
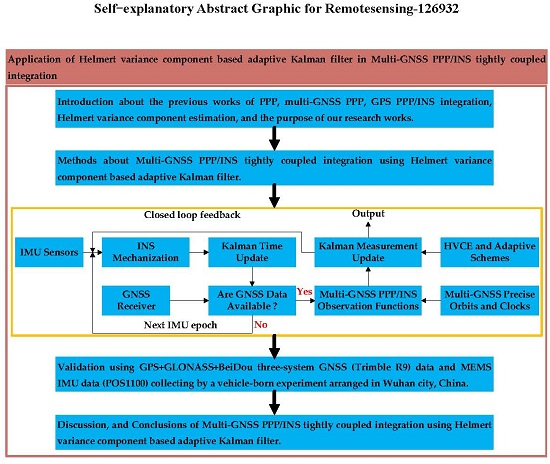
Application of Helmert Variance Component Based Adaptive Kalman Filter in Multi-GNSS PPP/INS Tightly Coupled Integration


Abstract
: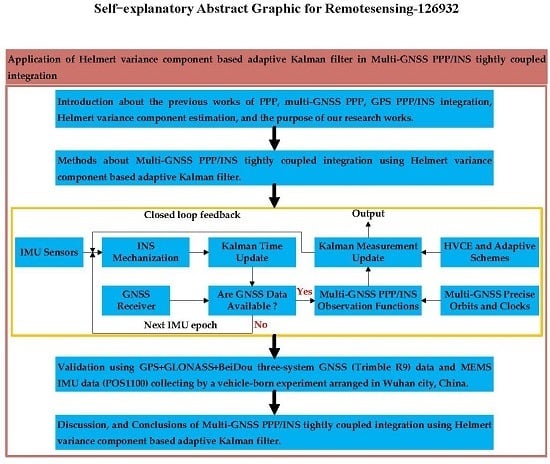
1. Introduction
2. Methods
2.1. Multi-GNSS PPP/INS Tightly Coupled Integration Functions
2.2. Helmert Variance Component Estimation Based Adaptive Kalman Filter
2.3. Implementation of Multi-GNSS PPP/INS Tightly Coupled Integration
3. Experiment Data
3.1. Data Processing Strategies and Models
3.2. Dynamic Property and Satellites Availability
4. Validation of Multi-GNSSPPP/INS Tightly Coupled Integration
4.1. Dynamic Position Accuracy of Multi-GNSS PPP and PPP/INS Tightly Coupled Integration
4.2. Position Aaccuracy of Multi-GNSS PPP/INS Tightly Coupled Integration Using HVCE Based Adaptive Kalman Filter
4.3. Performance of Velocities and Attitudes
4.4. Multi-GNSS Observation Quality and Residuals
4.5. Impacts of HVCE Based Adaptive Algorithm on The Convergence Performance of Multi-GNSS PPP/INS Tightly Coupled Integration
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cox, D.B. Integration of GPS with inertial navigation systems. Navigation 1978, 25, 236–245. [Google Scholar] [CrossRef]
- Kim, J.; Jee, G.I.; Lee, J.G. A complete GPS/INS integration technique using GPS carrier phase measurements. In Proceedings of the IEEE Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1998; pp. 526–533.
- Godha, S. Performance Evaluation of Low Cost MEMS-Based IMU Integrated with GPS for Land Vehicle Navigation Application; UCGE Report No. 20239; University of Calgary, Department of Geomatics Engineering: Calgary, AB, Canada, 2006. [Google Scholar]
- Chiang, K.W.; Lin, C.A.; Duong, T.T. The performance analysis of the tactical inertial navigator aided by non-GPS derived references. Remote Sens. 2014, 6, 12511–12526. [Google Scholar] [CrossRef]
- Satirapod, C.; Rizos, C.; Wang, J. GPS single point positioning with SA off: How accurate can we get? Surv. Rev. 2001, 36, 255–262. [Google Scholar] [CrossRef]
- Han, S. Carrier Phase-Based Long-Range GPS Kinematic Positioning; University of New South Wales: Sydney, Australia, 1997. [Google Scholar]
- Rizos, C.; Han, S. Reference station network based RTK systems-concepts and progress. Wuhan Univ. J. Nat. Sci. 2003, 8, 566–574. [Google Scholar] [CrossRef]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation; UCGE Report No. 20219; University of Calgary: Calgary, AB, Canada, 2005. [Google Scholar]
- Farrell, J.; Barth, M. The Global Positioning System and Inertial Navigation; McGraw-Hill: New York, NY, USA, 1999. [Google Scholar]
- Chiang, K.W.; Duong, T.T.; Liao, J.K.; Lai, Y.C.; Chang, C.C.; Cai, J.M.; Huang, S.C. On-line smoothing for an integrated navigation system with low-cost MEMS inertial sensors. Sensors 2012, 12, 17372–17389. [Google Scholar] [CrossRef] [PubMed]
- Chiang, K.W.; Duong, T.T.; Liao, J.K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, X. A new method for carrier-phase-based precise point positioning. Navigation 2002, 49, 109–116. [Google Scholar] [CrossRef]
- Azúa, B.M.; DeMets, C.; Masterlark, T. Strong interseismic coupling, fault afterslip, and viscoelastic flow before and after the 9 October 1995 Colima-Jalisco earthquake: Continuous GPS measurements from Colima, Mexico. Geophys. Res. Lett. 2002, 29. [Google Scholar] [CrossRef]
- Bock, H.; Hugentobler, U.; Beutler, G. Kinematic and dynamic determination of trajectories for low earth satellites using GPS. In First CHAMP Mission Results for Gravity, Magnetic and Atmospheric Studies; Springer: Berlin, Germany; Heidelberg, Germany, 2003; pp. 65–69. [Google Scholar]
- Zhang, Y.; Gao, Y. Performance analysis of a tightly coupled kalman filter for the integration of un-differenced GPS and inertial data. In Proceedings of the 2005 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 24–26 January 2005; pp. 270–275.
- Roesler, G.; Martell, H. Tightly coupled processing of precise point position (PPP) and INS data. In Proceedings of the 22nd International Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 1898–1905.
- Du, S. Integration of Precise Point Positioning and Low Cost MEMS IMU. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2010. [Google Scholar]
- Li, B.; Shen, Y. Global navigation satellite system ambiguity resolution with constraints from normal equations. J. Surv. Eng. 2009, 136, 63–71. [Google Scholar] [CrossRef]
- Kleusberg, A.; Teunissen, P.J. GPS for Geodesy; Springer: Berlin, Germany, 1996. [Google Scholar]
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the ground for multi-constellation GNSS science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Jokinen, A.; Feng, S.; Schuster, W.; Ochieng, W.; Hide, C.; Moore, T.; Hill, C. GLONASS aided GPS ambiguity fixed precise point positioning. J. Navig. 2013, 66, 399–416. [Google Scholar] [CrossRef]
- Cai, C.; Liu, Z.; Luo, X. Single-frequency ionosphere-free precise point positioning using combined GPS and GLONASS observations. J. Navig. 2013, 66, 417–434. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering; John Wiley and Sons: New York, NY, USA, 1992. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering for low-cost INS/GPS. J. Navig. 2003, 56, 143–152. [Google Scholar] [CrossRef]
- Almagbile, A.; Wang, J.; Ding, W. Evaluating the performances of adaptive Kalman filter methods in GPS/INS integration. J. Glob. Position. Syst. 2010, 9, 33–40. [Google Scholar] [CrossRef]
- Yang, Y.X.; He, H.B.; Xu, G.C. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Tiberius, C.; Kenselaar, F. Variance component estimation and precise GPS positioning: Case study. J. Surv. Eng. 2003, 129, 11–18. [Google Scholar] [CrossRef]
- Wang, J.G.; Gopaul, N.; Scherzinger, B. Simplified algorithms of variance component estimation for static and kinematic GPS single point positioning. J. Glob. Position. Syst. 2009, 8, 43–52. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, Y.; Wu, M.; Wu, W.; Hu, X.; Shen, L. INS/GPS integration: Global observability analysis. IEEE Trans. Veh. Technol. 2009, 58, 1129–1142. [Google Scholar] [CrossRef]
- Yang, Y.X. Adaptive Navigation and Kinematic Positioning; Surveying and Mapping Publishing: Beijing, China, 2006. [Google Scholar]
- Gao, Z.; Zhang, H.; Ge, M.; Niu, X.; Shen, W.; Wickert, J.; Schuh, H. Tightly coupled integration of ionosphere-constrained precise point positioning and inertial navigation systems. Sensors 2015, 15, 5783–5802. [Google Scholar] [CrossRef] [PubMed]
- Nassar, S. Improving the Inertial Navigation System (INS) Error Model for INS and INS/DGPS Applications. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Niu, X.; Goodall, C.; Nassar, S.; El-Sheimy, N. An efficient method for evaluating the performance of MEMS IMUs. In Proceedings of the Position Location and Navigation Symposium, 2006 IEEE/ION, San Diego, CA, USA, 25–27 April 2006; pp. 766–771.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMU | Grade | Dimensions (mm) | Weight (kg) | Gyro Bias (°/h) | Angular Random Walk °/ |
|---|---|---|---|---|---|
| POS830 | Navigation | 190 × 191 × 183 | 9.0 | 0.005 | 0.002 |
| POS1100 | MEMS | 81.8 × 68 × 70 | 0.5 | 10.0 | 0.33 |
| Items | PPP | PPP/INS | HVCE Adaptive PPP/INS | ||||||
|---|---|---|---|---|---|---|---|---|---|
| North | East | Up | North | East | Up | North | East | Up | |
| G + R (%) | 24.8 | 35.8 | 45.1 | 24.2 | 30.3 | 57.5 | 39.6 | 49.6 | 69.5 |
| G + B (%) | 49.1 | 54.6 | 23.0 | 46.9 | 45.1 | 58.9 | 51.4 | 59.5 | 68.8 |
| G + R + B (%) | 71.6 | 72.7 | 59.3 | 60.4 | 53.7 | 68.7 | 64.3 | 58.7 | 70.6 |
| Items | GPS | G + R | G + B | G + R + B |
|---|---|---|---|---|
| North | +6.4 cm/+29.1% | +4.7 cm/+28.5% | +2.9 cm/+26.1% | +0.1 cm/+0.9% |
| East | +11.6 cm/+42.0% | +6.6 cm/+37.0% | +3.8 cm/+29.9% | +0.1 cm/+1.9% |
| Up | −1.3 cm/−8.5% | +1.3 cm/+15.9% | +4.9 cm/+42.1% | +1.0 cm/+16.5% |
| Items | GPS | G + R | G + B | G + R + B |
|---|---|---|---|---|
| North | +0.0 cm/+0.1% | +2.4 cm/+20.4% | +0.7 cm/+8.6% | +0.6 cm/+10.0% |
| East | −0.6 cm/−3.9% | +2.8 cm/+24.8% | +2.1 cm/+23.3% | +0.5 cm/+ 7.2% |
| Up | +1.4 cm/+8.4% | +2.4 cm/+34.3% | +2.1 cm/+30.5% | +0.7 cm/+16.5% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Z.; Shen, W.; Zhang, H.; Ge, M.; Niu, X. Application of Helmert Variance Component Based Adaptive Kalman Filter in Multi-GNSS PPP/INS Tightly Coupled Integration. Remote Sens. 2016, 8, 553. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070553
Gao Z, Shen W, Zhang H, Ge M, Niu X. Application of Helmert Variance Component Based Adaptive Kalman Filter in Multi-GNSS PPP/INS Tightly Coupled Integration. Remote Sensing. 2016; 8(7):553. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070553
Chicago/Turabian StyleGao, Zhouzheng, Wenbin Shen, Hongping Zhang, Maorong Ge, and Xiaoji Niu. 2016. "Application of Helmert Variance Component Based Adaptive Kalman Filter in Multi-GNSS PPP/INS Tightly Coupled Integration" Remote Sensing 8, no. 7: 553. https://0-doi-org.brum.beds.ac.uk/10.3390/rs8070553