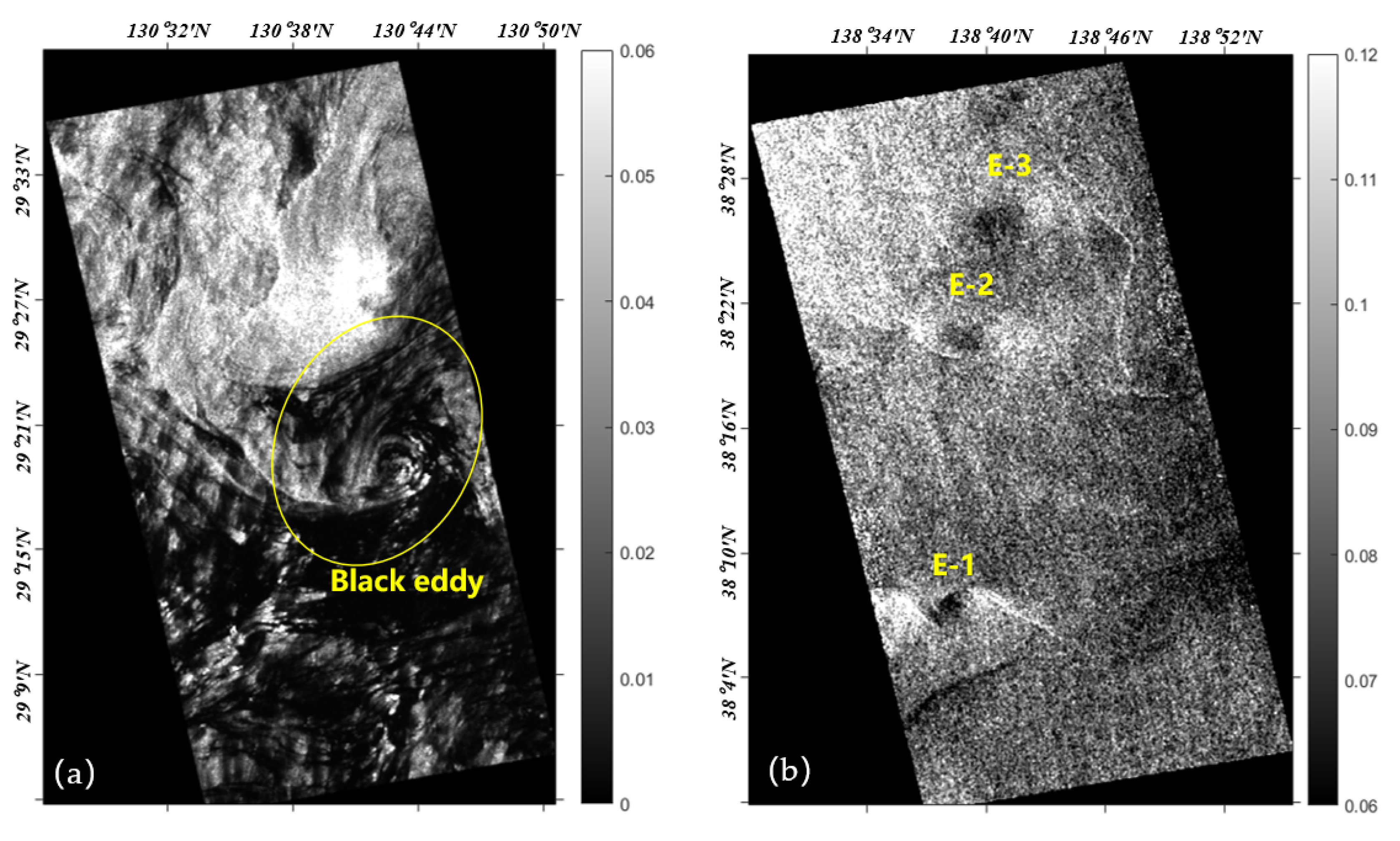
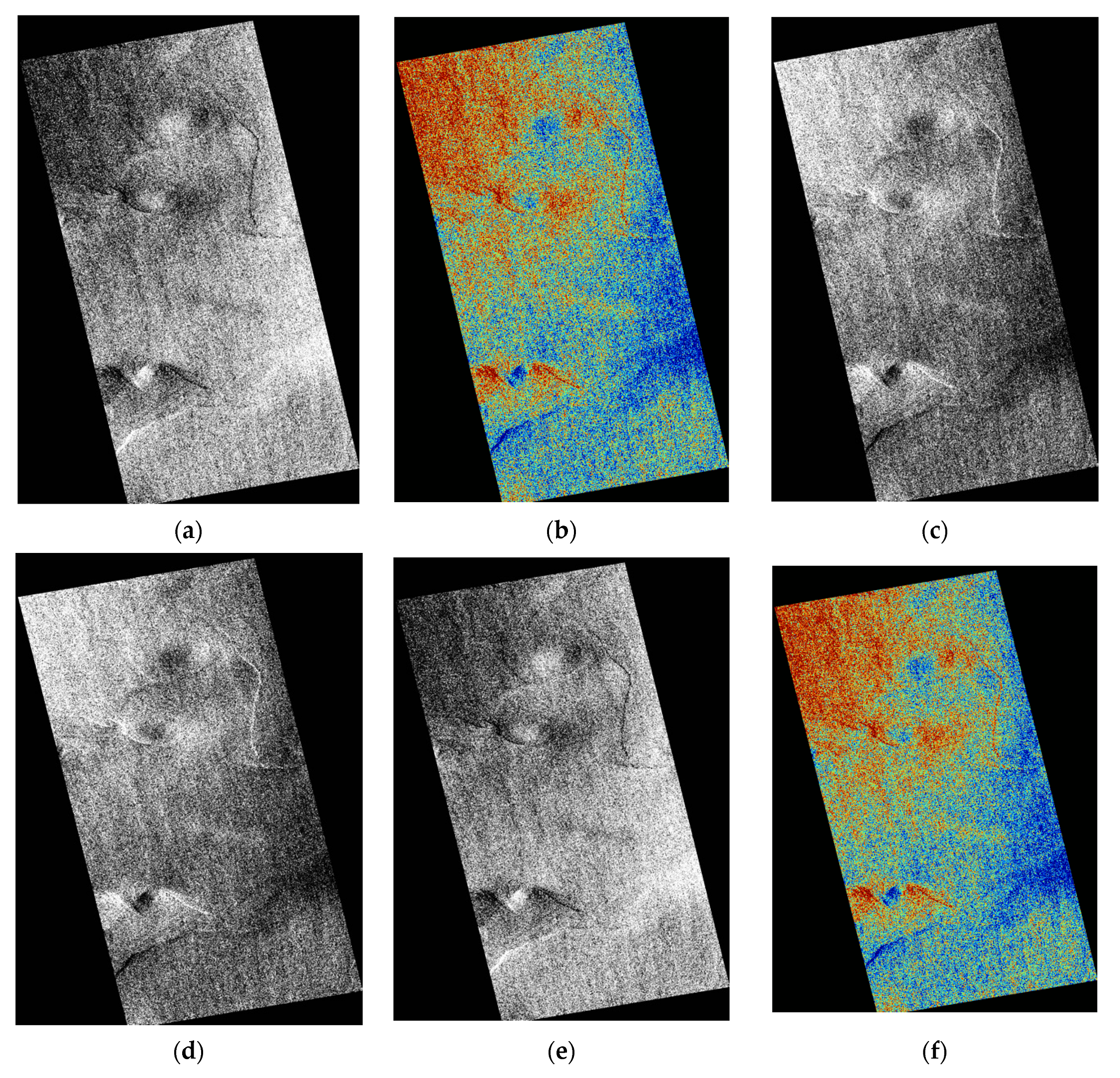
In this study, two PALSAR images were obtained (
Figure 1). PALSAR is an L-band FP SAR sensor carried by the Japanese ALOS-1 satellite. The product used was a Level 1.1 single-look complex data with an azimuthal resolution of approximately 24 m and a distance resolution of approximately 10 m. Images #A and #B of the sea around Japan (
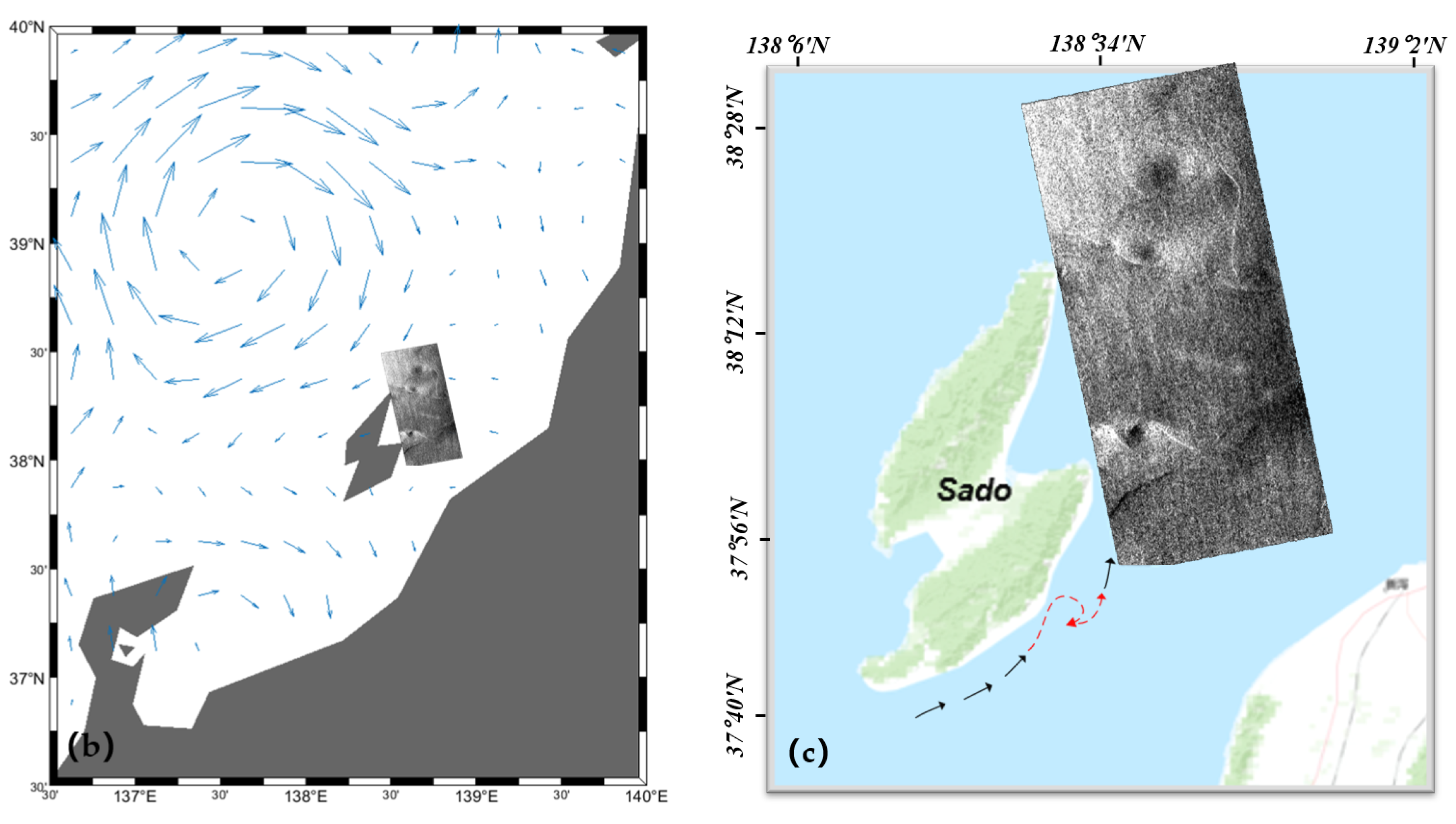
Figure 2a) were acquired on 11 November 2010 at 1:00 p.m. UTC and 2 April 2011 at 1:23 p.m. UTC, respectively.
Figure 1a shows the #A VV-polarized backscatter coefficient image, which contains three suspected
W-E with diameters of 12 km (
E-1), 13 km (
E-2), and 15 km (
E-3) from bottom to top. These three regions are very similar to the
W-E morphological structure that has been described in the literature [
26], with dark areas in the middle and bright areas on both sides. Data #A are located on the northeast side of Sado Island, and studies have shown that small eddies usually form near the coastline or between islands due to the interaction between the coastline and surface currents [
43,
44]. In addition, we performed a long time series analysis using OSCAR data, and the results indicate the presence of ocean eddies in the study area throughout the year. A snapshot of the surface geostrophic velocity field is given in
Figure 2b, which shows the presence of a mesoscale eddy with a diameter of about 200 km in the upper left corner and the presence of an eastward surface current found on the southwest side of Sado Island. According to the study on eddy formation mechanisms in the literature [
2,
43,
45], we speculate that the eddies
E-1,
E-2, and
E-3 are formed by the interaction between ocean currents and the northeast and southeast coasts of Sado Island (
Figure 2c). In
Figure 1a, eddies
E-2 and
E-3 are relatively faint, and
E-1 is more apparent, most probably due to the attenuation of the eddy as it moves from the southwest side of Sado Island to the northeast side. It is worth noting that the observed eddies consist of two parts: bright stripes along the edges and a dark central area. The former is likely due to the interaction of the eddy-induced waves and currents increasing the roughness of the sea surface, resulting in a significant enhancement of the radar backscattering intensity. The latter may be caused by the eddy convergence effect polymerizing the marine oil film, resulting in a weakening of the backscattering intensity. In general, the
W-E’s detection is focused on identifying the bright bands (i.e., bright edge areas) resulting from wave–current interaction effects. Therefore, these two components are discussed independently below.
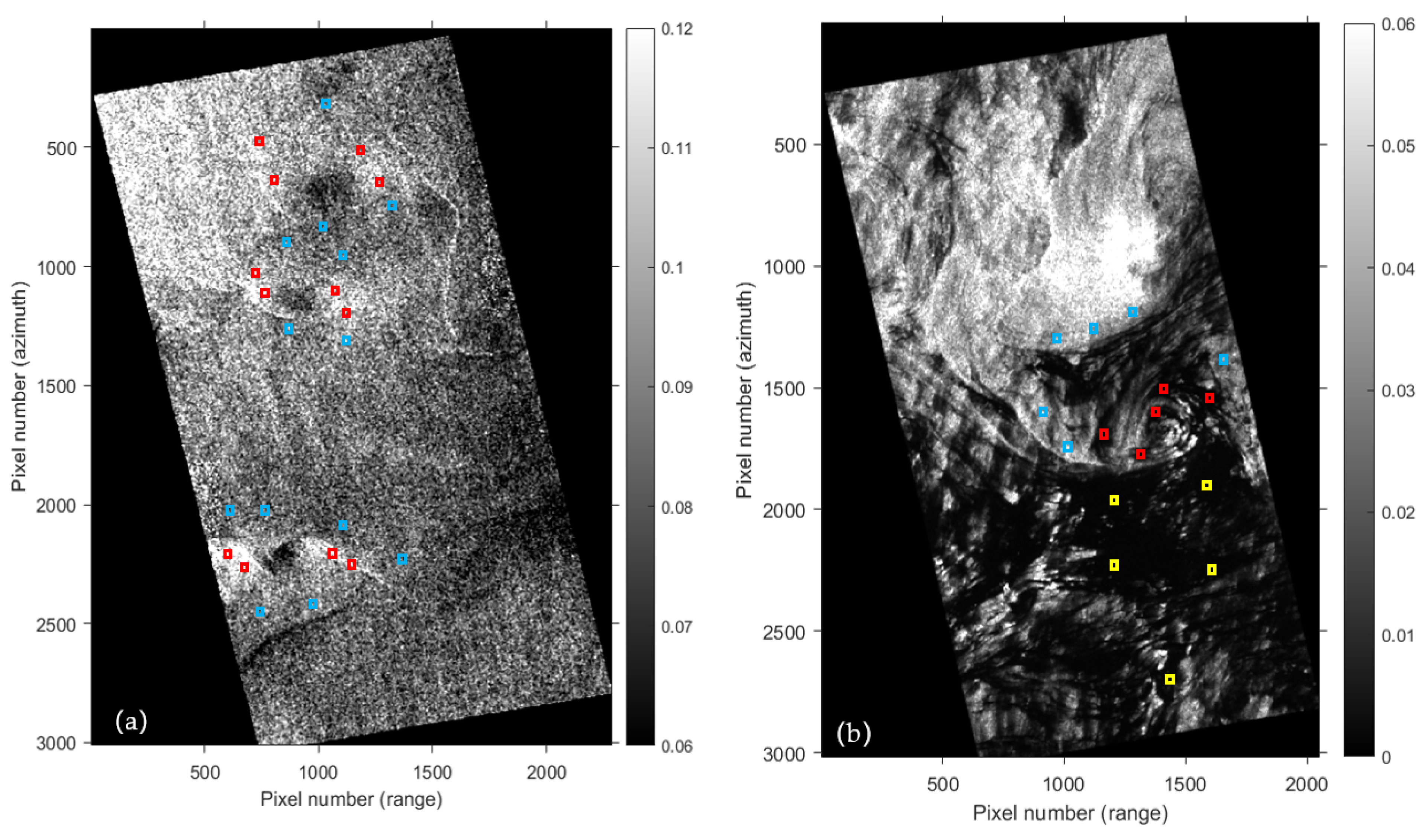
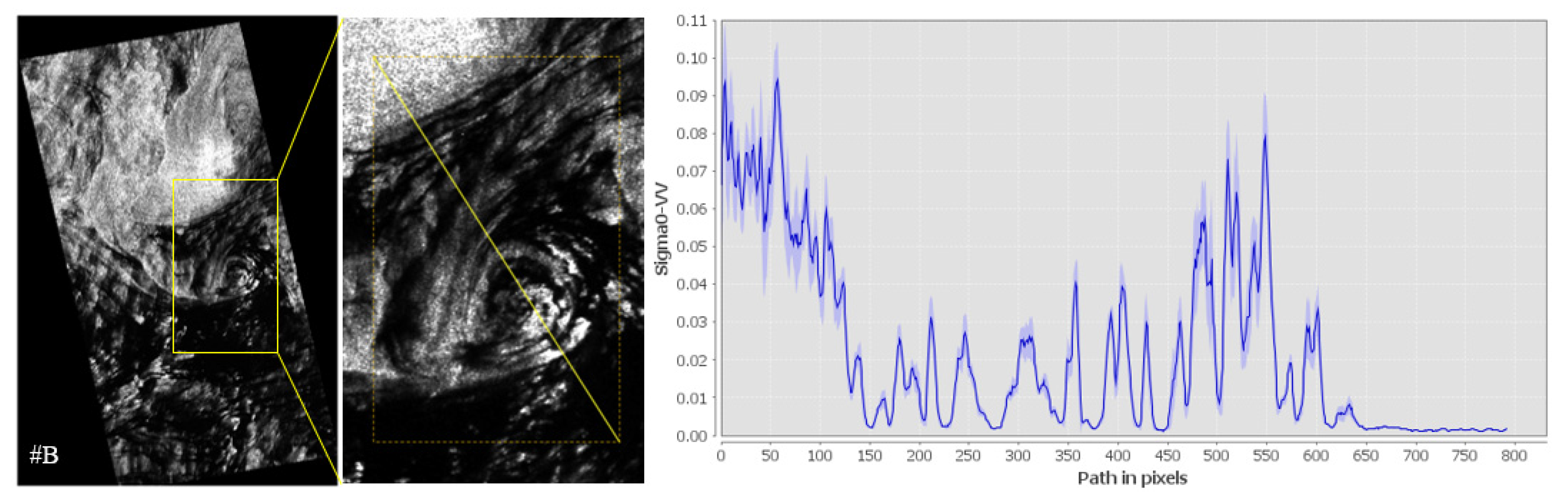
Data #B are located in the Kuroshio region in the northwest Pacific Ocean, which has a complex circulation structure. The westward flowing North Equatorial Current reaches the Philippine coast and bifurcates under the influence of topography, forming the Mindanao Current, which flows toward the equator, and the Kuroshio Current, which flows toward the poles. The Kuroshio Current carries hot and salty equatorial water that gradually intensifies as it flows along the Pacific’s western boundary, and this highly energetic boundary current eventually forms the Kuroshio Extension Zone at 35° N off the coast of Japan. Studies have shown that oceanic eddies are often generated along the Kuroshio tide and its extension.
Figure 1b shows the #B VV-polarized backscatter coefficient image. The presence of the oil film produced a significant suppressive effect on short and capillary waves (known as the Marangoni effect) [
46]. This weakened the radar echoes and produced a darker appearance in most areas of the image. The oil film-covered region located in the middle of the image contains a region with a distinct spiral morphology, which we determined to be an oceanic eddy for the following reasons: (1) the area covered by the data was the area where the occurrence of eddy currents was frequently observed, and (2) the morphological combination of the region closely matched an eddy as defined in the literature [
24]. The eddy diameter is about 11 km. It is supposed that the film acts as a tracer, giving the eddy a specific black spiral line pattern. Detailed data are presented in
Table 1.
6. Discussion
The data used in this article were the two FP ALOS PALSAR images (#A and #B) collected from the sea around Japan. These two scenes are covered with suspected
W-E and
B-E, respectively. In terms of eddy existence authenticity verification,
Section 2 discussed the flow field characteristics of the study area, the frequency of ocean eddy occurrence, the eddy formation mechanism, and the resultant eddy shape and then compared the findings with the eddy research data from the other literature [
24]. The results show that the eddy defined in this paper was reliable.
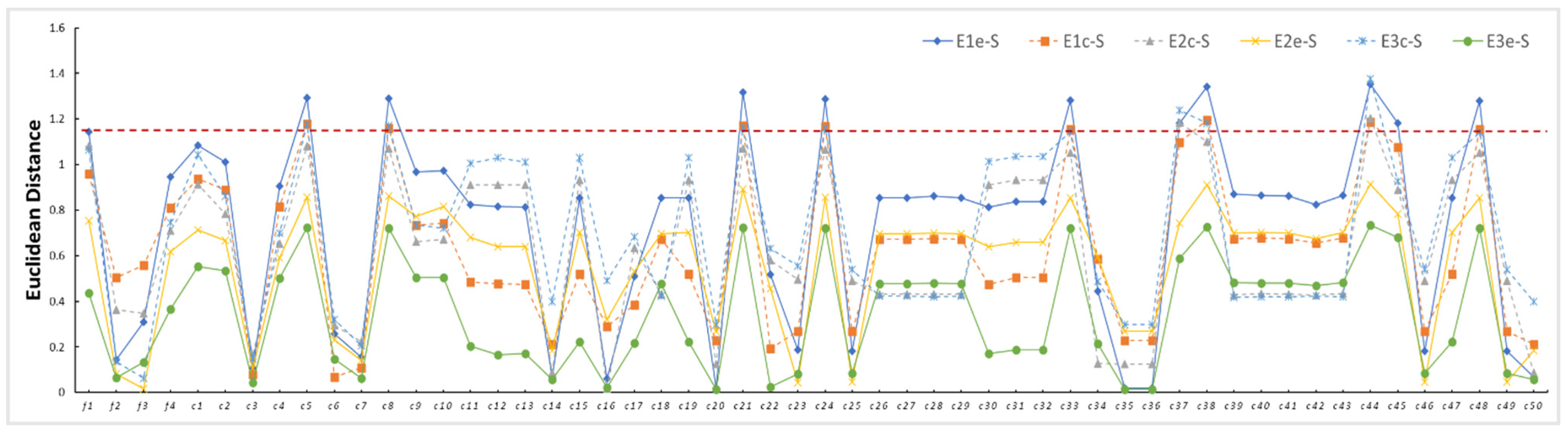
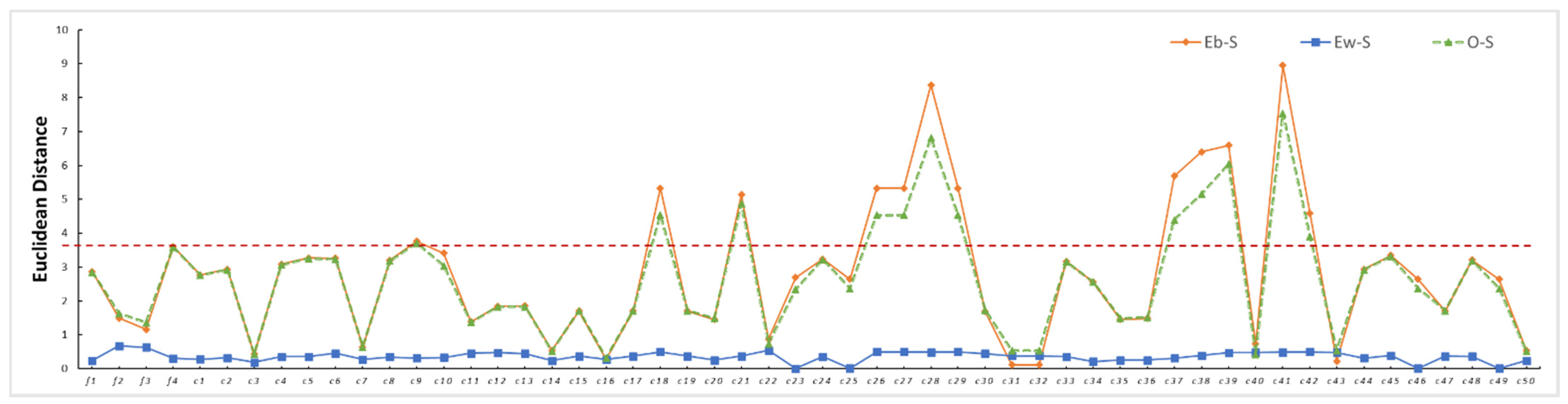
In
Section 4.2, the Euclidean distance was used to analyze the eddy detection performance of 50 CP features. By comparing
Figure 5 and
Figure 7 of that section, we found that the best Euclidean distance between
W-E and the ocean background was only 1.35, which was much smaller than the Euclidean distance between
B-E and the ocean background (average value: 2.84). This was possibly the result of the different imaging mechanisms of the two eddies in SAR as follows. The
B-E is caused by the tracing of film [
61], and the natural film generally appears in the SAR image at low to moderate wind speeds (3–5 m/s) [
62]. At higher wind speeds, the surfactant film starts to disrupt, and as a result, the dark spiral lines representing
B-E disappear. Thus, the eddies appear in the SAR image only as a result of the wave–current interaction along the current shear lines, which manifests as a bright area [
24]. However, it should also be considered that high sea conditions will reduce the contrast between
W-E and the ocean background, thus manifesting itself as a low Euclidean distance. It is worth mentioning that due to the harsh imaging mechanism of
W-E, the amount of
W-E SAR data that could be found was very small. Therefore, most research on eddy detection by SAR application is focused on
B-E. In addition, a similar finding resulted from the eddy detection results presented in
Section 5, namely the detection accuracy of
W-E being lower than that of
B-E. The phenomenon was that the detection accuracy of
W-E was lower than that of
B-E. Therefore, this difference in Euclidean distance and detection accuracy was consistent with the actual situation of the two eddies with different imaging mechanisms.
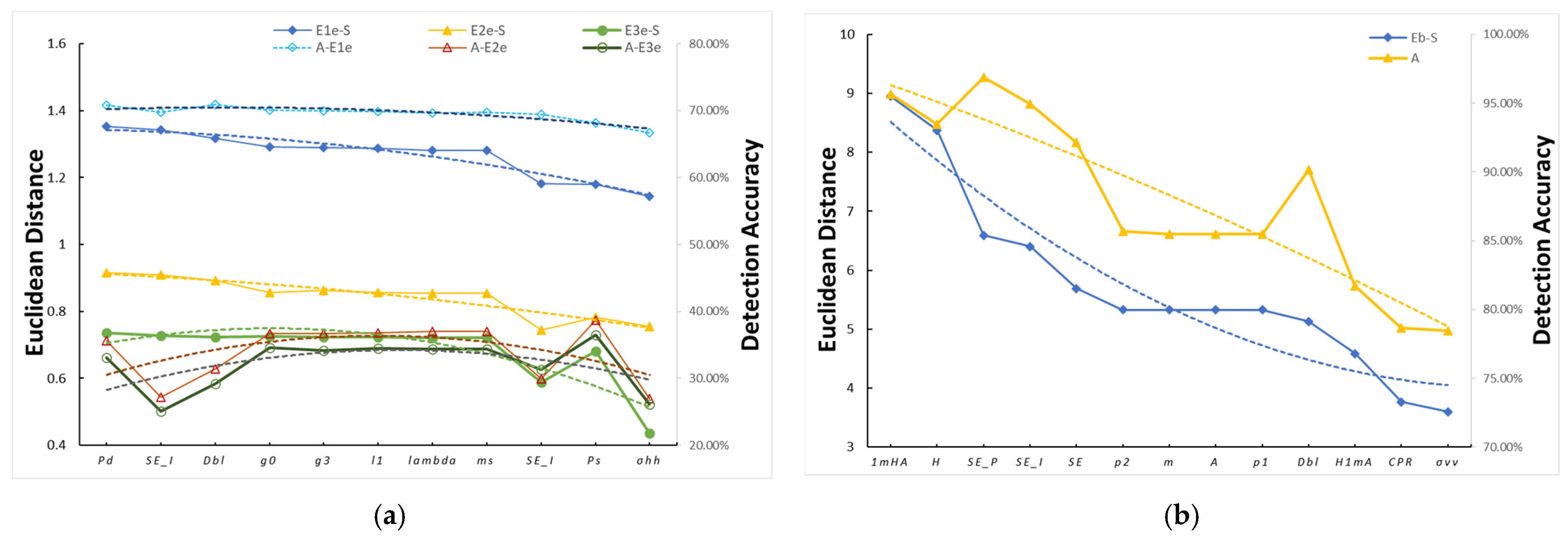
When comparing the Euclidean distance calculation results and the eddy detection accuracy, we found that they were consistent.
Figure 12 gives the variation of the CP feature Euclidean distance and eddy detection accuracy, where the colored dashed lines in the figure are the results of the third-order polynomial fit. The figure shows that for
E-1 and
B-E, the eddy detection accuracy decreased with the decrease in the Euclidean distance, which proves the reliability of using the Euclidean distance to analyze the eddy detection performance of the CP features. However,
E-2 and
E-3 were severely confused with the ocean background, and their accuracy was low and contingent. This means that the detection accuracy did not produce the same trend as the Euclidean distance; however, this does not affect the above conclusions.
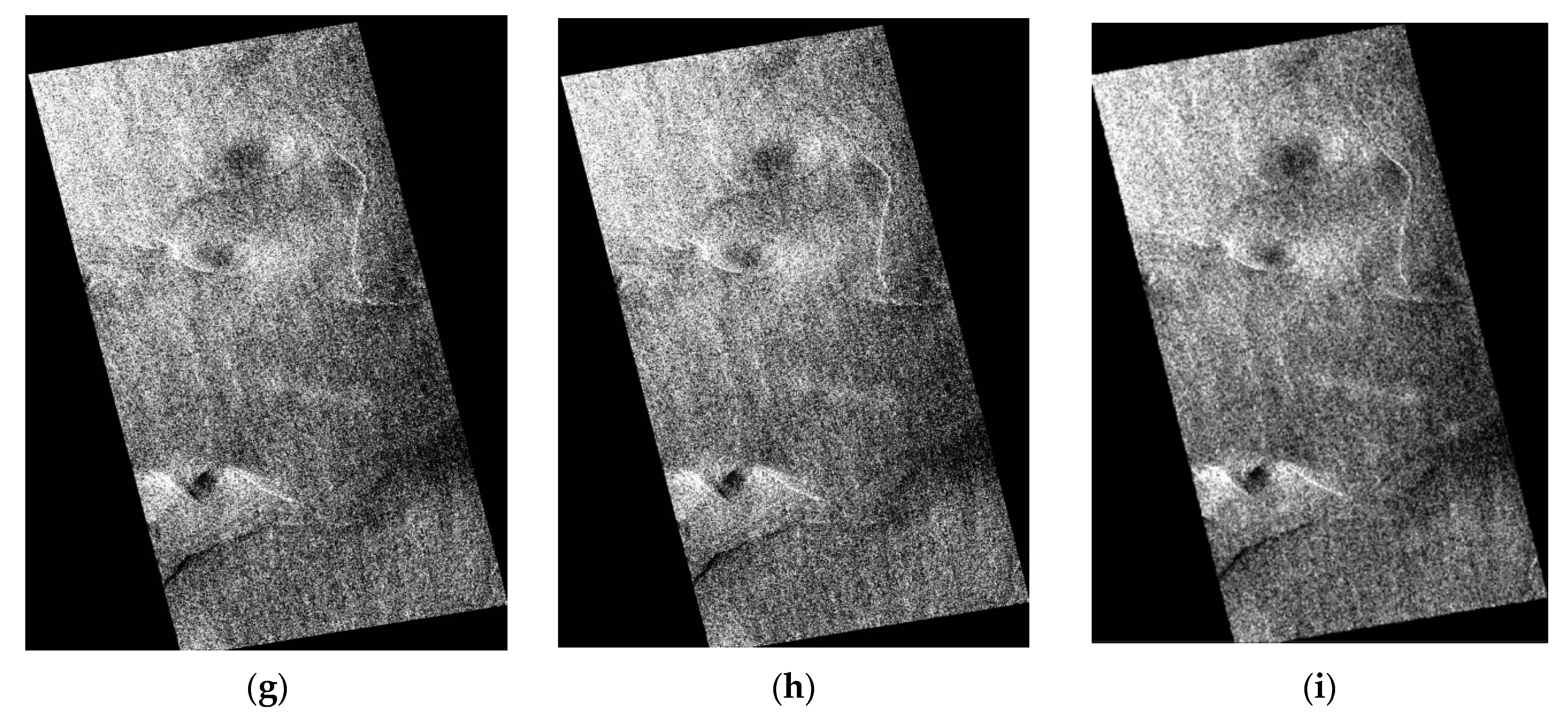
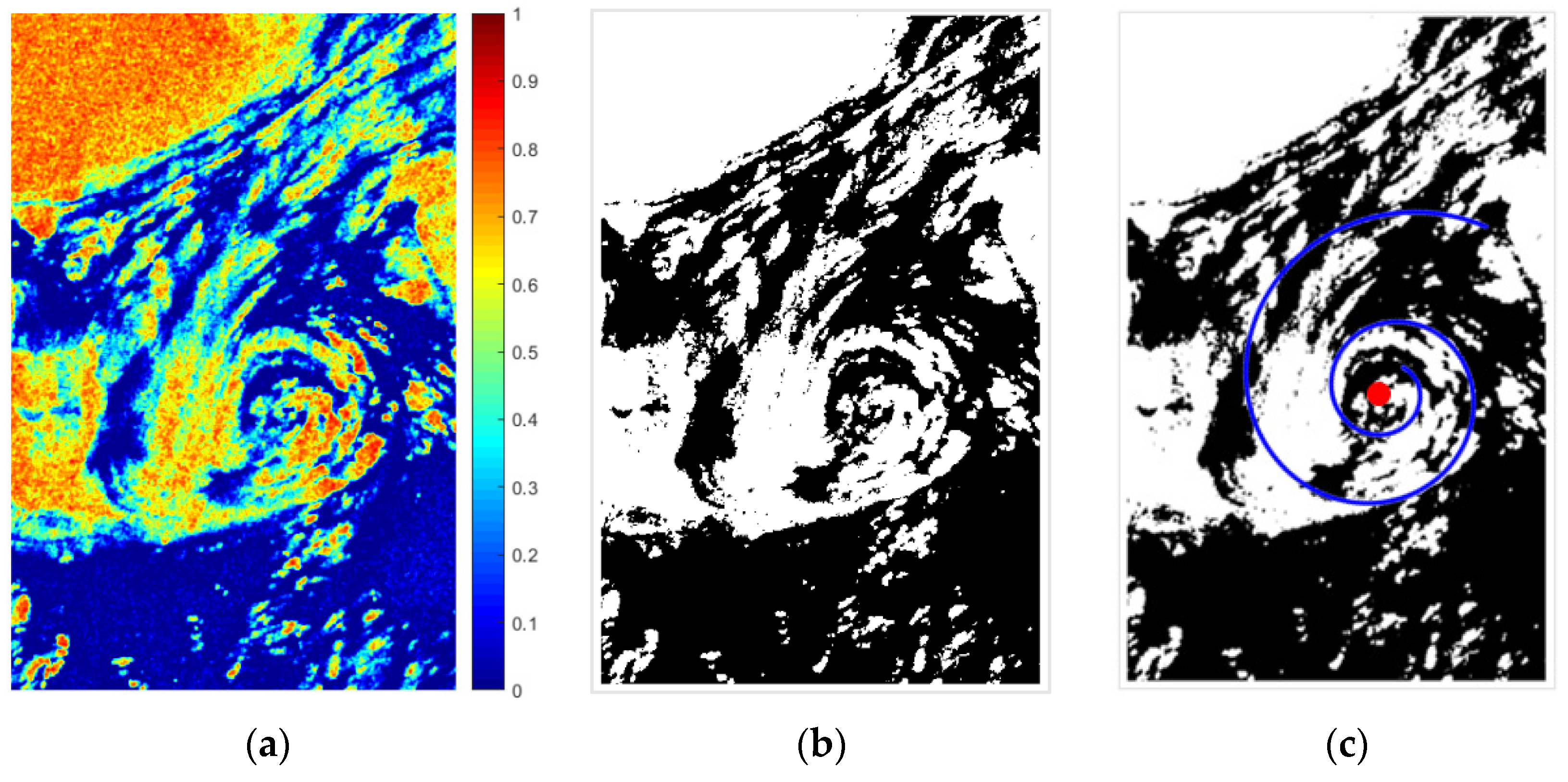
In
Section 5.2, the location of the eddy center was determined in the
B-E detection result (
Figure 11c) using the method based on logarithmic spiral edge fitting for eddy information extraction in the SAR image. The eddy shape described by this method agreed with the actual one, and furthermore, the results of the eddy center’s position agreed with the reference information provided manually. This demonstrates the great application potential of CP SAR in eddy information extraction and eddy refinement structure research.
Compared with satellite altimeters for mesoscale eddy detection, SAR images are more often used to observe sub-mesoscale and small mesoscale eddies (diameter < 10 km). Such ocean eddies are smaller in scale, shorter in duration, and faster in variability, while their edges are more filamentary and irregular, and their formation mechanisms are different from those of mesoscale eddies [
4]. Considering this, compared with satellite altimeters and optical sensors, SAR is not affected by light and has a higher resolution, which makes SAR more relevant for such ocean eddy detection. In future research, we will carry out work on the inversion of the eddy parameters (e.g., eddy center position, diameter, and edge size) using a variety models. Meanwhile, considering the current challenges, such as the surge of SAR data volume, we will combine cutting-edge technologies such as deep learning to develop better SAR eddy detection algorithms.
7. Conclusions
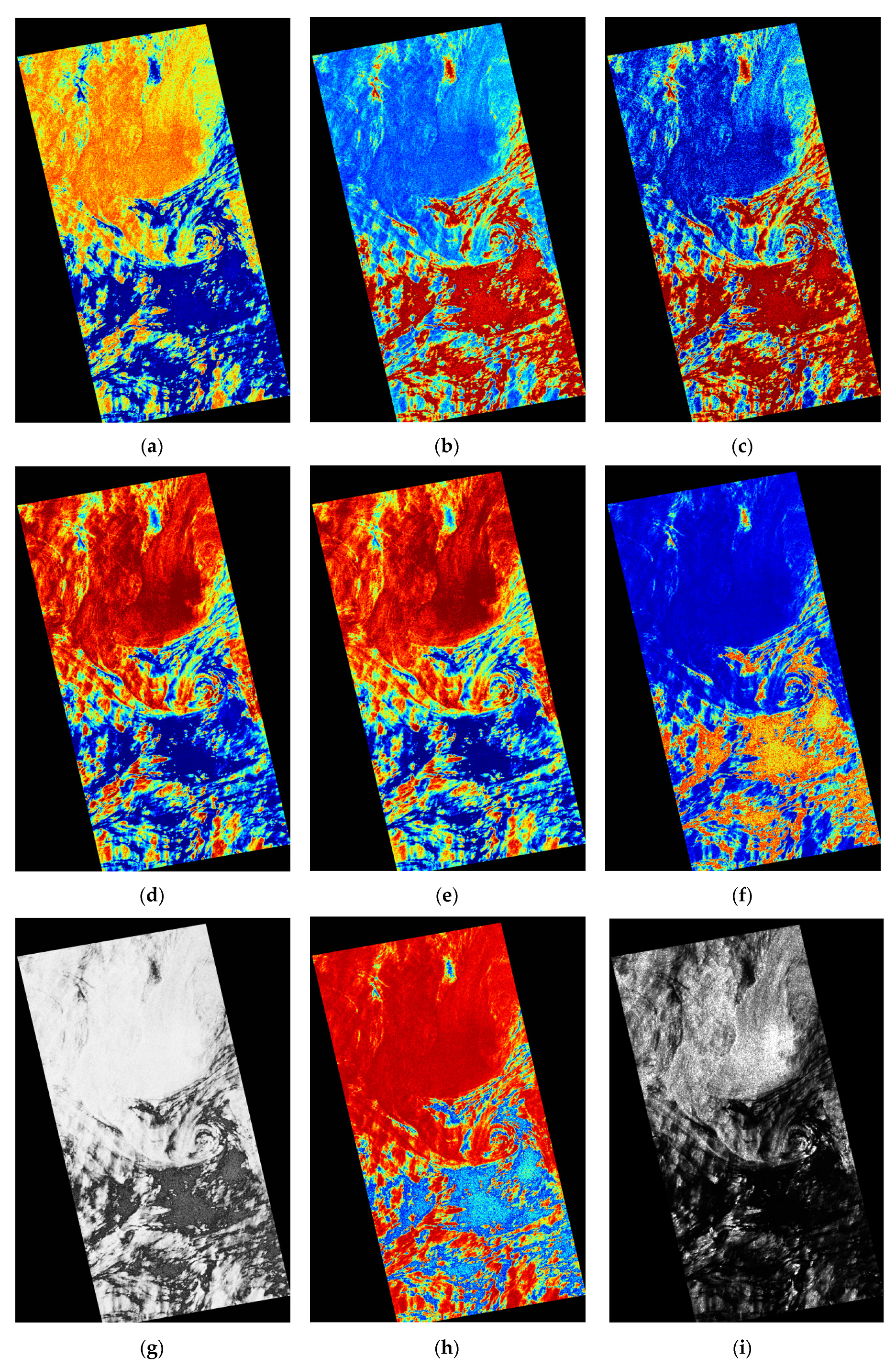
As an emerging direction of polarimetric SAR, the CP SAR adopts a unique DP SAR system, which enables large-amplitude broad observations of up to 350 km and fully preserves the polarization scattering information, giving it significant potential application in the large-scale detection of ocean phenomena and targets. However, relatively few studies have been conducted on eddy detection using CP SAR data. Before this study, the response of CP SAR to ocean eddies was unknown, which severely restricted the application of CP SAR for ocean eddy monitoring. Therefore, in this study, ALOS PALSAR FP SAR data containing W-E and B-E were used to simulate the CP SAR data to evaluate the application potential of CP SAR for ocean eddy identification and dynamic monitoring. Based on this, the performance of the CP features in detecting ocean eddies was further discussed. The results showed that among the 50 CP features, Pd, SEI, Dbl, g0, g3, l1, lambda, ms, SE, and Ps had better detection performance for W-E. Moreover, it was found that m, A, p1, Dbl, H1mA, and CPR could more accurately determine B-E.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}