
GNSS-R Soil Moisture Retrieval for Flat Vegetated Surfaces Using a Physics-Based Bistatic Scattering Model and Hybrid Global/Local Optimization

 , , , and
, , , and
Abstract
:
1. Introduction
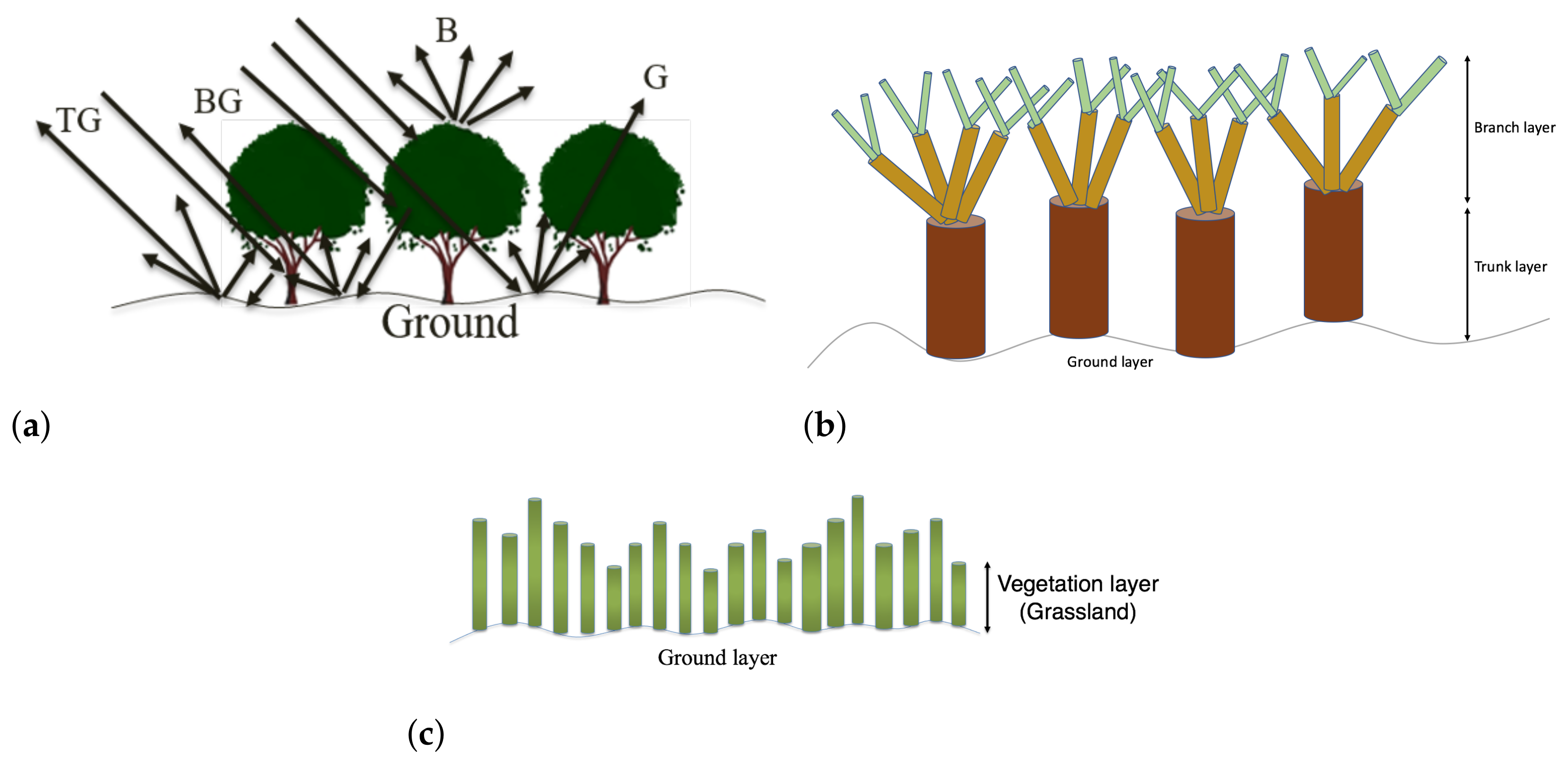
2. Bistatic Scattering Forward Model
2.1. Direct Ground Bistatic Scattering (G)
2.2. Vegetation Volume Bistatic Scattering (B)
2.3. Branch-Ground (BG) and Trunk-Ground (TG) Double-Bounce Bistatic Scattering
2.4. Total Bistatic Scattering Stokes Matrix
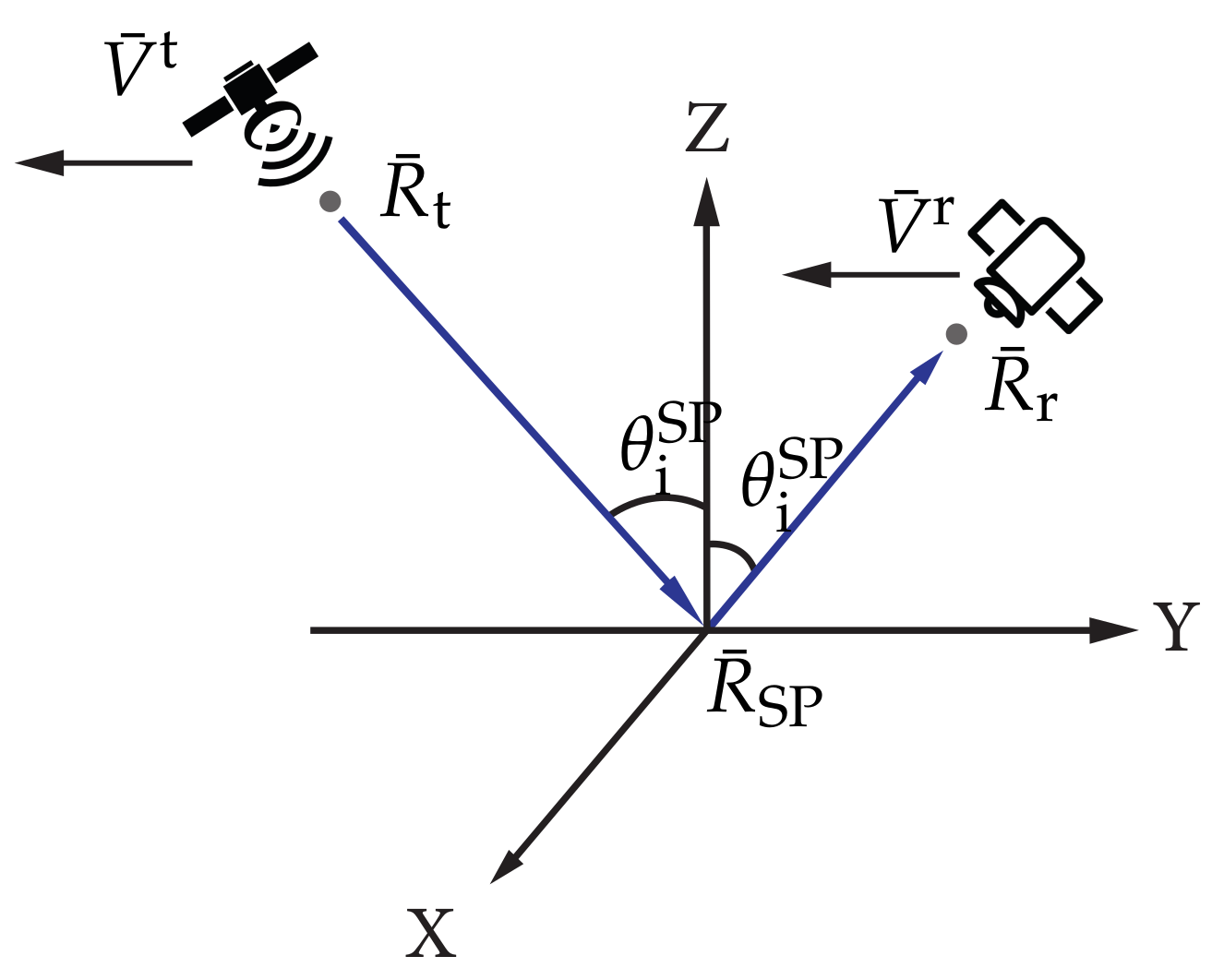
3. DDM Model
3.1. Estimating the Positions of Scattering Points of a DDM
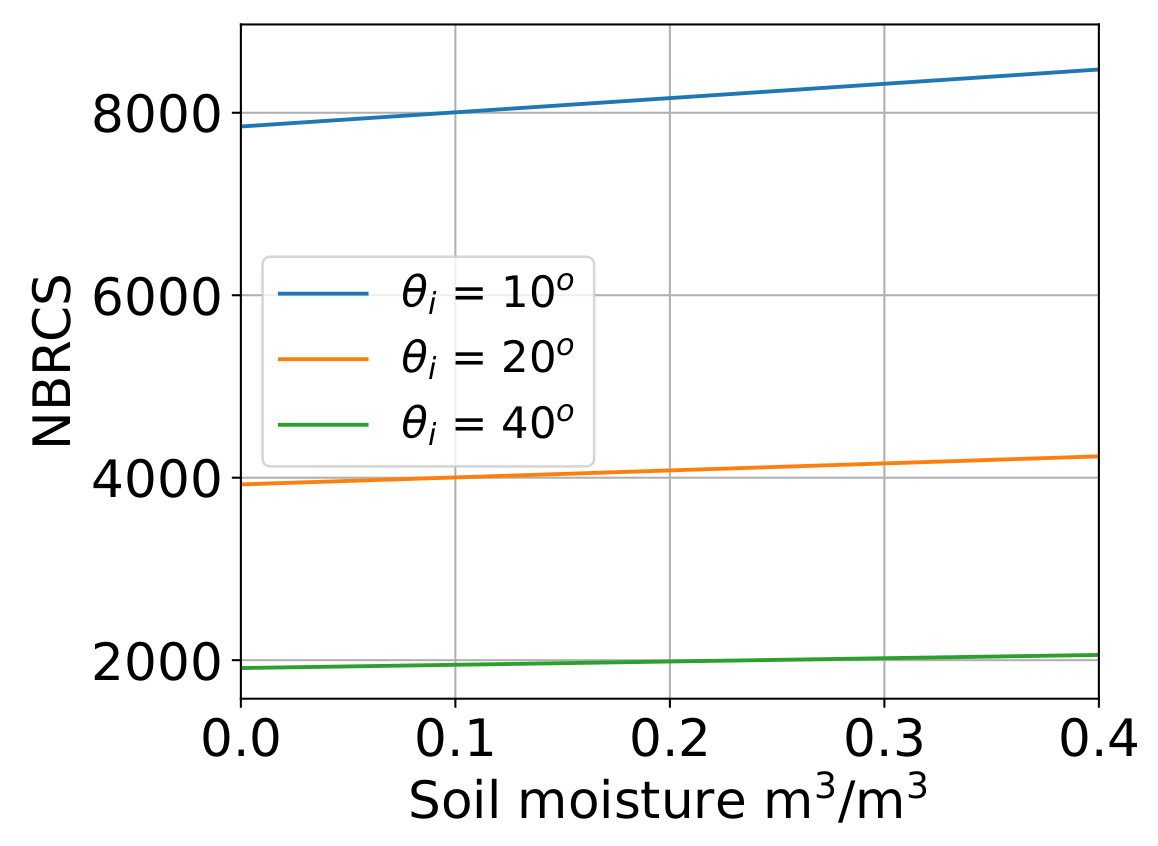
3.2. Calculating BRCS DDM
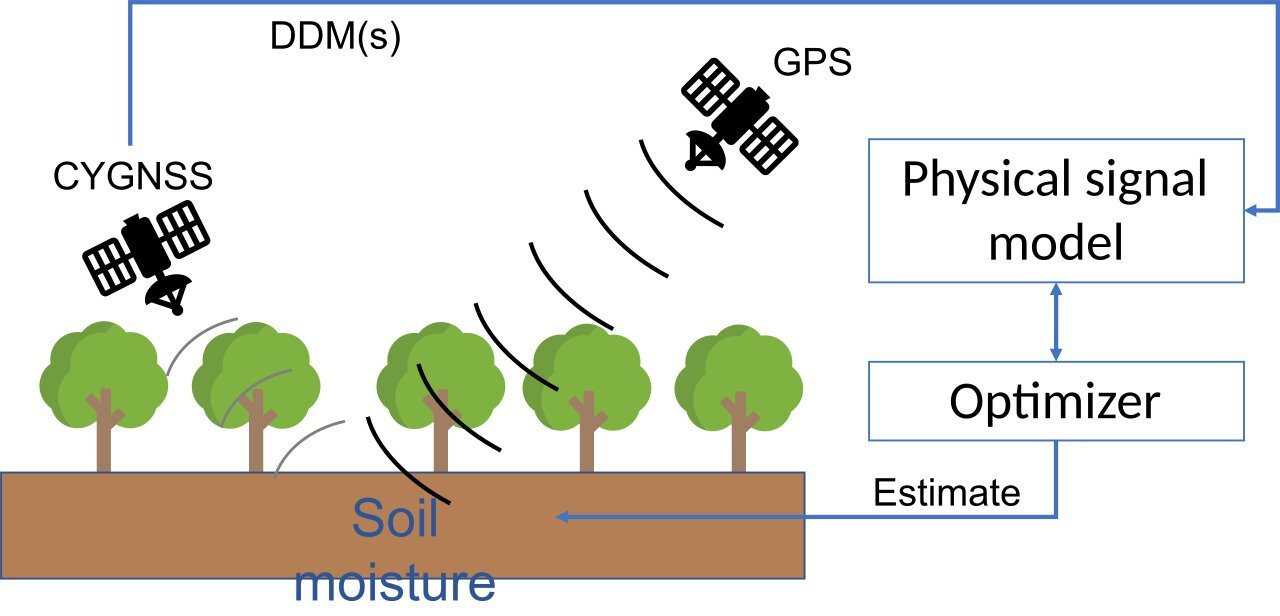
4. Soil Moisture Retrieval Method
5. Simulation Setup and Validation Site
5.1. Simulation Setup
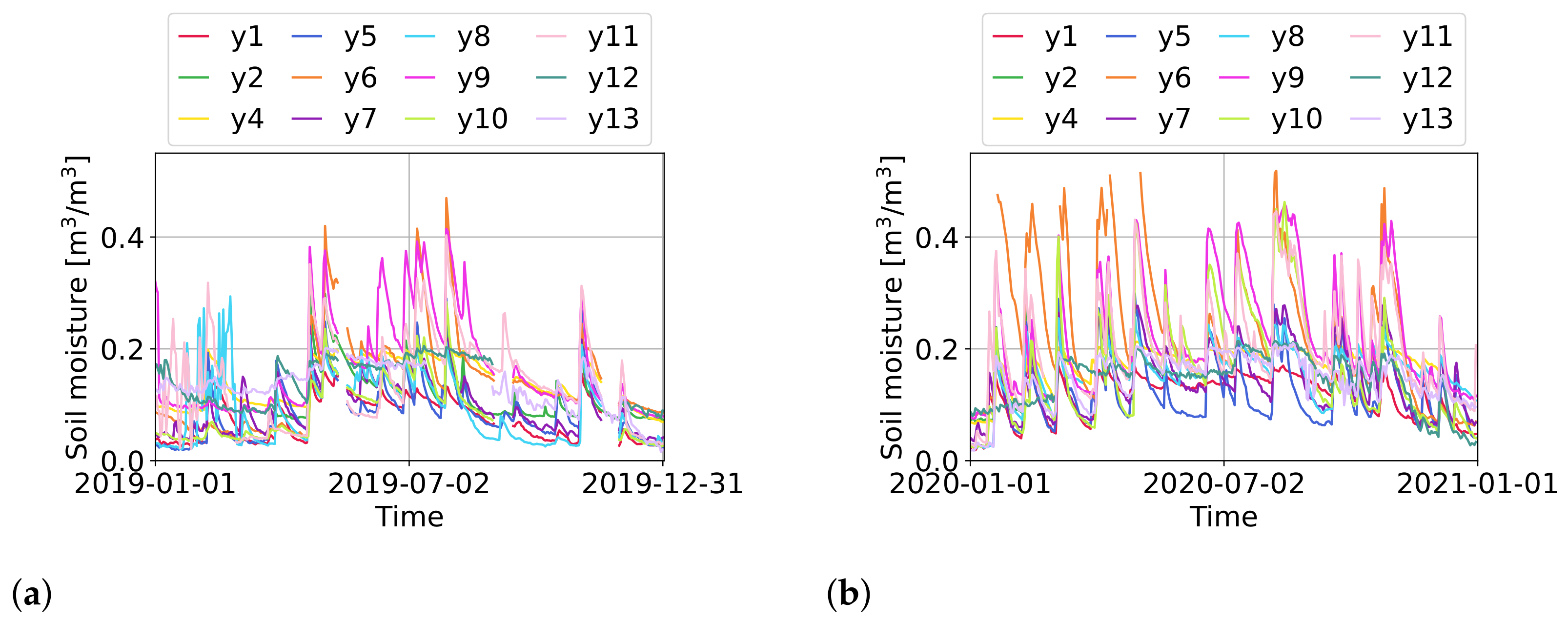
5.2. Validation Site
6. Results
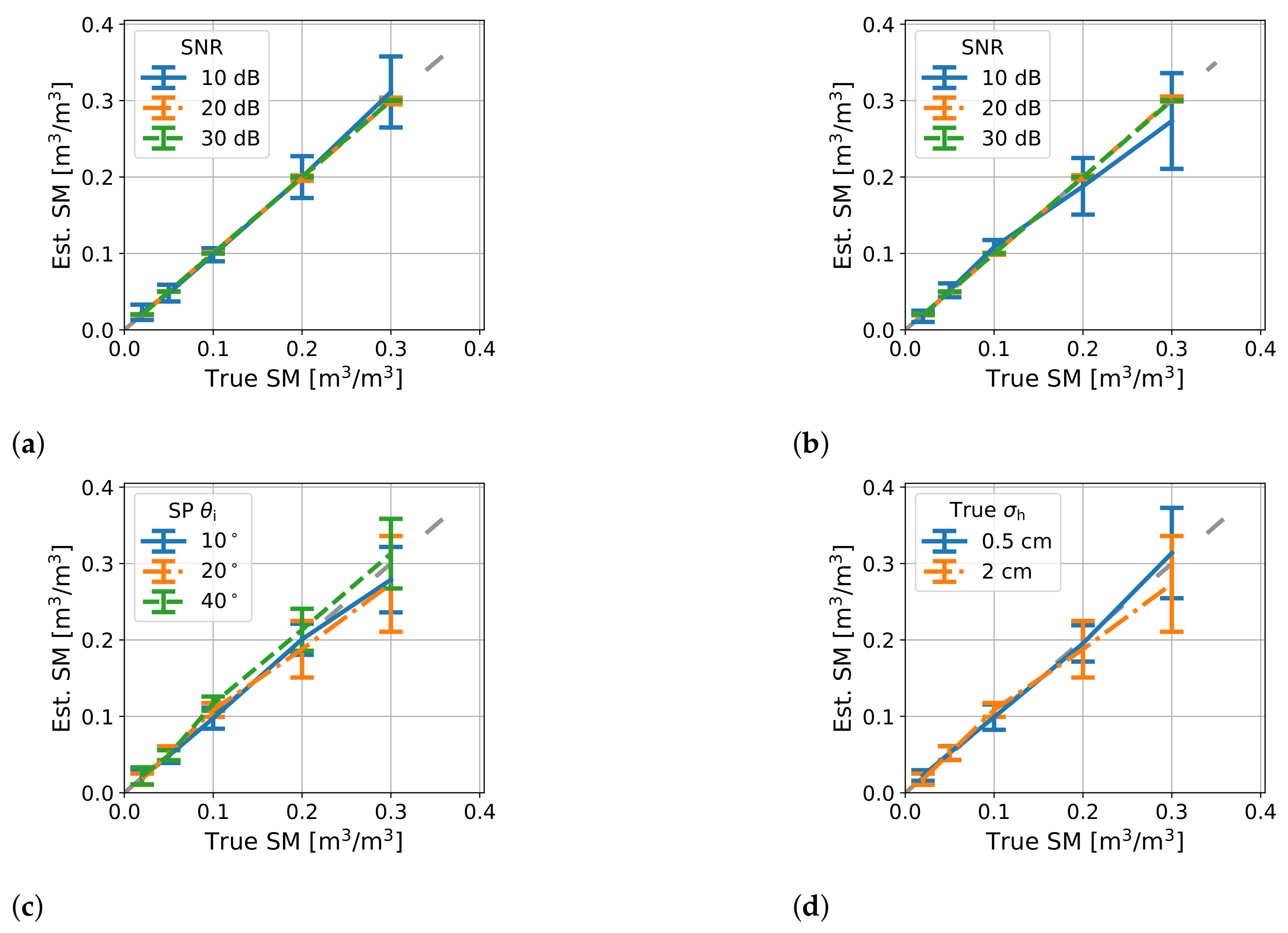
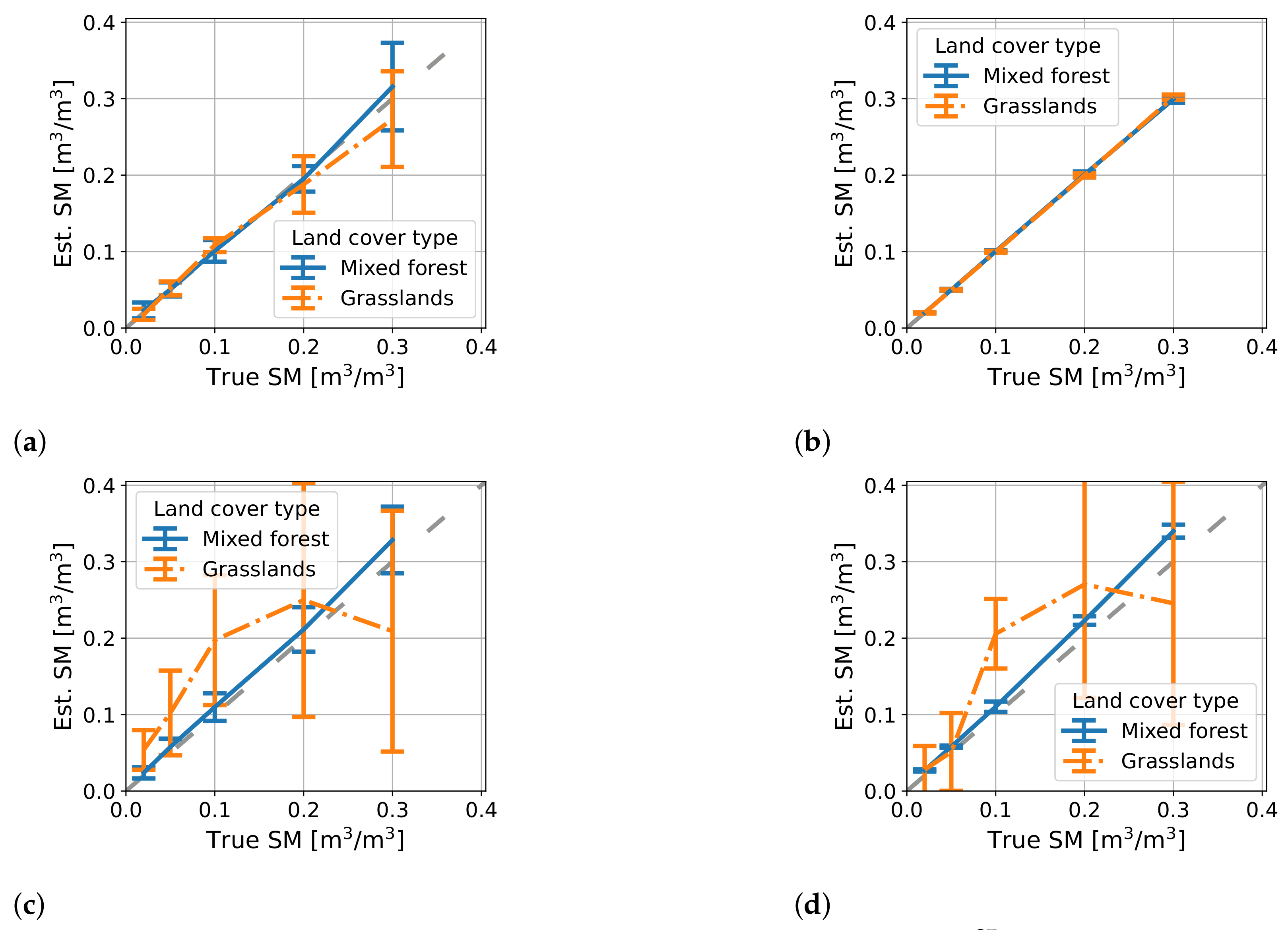
6.1. Simulation Results
6.1.1. Retrievals from a Single DDM
6.1.2. Retrievals from Two DDMs
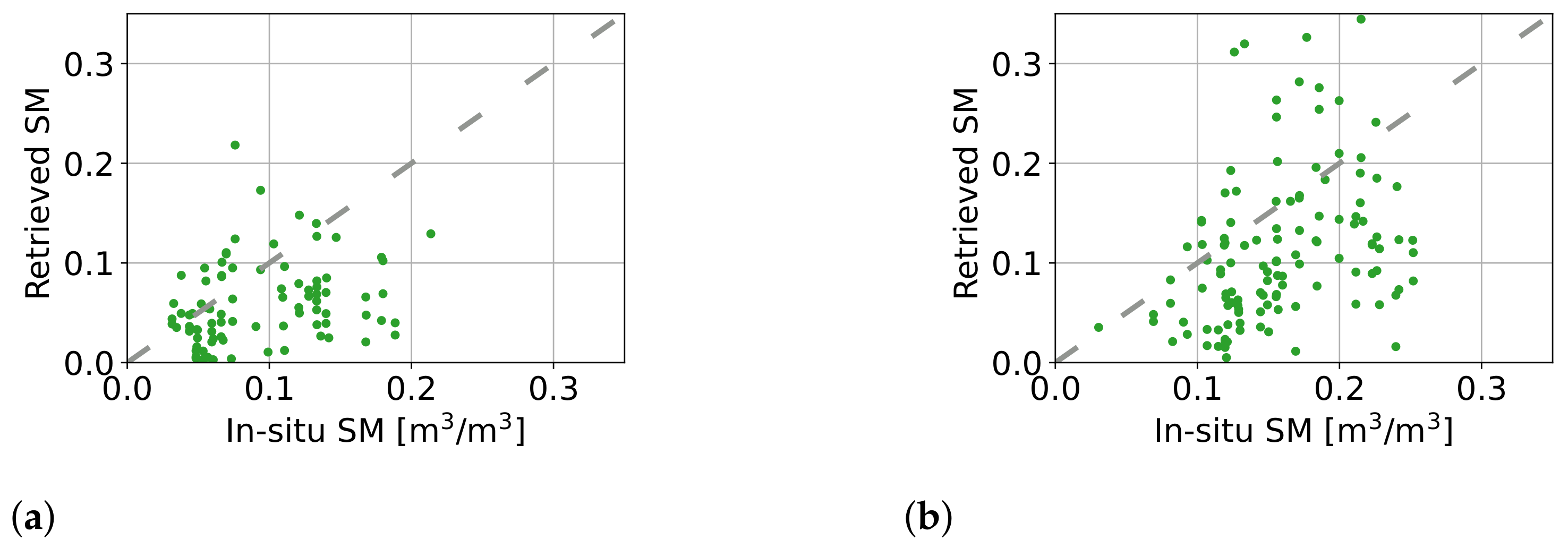
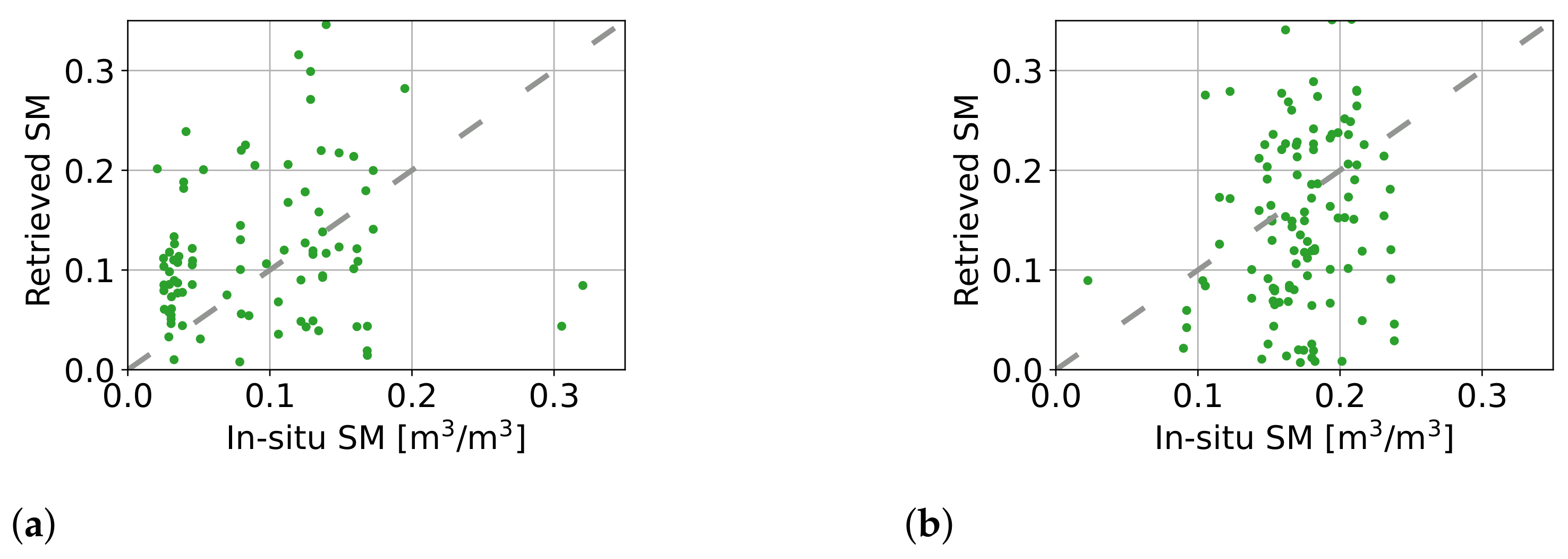
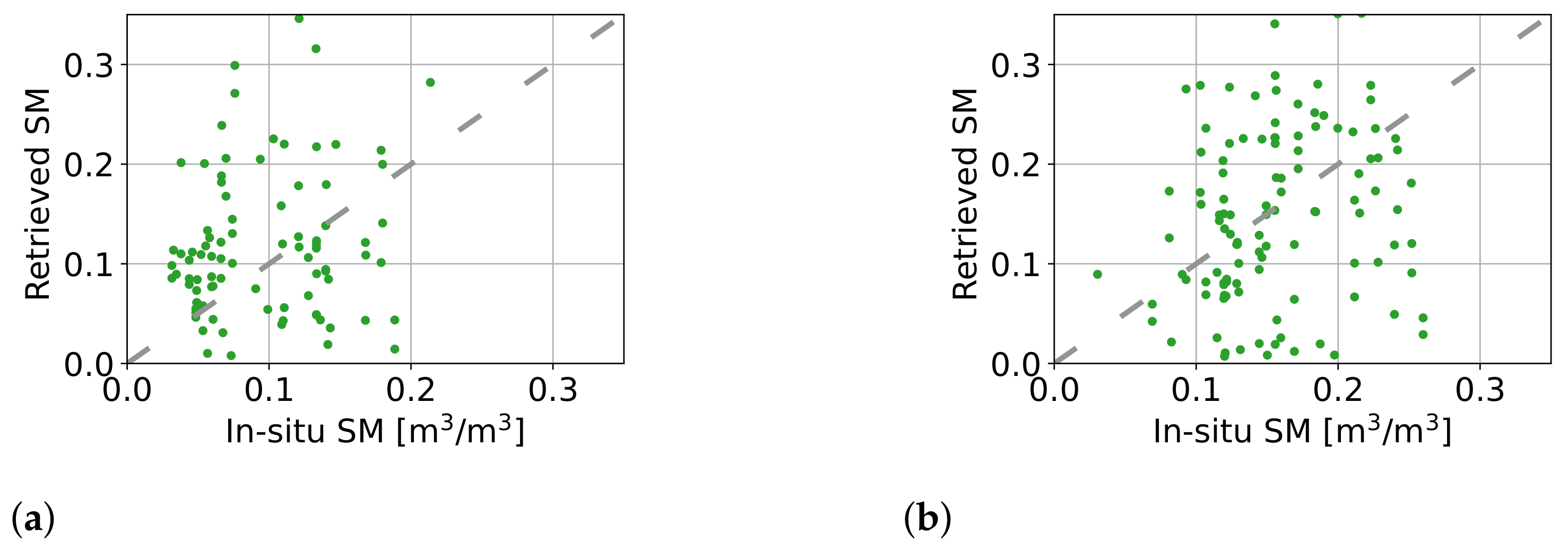
6.2. Validation Results
6.2.1. Results of First Retrieval Scheme: Soil Moisture Is the Only Unknown
6.2.2. Results of Second Retrieval Scheme: Both Soil Moisture and Surface Roughness Are Unknowns
7. Discussion
- The footprint of CYGNSS DDM is large, but the in situ soil moisture sensors cover a small region of the foot-print. Thus, the average soil moisture value, which is observed by the CYGNSS DDM, could be different from the in situ soil moisture values.
- Any possible variations in vegetation land cover over the course of the year resulting in variations in the vegetation input parameters, which potentially lead to errors in the SSBM predictions.
- Calibration issues in CYGNSS data.
- Modeling errors, which include the lack of considering topography and multi ground layers, potentially lead to less accurate results.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the Method of Estimating Incidence and Scattering Angles of DDM Bins
References
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Yisok, O. Quantitative Retrieval of Soil Moisture Content and Surface Roughness from Multipolarized Radar Observations of Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 2004, 42, 596–601. [Google Scholar] [CrossRef]
- Das, N.N.; Entekhabi, D.; Njoku, E.G. An Algorithm for Merging SMAP Radiometer and Radar Data for High-Resolution Soil-Moisture Retrieval. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1504–1512. [Google Scholar] [CrossRef]
- Kim, S.; van Zyl, J.J.; Johnson, J.T.; Moghaddam, M.; Tsang, L.; Colliander, A.; Dunbar, R.S.; Jackson, T.J.; Jaruwatanadilok, S.; West, R.; et al. Surface Soil Moisture Retrieval Using the L-Band Synthetic Aperture Radar Onboard the Soil Moisture Active–Passive Satellite and Evaluation at Core Validation Sites. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1897–1914. [Google Scholar] [CrossRef] [PubMed]
- Panciera, R.; Walker, J.P.; Jackson, T.J.; Gray, D.A.; Tanase, M.A.; Ryu, D.; Monerris, A.; Yardley, H.; Rüdiger, C.; Wu, X.; et al. The Soil Moisture Active Passive Experiments (SMAPEx): Toward Soil Moisture Retrieval From the SMAP Mission. IEEE Trans. Geosci. Remote Sens. 2014, 52, 490–507. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.; Martinuzzi, J.; Font, J.; Berger, M. Soil Moisture Retrieval from Space: The Soil Moisture and Ocean Salinity (SMOS) Mission. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1729–1735. [Google Scholar] [CrossRef]
- Hensley, S.; Michel, T.; Van Zyl, J.; Muellerschoen, R.; Chapman, B.; Oveisgharan, S.; Haddad, Z.S.; Jackson, T.; Mladenova, I. Effect of Soil Moisture on Polarimetric-Interferometric Repeat Pass Observations by UAVSAR during 2010 Canadian Soil Moisture campaign. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 1063–1066. [Google Scholar] [CrossRef]
- Moghaddam, M.; Rahmat-Samii, Y.; Rodriguez, E.; Entekhabi, D.; Hoffman, J.; Moller, D.; Pierce, L.E.; Saatchi, S.; Thomson, M. Microwave Observatory of Subcanopy and Subsurface (MOSS): A Mission Concept for Global Deep Soil Moisture Observations. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2630–2643. [Google Scholar] [CrossRef]
- Zhu, L.; Walker, J.P.; Ye, N.; Rüdiger, C.; Hacker, J.M.; Panciera, R.; Tanase, M.A.; Wu, X.; Gray, D.A.; Stacy, N.; et al. The Polarimetric L-Band Imaging Synthetic Aperture Radar (PLIS): Description, Calibration, and Cross-Validation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4513–4525. [Google Scholar] [CrossRef]
- Pathe, C.; Wagner, W.; Sabel, D.; Doubkova, M.; Basara, J. Using Envisat Asar Global Mode Data for Surface Soil Moisture Retrieval over Oklahoma, USA. IEEE Trans. Geosci. Rem. Sens. 2009, 47, 468–480. [Google Scholar] [CrossRef]
- Dazhi, L.; Rui, J.; Tao, C.; Jeffrey, W.; Ying, G.; Nan, Y.; Shuguo, W. Soil Moisture Retrieval from Airborne PLMR and MODIS Productsinthe ZhangyeOasisof MiddleStream ofHeihe River Basin, China. Adv. Earth Sci. 2014, 29, 295–305. [Google Scholar]
- Azemati, A.; Moghaddam, M. Modeling and Analysis of Bistatic Scattering from Forests in Support of Soil Moisture Retrieval. In Proceedings of the 2017 IEEE International Symposium on Antennas and Propagation USNC/URSI National Radio Science Meeting, San Diego, CA, USA, 9–14 July 2017; pp. 1833–1834. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Ticconi, F.; Brogioni, M. Radar Bistatic Configurations for Soil Moisture Retrieval: A Simulation Study. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3252–3264. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results Over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of Near-Surface Soil Moisture on GPS SNR Data: Development of a Retrieval Algorithm for Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2014, 52, 537–543. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef] [Green Version]
- Shah, R.; Zuffada, C.; Chew, C.; Lavalle, M.; Xu, X.; Azemati, A. Modeling Bistatic Scattering Signatures from Sources of Opportunity in P-Ka Bands. In Proceedings of the 2017 International Conference on Electromagnetics in Advanced Applications (ICEAA), Verona, Italy, 11–15 September 2017; pp. 1684–1687. [Google Scholar] [CrossRef]
- Ruf, C.; Chang, P.S.; Clarizia, M.P.; Gleason, S.; Jelenak, Z.; Majumdar, S.; Morris, M.; Murray, J.; Musko, S.; Posselt, D.; et al. CYGNSS Handbook; Michigan Publishing: Ann Arbor, MI, USA, 2016. [Google Scholar]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS Data for Soil Moisture Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Chew, C.; Small, E. Description of the UCAR/CU Soil Moisture Product. Remote Sens. 2020, 12, 1558. [Google Scholar] [CrossRef]
- Senyurek, V.; Lei, F.; Boyd, D.; Kurum, M.; Gurbuz, A.C.; Moorhead, R. Machine Learning-Based CYGNSS Soil Moisture Estimates over ISMN Sites in CONUS. Remote Sens. 2020, 12, 1168. [Google Scholar] [CrossRef] [Green Version]
- Senyurek, V.; Lei, F.; Boyd, D.; Gurbuz, A.C.; Kurum, M.; Moorhead, R. Evaluations of Machine Learning-Based CYGNSS Soil Moisture Estimates against SMAP Observations. Remote Sens. 2020, 12, 3503. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T. Soil Moisture Retrievals Using CYGNSS Data in a Time-Series Ratio Method: Progress Update and Error Analysis. IEEE Geosci. Remote Sens. Lett. 2021, 19, 3003505. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; O’Brien, A.J.; Balenzano, A.; Mattia, F. Time-Series Retrieval of Soil Moisture Using CYGNSS. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4322–4331. [Google Scholar] [CrossRef]
- Azemati, A.; Moghaddam, M.; Bhat, A. Relationship Between Bistatic Radar Scattering Cross Sections and GPS Reflectometry Delay-Doppler Maps Over Vegetated Land in Support of Soil Moisture Retrieval. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7480–7482. [Google Scholar] [CrossRef]
- Azemati, A.; Moghaddam, M. Circular-Linear Polarization Signatures in Bistatic Scattering Models Applied to Signals of Opportunity. In Proceedings of the 2017 International Conference on Electromagnetics in Advanced Applications (ICEAA), Verona, Italy, 11–15 September 2017; pp. 1825–1827. [Google Scholar] [CrossRef]
- Azemati, A.; Bhat, A.; Walker, J.; Moghaddam, M. A Discrete Scatterer Bistatic Radar Scattering Model for Vegetated Land Surface in Support of Soil Moisture Retrieval. IEEE Trans. Geosci. Remote Sens. in-review.
- Etminan, A.; Moghaddam, M. Electromagnetic Imaging of Dielectric Objects Using a Multidirectional-Search-Based Simulated Annealing. IEEE J. Multiscale Multiphys. Comput. Tech. 2018, 3, 167–175. [Google Scholar] [CrossRef]
- Durden, S.L.; van Zyl, J.J.; Zebker, H.A. Modeling and Observation of the Radar Polarization Signature of Forested Areas. IEEE Trans. Geosci. Remote Sens. 1989, 27, 290–301. [Google Scholar] [CrossRef]
- Mironov, V.L.; Kosolapova, L.G.; Fomin, S.V. Physically and Mineralogically Based Spectroscopic Dielectric Model for Moist Soils. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2059–2070. [Google Scholar] [CrossRef]
- Burgin, M.; Clewley, D.; Lucas, R.M.; Moghaddam, M. A Generalized Radar Backscattering Model Based on Wave Theory for Multilayer Multispecies Vegetation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4832–4845. [Google Scholar] [CrossRef]
- Ulaby, F.; Long, D.; Blackwell, W.; Elachi, C.; Fung, A.; Ruf, C.; Sarabandi, K.; Zebker, H.; Van Zyl, J. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Burgin, M.S.; Khankhoje, U.K.; Duan, X.; Moghaddam, M. Generalized Terrain Topography in Radar Scattering Models. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3944–3952. [Google Scholar] [CrossRef]
- Campbell, J.D. Electromagnetic Scattering Models for Satellite Remote Sensing of Soil Moisture Using Reflectometry from Microwave Signals of Opportunity. Ph.D. Thesis, University of Southern California, Los Angeles, CA, USA, 2019. [Google Scholar]
- Voronovich, A.G.; Zavorotny, V.U. Bistatic Radar Equation for Signals of Opportunity Revisited. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1959–1968. [Google Scholar] [CrossRef]
- Kim, S.; Moghaddam, M.; Tsang, L.; Burgin, M.; Xu, X.; Njoku, E.G. Models of L-Band Radar Backscattering Coefficients Over Global Terrain for Soil Moisture Retrieval. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1381–1396. [Google Scholar] [CrossRef]
- Smith, A.B.; Walker, J.P.; Western, A.W.; Young, R.I.; Ellett, K.M.; Pipunic, R.C.; Grayson, R.B.; Siriwardena, L.; Chiew, F.H.S.; Richter, H. The Murrumbidgee Soil Moisture Monitoring Network Data Set. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Young, R.; Walker, J.; Yeoh, N.; Smith, A.; Ellett, K.; Merlin, O.; Western, A. Soil Moisture and Meteorological Observations From the Murrumbidgee Catchment; Technical Report; Department of Civil and Environmental Engineering, The University of Melbourne: Melbourne, Australia, 2008. [Google Scholar]
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W.T. Performance Metrics for Soil Moisture Retrievals and Application Requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Magagi, R.; Berg, A.A.; Goita, K.; Belair, S.; Jackson, T.J.; Toth, B.; Walker, A.; McNairn, H.; O’Neill, P.E.; Moghaddam, M.; et al. Canadian Experiment for Soil Moisture in 2010 (CanEx-SM10): Overview and Preliminary Results. IEEE Trans. Geosci. Remote Sens. 2013, 51, 347–363. [Google Scholar] [CrossRef] [Green Version]
- Tabatabaeenejad, A.; Burgin, M.; Duan, X.; Moghaddam, M. P-Band Radar Retrieval of Subsurface Soil Moisture Profile as a Second-Order Polynomial: First AirMOSS Results. IEEE Trans. Geosci. Remote Sens. 2015, 53, 645–658. [Google Scholar] [CrossRef]
- Tissott, B.; Mueller, N. DEA Land Cover 25m, Geoscience Australia, Canberra. 2022. Available online: https://ecat.ga.gov.au/geonetwork/srv/eng/catalog.search#/metadata/146090 (accessed on 23 June 2022). [CrossRef]
- Campbell, J.D.; Melebari, A.; Moghaddam, M. Modeling the Effects of Topography on Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1740–1751. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Thompson, D.R.; Linstrom, L. Delay-Doppler Analysis of Bistatically Reflected Signals from the Ocean Surface: Theory and Application. IEEE Trans. Geosci. Remote Sens. 2002, 40, 560–573. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Grassland | Mixed Forest |
|---|---|---|
| Large branch dielectric constant | 15 + i3 | 32 + i4 |
| Large branch length | ||
| Large branch radius | ||
| Large branch density | ||
| Short branch dielectric constant | 15 + j3 | 32 + i4 |
| Short branch length | ||
| Short branch radius | ||
| Short branch density | ||
| Trunk dielectric constant | 15 + i3 | 36 + i4 |
| Trunk/stalk length | ||
| Trunk/stalk radius | ||
| Trunk/stalk density | ||
| VWC |
| Year | Scheme | In-Situ Sensors | Num. of Retrievals | Discarded Retrievals | RMSE | ubRMSE | Bias | r |
|---|---|---|---|---|---|---|---|---|
| 2019 | First | Y8 | 102 | 15 | 0.074 | 0.069 | 0.028 | 0.28 |
| Y5, Y7, Y8 | 0.068 | 0.060 | 0.032 | 0.26 | ||||
| Second | Y8 | 13 | 0.096 | 0.091 | 0.028 | 0.15 | ||
| Y5, Y7, Y8 | 0.088 | 0.085 | 0.025 | 0.13 | ||||
| 2020 | First | Y8 | 148 | 22 | 0.104 | 0.090 | 0.052 | 0.28 |
| Y5, Y7, Y8 | 0.098 | 0.091 | 0.036 | 0.30 | ||||
| Second | Y8 | 22 | 0.116 | 0.116 | 0.005 | 0.21 | ||
| Y5, Y7, Y8 | 0.120 | 0.118 | 0.020 | 0.21 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azemati, A.; Melebari, A.; Campbell, J.D.; Walker, J.P.; Moghaddam, M. GNSS-R Soil Moisture Retrieval for Flat Vegetated Surfaces Using a Physics-Based Bistatic Scattering Model and Hybrid Global/Local Optimization. Remote Sens. 2022, 14, 3129. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14133129
Azemati A, Melebari A, Campbell JD, Walker JP, Moghaddam M. GNSS-R Soil Moisture Retrieval for Flat Vegetated Surfaces Using a Physics-Based Bistatic Scattering Model and Hybrid Global/Local Optimization. Remote Sensing. 2022; 14(13):3129. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14133129
Chicago/Turabian StyleAzemati, Amir, Amer Melebari, James D. Campbell, Jeffrey P. Walker, and Mahta Moghaddam. 2022. "GNSS-R Soil Moisture Retrieval for Flat Vegetated Surfaces Using a Physics-Based Bistatic Scattering Model and Hybrid Global/Local Optimization" Remote Sensing 14, no. 13: 3129. https://0-doi-org.brum.beds.ac.uk/10.3390/rs14133129