4. Materials and Methods
4.1. Test Site Description
The experimental validation of our SFCW radar was carried out at the Formigal–Sarrios test site located in the Spanish Pyrenees (42°45′40.6″N 0°23′31.8″W) at an elevation of 1800 m a.s.l. (
Figure 10). The site was the Spanish location established by the Spanish State Meteorological Agency (Agencia Estatal de Meteorología (AEMet)) in the World Meteorological Organization Solid Precipitation Intercomparison Experiment (WMO-SPICE) [
36]. Currently, the site is equipped with sensors to continuously record the meteorological and snow properties. This installation, managed by the territorial delegation of AEMet in Aragon, is an exceptional laboratory for cryosphere studies since it has underground electrical infrastructure, broadband communications, real-time video feeds of the different experiments, a small warehouse with work tools as well as has easy access in the winter, as it is located inside the ski resort Aramón-Formigal. It is a closed area with restricted access and is maintained by the ski resort staff.
It is located in a safe area where a stable snowpack is available from mid-November to May, reaching up to 2 m of snow thickness. Due to its flatness and low exposure to the winds, it has a very homogeneous snow cover through the area of experimentation.
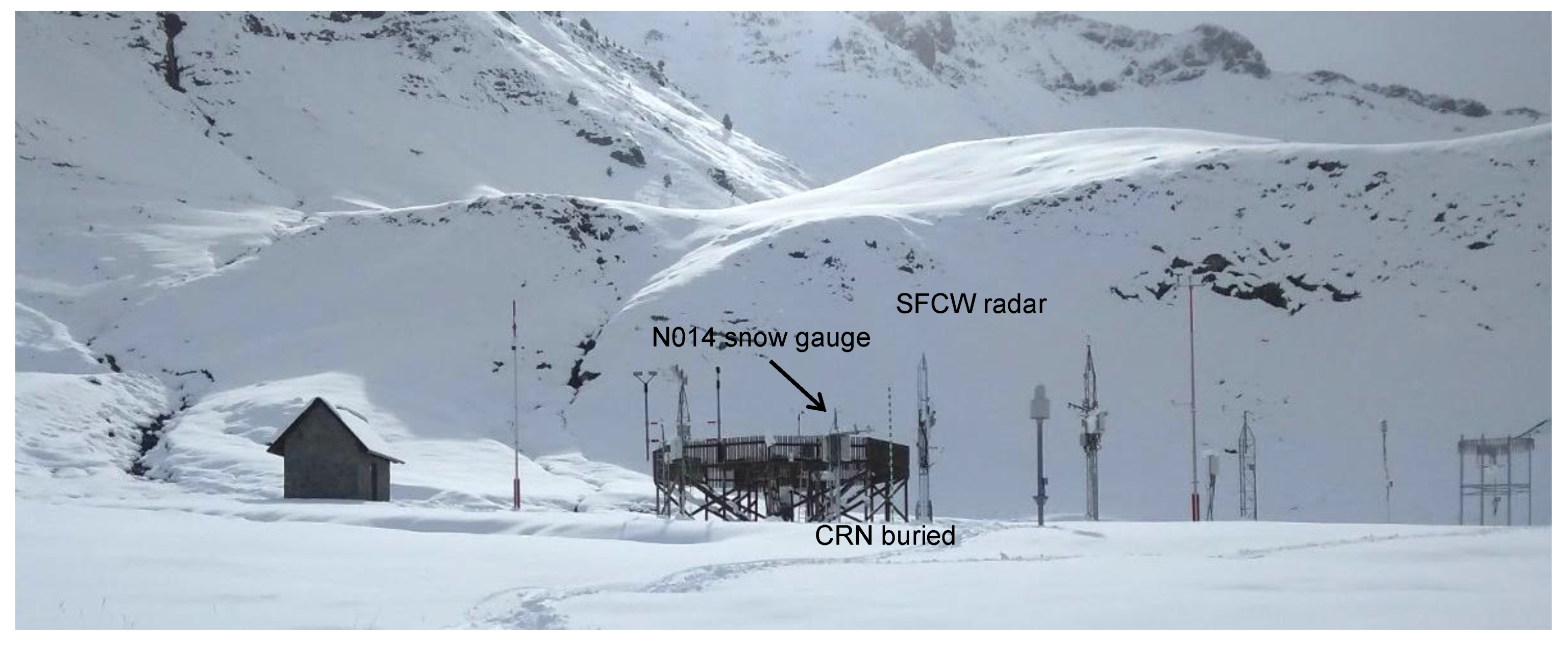
We compared our results with the SWE cosmic ray neutron attenuation gauge (CRN) #N014 [
37] from Automatic Hydrologic Information System of the Ebro River Basin (Sistema Automático de Información Hidrológica de la Confederación Hidrográfica del Ebro (SAIH-CHE)), located 10 m away from the SFCW radar measurement area (
Figure 11b).
4.2. Field Measurement Radar Setup
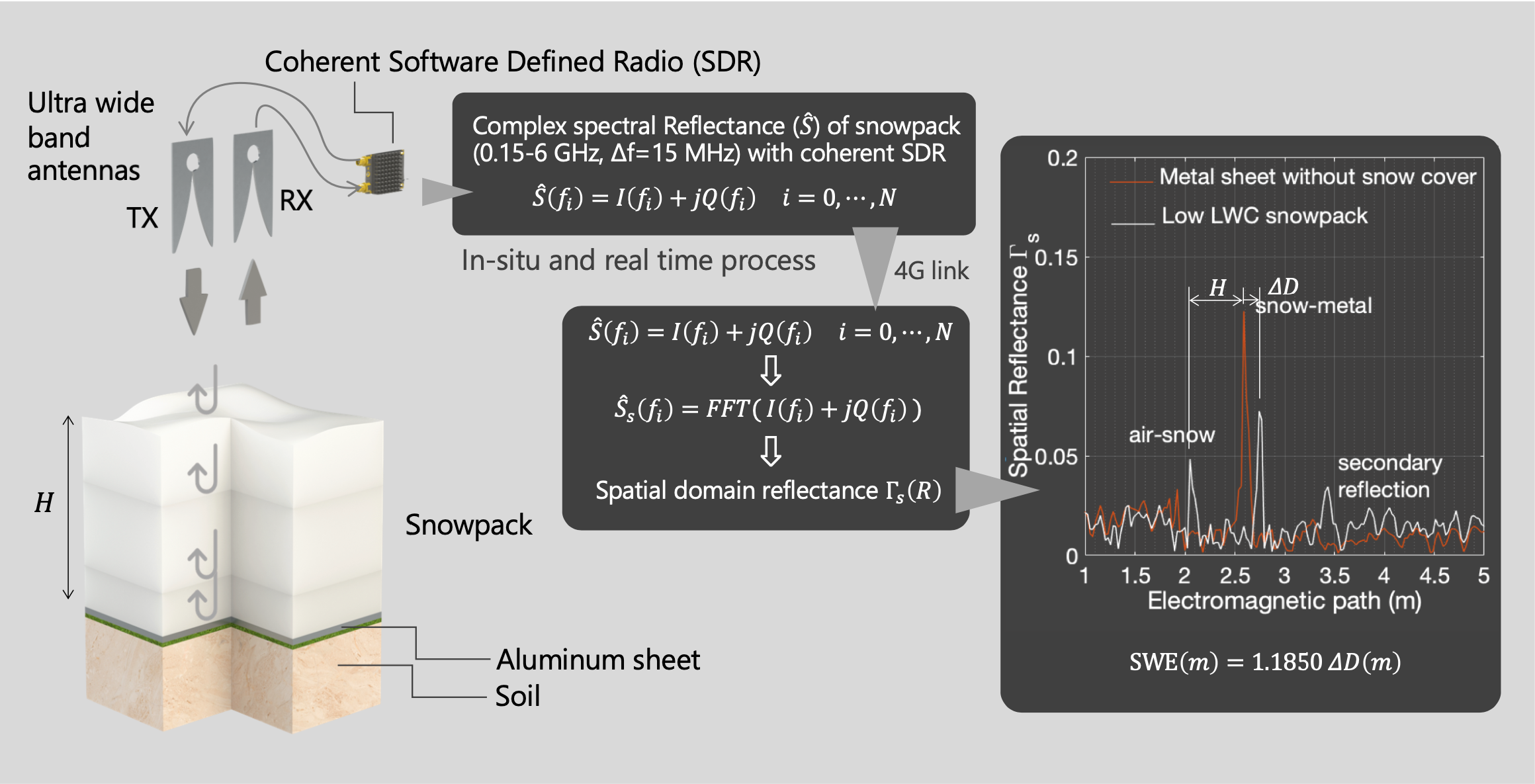
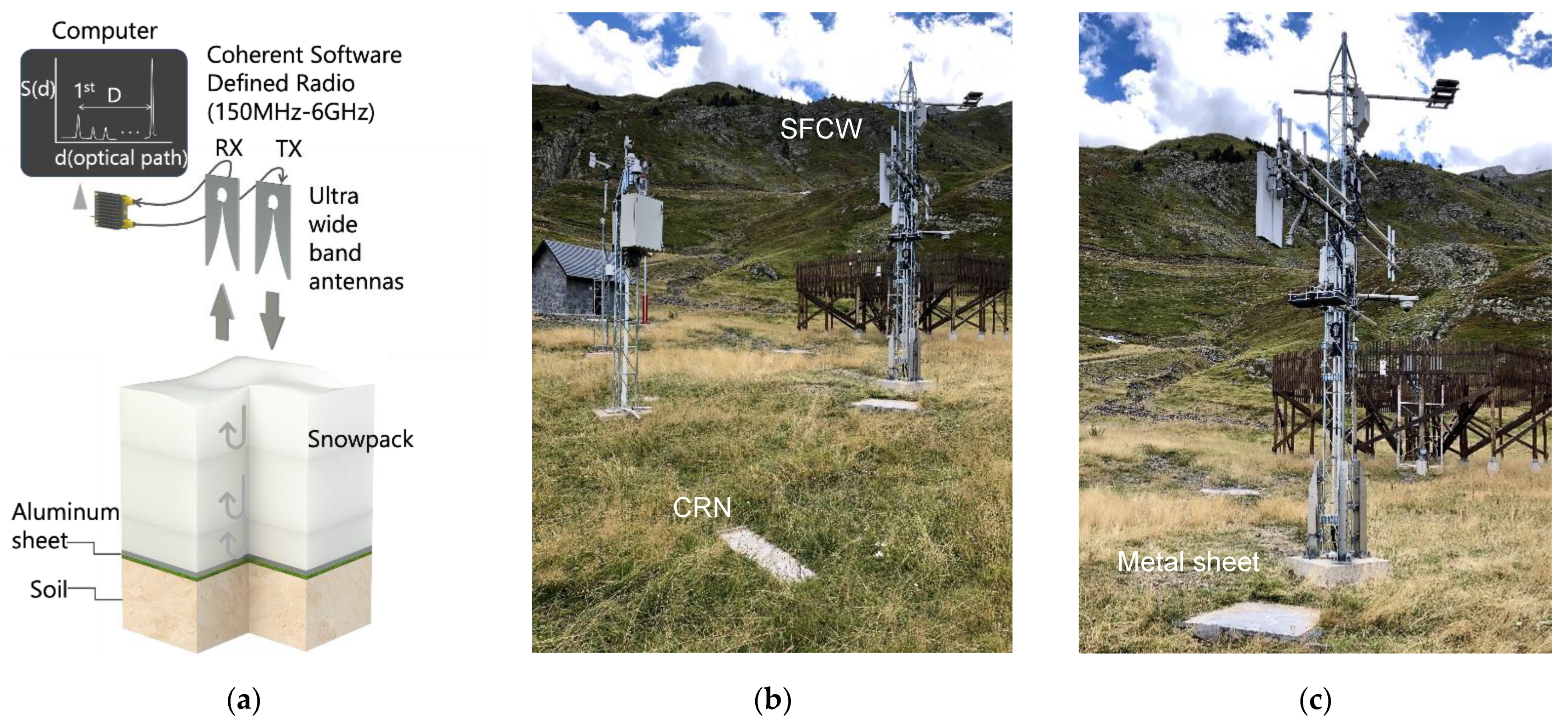
The SFCW radar was implemented using a SDR platform. Currently, SDR is one of the emerging areas of research in low cost and accurate radars. The radio frequency oscillator, the receiver ultrawide band amplifier, the demodulator, and the analog-to-digital converters were programmed in low level software in a high-performance SDR USRP X300 with a daughter coherent board UBX 10–6000 MHz from Ettus Research. The final system was a coherent and full-duplex wideband transceiver that covered frequencies from 10 to 6 GHz (see
Figure 11a). SDR control was performed in C++ from the remote computer located in the experimental field, which also processes the IF signals at each frequency of scan to, finally, obtain the complex amplitude of the reflected signal vs. frequency.
The data are requested by a local computer from this remote system via a 4G link. The FFT of the signals and the visualization is performed on the local computer. Both computers develop their algorithms using MATLAB
®. A detailed picture of the processes being carried out is shown in
Figure 1 in
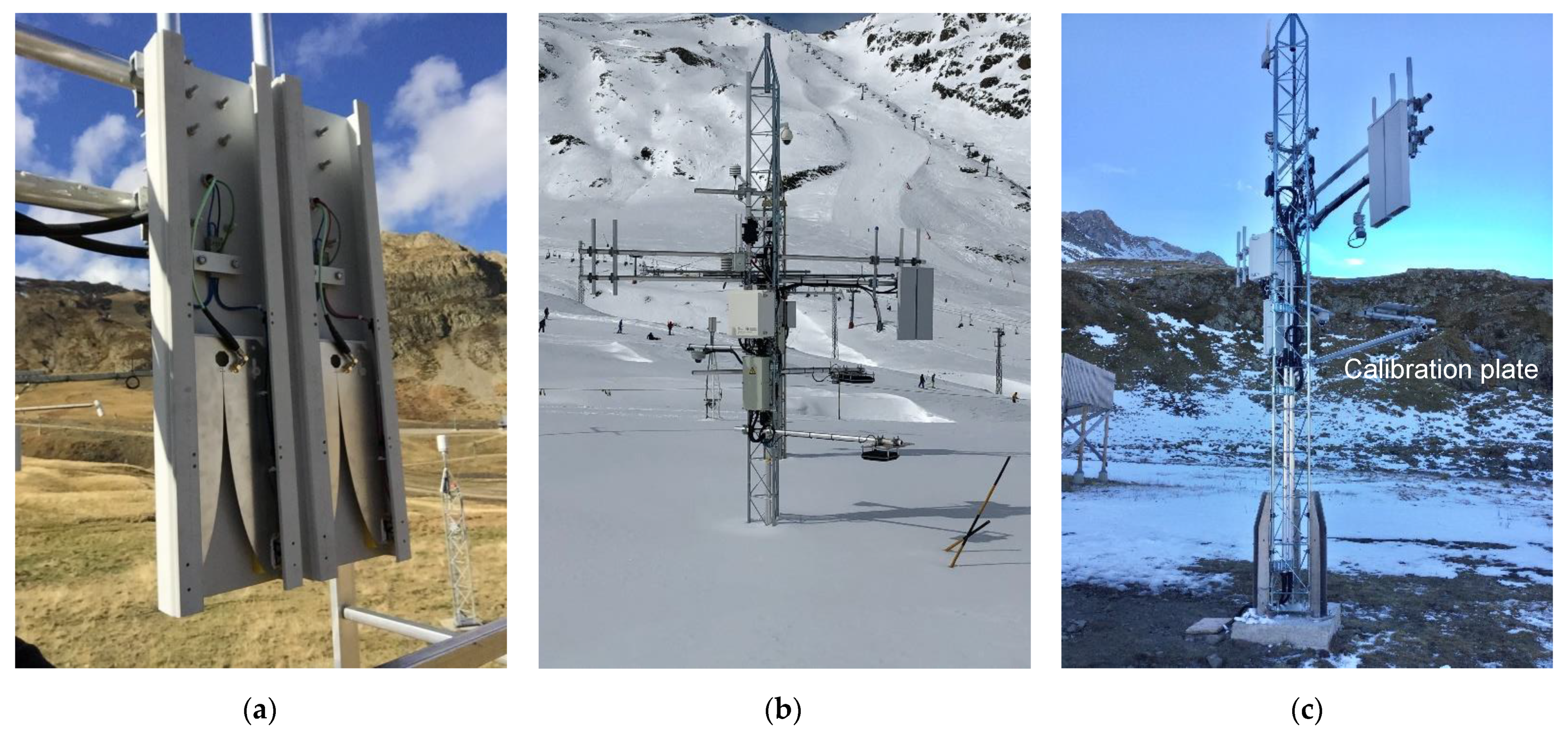
Section 2.1. Finally, the system used aluminum Vivaldi transmitter and receiver antennas (UWB3 from RFSpace) placed next to each other and protected with two radomes. Both antennas also included a heater system (
Figure 12a) to avoid undesirable freezing problems. It has been verified that the radiant parameters (S
11) of the antennas were not modified, from 150 MHz to 6 GHz, by incorporating the heaters.
Finally, an aluminum sheet of 1.5 × 1.5 m (see
Figure 11c) was placed on the ground in an orthogonal direction to the antenna’s axis and was the
n-medium of the stack with an intrinsically imaginary behavior of relative permittivity. This sheet was buried underneath the snowpack during the entire snow-covered period.
Table 1 summarizes the main parameters of the radar.
A small weather station, CR300 unit, and a temperature gauge from Campbell Scientific, was included in the system to systematically record the temperatures and activate antenna heaters when the outside temperature dropped below 4 °C.
For calibration purposes, a temporal metallic calibration plate (CP) was placed at a position between the soil and antennas and represents a virtual position that we call ‘0′ and a reference signal to obtain the spatial reflectance of snow cover. In our system, this was located 254 cm from the metal platform on the soil. This CP was also used to optimize the receiver gain in each frequency of the chirp. The measured file generated, represents a complex amplitude array reference for the succeeding measurements as we will see later. We have selected this position for the definition of the origin to be able to perform calibrations also in the winter period if necessary. In addition, the choice of this origin simplifies the interpretation of spatial reflectance signals by being all of the same sign.
4.3. Measurement Process
The remote computer, controlled by the local computer, runs a C++ program in which the SDR transmitted and received 390 frequencies between 150 MHz and 6 GHz. The duration of this sweep was approximately 80 s. The IF used (fBB) was 31.25 kHz and was sampled at a rate of 3.125 MHz. The received signal at each frequency UI(i,t) and UQ(i,t), was multiplied numerically by the signal at fBB frequency, and low pass filtered to obtain the magnitude and phase of the amplitude received at each frequency. This file, , was sent via the 4G link to the local computer.
The measured spectral amplitude is divided by that measured with the calibration plate,
. The spectral reflectance is, then, calculated as
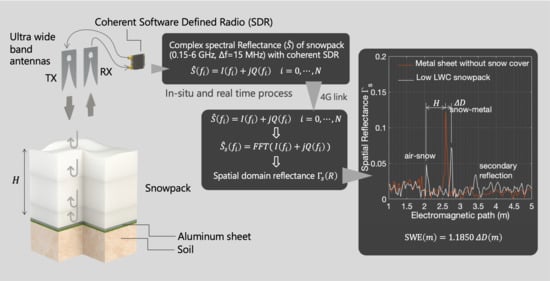
Subsequently, the FFT of was performed to obtain the spatial reflectance, , the file with time and date identification was archived, and a real-time graphical representation was made. The definition of reflectance given in expression 18 requires the use of plane waves according to the theoretical model. In the experimental situation, this is not possible due to the proximity of the antennas to the snow cover, so the experimental reflectance given by (26) is not exactly that given in (18), but in normal incidence will be proportional. For this reason, we have not used a different symbol for both cases. In the graphs, , vs. electromagnetic path the most important information is the spatial position of the peaks and their relative magnitudes.
On 25 January 2019, before the first important snowfall of 2019, the SFCW radar was operative. A previous series of measurements of the distance of metal sheet on the soil (2.54 m) were made with the radar to later obtain the height of the snow cover.
In
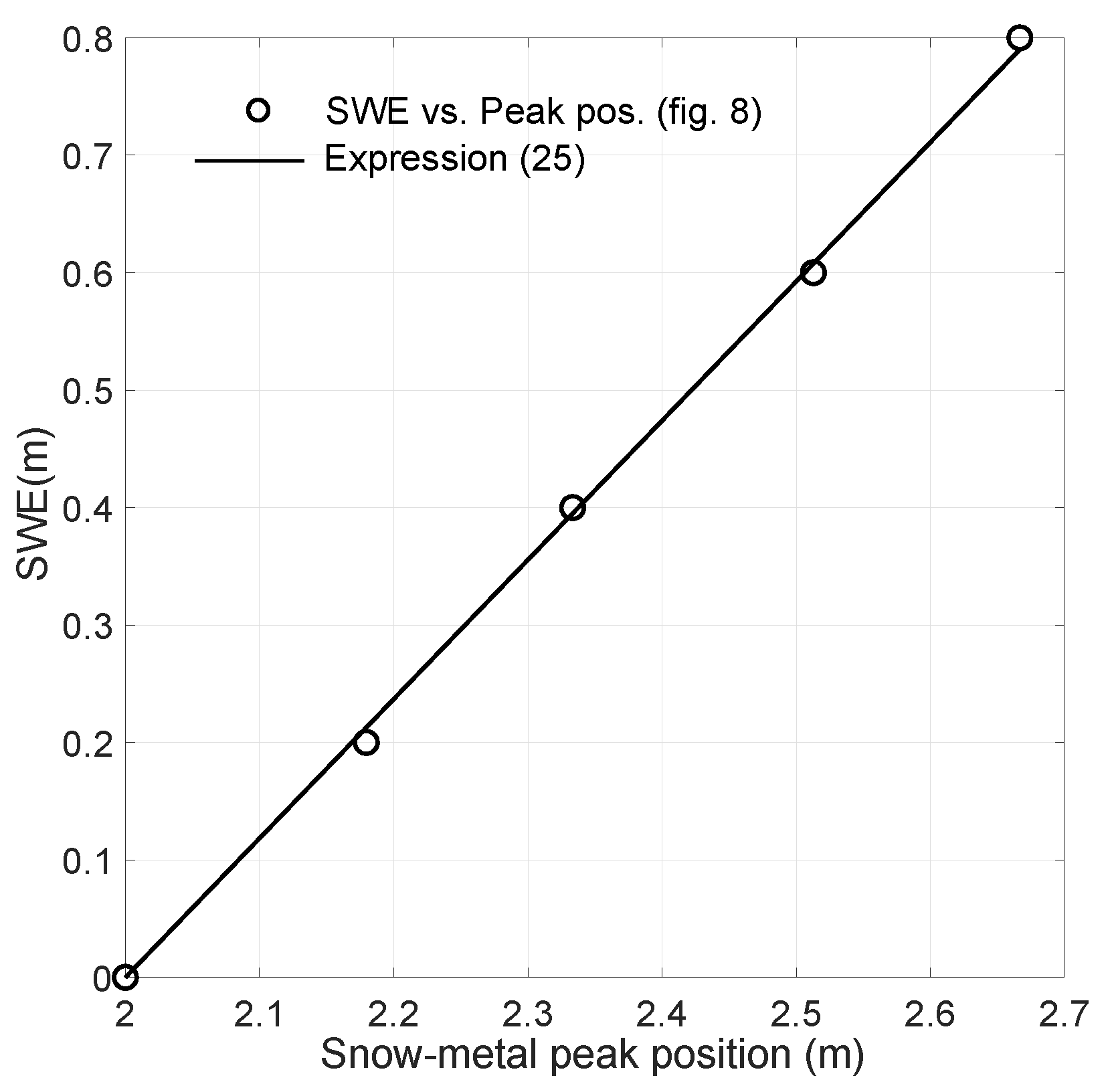
Figure 13a, we can see the comparison between the measurement of the position of the sheet without snow cover, and the reflectance with a thickness of 61 cm of snow. The reflectance position on the snow–metal interface moved to the right as a result of the increased flight time due to the refractive index of the snow cover. Reflection on the air–snow interface was also observed symmetrically, from which it is possible to deduce the geometric height of the snow cover. According to expression 25, we can, thus, obtain the SWE. The position of the first peak associated with the air–snow interface was 1.923 m, and considering that the reference position of the sheet metal was 2.538 m, we obtain a depth of 61 cm. On the other hand, the displacement of the snow–metal interface was 2.667 m − 2.538 m = 0.129 m. Expression 25 allows us to obtain the SWE as 0.129 × 1.185 = 0.153 m.
The reflectance simulation by means of the matrix model was superimposed. To fit the theoretical reflectance to the experimental one, it was necessary to adjust the density of the layer of height 0.61 m, to 0.26, and then the SWE using expression 21 is 0.26 × 0.61 = 0.158 m, which is similar to the previous result and confirms the validity of the proposed model.
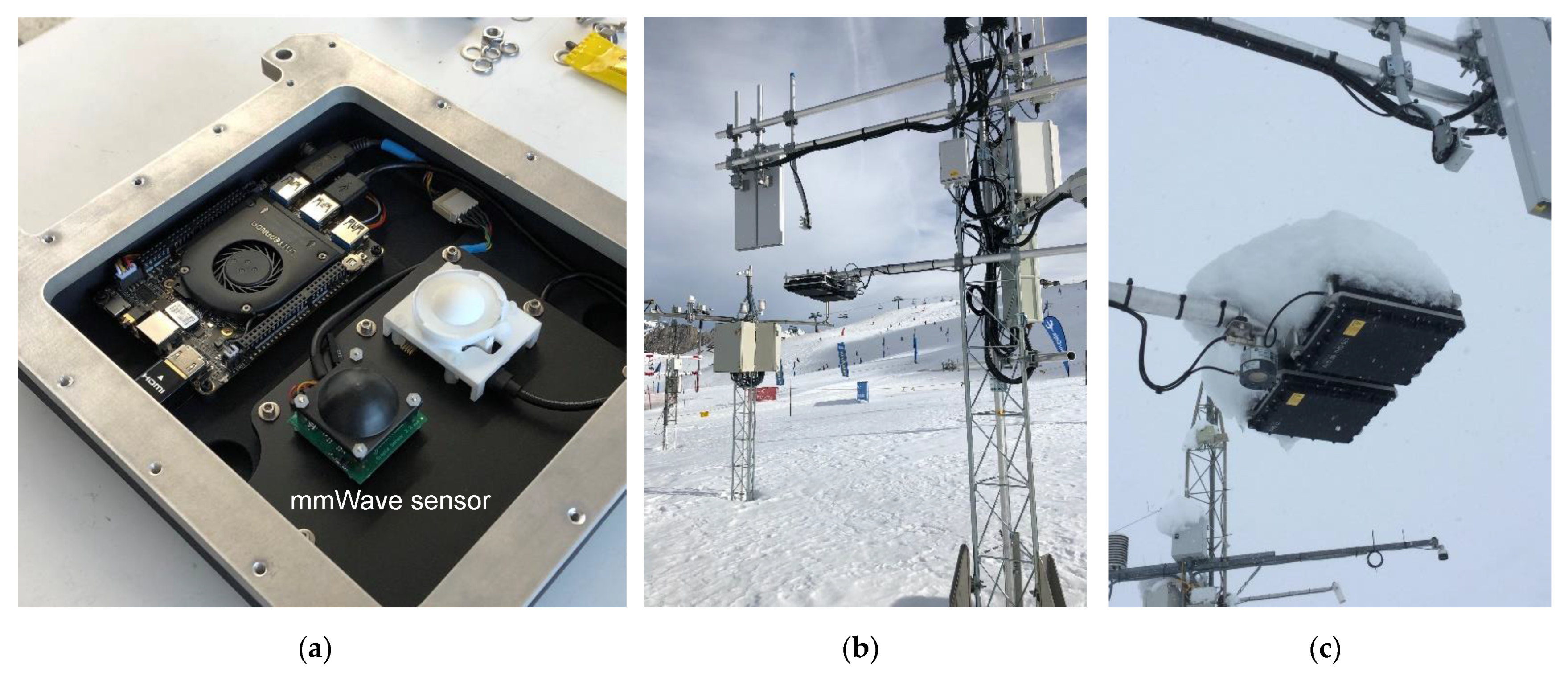
4.4. Milimeter Wave Radar Depth Sensor
In January 2020, to reinforce the measure of the snow depth, we incorporated a millimeter wave radar sensor (mmWave). The rapid evolution of radars has generated, in the last years, the so-called mmWave sensors, characterized by their small dimensions, low cost, and high processing performances, which were unthinkable a few years ago. In many of them, the transmitter, the receiver, the antennas, the low noise amplifier, the mixer, and the pre-processing are included in a single chip.
Currently, we use the sensor MMIC TRX_120_001 of Silicon Radar [
38]. This integrated circuit operates in the band for industrial, scientific, and medical (ISM) purposes of 120 GHz (λ = 2.5 mm). These components, halfway between photonics and microwaves, are practically handled as photonic devices and components based on plastic materials—such as lenses, guides, etc.—are typically used in this technology. Due to its rapid development, the application fields are yet to be determined. An example of this fact is the application proposed.
Snow height measurement is typically performed using ultrasonic sensors by measuring the flight times of a pulse emitted by the transducer and reflected by the snow surface. However, the low acoustic reflectance of the first layer, in particular, in the case of fresh snow with a high air content, is very small, generating noisy signals. In addition, achieving good accuracy requires compensation of the propagation speed with the temperature, which greatly complicates achieving high accuracy.
The use of an FMCW radar at 120 GHz and a bandwidth of 6 GHz, based on Silicon Radar MMIC TRX_120_001 IC, at a normal incidence toward the snow allowed us to obtain sufficient accuracy to verify the height measurement of the SFCW radar. As we have already seen in the examples calculated with the matrix method, the reflectance of the first snow layer in the 1–6 GHz band was very small. This is a consequence of the slight change in the refractive index between the air and the first surface of the snow cover, especially for low-density, fresh snow. However, at frequencies of 120 GHz, there is a low penetration of waves in the snowpack, as the relative permittivity models foresee; nevertheless, there is a strong surface reflectance dominated by diffusion rather than optical reflection by the refractive index change. This effect is a consequence of the use of wavelengths comparable to the surface grain of the snowpack. In
Figure 14, we can see the implementation of this auxiliary system.
5. Results
In this section, we describe the main results obtained during the winter period from 1 November 2019 to the 1 May 2020.
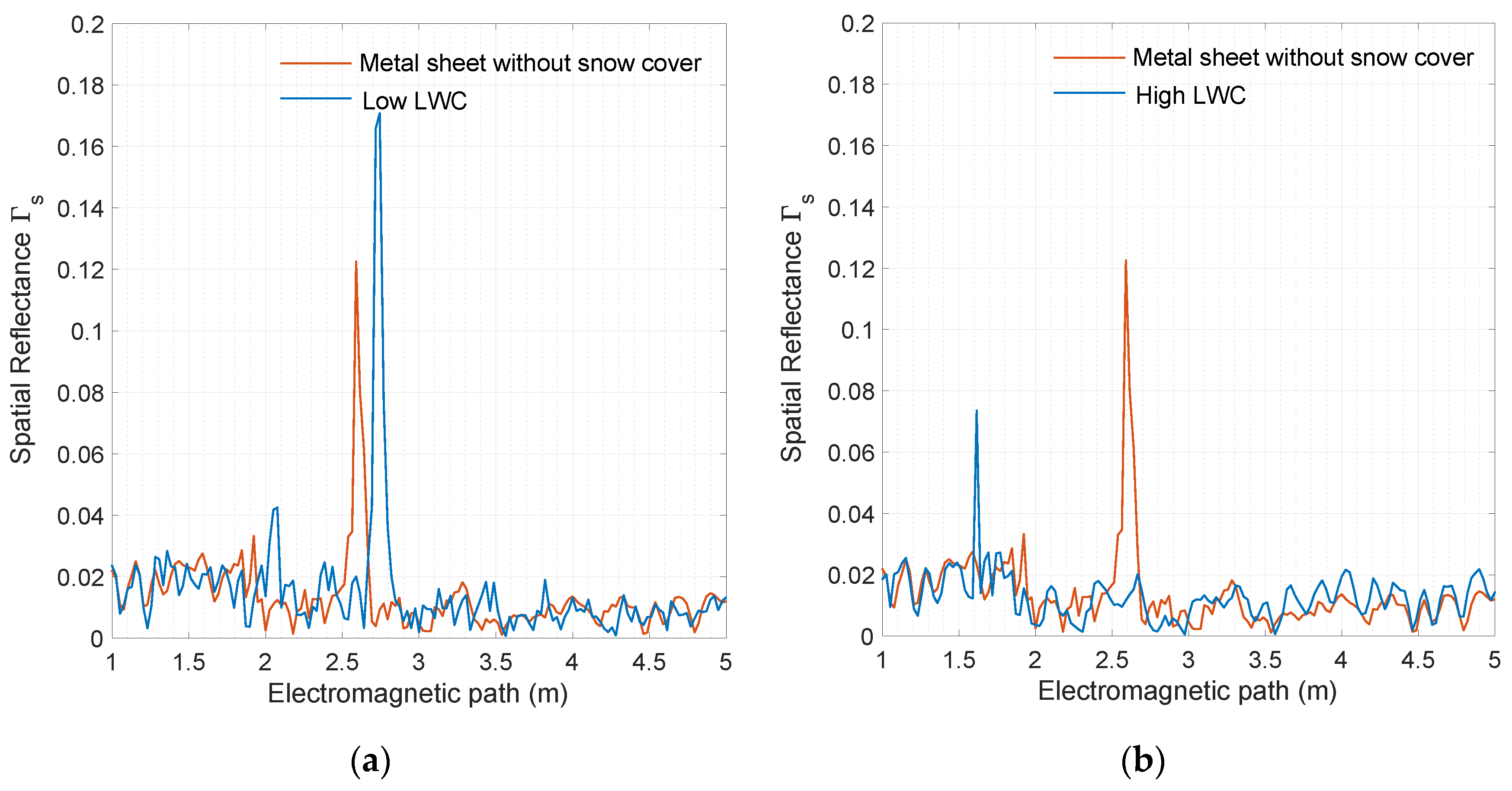
Figure 15 shows two examples of range profiles made on the 1 and 20 of March 2020. The orange curve represents the reflectance of the metal sheet registered before the winter period. This is the reference reflectance for the measurement of the geometric height,
H, as well as the SWE of the snowpack.
Figure 15a clearly shows the profile of a signal as predicted by the matrix model of the snowpack: an important reflectance of the snow–metal interface and a smaller one corresponding to the air–snow interface, as well as the secondary reflection close to 3.5 m of the electromagnetic path. This measure corresponds to a period with low night temperatures, which implies that at the LWC of the snow was small, which justifies the appearance of the secondary reflection.
We observe a lower height of the reflectance of first peak compared to the snow–metal one, as predicted by the matrix model (see
Figure 5a).
Figure 15b shows the measure made in the early morning of the 20 March, after a period of high temperatures even at night. In this case, we see a more intense reflectance peak than in the previous case associated with air–snow reflection, the disappearance of the snow–metal interface reflection, and, of course, the secondary reflection. This situation corresponds to the one shown in
Figure 6a, but with a LWC greater than 4%. In this situation, it is not possible to measure the SWE; however, it is possible to measure the geometric height.
In these figures and the following ones, it is not possible to see the transitions between layers as seen in
Figure 5b of the model. These internal reflections are very small and, to see them, we would need to improve the signal-to-noise ratio of the radar. However, it is also possible that the strong transformations produced in the snowpack in the Pyrenees, with wide thermal fluctuations and strong solar irradiations can produce smoothing of these interfaces and transform the multilayer structure to a single-layer structure, from an electromagnetic point of view, in a short time.
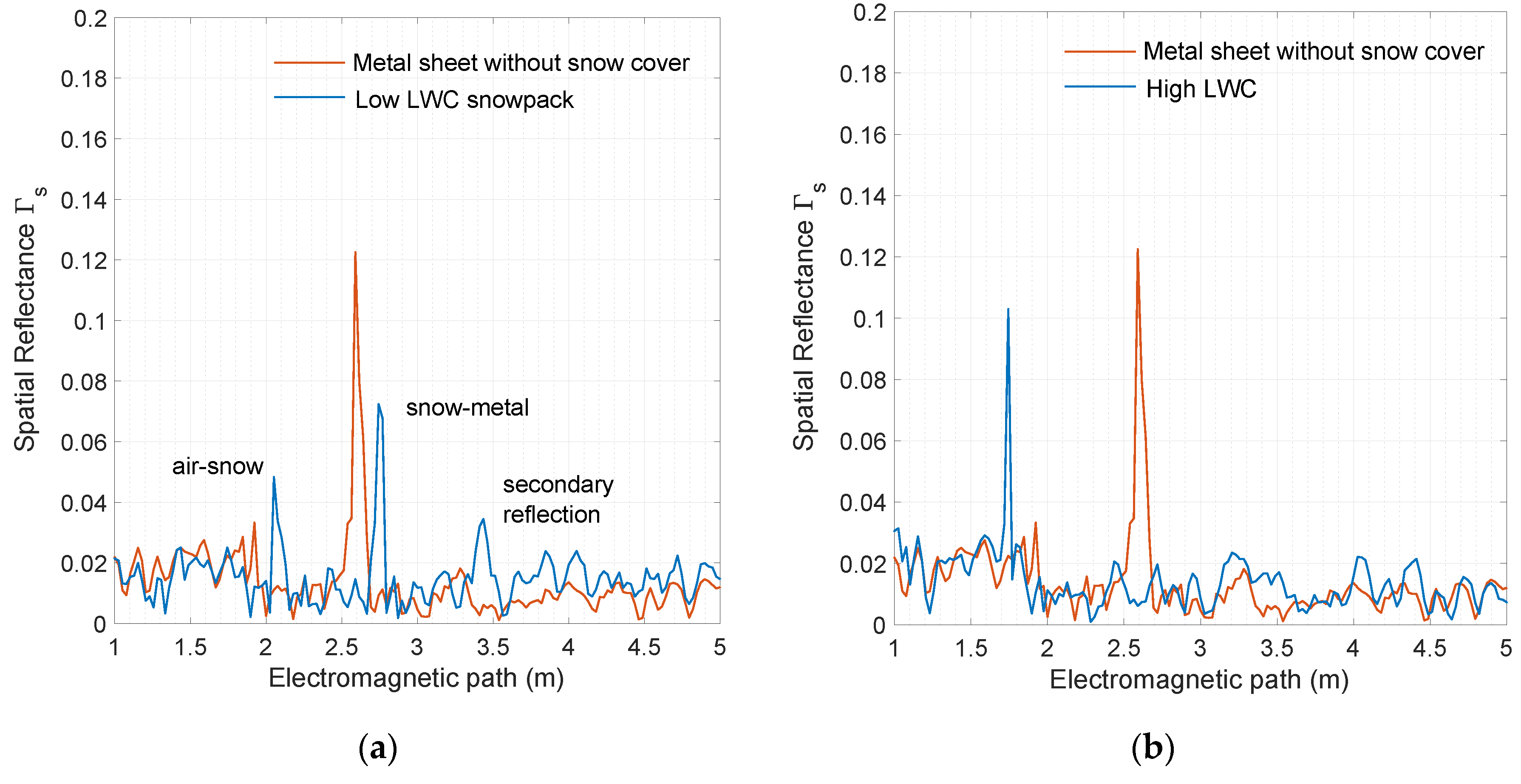
In
Figure 16a, we depict the measured range profile from 8 March, after a significant snowfall, and an elevation of temperatures with an increase of the LWC, also produced a very wet surface layer magnifying the air–snow reflectance even more (see
Figure 6a). However, in
Figure 16b, just a few hours later, in the early morning of 9 March, we observed the refreezing of the structure, with a decrease in the air–snow reflectance, due to the reduction of the LWC, and the appearance of the displaced snow–metal reflection, 2.92 m − 2.54 m with respect to the reference reflectance, indicating about 0.44 m of SWE according to expression 25.
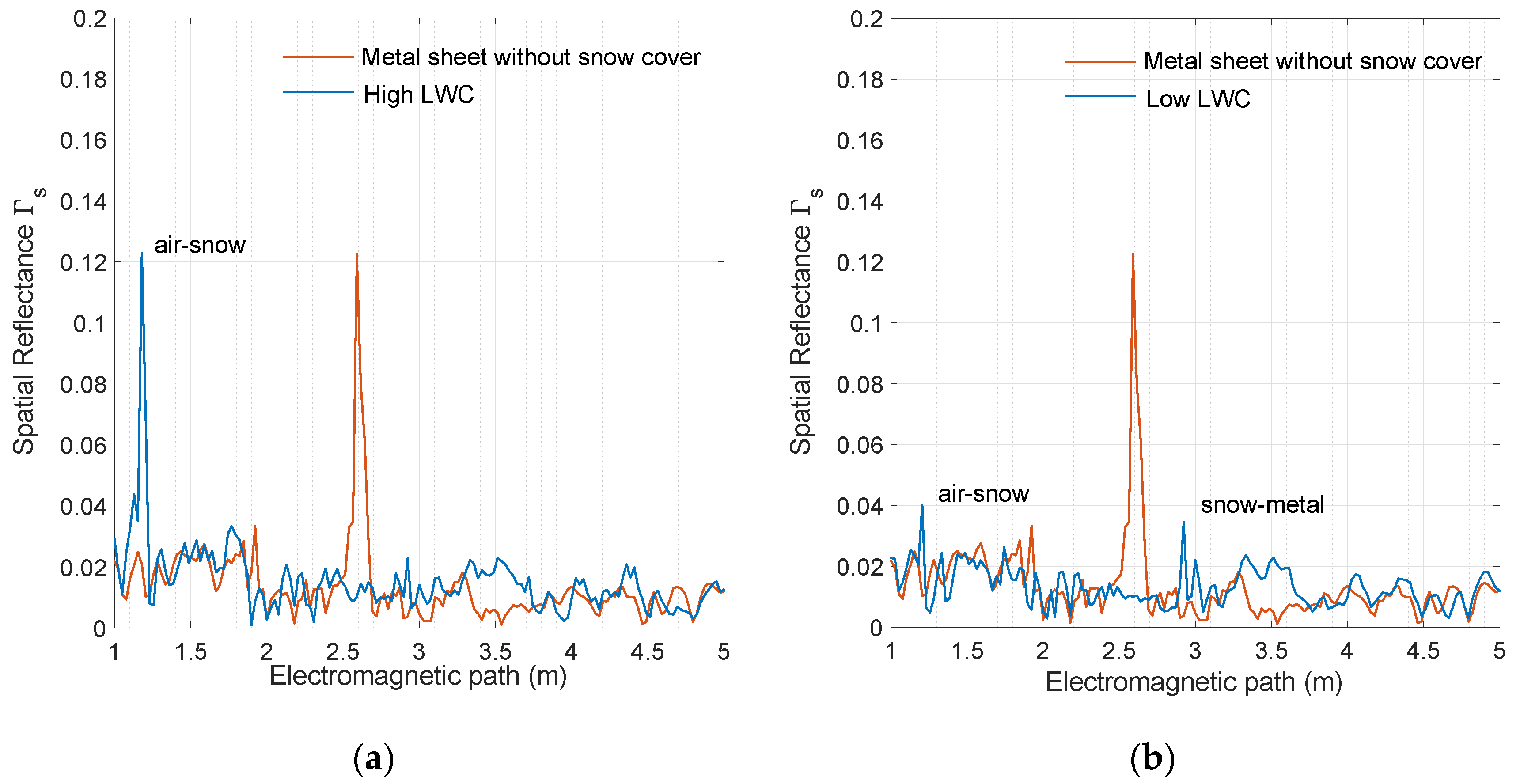
In
Figure 17, we can compare the profiles of reflections of a cold period (20 January) that was somewhat sunny, where dry and little-transformed snow predominates, with a warmer period (1 April) with a high content of liquid water. In the first case (
Figure 17a), the lower air–snow reflection was lower than that of the snow–metal, which moved to the right. In
Figure 17b, we only see a reflection on the upper face of the snow cover.
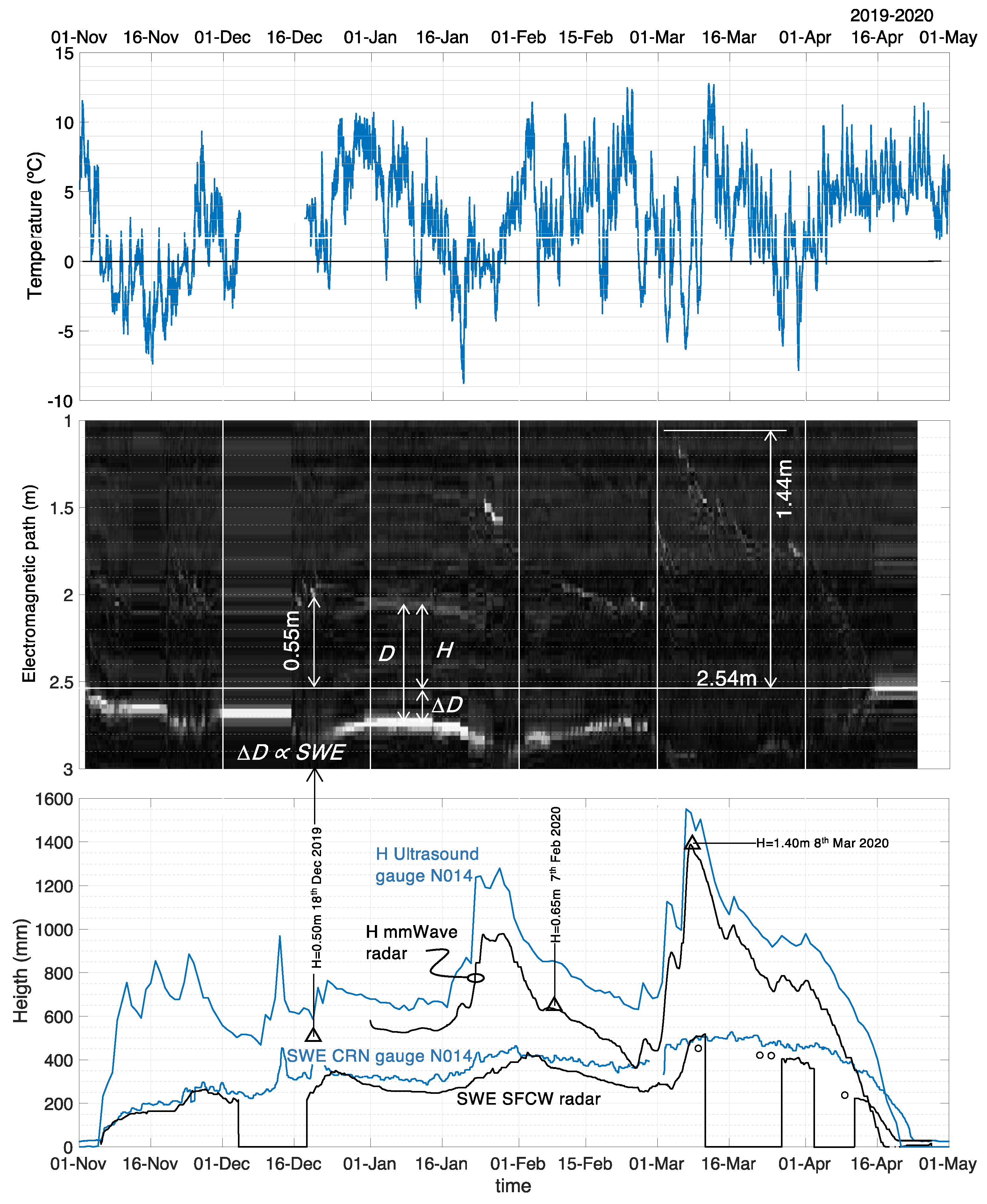
Figure 18 shows a summary of the conditions under which the experiment was developed. The upper graph shows the temperatures recorded throughout the measurement period. This information is important since the snowpack is exposed to periods with temperatures higher than 0 °C, even at night.
The central chart represents an image of the space-time profiles recorded over the measurement period. In this image, it is possible to appreciate the time intervals in which the reflections of the air–snow interface or the snow–metal interface predominate.
In the lower image, the measured depths of snow cover and the SWE are represented. Depths measured with an ultrasonic sensor located in the position of the CRN probe, are compared with the measurements carried out with the mmWave sensor described in
Section 4.4. Finally, the comparison between the SWE measured by the CRN probe and that obtained from the spatial profiles by measuring the displacement of snow–metal reflection in accordance with the expression 25 is shown.
We observed in the central image that, toward the end of the winter period, the reflection on the metal sheet was weaker due to the greater LWC compared with in the early part of winter. However, it was possible to find areas where the reflection was recovered, and it was, therefore, still possible to obtain the SWE. In the central chart, it is not possible to see them; however, a detailed analysis of the profiles allows one to locate those reflections. We have represented them by points in the graph below in
Figure 18. This effect focuses on the periods located in the second half of April and the first fortnight of May, in which only some useful points can be recovered.
In the center chart, a reference line was plotted at the 2.54 m position, and the magnitudes of interest provided by this chart are indicated. First is the geometric height, H, which is the distance between the reference line and the upper reflection (air–snow). The maximum height reached in early March is also noted. Secondly is the electromagnetic path, D. Finally, the displacement of the reflection of the snow–metal interface, ΔD, represents the variation of the electromagnetic path from that in the air. This distance directly contains information about the SWE of the snowpack, regardless of the height of it.
The lower graph depicts the depth of the snow cover measured by the ultrasonic sensor located in the position of the CHE tower N014 (blue) and the one measured by the mmWave sensor (black), located about 10 m from the previous one, and which became operational in January 2020. We can see differences of about 20 cm that were proven to correspond to the irregularity of the terrain.
However, several manual depth measurements were also made in the SFCW measurement area, and the correct height measurement was checked. Manual depth measurements are represented with triangles. The first measurement, with a portable depth rod, took place on 8 December 2019, when the mmWave sensor was not yet installed; however, the information can be checked with that provided by the SFCW, being coincident with the manual testing. This comparison is possible for other points, being correct as well.
The two lower curves represent the SWE provided by the CRN gauge (blue) and the SWE obtained by the SFCW radar (black), which was slightly lower than the previous one. Again, the terrain irregularities between the two measurement points would justify this difference. The presence of the metal sheet can modify the drainage properties of the natural soil, retaining more liquid water. This effect would explain that, in some periods, there was the same accumulated water with less snow height. This situation must be corrected in the future, replacing the opaque sheet metal with a semi-buried wired metallic mesh that modifies the properties of the natural soil as little as possible. As the minimum wavelength in the vacuum used by the radar SFCW is 5 cm, a wired mesh with centimeter-order openings would remain effective as a reflector and would not significantly modify the natural soil drainage.
In the second half of April, there was a mismatch between the height and SWE measurements for both the radar SFCW and SAIH-CHE’s N014 system. This is because the height sensors are closer to the towers than the measurement position of the SWE. This fact is not significant for thicknesses greater than 20 cm, but for lower thicknesses, the tower carrying all the elements acts as a hot spot making the snow layer disappear more quickly in its vicinity than in the measurement area of the SWE.
On the black curve, there is a period between 4 and 17 December in which the SFCW system was not operational.
6. Conclusions
This work shows the validation of the proposed SFCW radar technique, based in a RDS system, and an electromagnetic model of snowpack, to obtain its SWE and depth, in real time, for hydrological purposes. The RDS technology has been shown to be adequate for this application.
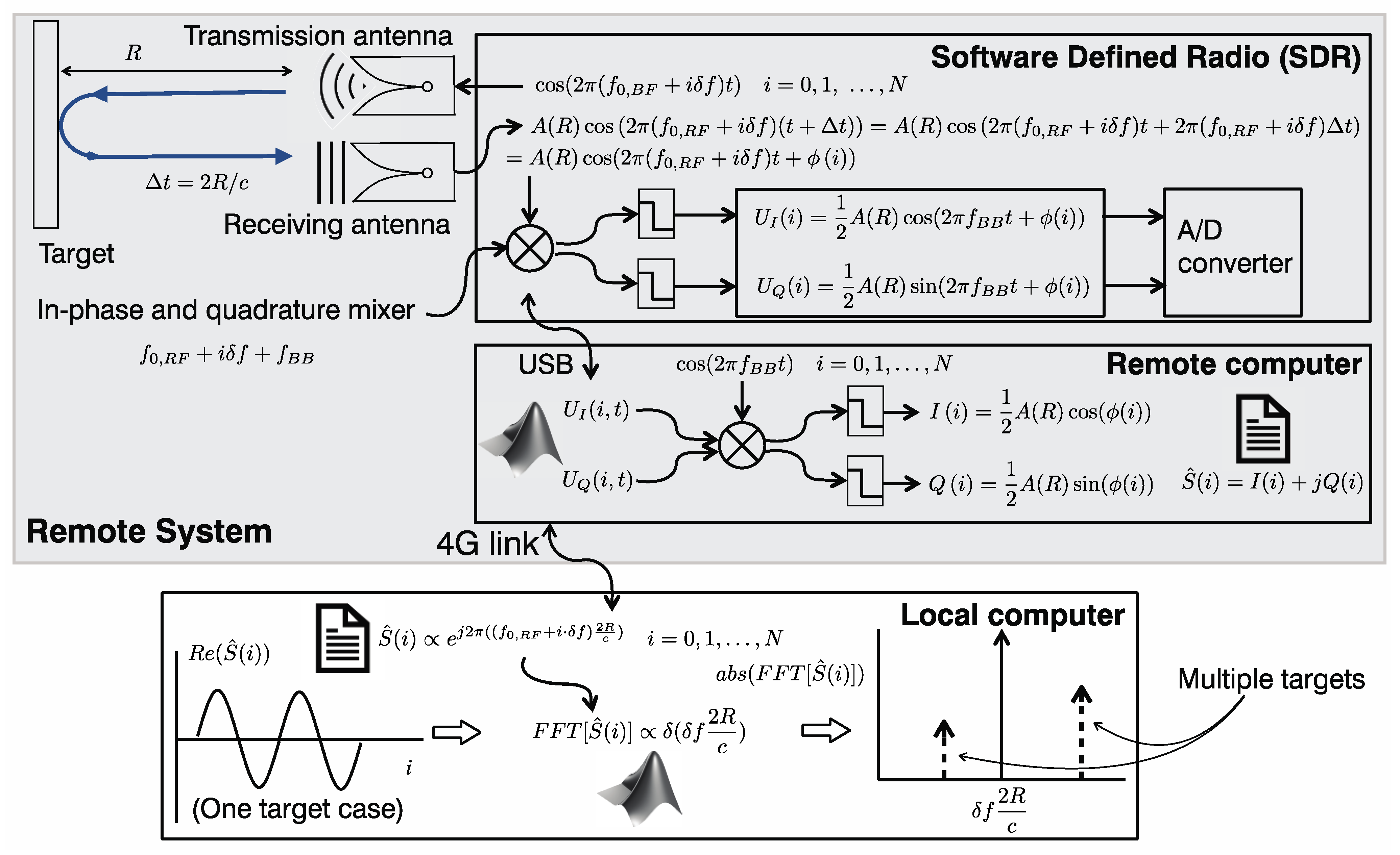
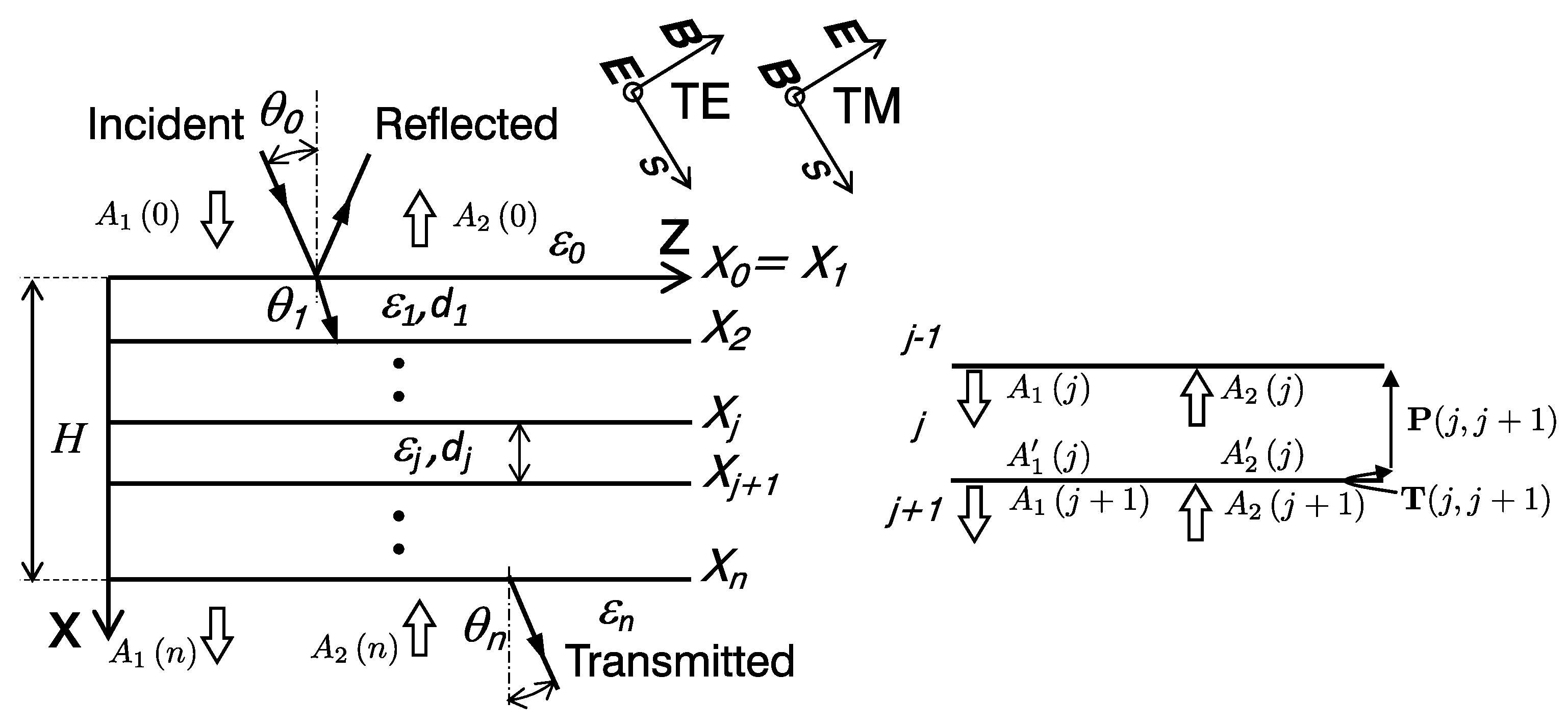
We conclude that the electromagnetic matrix model proposed, well-known in optics, was suitable for this application and reproduce the fundamental features of the reflectances measured by the SFCW, allowing an adequate interpretation of the reflection coefficients based, mainly, on the thickness, the density, and the LWC of layers of the snow cover.
The application of the proposed electromagnetic model of the snowpack has allowed us to derive a simple expression, under the assumption of dry snow, for SWE determination. The SWE can be obtained from the displacement of the position associated with snow–metal reflection, with respect to the position of metal reflection without snow cover. This measurement is independent of the snow height and indicates that the SWE of the snowpack is linearly related to that displacement. In other words, the increase of “time-of-flight” into snowpack, with respect to vacuum, is directly proportional to SWE. The application of the SWE model to the data captured by SFCW radar during winter 2019–2020 has shown that the agreement with the SWE CRN gauge from Automatic Hydrologic Information System of the Ebro River Basin (SAIH-CHE) was reasonable.
The height of the snowpack can be measured as the first air-snow reflection position with respect to the measurement of the position of the metal sheet in the soil. Therefore, the SFCW technique can be, also, used for measurement of the snow height without an auxiliary sensor.
The new snow depth measurement probe based on a 120 GHz FMCW radar sensor was operational even in freshly fallen snow situations with low density.
The hardware, software, and communications infrastructure are operational and reliable in a harsh environment, providing an operative platform for future experiments.
It was not possible to observe the internal structure of the snowpack. This possibility would require an improvement in the measurement system. Future work must continue with a precise estimation of the error by comparison with gravimetric measurements of SWE. Further improvements of the SFCW hardware and software are necessary to increase the signal-to-noise ratio, improve the ‘ghost’ peak detection algorithms, and increase the resolution to measure the snowpack stratigraphy. The main improvement in the hardware system will be the design and construction of new ultra-wide band antennas, with linear polarization and good directionality to minimize direct coupling between the transmitting and detecting antennas. The starting design will be a dual ridge horn antenna (DRHA). Improving the drainage properties of the metal plate, as outlined in
Section 5, will also be necessary.
The improvement of the system sensitivity could even allow for removal of the metal plate, using the reflectance of the natural soil as a reference with the advantages that this could have both from a totally non-perturbative analysis of the snowpack and the possibility of making a portable instrument without the need for infrastructure under the snow cover.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}