
A Real-Time Detection Algorithm for Sweet Cherry Fruit Maturity Based on YOLOX in the Natural Environment
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
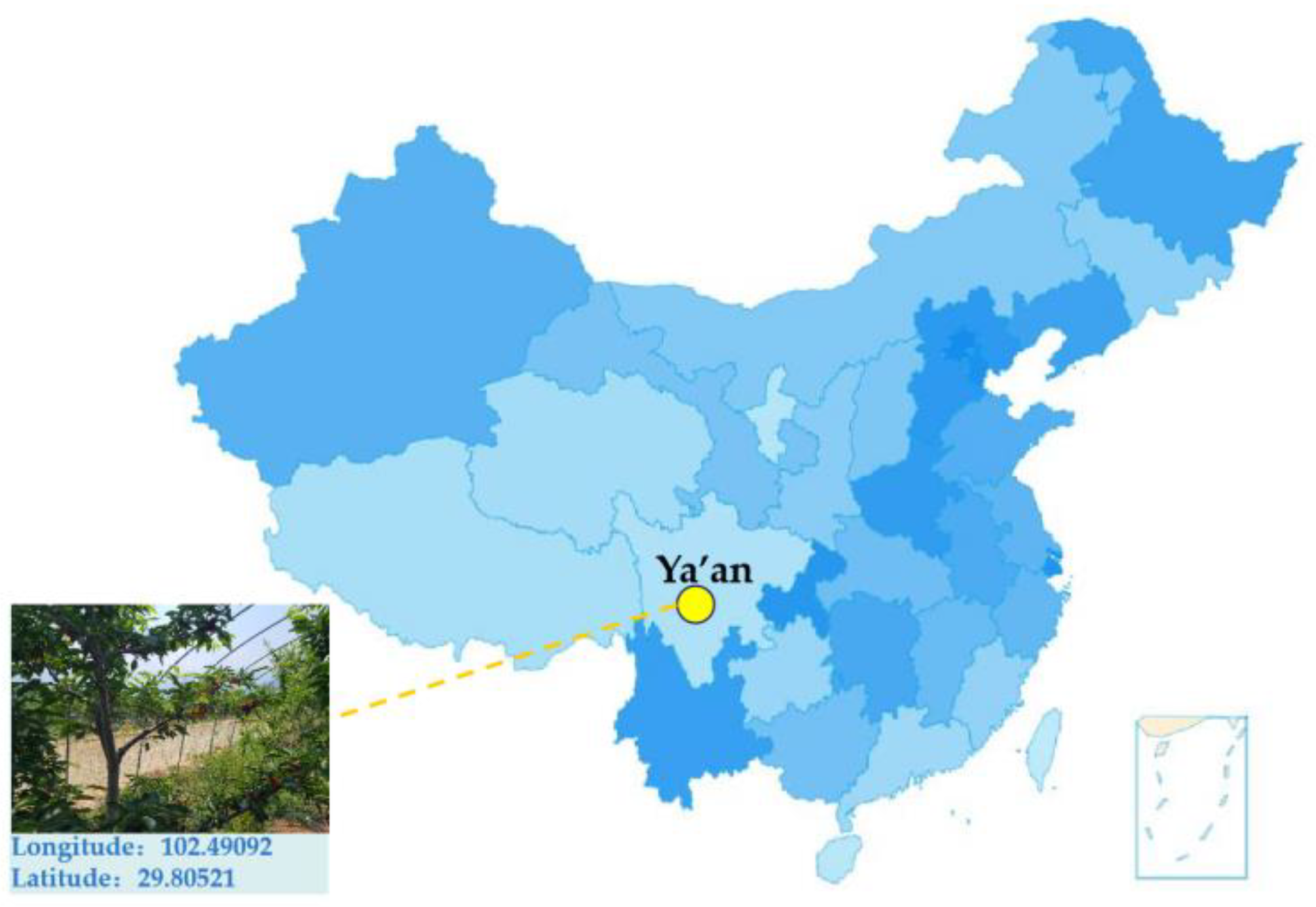
2.1. Study Area and Plant Material
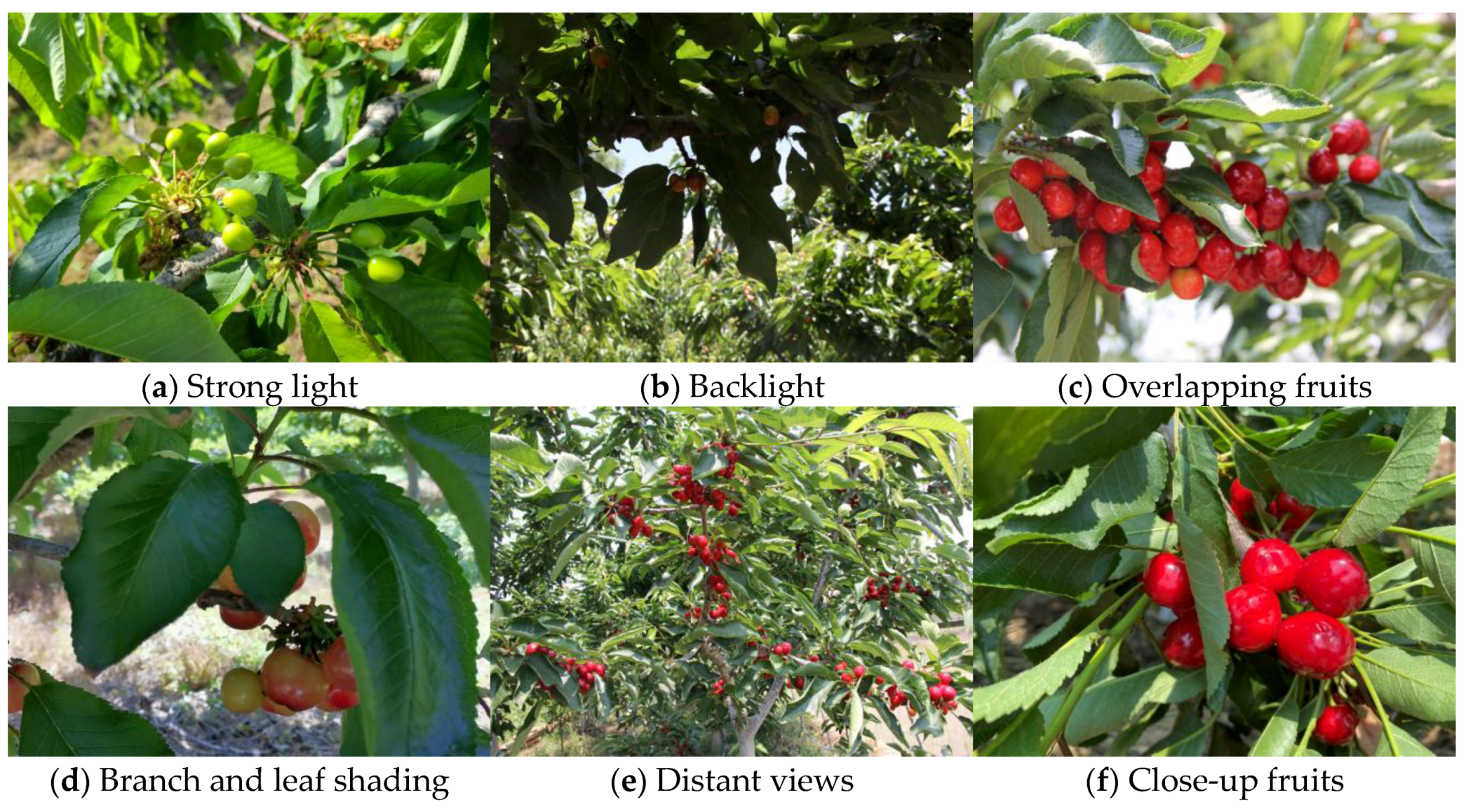
2.2. Image Acquisition and Classification
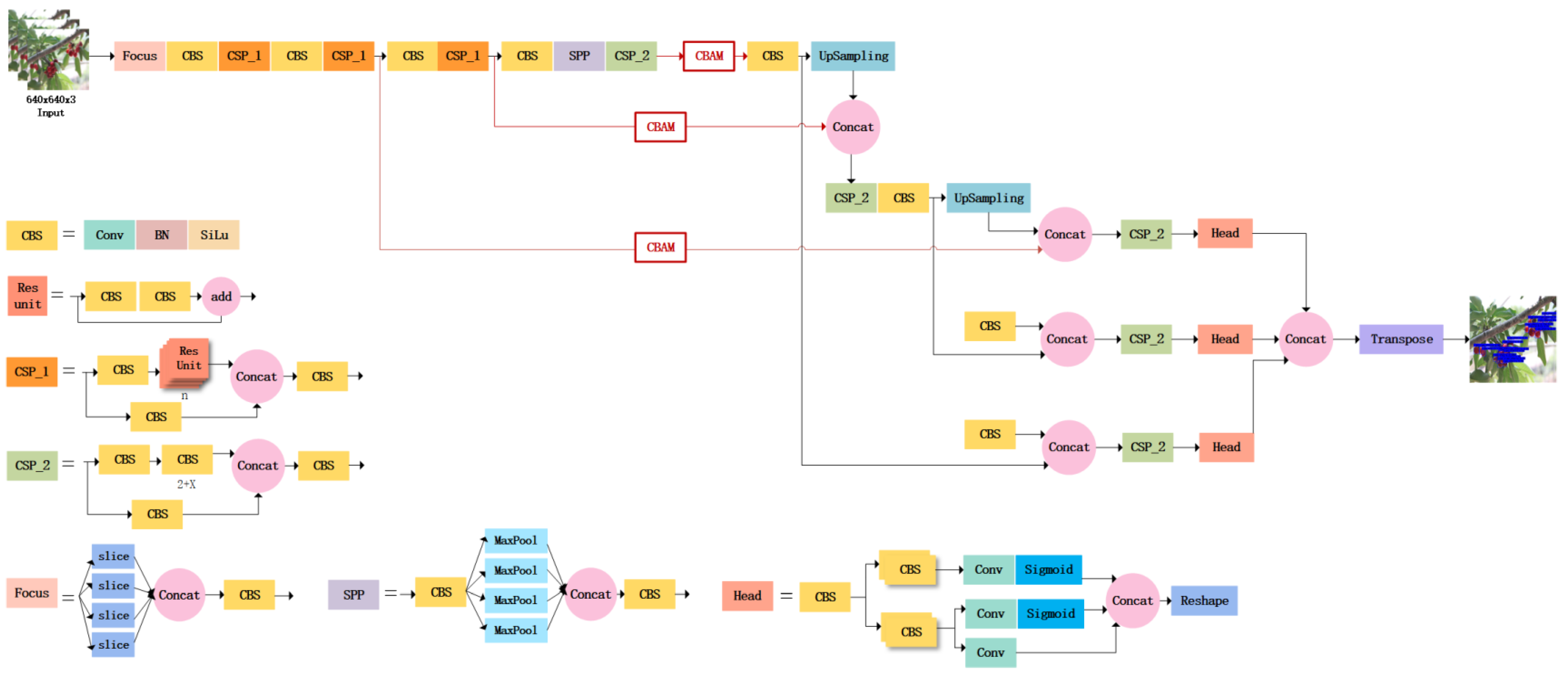
2.3. Improved YOLOX Network
2.3.1. The YOLOX-EIoU-CBAM Network
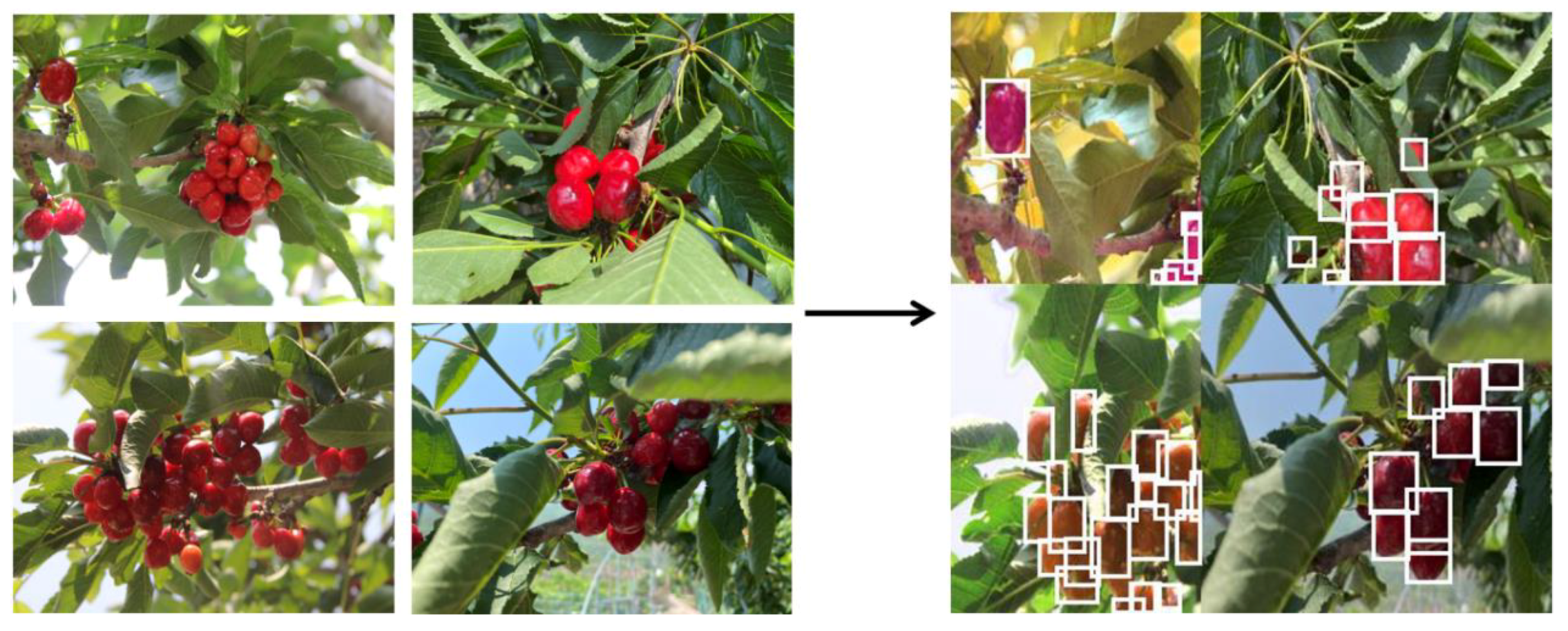
2.3.2. Data Augmentation
- read four random images from the dataset at a time;
- perform operations such as flip (flip the original image left and right), zoom (scale the size of the original image), and gamut change (change the hue, brightness, saturation of the original image), etc.;
- make combinations of pictures and boxes.
2.3.3. The Efficient IoU Loss Function
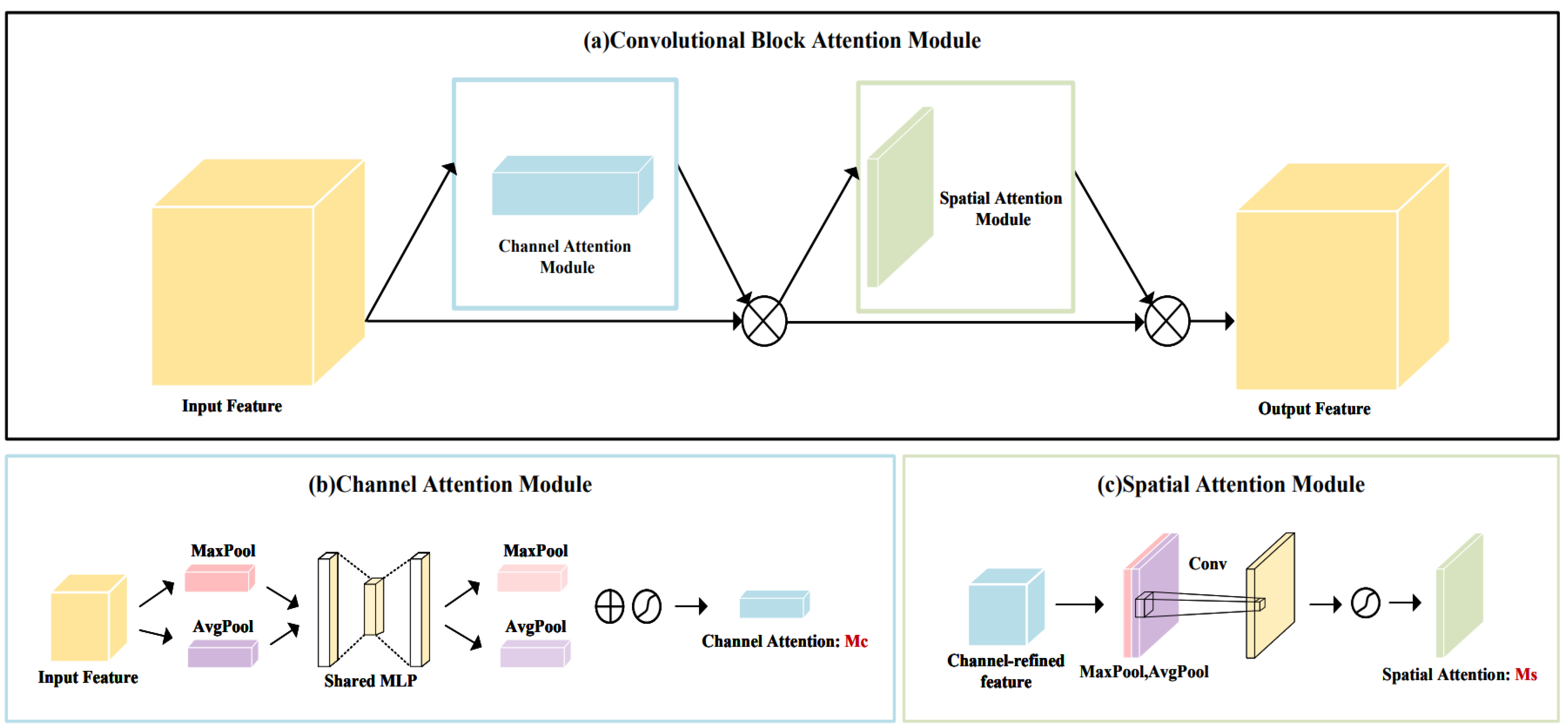
2.3.4. Convolutional Block Attention Module
2.4. Training Environment and Evaluation Indicators
2.4.1. Transfer Learning
2.4.2. Cosine Annealing
2.4.3. Experimental Environment
2.4.4. Evaluation Indicators
3. Results
3.1. Multi-Indicator Performance Evaluation
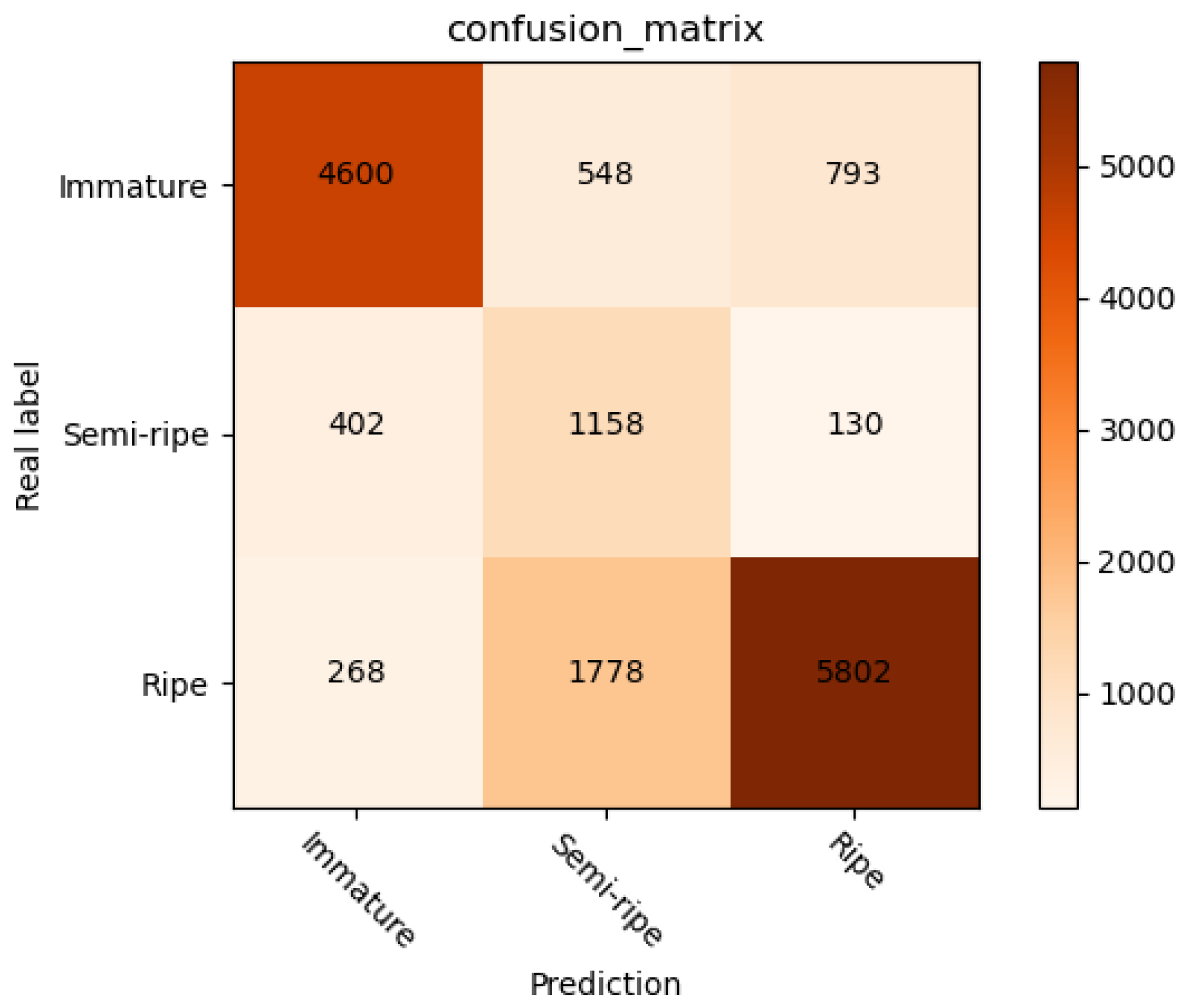
3.2. Performance Evaluation of Different Maturity Categories
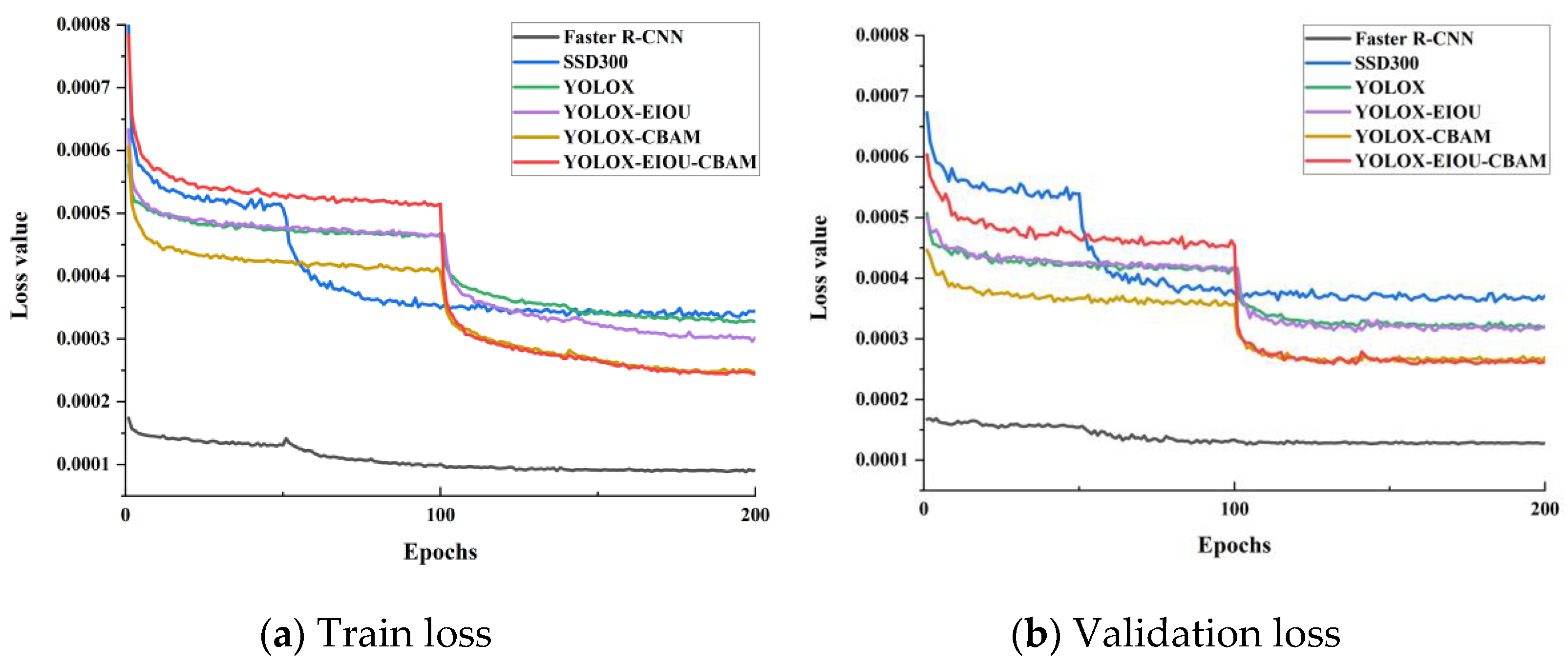
3.3. Loss Function Evaluation
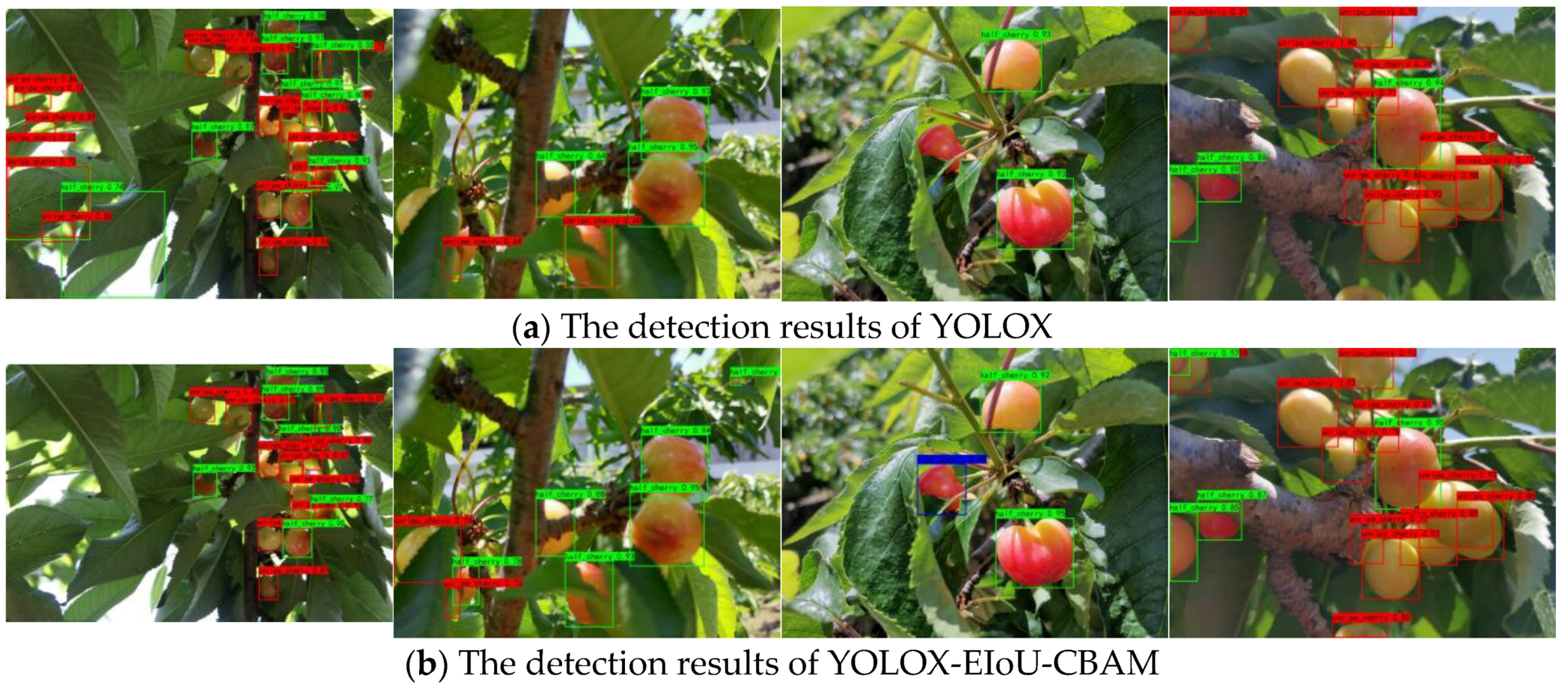
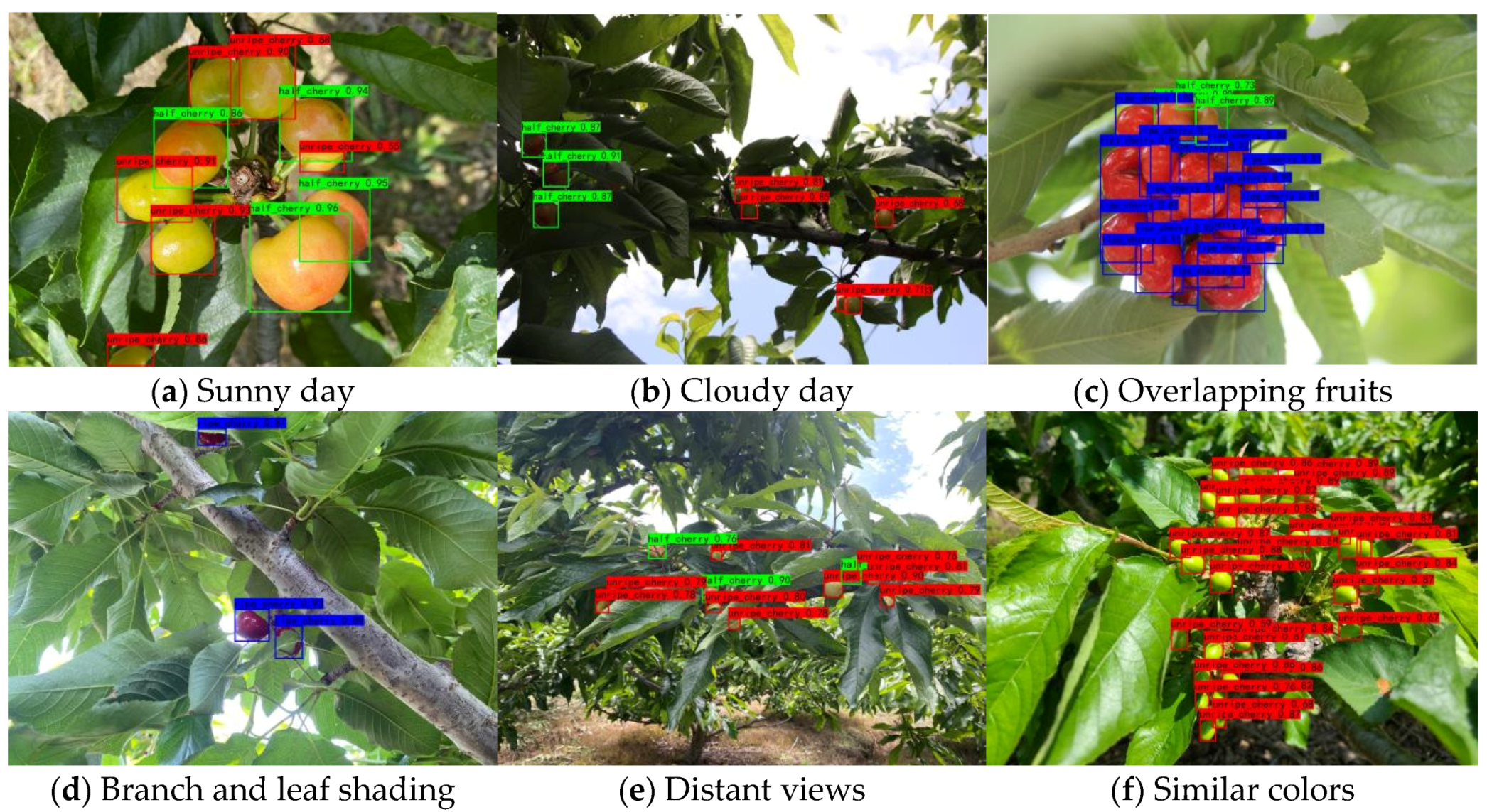
3.4. Image Detection Effect Demonstration
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rabby, M.K.M.; Chowdhury, B.; Kim, J.H. A Modified Canny Edge Detection Algorithm for Fruit Detection Classification. In Proceedings of the ICECE 2018—10th International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 20–22 December 2018; pp. 237–240. [Google Scholar] [CrossRef]
- Lu, J.; Lee, W.S.; Gan, H.; Hu, X. Immature Citrus Fruit Detection Based on Local Binary Pattern Feature and Hierarchical Contour Analysis. Biosyst. Eng. 2018, 171, 78–90. [Google Scholar] [CrossRef]
- Du, L.; Zhang, R.; Wang, X. Overview of Two-Stage Object Detection Algorithms. J. Phys. Conf. Ser. 2020, 1544, 12033. [Google Scholar] [CrossRef]
- Gené-Mola, J.; Vilaplana, V.; Rosell-Polo, J.R.; Morros, J.R.; Ruiz-Hidalgo, J.; Gregorio, E. Multi-Modal Deep Learning for Fuji Apple Detection Using RGB-D Cameras and Their Radiometric Capabilities. Comput. Electron. Agric. 2019, 162, 689–698. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit Detection for Strawberry Harvesting Robot in Non-Structural Environment Based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 42, 386–397. [Google Scholar] [CrossRef] [PubMed]
- Bharati, P.; Pramanik, A. Deep Learning Techniques—R-CNN to Mask R-CNN: A Survey. Adv. Intell. Syst. Comput. 2020, 999, 657–668. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition 2016, Las Vegas, NV, USA, 27–30 December 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017 2016, Honolulu, Hawaii, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar] [CrossRef]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. YOLOX: Exceeding YOLO Series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition 2016, Las Vegas, NV, USA, 27–30 December 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Han, R.; Rao, Y. A New Feature Pyramid Network for Object Detection. In Proceedings of the 2019 International Conference on Virtual Reality and Intelligent Systems, ICVRIS 2019 2019, Jishou, China, 14–15 September 2019; pp. 428–431. [Google Scholar] [CrossRef]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. PANet: Path Aggregation Network for Instance Segmentation. arXiv 2018, arXiv:1803.01534. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.Y.; Mark Liao, H.Y.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A New Backbone That Can Enhance Learning Capability of CNN. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops 2020, Seattle, WA, USA, 16–18 June 2020; pp. 1571–1580. [Google Scholar] [CrossRef]
- Gai, R.; Chen, N.; Yuan, H. A Detection Algorithm for Cherry Fruits Based on the Improved YOLO-v4 Model. Neural Comput. Appl. 2021, 2021, 1–12. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier Nonlinearities Improve Neural Network Acoustic Models. In Proceedings of the ICML Workshop on Deep Learning for Audio, Speech, and Language Processing 2013, Atlanta, GA, USA, 16 June 2013; Volume 28. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Yang, L.; Yan, J.; Li, H.; Cao, X.; Ge, B.; Qi, Z.; Yan, X. Real-Time Classification of Invasive Plant Seeds Based on Improved YOLOv5 with Attention Mechanism. Diversity 2022, 14, 254. [Google Scholar] [CrossRef]
- Gong, H.; Mu, T.; Li, Q.; Dai, H.; Li, C.; He, Z.; Wang, W.; Han, F.; Tuniyazi, A.; Li, H.; et al. Swin-Transformer-Enabled YOLOv5 with Attention Mechanism for Small Object Detection on Satellite Images. Remote Sens. 2022, 14, 861. [Google Scholar] [CrossRef]
- Yu, J.; Jiang, Y.; Wang, Z.; Cao, Z.; Huang, T. UnitBox: An Advanced Object Detection Network. In Proceedings of the MM 2016—2016 ACM Multimedia Conference 2016, Amsterdam, The Netherlands, 15–19 October 2016; pp. 516–520. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Qi, J.; Zhang, J.; Shao, H.; Yang, J.; Li, X. A Real-Time Detection Algorithm for Kiwifruit Defects Based on Yolov5. Electronics 2021, 10, 7274. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression. In Proceedings of the AAAI 2020—34th AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 12993–13000. [Google Scholar] [CrossRef]
- Zhang, Y.F.; Ren, W.; Zhang, Z.; Jia, Z.; Wang, L.; Tan, T. Focal and Efficient IOU Loss for Accurate Bounding Box Regression. Neurocomputing 2022, 506, 146–157. [Google Scholar] [CrossRef]
- Weiss, K.; Khoshgoftaar, T.M.; Wang, D.D. A Survey of Transfer Learning. J. Big Data 2016, 3, 1–40. [Google Scholar] [CrossRef] [Green Version]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Li, K.; Fei-Fei, L. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Loshchilov, I.; Hutter, F. SGDR: Stochastic Gradient Descent with Warm Restarts. In Proceedings of the 5th International Conference on Learning Representations, ICLR 2017—Conference Track Proceedings, Toulon, France, 24–26 April 2017. [Google Scholar] [CrossRef]
- Qian, X.; Lin, S.; Cheng, G.; Yao, X.; Ren, H.; Wang, W. Object Detection in Remote Sensing Images Based on Improved Bounding Box Regression and Multi-Level Features Fusion. Remote Sens. 2020, 12, 143. [Google Scholar] [CrossRef] [Green Version]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition 2019, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Label Name | Number of Pictures | Number of Annotations | Number ofCherries | Growth Cycle | Sample Examples |
|---|---|---|---|---|---|---|
| Immature | unripe_cherry | 800 | 800 | 12979 | late March to mid-April |  |
| Semi-ripe | half_cherry | 800 | 800 | 4395 | mid-April to May |  |
| Ripe | ripe_cherry | 800 | 800 | 18694 | May to June |  |
| Models | mAP (%) | Precision (%) | Recall (%) | F-Score (%) | Model Size (MB) | Inference Time (S) |
|---|---|---|---|---|---|---|
| SSD300 | 39.41 | 86.52 | 26.29 | 31.33 | 100.27 | 1.41 |
| Faster R-CNN | 61.21 | 43.74 | 71.35 | 54.33 | 522.99 | 2.21 |
| YOLOX | 76.98 | 86.50 | 68.70 | 76.33 | 34.10 | 0.59 |
| YOLOX-EIoU | 78.20 | 83.89 | 70.80 | 76.33 | 34.10 | 0.60 |
| YOLOX-CBAM | 79.16 | 84.52 | 71.25 | 77.67 | 34.75 | 0.62 |
| YOLOX-EIoU-CBAM | 81.10 | 84.96 | 73.30 | 78.67 | 34.87 | 0.64 |
| Models | Average Precision (AP) (%) | F-Score (%) | ||||
|---|---|---|---|---|---|---|
| Immature | Semi-Ripe | Ripe | Immature | Semi-Ripe | Ripe | |
| SSD300 | 44.06 | 42.86 | 42.86 | 33 | 40 | 21 |
| Faster R-CNN | 70.21 | 70.21 | 50.71 | 57 | 57 | 49 |
| YOLOX | 81.57 | 71.64 | 77.73 | 81 | 73 | 75 |
| YOLOX-EIoU | 82.25 | 71.46 | 80.89 | 80 | 71 | 78 |
| YOLOX-CBAM | 82.87 | 73.40 | 81.22 | 81 | 73 | 79 |
| YOLOX-EIoU-CBAM | 84.18 | 76.66 | 82.47 | 82 | 74 | 80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Jiang, X.; Shuai, L.; Zhang, B.; Yang, Y.; Mu, J. A Real-Time Detection Algorithm for Sweet Cherry Fruit Maturity Based on YOLOX in the Natural Environment. Agronomy 2022, 12, 2482. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy12102482
Li Z, Jiang X, Shuai L, Zhang B, Yang Y, Mu J. A Real-Time Detection Algorithm for Sweet Cherry Fruit Maturity Based on YOLOX in the Natural Environment. Agronomy. 2022; 12(10):2482. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy12102482
Chicago/Turabian StyleLi, Zhiyong, Xueqin Jiang, Luyu Shuai, Boda Zhang, Yiyu Yang, and Jiong Mu. 2022. "A Real-Time Detection Algorithm for Sweet Cherry Fruit Maturity Based on YOLOX in the Natural Environment" Agronomy 12, no. 10: 2482. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy12102482