Author Contributions
Conceptualization, T.W., D.C., M.H. and X.M. (Xiaoliang Meng); methodology, T.W., D.C., M.H., X.M. (Xiaoli Ma) and W.S.; software, W.S.; validation, T.W., W.S. and P.Y.; formal analysis, D.C.; investigation, D.C. and W.S.; resources, D.C. and X.M. (Xiaoli Ma); data curation, T.W., W.S., X.M. (Xiaoliang Meng) and P.Y.; writing—original draft preparation, D.C. and W.S.; writing—review and editing, T.W., X.M. (Xiaoliang Meng), X.M. (Xiaoli Ma) and P.Y.; visualization, D.C., X.M. (Xiaoliang Meng) and W.S.; supervision, D.C., M.H. and X.M. (Xiaoliang Meng); project administration, D.C., X.M. (Xiaoliang Meng), M.H. and P.Y.; funding acquisition, D.C., X.M. (Xiaoliang Meng), M.H. and P.Y. All authors have read and agreed to the published version of the manuscript.
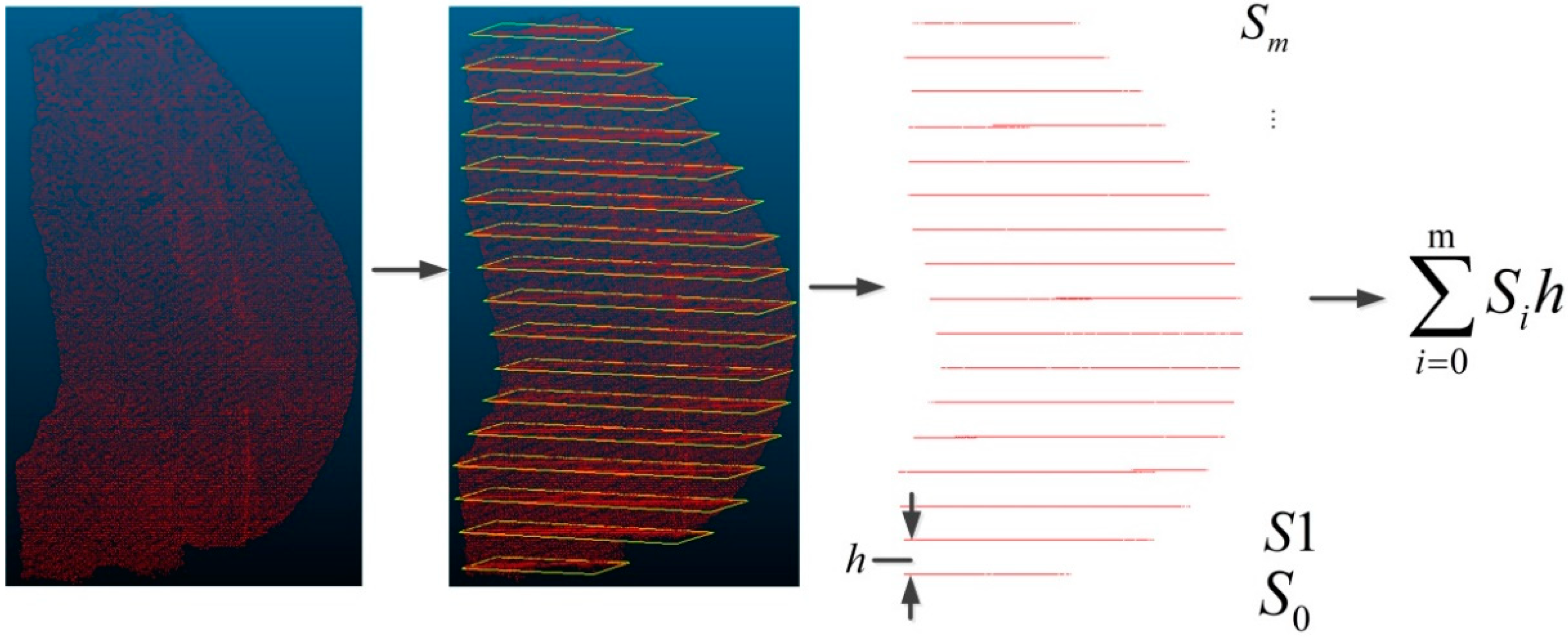
Figure 1.
Schematic diagram of point cloud slicing method. The large irregular object is first divided into a series of parallel slices. Then, by calculating the area of the polygons within each slice, the method sums up these areas multiplied by the interval between the slices to obtain an approximate volume value.
Figure 1.
Schematic diagram of point cloud slicing method. The large irregular object is first divided into a series of parallel slices. Then, by calculating the area of the polygons within each slice, the method sums up these areas multiplied by the interval between the slices to obtain an approximate volume value.
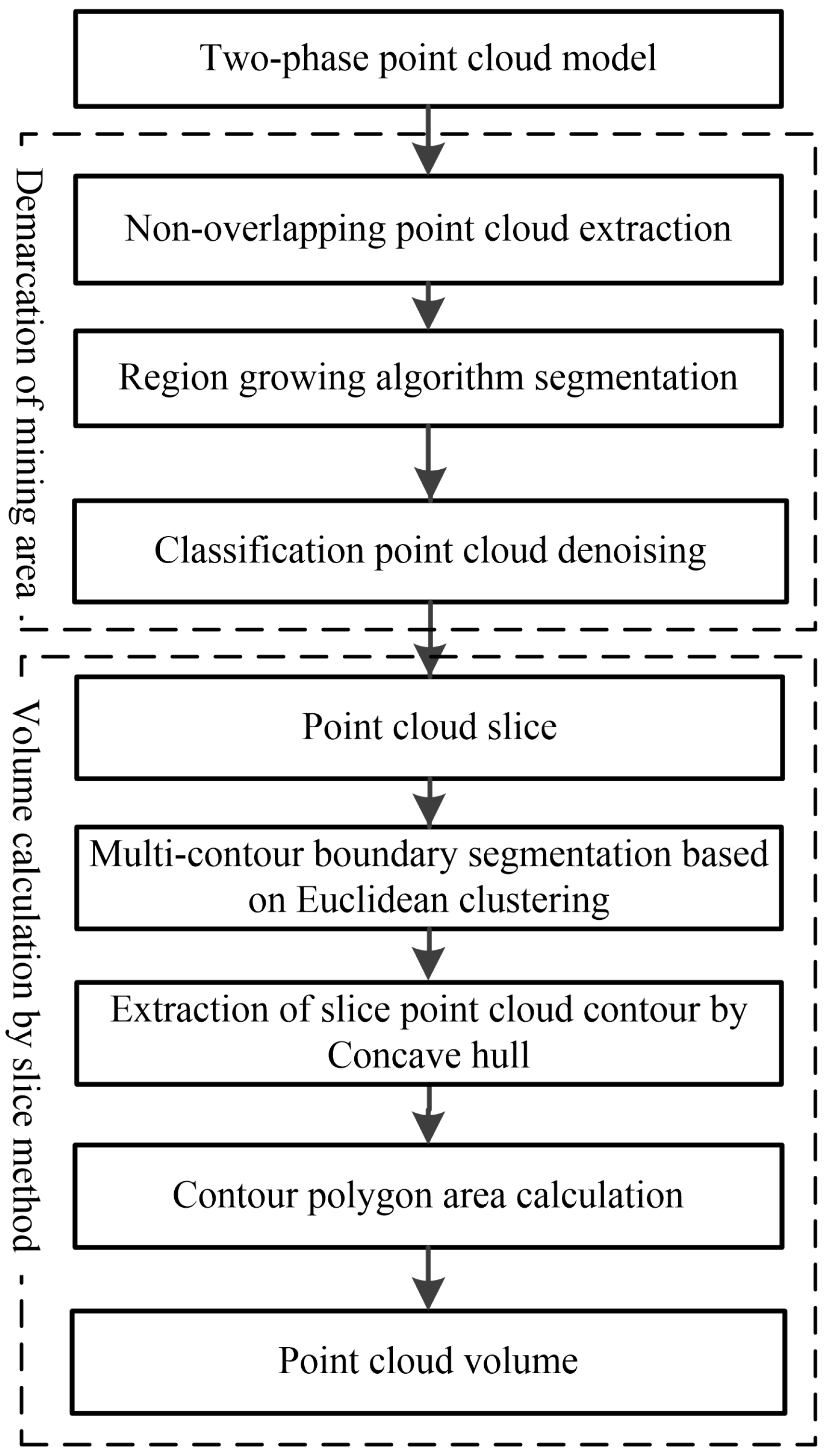
Figure 2.
A flow chart of the volume measurement by the cloud slicing method in an open-pit mine. To begin with, the segmentation of irregular bodies takes place. Specifically, this involves the extraction of non-overlapping regions, which effectively identify the mining zones. Subsequently, a region growing algorithm is employed to subdivide the mining zones into numerous irregular bodies. Finally, a point cloud denoising process is carried out. Following this, the proposed enhanced point cloud slicing algorithm is employed to sequentially calculate the volume of each irregular body. The results of these individual volume calculations are then aggregated to determine the overall mining volume.
Figure 2.
A flow chart of the volume measurement by the cloud slicing method in an open-pit mine. To begin with, the segmentation of irregular bodies takes place. Specifically, this involves the extraction of non-overlapping regions, which effectively identify the mining zones. Subsequently, a region growing algorithm is employed to subdivide the mining zones into numerous irregular bodies. Finally, a point cloud denoising process is carried out. Following this, the proposed enhanced point cloud slicing algorithm is employed to sequentially calculate the volume of each irregular body. The results of these individual volume calculations are then aggregated to determine the overall mining volume.
Figure 3.
A sketch map of extraction of the mining area. Commence by extracting the non-overlapping area of the Phase 2 point cloud in comparison to the Phase 1 point cloud. Subsequently, retrieve the non-overlapping area of the Phase 1 point cloud concerning the Phase 2 point cloud. The culmination of these outcomes shapes the mining area, as highlighted by the red annotation within the illustration.
Figure 3.
A sketch map of extraction of the mining area. Commence by extracting the non-overlapping area of the Phase 2 point cloud in comparison to the Phase 1 point cloud. Subsequently, retrieve the non-overlapping area of the Phase 1 point cloud concerning the Phase 2 point cloud. The culmination of these outcomes shapes the mining area, as highlighted by the red annotation within the illustration.
Figure 4.
The primary reasons for anomalies in multi-contour boundary extraction using the bidirectional nearest point search method are as follows. (a) The distances between the contours of multiple contour boundaries are excessively far, resulting in the formation of a connected anomalous edge, as illustrated in (a). (b) Irregularities in the extraction of contour polygons arise from uneven point cloud density, as depicted in (b).
Figure 4.
The primary reasons for anomalies in multi-contour boundary extraction using the bidirectional nearest point search method are as follows. (a) The distances between the contours of multiple contour boundaries are excessively far, resulting in the formation of a connected anomalous edge, as illustrated in (a). (b) Irregularities in the extraction of contour polygons arise from uneven point cloud density, as depicted in (b).
Figure 5.
Illustration of the combined Delaunay-based concave hull algorithm for contour extraction. Each slice’s point cloud undergoes Delaunay triangulation. Following this, the boundaries of triangles forming convex polygons are identified. For each recognized convex polygon contour, the concave hull algorithm is employed to combine the contours into a unified boundary.
Figure 5.
Illustration of the combined Delaunay-based concave hull algorithm for contour extraction. Each slice’s point cloud undergoes Delaunay triangulation. Following this, the boundaries of triangles forming convex polygons are identified. For each recognized convex polygon contour, the concave hull algorithm is employed to combine the contours into a unified boundary.
Figure 6.
The experimental data. (a) Point cloud data from the first phase of the first group. (b) Point cloud data from the second phase of the first group. (c) Point cloud data from the first phase of the second group. (d) Point cloud data from the second phase of the second group.
Figure 6.
The experimental data. (a) Point cloud data from the first phase of the first group. (b) Point cloud data from the second phase of the first group. (c) Point cloud data from the first phase of the second group. (d) Point cloud data from the second phase of the second group.
Figure 7.
Non-overlapping point cloud extraction results. (a) First phase of the original point cloud in the first group. (b) First phase of non-overlapping point clouds in the first group. (c) Top view of the merging of non-overlapping point clouds in the first group during two periods. (d) Second phase of the original point cloud in the first group. (e) Second non-overlapping point cloud in the first group. (f) Bottom view of the merging of non-overlapping point clouds in the first group during two periods. (g) First phase of the original point cloud in the second group. (h) First phase of non-overlapping point clouds in the second group. (i) Top view of the merging of non-overlapping point clouds in the second group during two periods. (j) Second phase of the original point cloud in the second group. (k) Second non-overlapping point cloud in the second group. (l) Bottom view of the merging of non-overlapping point clouds in the second group during two periods.
Figure 7.
Non-overlapping point cloud extraction results. (a) First phase of the original point cloud in the first group. (b) First phase of non-overlapping point clouds in the first group. (c) Top view of the merging of non-overlapping point clouds in the first group during two periods. (d) Second phase of the original point cloud in the first group. (e) Second non-overlapping point cloud in the first group. (f) Bottom view of the merging of non-overlapping point clouds in the first group during two periods. (g) First phase of the original point cloud in the second group. (h) First phase of non-overlapping point clouds in the second group. (i) Top view of the merging of non-overlapping point clouds in the second group during two periods. (j) Second phase of the original point cloud in the second group. (k) Second non-overlapping point cloud in the second group. (l) Bottom view of the merging of non-overlapping point clouds in the second group during two periods.
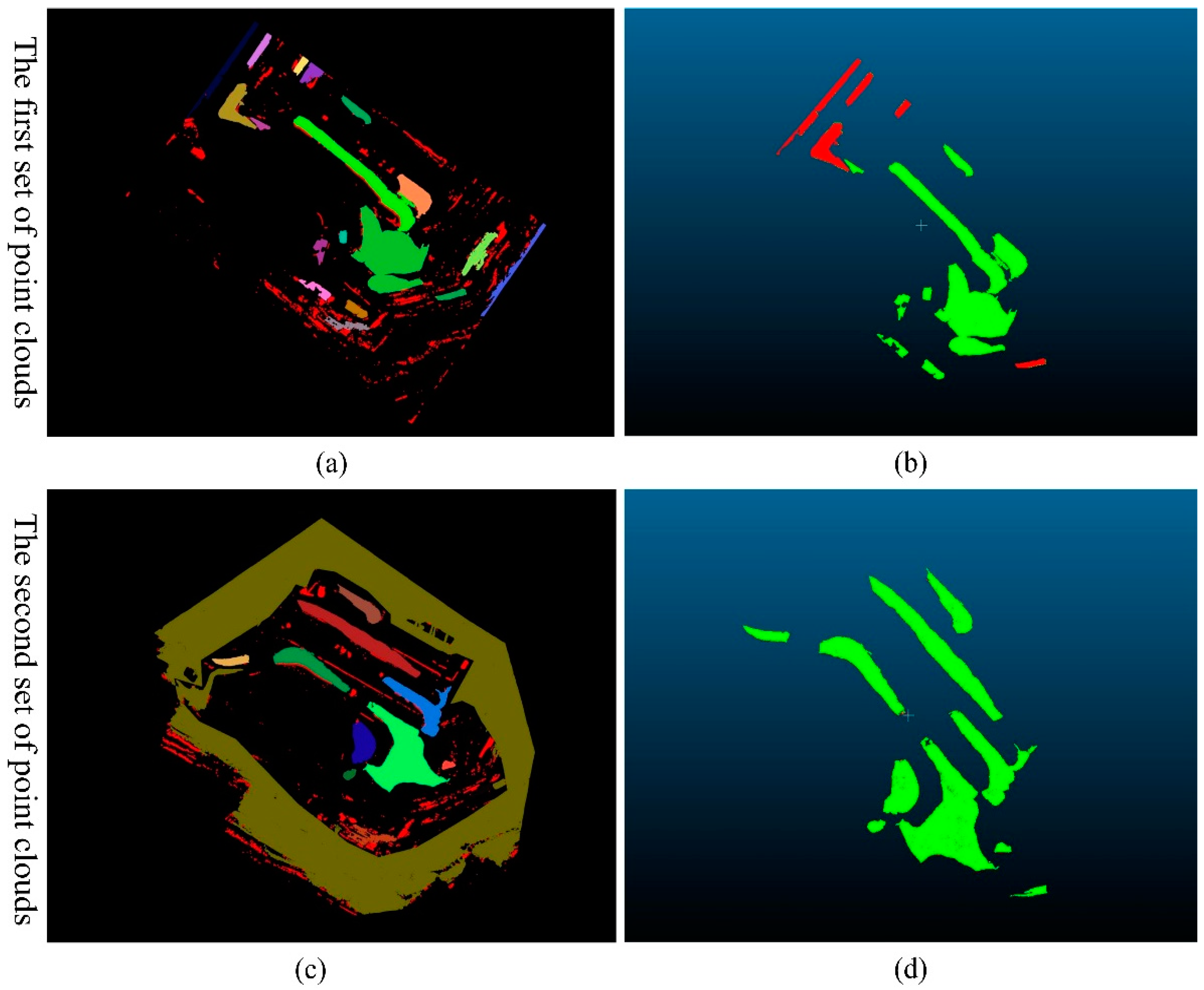
Figure 8.
Point cloud preprocessing results. (a) The first group of point cloud classification results. (b) The first group of point cloud denoising results. (c) The second group of point cloud classification results. (d) The second group of point cloud denoising results. It is important to highlight that, within the classification results, as depicted in (a,c), distinct colors have been employed to designate various categories, each corresponding to an autonomous irregular body. In terms of denoising results, as depicted in (b,d), it is evident that there are significantly fewer noise points in comparison to those present in (a,c).
Figure 8.
Point cloud preprocessing results. (a) The first group of point cloud classification results. (b) The first group of point cloud denoising results. (c) The second group of point cloud classification results. (d) The second group of point cloud denoising results. It is important to highlight that, within the classification results, as depicted in (a,c), distinct colors have been employed to designate various categories, each corresponding to an autonomous irregular body. In terms of denoising results, as depicted in (b,d), it is evident that there are significantly fewer noise points in comparison to those present in (a,c).
Figure 9.
Partial point cloud data and their slicing results. (a) Unsegmented point cloud dataset. (b) Point cloud dataset after slicing in the cutting plane illustrated in (a), showcasing the existence of both single-contour boundaries, as observed at d = 165, and multi-contour boundaries, as evidenced by d = 137.
Figure 9.
Partial point cloud data and their slicing results. (a) Unsegmented point cloud dataset. (b) Point cloud dataset after slicing in the cutting plane illustrated in (a), showcasing the existence of both single-contour boundaries, as observed at d = 165, and multi-contour boundaries, as evidenced by d = 137.
Figure 10.
The multi-contour boundary extraction results. The point clouds within the slices might encompass multiple contours. To address this, the Euclidean clustering method is applied for the segmentation of these numerous contours. Subsequently, the concave hull algorithm is employed to independently extract the boundaries of each contour from the point cloud. Taking the instance of d = 38 in the illustration, the Euclidean clustering algorithm segregates the left and right contours within the slice. Following contour extraction, two closed polygons are accurately generated.
Figure 10.
The multi-contour boundary extraction results. The point clouds within the slices might encompass multiple contours. To address this, the Euclidean clustering method is applied for the segmentation of these numerous contours. Subsequently, the concave hull algorithm is employed to independently extract the boundaries of each contour from the point cloud. Taking the instance of d = 38 in the illustration, the Euclidean clustering algorithm segregates the left and right contours within the slice. Following contour extraction, two closed polygons are accurately generated.
Figure 11.
Comparison of multi-contour boundary extraction results using different methods within the sliced point clouds. (a) Scatter profile of the original sliced point cloud and its default sorted contours. (b) Contours sorted using the traditional point cloud slicing method. (c) Contours sorted using the proposed enhanced point cloud slicing method. It is evident that our method provides more accurate results when dealing with uneven point cloud densities and the presence of multiple contours within the slices (e.g., d = 138, d = 37).
Figure 11.
Comparison of multi-contour boundary extraction results using different methods within the sliced point clouds. (a) Scatter profile of the original sliced point cloud and its default sorted contours. (b) Contours sorted using the traditional point cloud slicing method. (c) Contours sorted using the proposed enhanced point cloud slicing method. It is evident that our method provides more accurate results when dealing with uneven point cloud densities and the presence of multiple contours within the slices (e.g., d = 138, d = 37).
Figure 12.
The chosen point cloud data and their respective 3D modeled results. (a) Depicts the first group of point cloud data. (a1–a8) Correspond to the modeled outcomes of the eight subsets of point clouds within (a). (b) Represents the second group of point cloud data. Likewise, (b1–b9) correspond to the modeled outcomes of all irregular bodies within (b).
Figure 12.
The chosen point cloud data and their respective 3D modeled results. (a) Depicts the first group of point cloud data. (a1–a8) Correspond to the modeled outcomes of the eight subsets of point clouds within (a). (b) Represents the second group of point cloud data. Likewise, (b1–b9) correspond to the modeled outcomes of all irregular bodies within (b).
Table 1.
The results of partial position-sliced cross-sectional areas for the same selected region.
Table 1.
The results of partial position-sliced cross-sectional areas for the same selected region.
| No | Slicing Position | Actual Area/m2 | No | Slicing Position | Actual Area/m2 |
|---|
| 1 | d = 9.5 | 941.39 | 5 | d = 114.5 | 3928.04 |
| 2 | d = 38 | 1246.47 | 6 | d = 125.75 | 3775.72 |
| 3 | d = 63.5 | 2710.73 | 7 | d = 137 | 2383.83 |
| 4 | d = 90.5 | 4109.29 | 8 | d = 165 | 933.82 |
Table 2.
Partial point cloud volume calculation results using the enhanced slicing method.
Table 2.
Partial point cloud volume calculation results using the enhanced slicing method.
| Index of Slice | Slicing Position | Computed Slice Volume/m3 |
|---|
| 1 | d = 0.5 | 7.014 |
| 2 | d = 1.0 | 8.488 |
| 3 | d = 1.5 | 13.858 |
| …… | …… | …… |
| 768 | d = 376.00 | 4.694 |
| 769 | d = 376.50 | 1.940 |
Table 3.
Area calculation accuracy between the proposed method and the traditional approach.
Table 3.
Area calculation accuracy between the proposed method and the traditional approach.
| Slicing Position | Actual Area/m2 | Traditional Point Cloud Slicing Method Area/m2 | Enhanced Point Cloud Slicing Method Area/m2 | Relative Error of the Traditional Point Cloud Slicing Method/% | Relative Error of the Enhanced Point Cloud Slicing Method/% |
|---|
| d = 9.5 | 941.39 | 950.65 | 950.65 | 0.98 | 0.98 |
| d = 38 | 1246.47 | 946.35 | 1260.73 | 24.08 | 1.14 |
| d = 63.5 | 2710.73 | 2563.18 | 2735.54 | 5.44 | 0.92 |
| d = 90.5 | 4109.29 | 2869.72 | 4144.27 | 30.17 | 0.85 |
| d = 114.5 | 3928.04 | 3937.9 | 3943.13 | 0.25 | 0.38 |
| d = 125.75 | 3775.72 | 3804.14 | 3804.14 | 0.75 | 0.75 |
| d = 137 | 2383.83 | 1485.85 | 2387.26 | 37.67 | 0.14 |
| d = 165 | 933.82 | 941.54 | 941.54 | 0.83 | 0.83 |
Table 4.
Comparison of results and accuracy for calculating the volume of the first group of point cloud data.
Table 4.
Comparison of results and accuracy for calculating the volume of the first group of point cloud data.
| Point Cloud Serial Number | Modeling Method Volume/m3 | Traditional Point Cloud Slicing Method Volume/m3 | Slice Method Volume/m3 | Relative Error of the Traditional Point Cloud Slicing Method/% | Relative Error of the Enhanced Point Cloud Slicing Method/% |
|---|
| a1 | 36,208.19 | 33,799.44 | 36,025.30 | 6.65 | 0.51 |
| a2 | 414,880.44 | 402,798.03 | 420,520.21 | 2.91 | 1.36 |
| a3 | 17,048.50 | 13,097.49 | 16,623.47 | 23.18 | 2.49 |
| a4 | 108,175.28 | 97,901.53 | 107,930.93 | 9.50 | 0.23 |
| a5 | 25,438.97 | 22,395.62 | 24,712.33 | 11.96 | 2.86 |
| a6 | 8410.14 | 7047.13 | 8394.63 | 16.21 | 0.18 |
| a7 | 10,922.42 | 7511.08 | 11,103.48 | 31.23 | 1.66 |
| a8 | 820,913.03 | 726,134.21 | 835,475.17 | 11.55 | 1.77 |
Table 5.
Comparison of results and accuracy for calculating the volume of the second group of point cloud data.
Table 5.
Comparison of results and accuracy for calculating the volume of the second group of point cloud data.
| Point Cloud Serial Number | Modeling Method Volume/m3 | Traditional Point Cloud Slicing Method Volume/m3 | Slice Method Volume/m3 | Relative Error of the Traditional Point Cloud Slicing Method/% | Relative Error of the Enhanced Point Cloud Slicing Method/% |
|---|
| b1 | 446,229.99 | 352,648.54 | 434,473.97 | 20.97 | 2.63 |
| b2 | 77,430.82 | 72,141.67 | 76,804.89 | 6.83 | 0.81 |
| b3 | 180,884.95 | 169,572.10 | 180,961.12 | 6.25 | 0.04 |
| b4 | 170,941.48 | 159,884.40 | 169,831.03 | 6.47 | 0.65 |
| b5 | 272,074.44 | 255,381.54 | 271,756.67 | 6.14 | 0.12 |
| b6 | 170,232.95 | 163,264.25 | 166,888.61 | 4.09 | 1.96 |
| b7 | 22,383.55 | 18,142.17 | 22,509.83 | 18.95 | 0.56 |
| b8 | 6969.85 | 6222.12 | 7055.81 | 10.73 | 1.23 |
| b9 | 10,090.01 | 9429.14 | 9939.45 | 6.55 | 1.49 |
Table 6.
Comparison of different point cloud boundary extraction algorithms.
Table 6.
Comparison of different point cloud boundary extraction algorithms.
| Point Cloud Slice Number | Number of Contours in the Slice | The Time of the Bidirectional Nearest Neighbor Search Algorithm/ms | The Time of the Polygon Classification and Reconstruction Method/ms | The Time of the Concave Hull Algorithm (Proposed Method)/ms |
|---|
| s1 | 1 | 1.9690 | 2.4319 | 1.8616 |
| s2 | 1 | 0.7821 | 1.4755 | 0.9968 |
| s3 | 3 | 1.6324 | 1.9976 | 1.9851 |
| s4 | 2 | 1.8992 | 4.0701 | 2.0311 |
| s5 | 2 | 1.9936 | 1.8253 | 1.9951 |
| s6 | 1 | 1.8281 | 2.3841 | 1.9944 |
| s7 | 1 | 0.9991 | 1.2347 | 0.9973 |
Table 7.
Comparison of computational time for algorithms.
Table 7.
Comparison of computational time for algorithms.
| Point Cloud Serial Number | The Time of the Traditional Point Cloud Slicing Method/s | The Time of the Enhanced Point Cloud Slicing Method/s | Point Cloud Serial Number | The Time of the Traditional Point Cloud Slicing Method/s | The Time of the Enhanced Point Cloud Slicing Method/s |
|---|
| a1 | 14.03 | 12.35 | b1 | 396.68 | 374.05 |
| a2 | 375.53 | 365.78 | b2 | 35.63 | 33.12 |
| a3 | 4.87 | 3.58 | b3 | 118.2 | 116.37 |
| a4 | 61.26 | 56.46 | b4 | 86.32 | 82.14 |
| a5 | 15.54 | 14.63 | b5 | 219.65 | 214.48 |
| a6 | 2.98 | 1.71 | b6 | 47.75 | 44.56 |
| a7 | 8.23 | 6.82 | b7 | 4.01 | 3.51 |
| a8 | 582.95 | 568.31 | b8 | 1.01 | 0.93 |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}