
Research on Detection Technology of Spoofing under the Mixed Narrowband and Spoofing Interference


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Mathematics Model
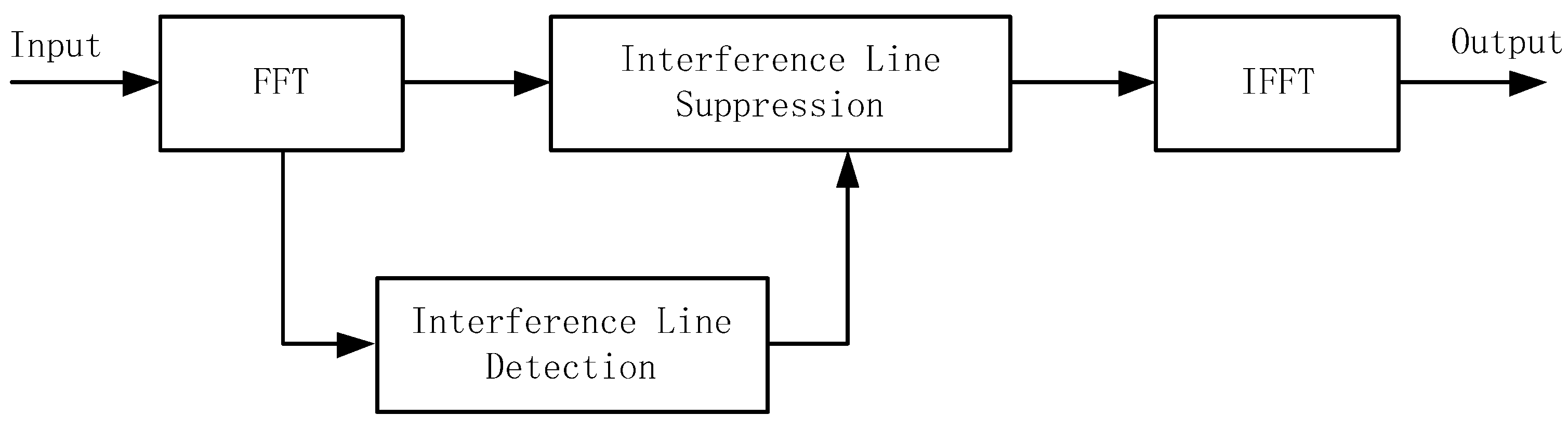
2.1. Narrowband Interference Suppression
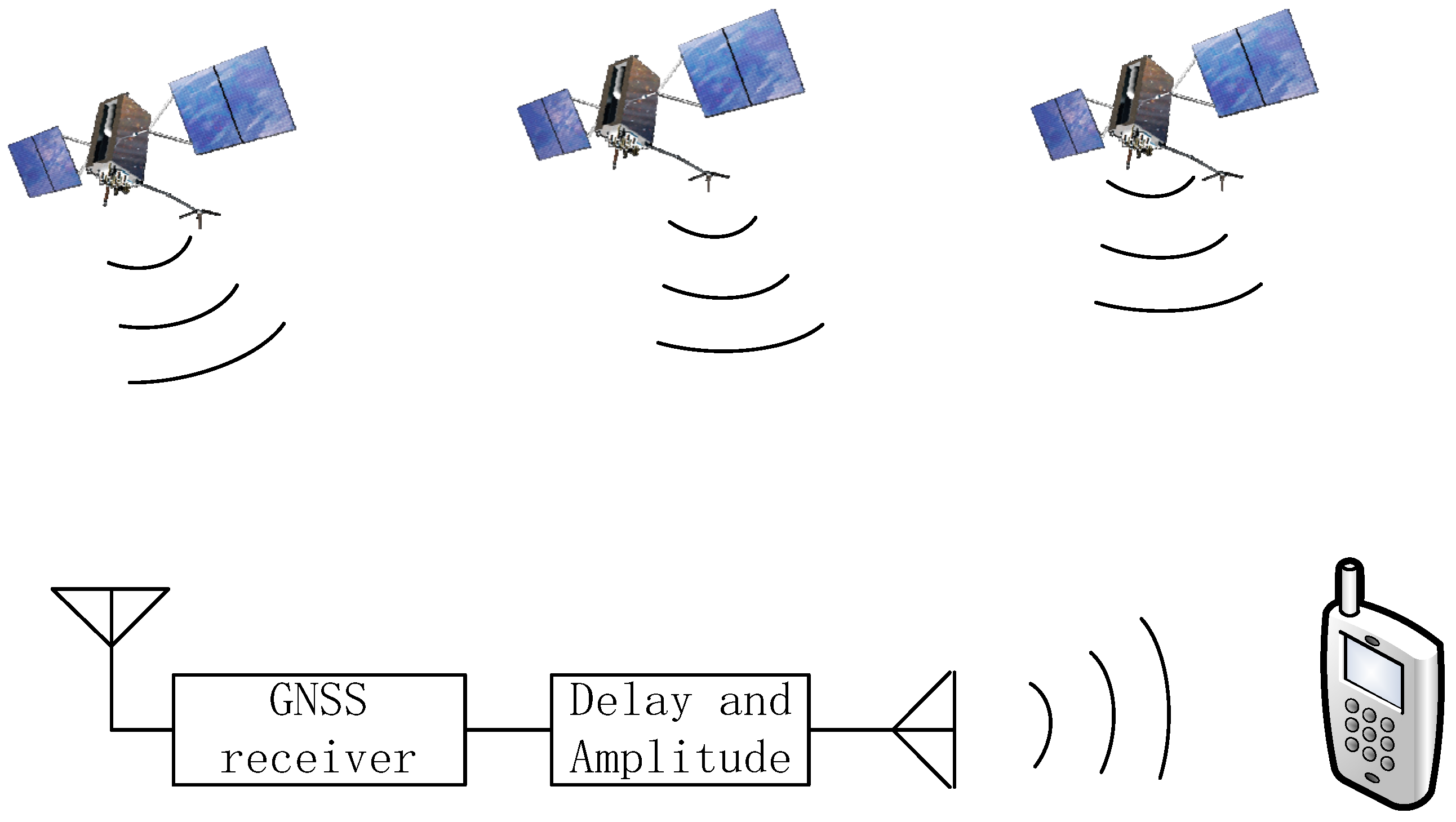
2.2. Spoofing Jamming Detection
- (1)
- Multiply the received signal with the locally generated in-phase and quadrature signals to obtain the baseband complex signal and perform the FFT on the complex signal to obtain ,.
- (2)
- Perform a fast Fourier transform on the local pseudocode to obtain , then take the conjugate value of to obtain , where is the step of the search frequency and is the number of channels.
- (3)
- Multiply and the point-to-point to to obtain the output result .
- (4)
- Perform an IFFT to obtain with a time-domain value, then take the modulo to obtain ; at this time, there are a total of values of .
- (5)
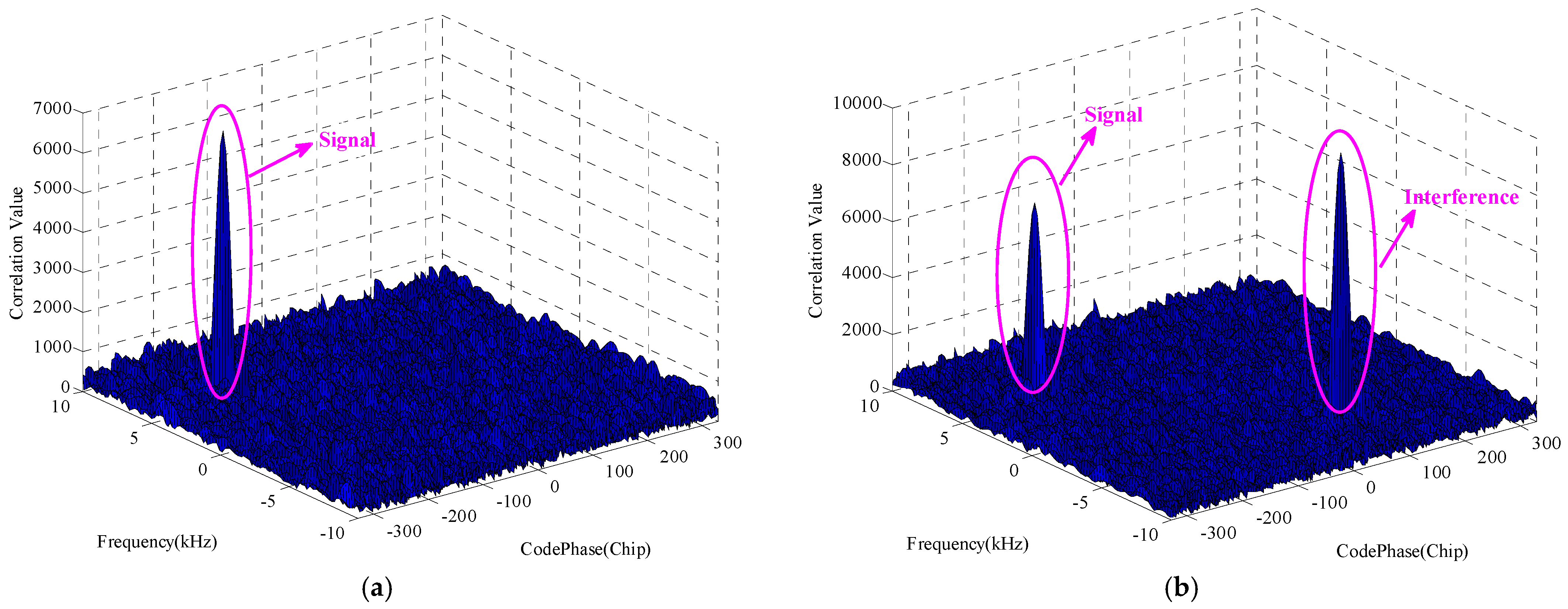
- Perform a two-dimensional search on the value of and compare it with a predetermined threshold. If there are two or more peaks higher than the threshold, it is considered that there is forwarding spoofing interference, and an alarm is issued to the receiver; if there is only one peak higher than the threshold, it is considered to be a real signal, and the tracking link is entered normally.
3. Analysis of the Influence of Interference
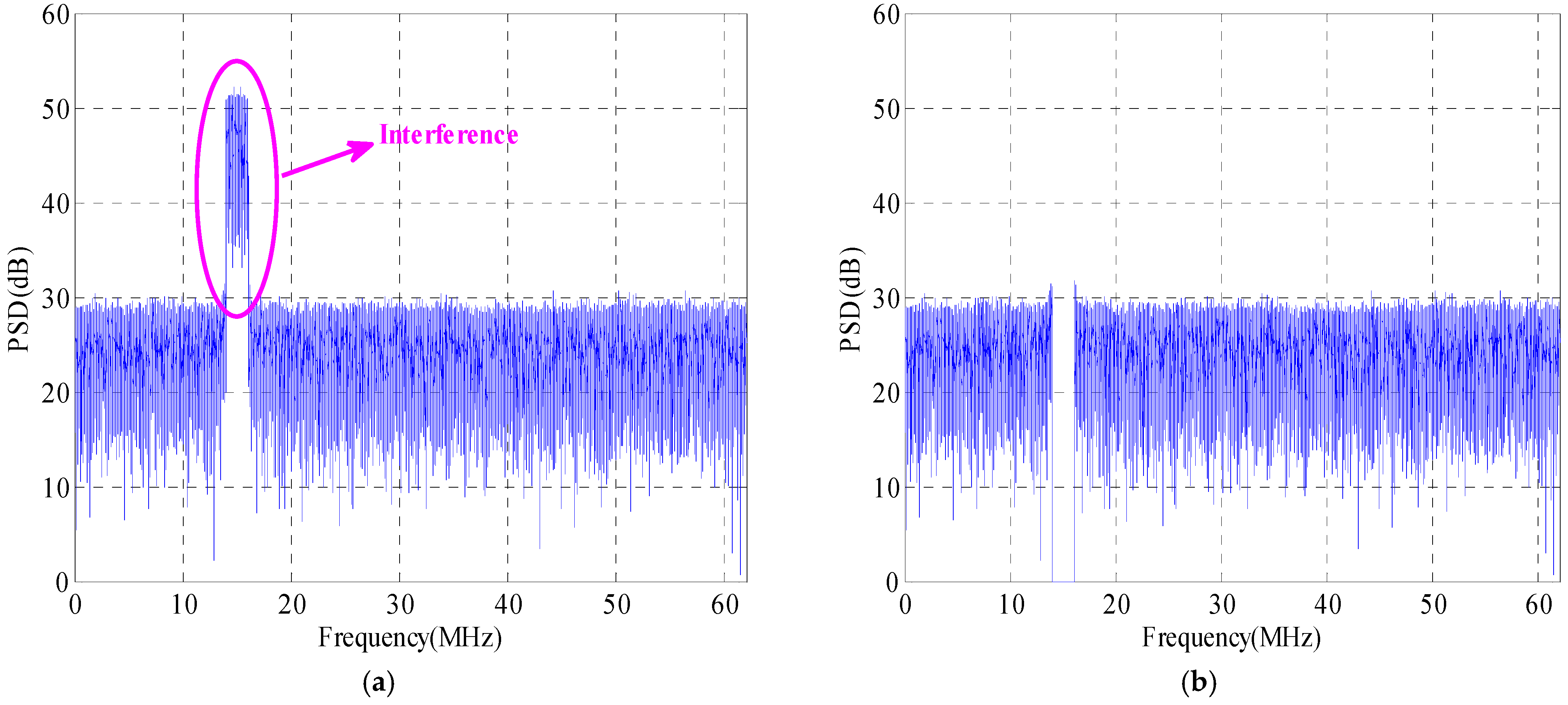
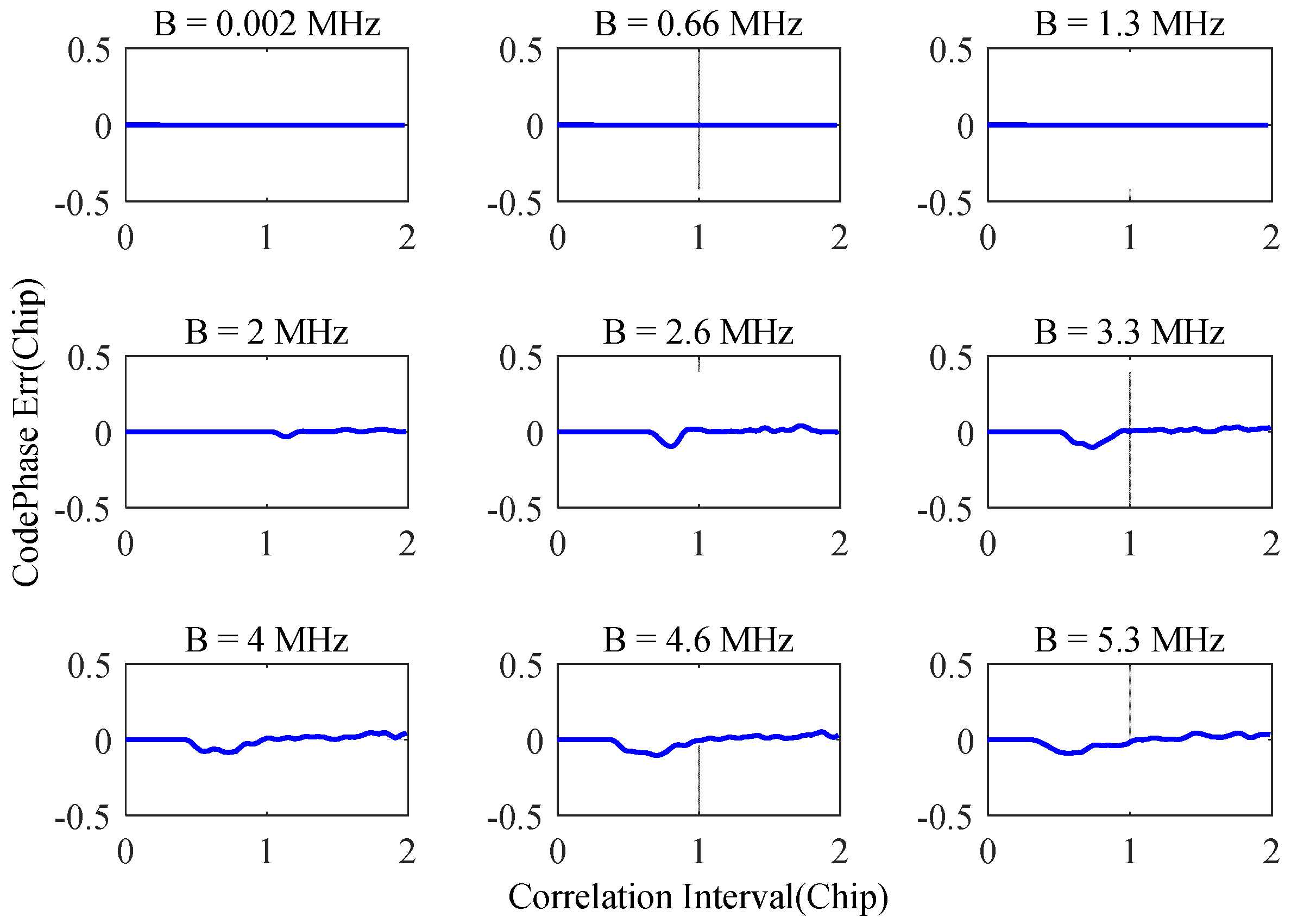
3.1. Analysis of the Influence of Narrowband Interference Suppression
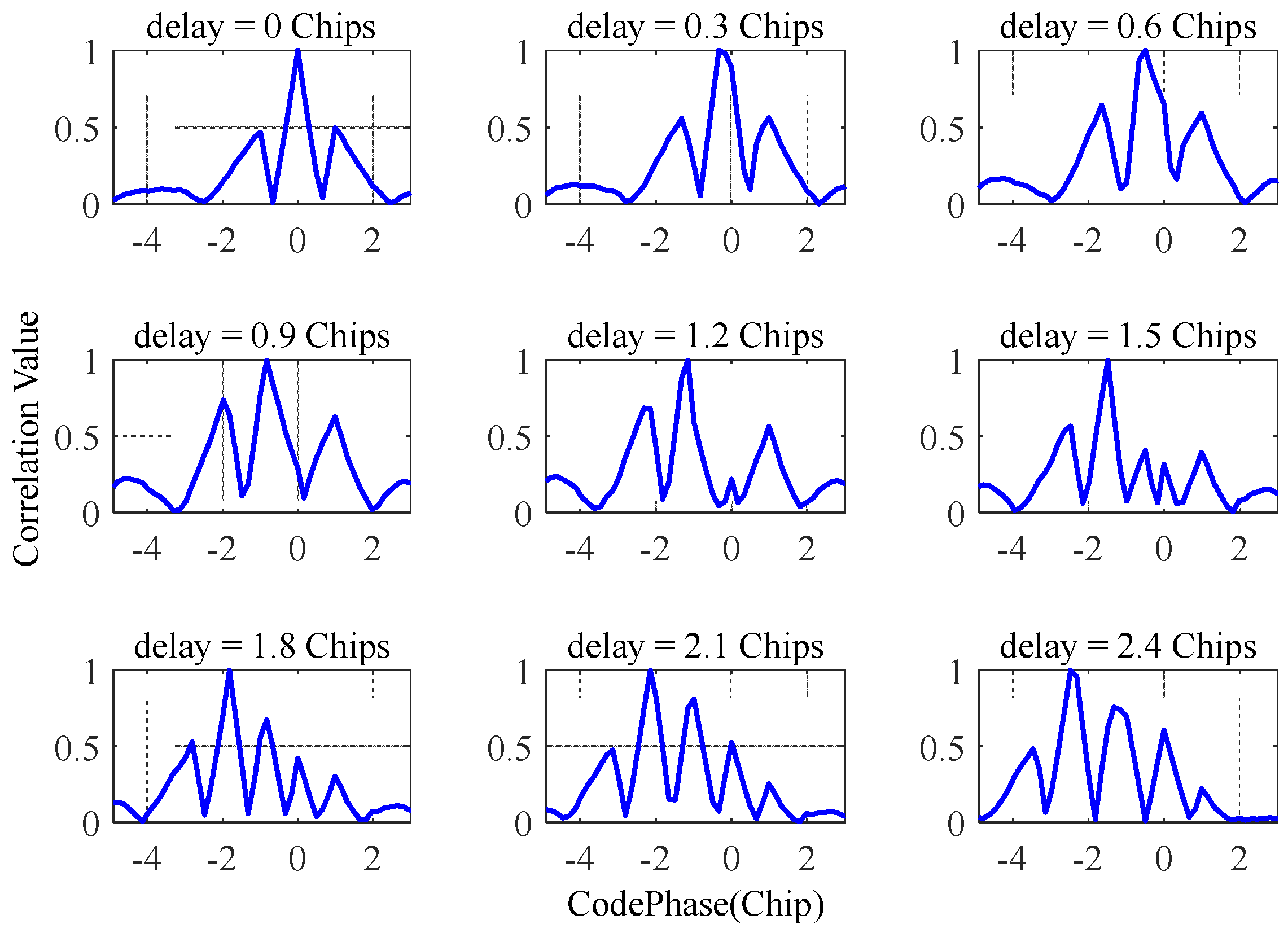
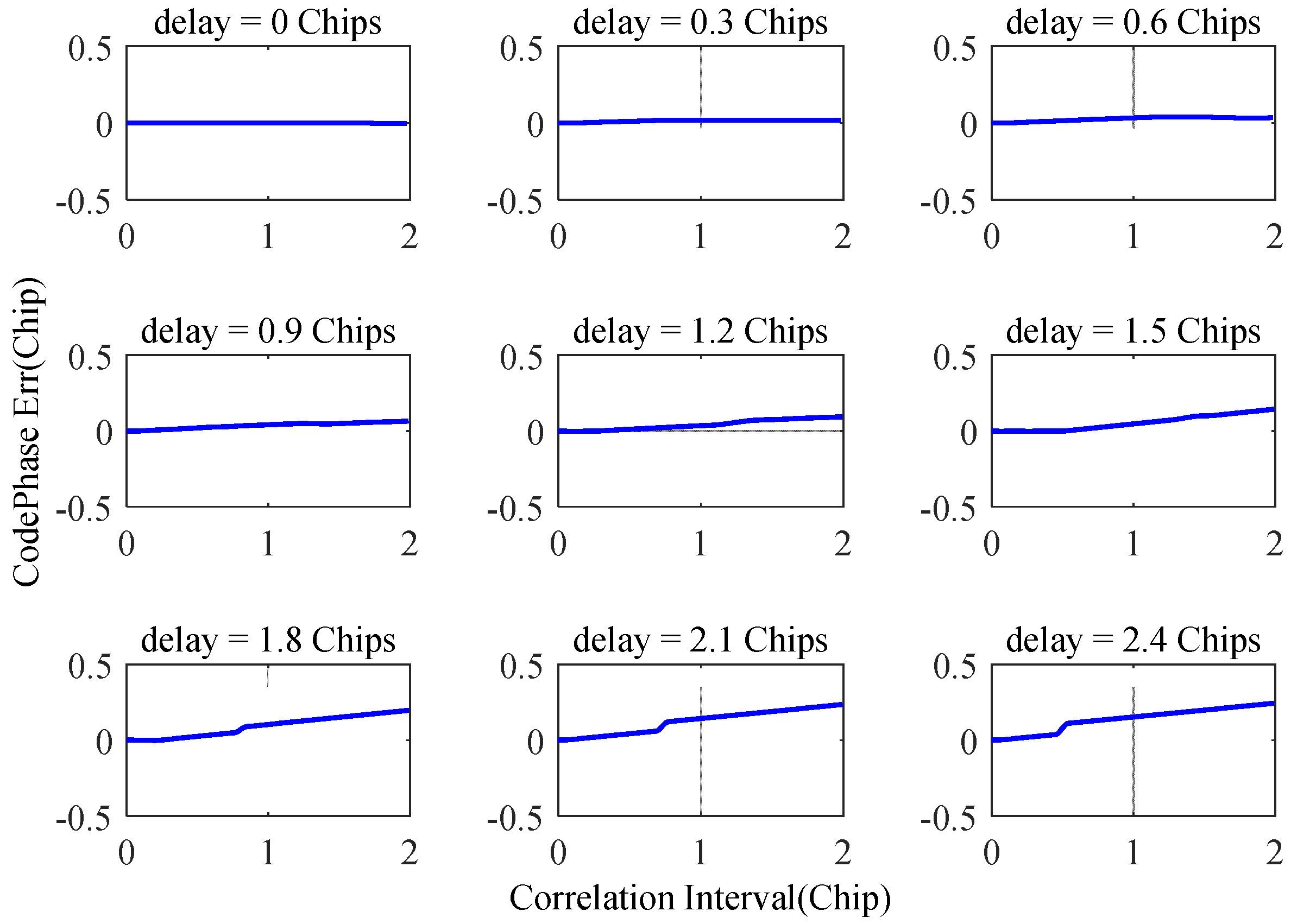
3.2. Analysis of the Influence of Spoofing Interference
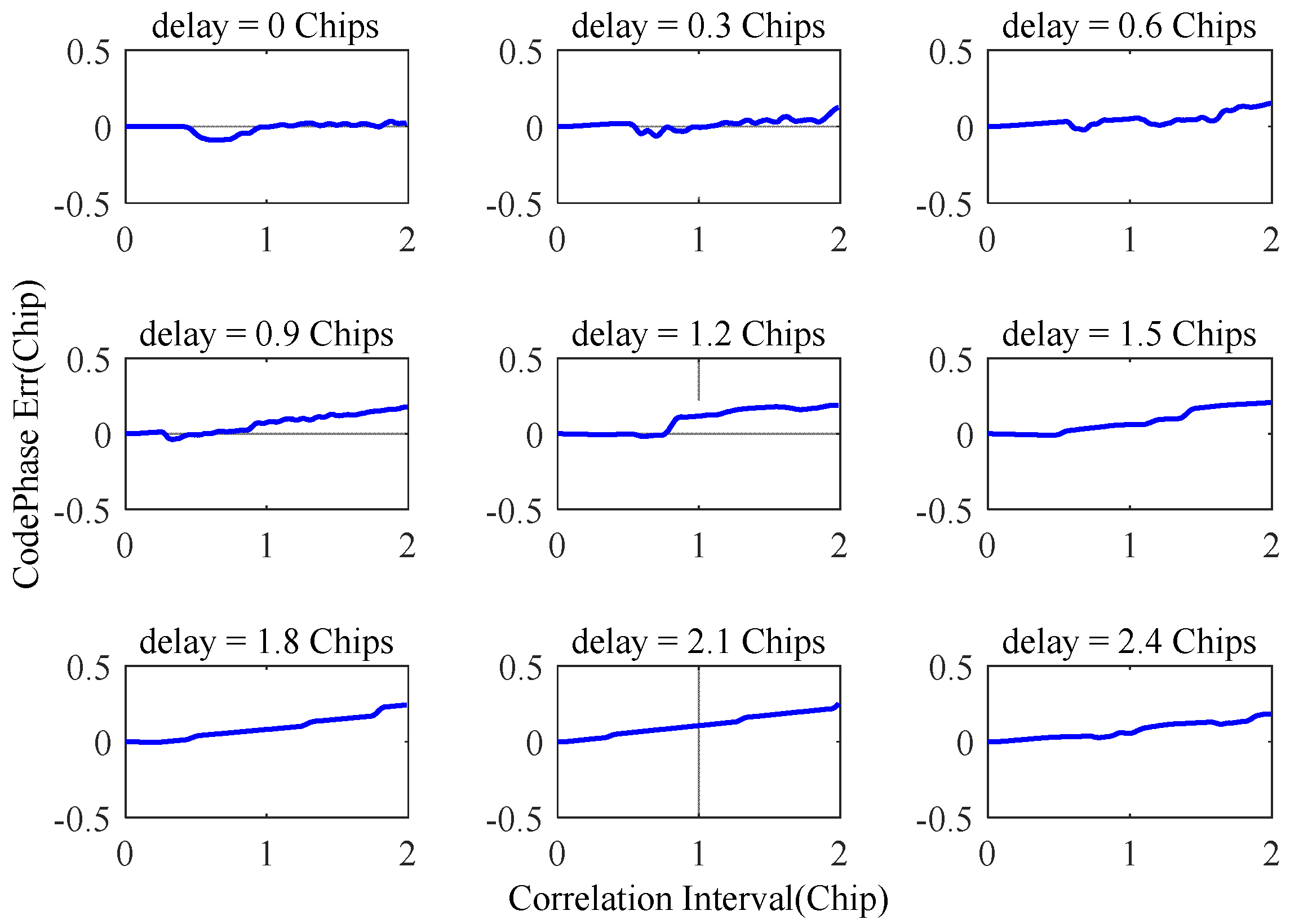
3.3. Analysis of the Influence of Mixed Interference
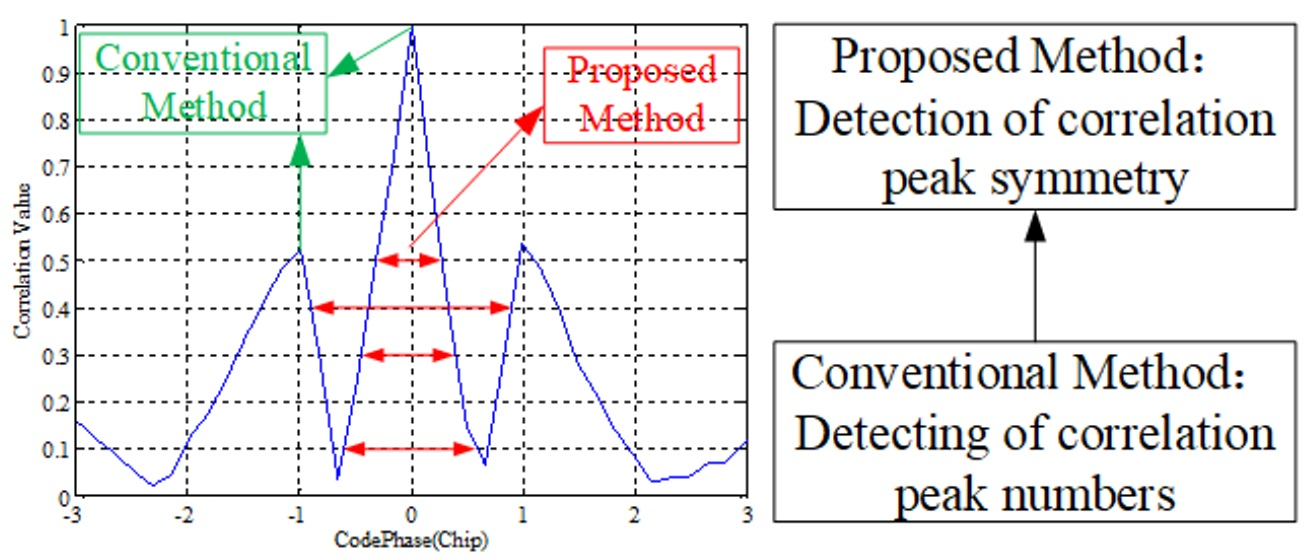
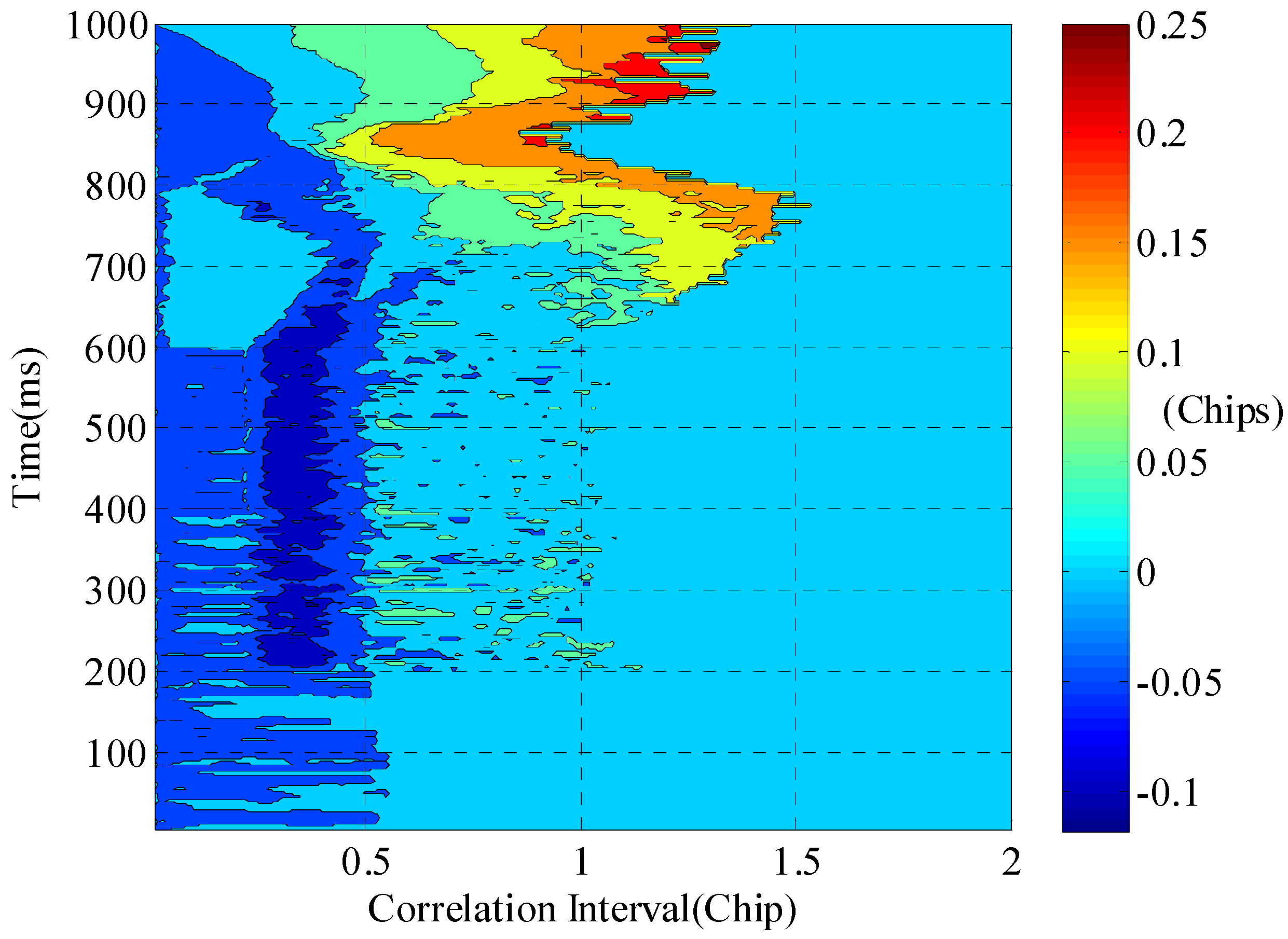
4. Detection Method Based on Correlation Peak Symmetry
5. Experimental Verification of the Software Receiver
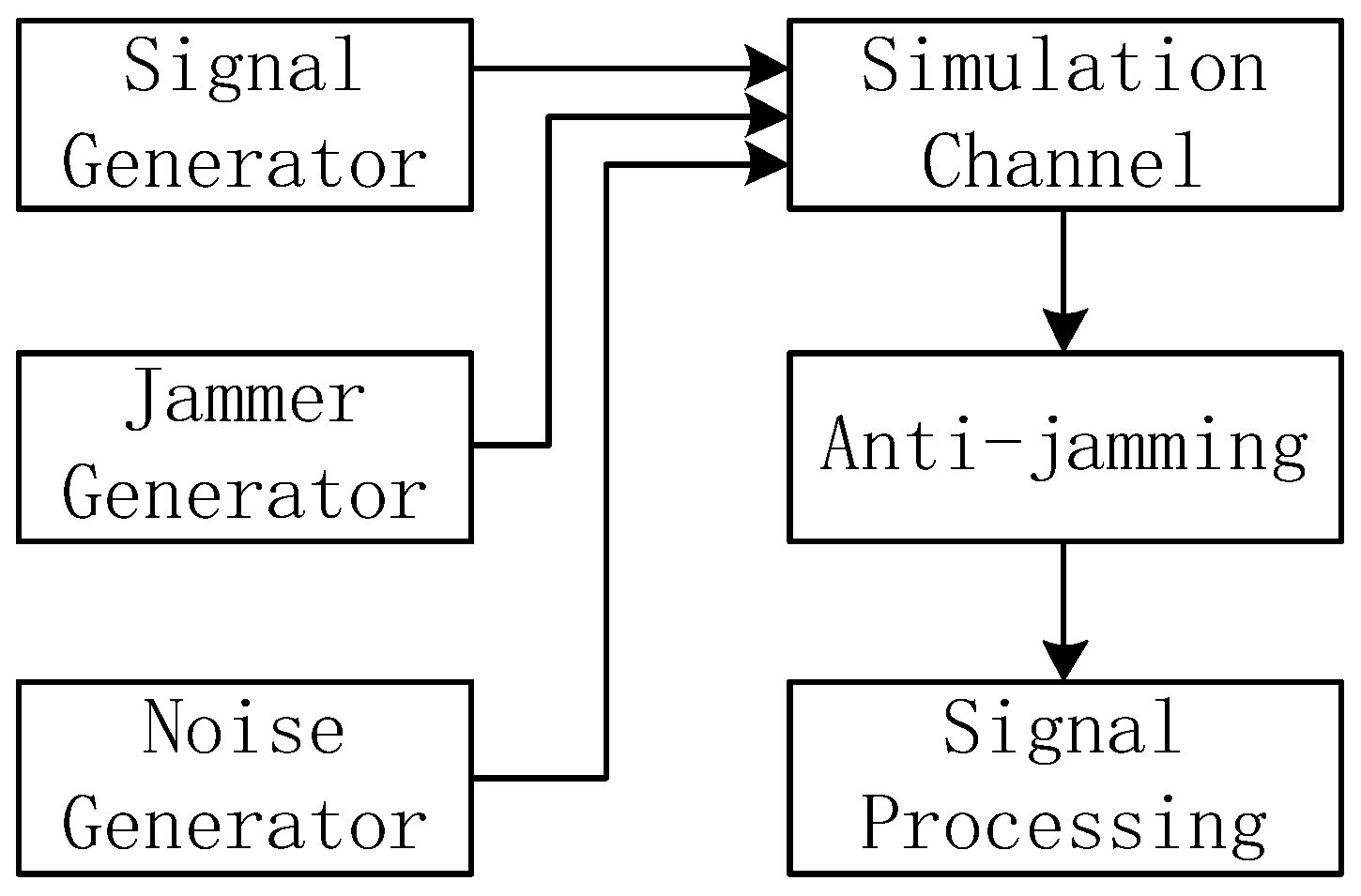
5.1. Experimental Platform
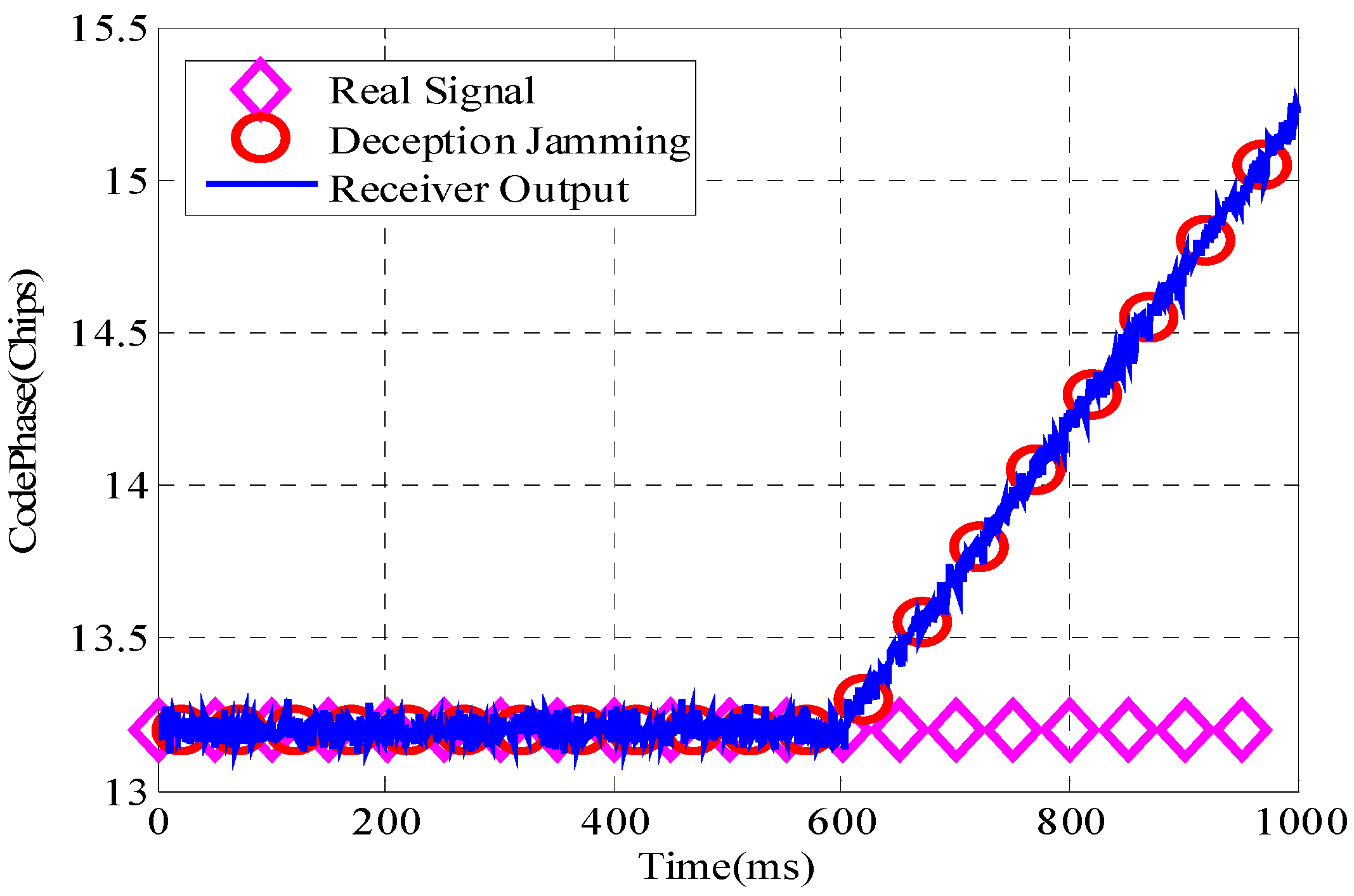
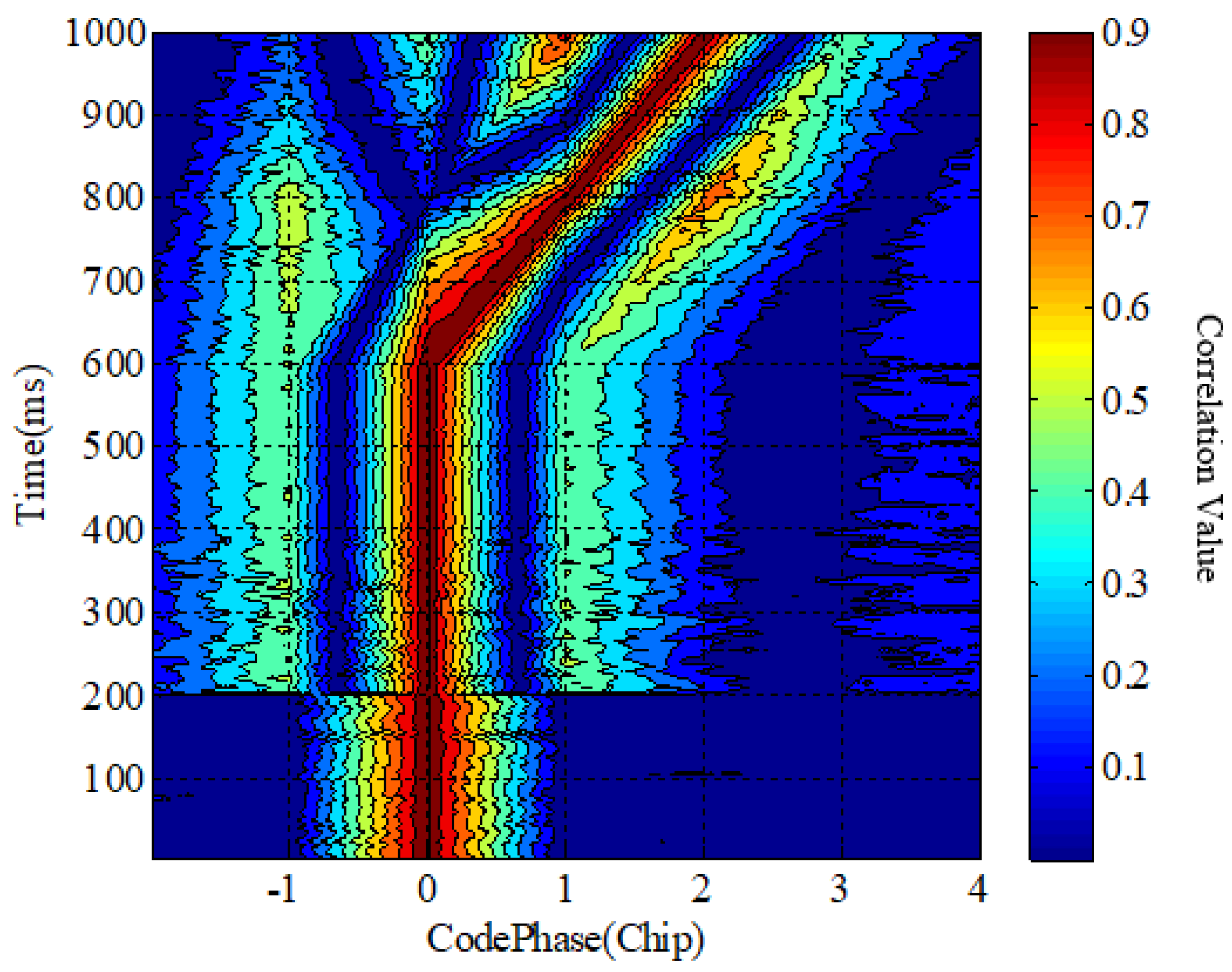
5.2. Simulation Experiment
6. Discussion
7. Conclusions
- (1)
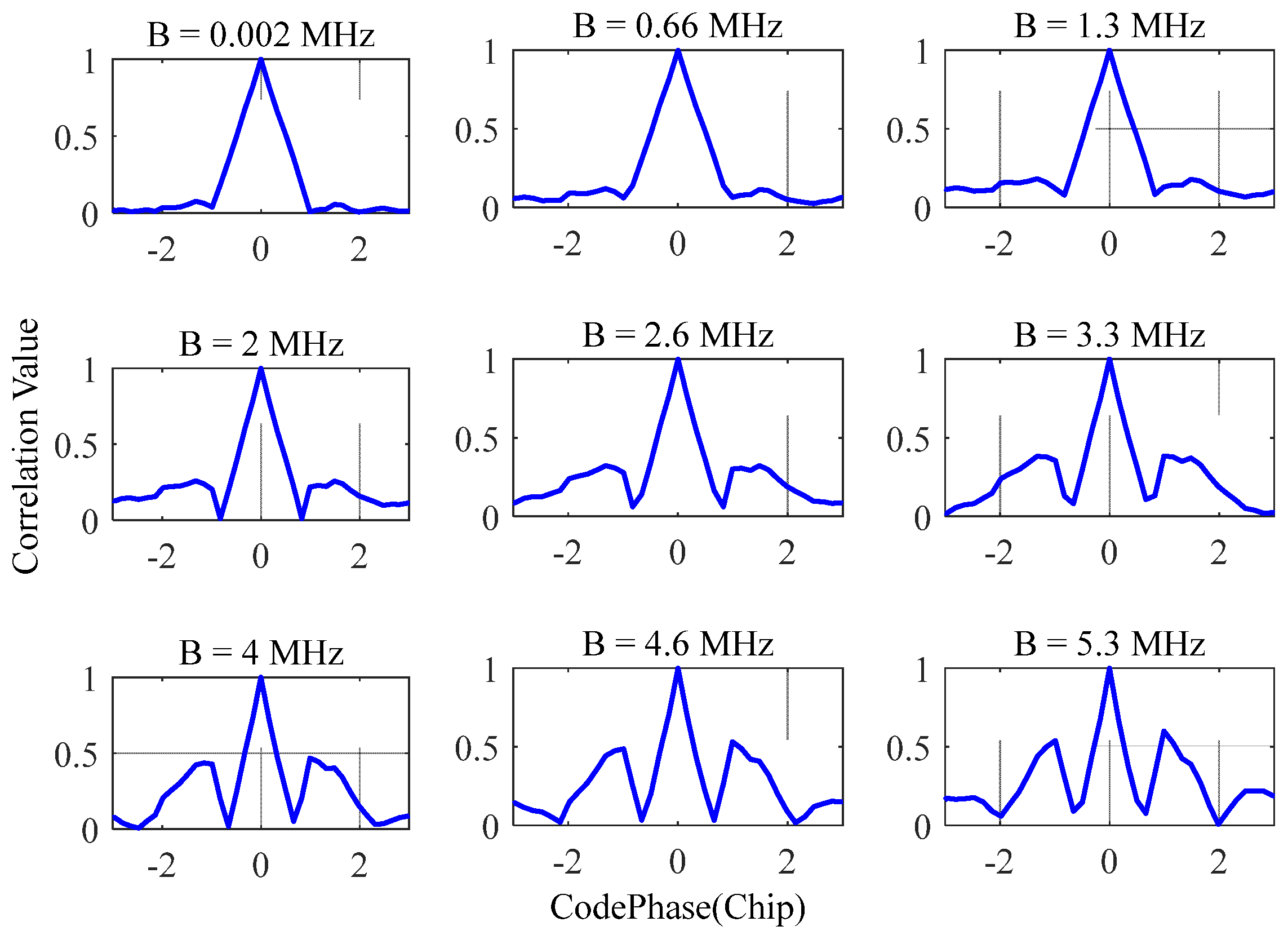
- The suppression of narrow-band interference will cause the rise of the sidelobes of the correlation peak. If the detection method of spoofing interference based on the number of correlation peaks is adopted, this will cause false alarms in the detection of spoofing interference.
- (2)
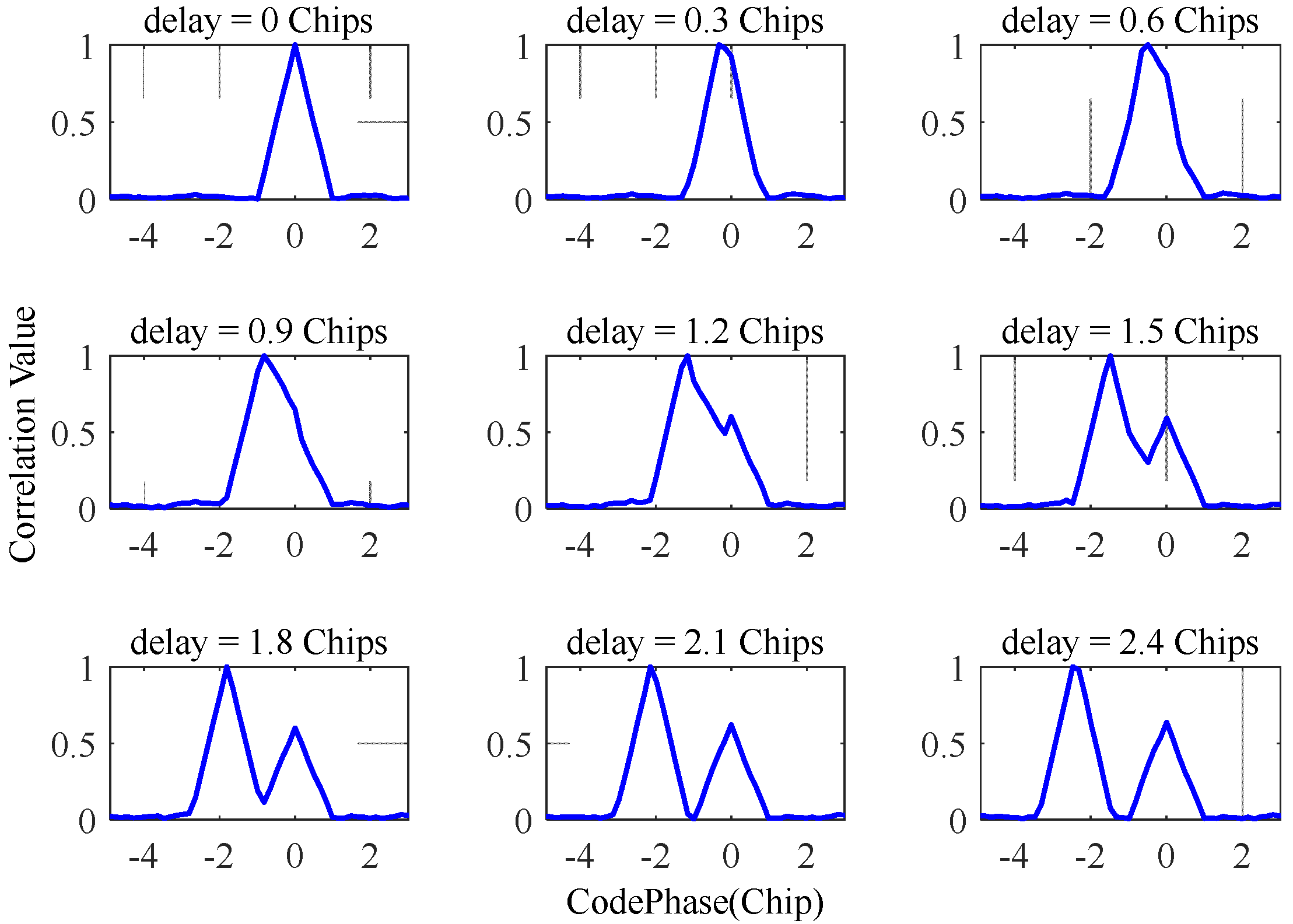
- When the delay between spoofing interference and the real signal is less than 1 chip, the displayed correlation function is still a correlation peak, and the spoofing interference detection method based on the number of correlation peaks will be invalid.
- (3)
- When narrowband interference and spoofing interference coexist, the number of correlation peaks will be complicated, and the detection of spoofing interference cannot be achieved solely by the number of correlation peaks.
- (4)
- Narrowband interference will not destroy the symmetry of the correlation peak, whereas spoofing interference will destroy the symmetry of the correlation peak. Using the symmetry of detecting deception interference can effectively realize the detection of deception interference.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xue, B.; Wang, H.; Yuan, Y. Performance of BeiDou-3 signal-in-space ranging errors: Accuracy and distribution. GPS Solut. 2021, 25, 23. [Google Scholar] [CrossRef]
- Alexandre, M.; Alvaro, S.; Jean-Paul, B.; Félix, P.; Sylvain, L. Analysis of GNSS Displacements in Europe and Their Comparison with Hydrological Loading Models. Remote Sens. 2021, 13, 4523. [Google Scholar]
- Lu, Z.; Chen, F.; Xie, Y.; Sun, Y.; Cai, H. High Precision Pseudo-Range Measurement in GNSS Anti-jamming Antenna Array Processing. Electronics 2020, 9, 412. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Li, B.; Nie, L. Initial assessment of BeiDou-3 global navigation satellite system: Signal quality, RTK and PPP. GPS Solut. 2019, 23, 111. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, Y.; Tang, C.; Chen, J.; Zhao, L.; Zhou, S.; Hu, X.; Tian, Q.; Yang, Y. Pseudorange Bias Analysis and Preliminary Service Performance Evaluation of BDSBAS. Remote Sens. 2021, 13, 4815. [Google Scholar] [CrossRef]
- Sara, J.H.; Nagaraj, C.S.; Dennis, M.A. Fitlering and quantization effects on GNSS successive interference cancellation. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 924–936. [Google Scholar]
- Zhang, P.; Tu, R.; Zhang, R.; Gao, Y.; Cai, H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sens. 2018, 10, 324. [Google Scholar] [CrossRef] [Green Version]
- Ladina, S.; Michael, M.; Christoph, M. Impact of GPS processing on the estimation of snow water equivalent using refracted GPS signals. IEEE Trans. Geosci. Remote Sens. 2020, 58, 123–135. [Google Scholar]
- Song, J.; Lu, Z.; Xiao, Z.; Li, B.; Sun, G. Optimal Order of Time-Domain Adaptive Filter for Anti-jamming Navigation Receiver. Remote Sens. 2022, 14, 48. [Google Scholar] [CrossRef]
- Huang, L.; Lu, Z.; Ren, C.; Xiao, Z.; Song, J.; Li, B. Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sens. 2022, 14, 350. [Google Scholar] [CrossRef]
- Bertold, V.D.B.; Sofie, P. Keeping UAVs under control during GPS jamming. IEEE Syst. J. 2019, 13, 2010–2021. [Google Scholar]
- Lu, Z.; Chen, H.; Chen, F.; Nie, J.; Ou, G. Blind Adaptive Channel Mismatch Equalization Method for GNSS Antenna Arrays. IET Radar Sonar Navig. 2018, 12, 383–389. [Google Scholar] [CrossRef]
- Humphreys, T.E. Detection Strategy for Cryptographic GNSS Anti-Spoofing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1073. [Google Scholar] [CrossRef]
- Adnan, K.; Jian, D.; Rong, S. A metamaterial-based compact planar monopole antenna for Wi-Fi and UWB applications. Sensors 2019, 19, 5426. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Zhang, Y.; Yang, Y.; Liang, C.; Liu, R. Spoofing and Anti-Spoofing Technologies of Global Navigation Satellite System: A Survey. IEEE Access 2020, 8, 165444. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, Z.; Trinkle, M.; Dimitrovski, A.D.; Song, J.B.; Li, H. A Cross-Layer Defense Mechanism Against GPS Spoofing Attacks on PMUs in Smart Grids. IEEE Trans. Smart Grid 2014, 6, 2659–2668. [Google Scholar] [CrossRef]
- Siamak, S.; Dehghani, M.; Mohammadi, M. Dynamic GPS Spoofing Attack Detection, Localization, and Measurement Correction Exploiting PMU and SCADA. IEEE Syst. J. 2020, 15, 2531–2540. [Google Scholar] [CrossRef]
- Silva, S.D.; Kim, J.; Cotilla-Sanchez, E.; Hagan, T. On PMU Data Integrity Under GPS Spoofing Attacks: A Sparse Error Correction Framework. IEEE Trans. Power Syst. 2021, 36, 5317–5332. [Google Scholar] [CrossRef]
- Harvey, W.; Rainwater, C.; Cothren, J. Direct Aerial Visual Geolocalization Using Deep Neural Networks. Remote Sens. 2021, 13, 4017. [Google Scholar] [CrossRef]
- Schmidt, E.; Gatsis, N.; Akopian, D. A GPS Spoofing Detection and Classification Correlator-Based Technique Using the LASSO. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4224–4237. [Google Scholar] [CrossRef]
- Wei, X.; Aman, M.N.; Sikdar, B. Exploiting Correlation Among GPS Signals to Detect GPS Spoofing in Power Grids. IEEE Trans. Ind. Appl. 2021, 58, 697–708. [Google Scholar] [CrossRef]
- Lu, Z.; Nie, J.; Chen, F.; Ou, G. Impact on Anti-jamming Performance of Channel Mismatch in GNSS Antenna Arrays Receivers. Int. J. Antennas Propag. 2016, 2016, 1909708. [Google Scholar] [CrossRef]
- Mohamed, T.; Michael, J.; Haidy, E.; Aboelmagd, N. GPS Swept Anti-Jamming Technique Based on Fast Orthogonal Search (FOS). Remote Sens. 2021, 21, 3706. [Google Scholar] [CrossRef]
- Jian, D.; Chang, D.; Jin, M. A Low-Profile Wideband Linear-to-Circular Polarization Conversion Slot Antenna Using metasurface. Materials 2020, 13, 1164. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Nie, J.; Wan, Y.; Ou, G. Optimal reference element for interference suppression in GNSS antenna arrays under channel mismatch. IET Radar Sonar Navig. 2017, 11, 1161–1169. [Google Scholar] [CrossRef]
- Wang, H.M.; Huang, K.W.; Tsiftsis, T.A. Multiple Antennas Secure Transmission Under Pilot Spoofing and Jamming Attack. IEEE J. Sel. Areas Commun. 2018, 36, 860–876. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Nie, J.; Chen, F.; Chen, H.; Ou, G. Adaptive Time Taps of STAP Under Channel Mismatch for GNSS Antenna Arrays. IEEE Trans. Instrum. Meas. 2017, 66, 2813–2824. [Google Scholar] [CrossRef]
- Xiao, L.; Li, X.; Wang, G. GNSS Spoofing Detection Using Pseudo-range Double Differences between Two Receivers. In Proceedings of the IEEE 7th International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 19–20 October 2019; pp. 498–502. [Google Scholar] [CrossRef]
- Xiao, L.; Li, X.; Liao, Z. GNSS Spoofing DetectionWith Using Planar Array. In Proceedings of the 7th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 18–20 December 2020; pp. 664–668. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, H. The Research on GPS Frequency Domain Anti-Jamming Algorithms. In Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–3. [Google Scholar] [CrossRef]
- Fan, G.T.; Huang, Y.B.; Su, Y.X.; Li, J.Y.; Sun, G.F. A reduced bias delay lock loop for adaptive filters. Adv. Space Res. 2017, 59, 230. [Google Scholar] [CrossRef]
- Zhou, Z.; Wei, Y. The Influence of Automatic Gain Control on Narrowband Frequency Domain GPS Anti-Jamming Receiver. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 497–501. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, H.; Xiong, G.; Zhang, S. AM-FM interference suppression for GPS receivers based on time-frequency analysis and synthesis. In Proceedings of the 2005 IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Beijing, China, 8–12 August 2005; pp. 1378–1381. [Google Scholar] [CrossRef]
- Lv, W.; Shen, C.; Gui, F.; Tian, Z.; Jiang, D. Real-Time Spectrum Analyzer Based on All Phase FFT Spectrum Analysis. In Proceedings of the 2013 Fourth International Conference on Digital Manufacturing & Automation, Shinan, China, 29–30 June 2013; pp. 966–969. [Google Scholar]
- Rao, K.D.; Swamy, M.N.S. New approach for suppression of FM jamming in GPS receivers. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1464–1474. [Google Scholar] [CrossRef]
- Bethi, P.; Pathipati, S. Stealthy GPS Spoofing: Spoofer Systems, Spoofing Techniques and Strategies. In Proceedings of the 2020 IEEE 17th India Council International Conference (INDICON), New Delhi, India, 10–13 December 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Kim, T.H.; Sin, C.S.; Lee, S.; Kim, J.H. Analysis of effect of anti-spoofing signal for mitigating to spoofing in GPS L1 signal. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 523–526. [Google Scholar] [CrossRef]
- Pardhasaradhi, B.; Srihari, P.; Aparna, P. Spoofer-to-Target Association in Multi-Spoofer Multi-Target Scenario for Stealthy GPS Spoofing. IEEE Access 2021, 9, 108675–108688. [Google Scholar] [CrossRef]
- Lu, Z.; Song, J.; Huang, L.; Ren, C.; Xiao, Z.; Li, B. Distortionless 1/2 Overlap Windowing in Frequency Domain Anti-Jamming of Satellite Navigation Receivers. Remote Sens. 2022, 14, 1801. [Google Scholar] [CrossRef]
- Huo, S.; Nie, J.; Tang, X.; Wang, F. Minimum Energy Block Technique Against Pulsed and Narrowband Mixed Interferers for Single Antenna GNSS Receivers. IEEE Commun. Lett. 2015, 19, 1933–1936. [Google Scholar] [CrossRef]
- Xu, W.; Xing, W.; Fang, C.; Huang, P.; Tan, W.; Gao, Z. RFI Suppression for SAR Systems Based on Removed Spectrum Iterative Adaptive Approach. Remote Sens. 2020, 12, 3520. [Google Scholar] [CrossRef]
- Liu, Z.; Pang, J.; Liu, Y.; Wang, F. Double Strobe Technique for Unambiguous Tracking of TMBOC Modulated Signal in GPS. IEEE Signal Process. Lett. 2015, 22, 2204–2208. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Lu, Z.; Ren, C.; Liu, Z.; Xiao, Z.; Song, J.; Li, B. Research on Detection Technology of Spoofing under the Mixed Narrowband and Spoofing Interference. Remote Sens. 2022, 14, 2506. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14102506
Huang L, Lu Z, Ren C, Liu Z, Xiao Z, Song J, Li B. Research on Detection Technology of Spoofing under the Mixed Narrowband and Spoofing Interference. Remote Sensing. 2022; 14(10):2506. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14102506
Chicago/Turabian StyleHuang, Long, Zukun Lu, Chao Ren, Zhe Liu, Zhibin Xiao, Jie Song, and Baiyu Li. 2022. "Research on Detection Technology of Spoofing under the Mixed Narrowband and Spoofing Interference" Remote Sensing 14, no. 10: 2506. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14102506