
Development of a Method for Evaluating the Technical Condition of a Car’s Hybrid Powertrain

 ,
,
Abstract
:1. Introduction
2. Analysis of the Literature Data and the Problem Statement
3. The Aim and Tasks of the Study
- To scientifically substantiate a new symmetry method for diagnosing the technical state of the HPU on the basis of the system analysis of the task of increasing the environmental cleanliness and efficiency of the vehicle;
- To develop the theoretical foundations of the structural and a parametric identification of a mathematical model of the HPU unit technical state.
4. Theoretical Foundations for Diagnosing the Hybrid Powertrain
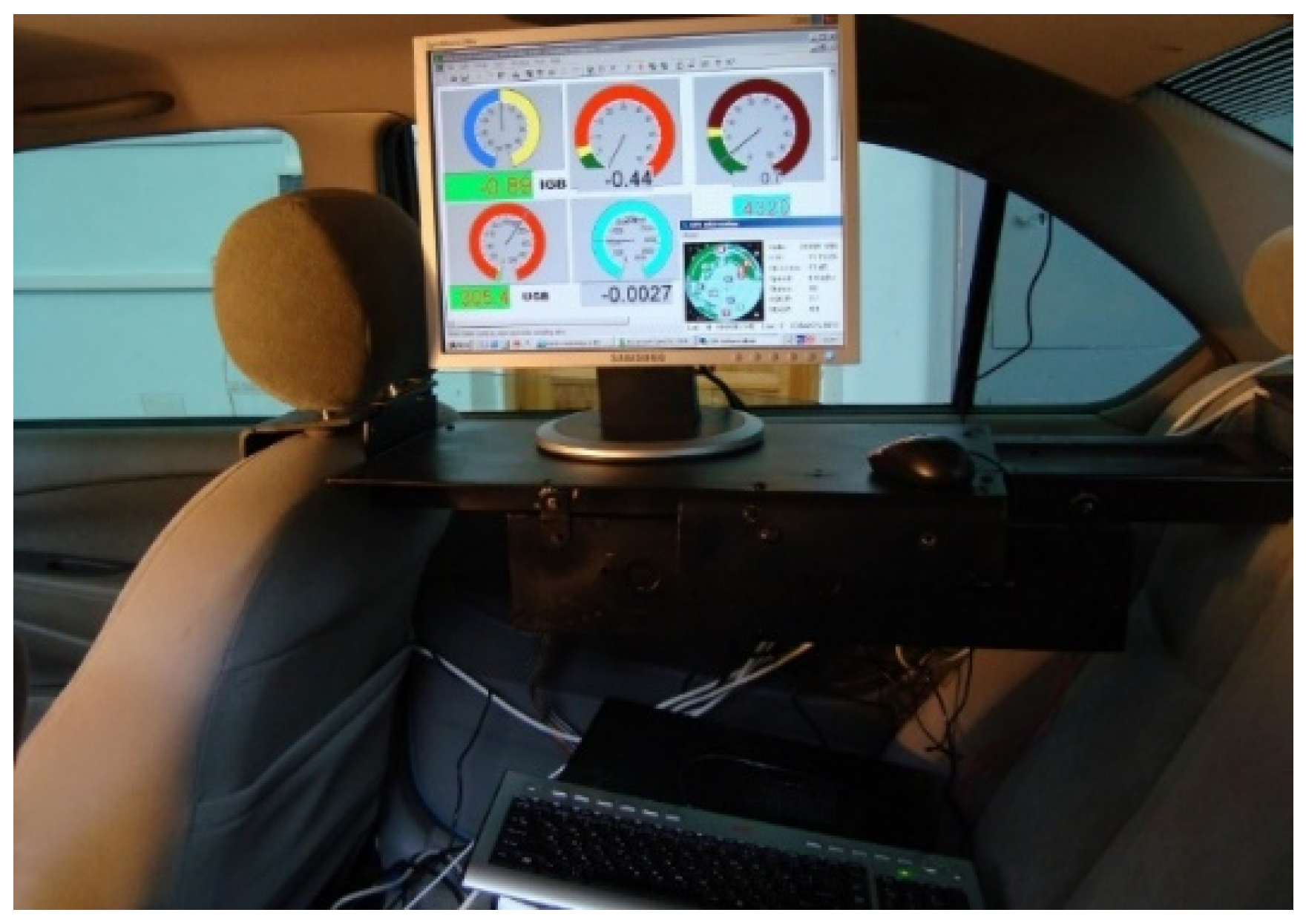
5. Results of the Experimental Studies of a Power Hybrid Unit
- The mode of driving on the electric traction with uniform movement and the charged battery for determining the speed of the vehicle at which the internal combustion engine is turned on, the power of the electric motor when the internal combustion engine is turned on, the power of energy recirculation through the generator. These parameters are necessary to find out the power limit of the internal combustion engine, which is irrational with uniform movement;
- The electric traction mode on a steep ascent. It is necessary to determine the maximum power of the electric motor at which the internal combustion engine is turned on regardless of the speed of movement. This parameter is also required to determine the limits of using the internal combustion engine;
- The mutual operation of the electric motor and the internal combustion engine with the uniform movement. The determination of the synergistic effect of electric powertrains as a percentage depending on the speed of movement and the energy reserve in the battery. The power of the electric motor, the speed of rotation of the crankshaft of the internal combustion engine, the fuel consumption, the speed of movement, the regeneration of the generator’s energy are measured;
- The amount of power used for charging the battery and how it affects the specific fuel consumption;
- The mutual operation of the electric motor and the internal combustion engine with acceleration corresponding to the European urban cycle (up to 1 m·s−2). The determination of the percentage influence of the internal combustion engine and the electric motor on the power indicators of the power unit;
- The mutual operation of the electric motor and the internal combustion engine at maximal acceleration.
6. Generalization of the Method of Diagnostics of the Hybrid Powertrain
7. Discussion of the Results of Diagnostics of the Hybrid Power Unit
8. Conclusions
9. Patents
- Bazhinov O., Kravcov M., Nikitin C. High-security lithium-ion battery: pat 143,615 Ukraine: B60K 1/04 (2019.01) H01M 10/0525 (2010.01), application 02.01.2020; publ. 10.08.2020, Bull. № 15 (In Ukrainian).
- Bazhinov O., Dvadnenko V., Bazhinova T., Kravcov M., Pushkar O. Hybrid car: pat 144,807 Ukraine: B60K 6/24 (2007.10), application 26.05.2020; publ. 26.10.2020, Bull. № 20 (In Ukrainian).
- Bazhinov O., Nikitin C., Kravcov M. Electric vehicle: pat 147,626 Ukraine: B60K 6/00, application 25.01.2021; publ. 26.05.2021, Bull. № 21 (In Ukrainian).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Pk | Actual values of the technical condition coefficient of the HPU (supercriterion) |
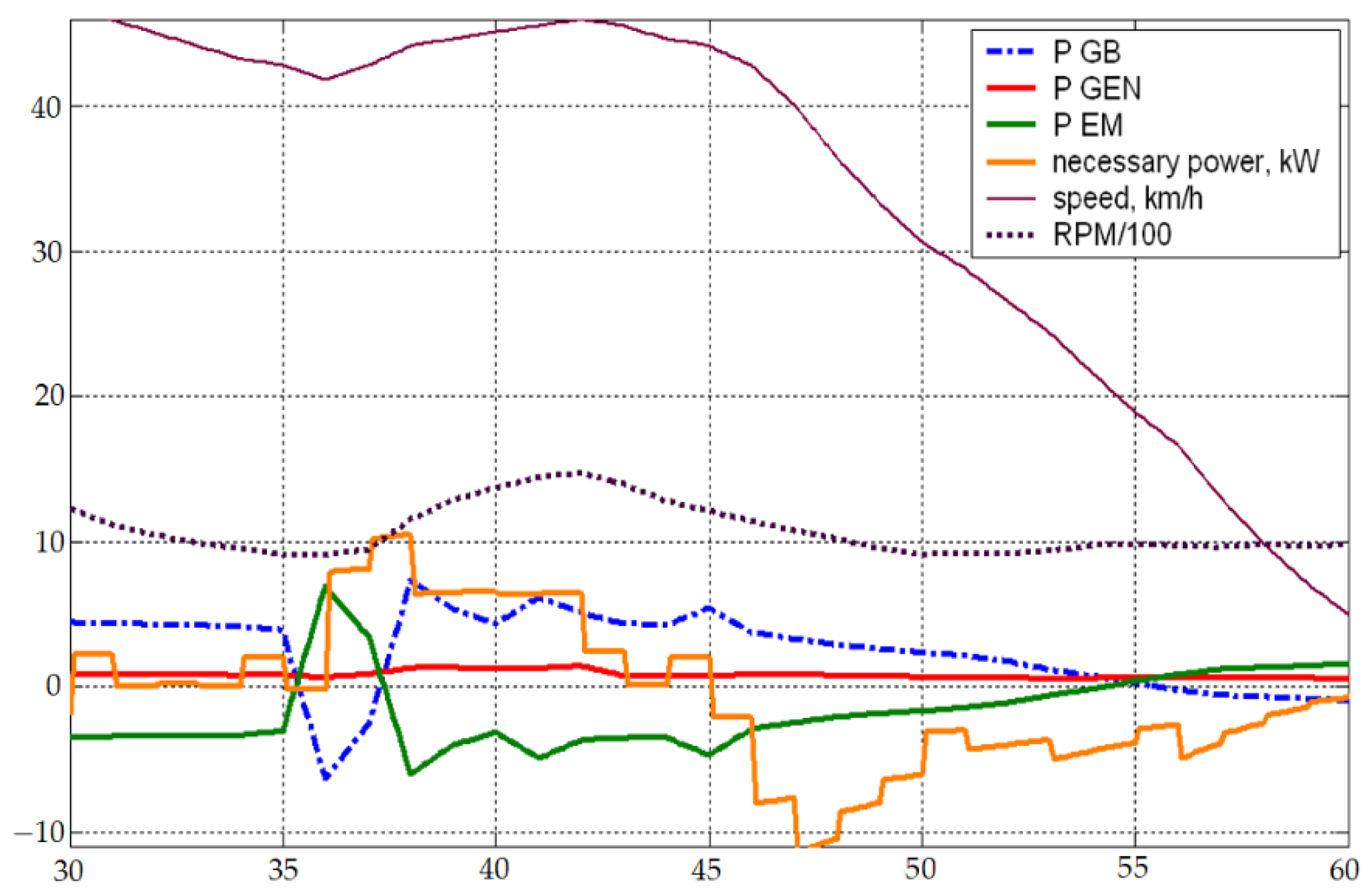
| P GB | Battery power |
| c | Concentration factor |
| B | Constant coefficient of the hybrid power plant, which reflects the design features of the internal combustion engine |
| A | Constant coefficient of the hybrid power plant, which reflects the energy consumption for transport work |
| T(•) | Degree of truth of the corresponding expression |
| ECU | Electronic control unit |
| P EM | Electric motor power |
| ω | Engine crankshaft rotation speed |
| Te | Environment temperature |
| E | Fuel injector capacity |
| P GEN | Generator power |
| HPU | Hybrid powertrain |
| ICE | Internal combustion engine |
| ti | Injection time of the fuel injector |
| MPk | Mathematical expectation |
| b | Maximum coordinate |
| x | Measured parameter value |
| μ(u) | Membership function |
| D | Mean square of the modelling error for the normalized values of the technical condition coefficient of the HPU |
| min {x}, max {x} | Minimum and maximum values of the corresponding set of parameter values, respectively |
| Qmin | Minimum fuel consumption per 100 km of mileage |
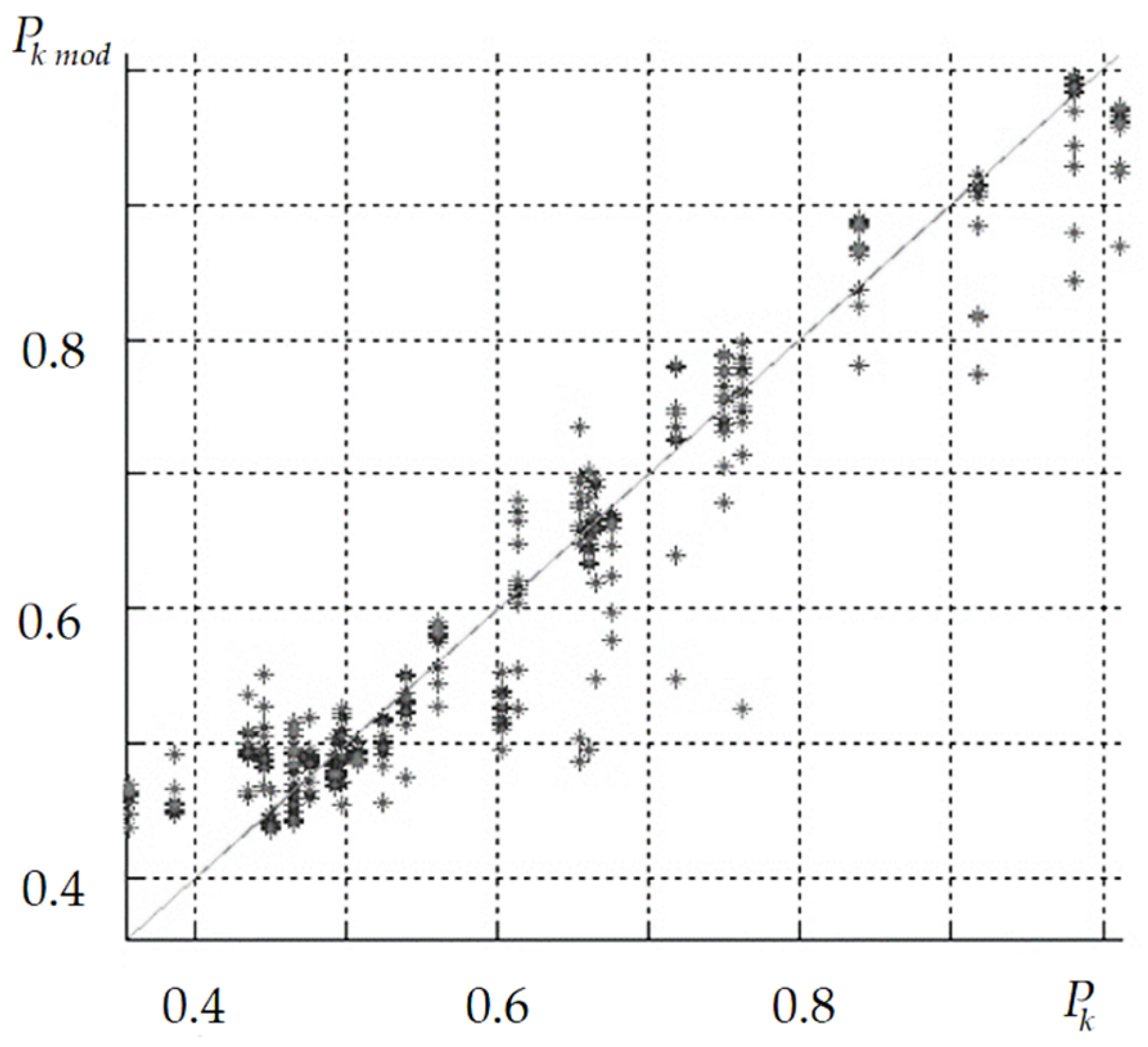
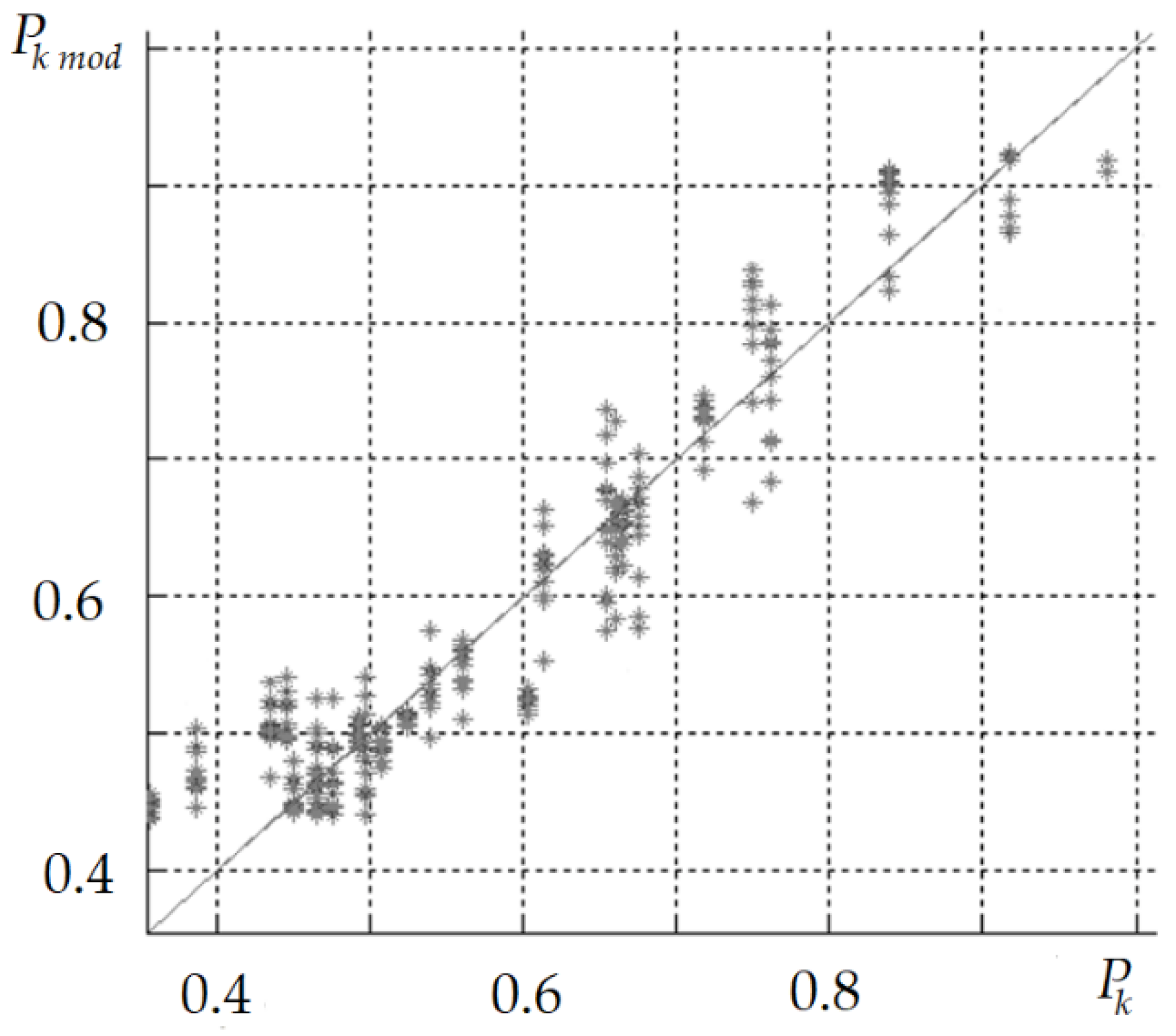
| Pk mod | Modal Pk values of the technical condition coefficient of the HPU |
| Normalized parameter value of I, U, ω, Te, Pkmod, x, A | |
| u | Normalized value of the corresponding variable |
| Xc | Number of ICE cylinders |
| n | Number of points in the control sample |
| Cnom | Nominal battery capacity |
| MPk%, σPk% | Relative values of the mathematical expectation and standard deviation |
| M | Scale “average” |
| B | Scale “large” |
| LM | Scale “less than average” |
| MB | Scale “more than average” |
| L | Scale “small” |
| M, L, B | Scales of rules and parameters of membership functions of fuzzy terms (according to the theory of fuzzy sets) |
| ge | Specific fuel consumption |
| σPk | Standard deviation |
| Vmax, Vc | The highest speed of the car and speed of the car at the time of diagnosis, respectively |
| TB | Traction battery |
| I | Traction battery current |
| U | Traction battery voltage |
| RPM/100 | Turnover crankshaft of ICE/100 |
References
- Reif, K.; Noreikat, K.E.; Borgeest, K. Kraftfahrzeug-Hybridantriebe: Grundlagen, Komponenten, Systeme, Anwendungen; Springer: Wiesbaden, Germany, 2012; 354p. [Google Scholar]
- Dizo, J.; Blatnicky, M. Investigation of ride properties of a three-wheeled electric vehicle in terms of driving safety. In Proceedings of the 13th International Scientific Conference on Sustainable, Modern and Safe Transport TRANSCOM 2019, Novy Smokovec, Slovakia, 29–31 May 2019; Bujnak, J., Guagliano, M., Eds.; Elsevier Science: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Dižo, J.; Blatnický, M.; Semenov, S.; Mikhailov, E.; Kostrzewski, M.; Drozdziel, P.; Šťastniak, P. Electric and plug-in hybrid vehicles and their infrastructure in a particular European region. In Proceedings of the 14th International Scientific Conference on Sustainable, Modern and Safe Transport TRANSCOM 2021, Novy Smokovec, Slovakia, 26–28 May 2021; Bujnak, J., Guagliano, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Dizo, J.; Blatnicky, M. Evaluation of vibrational properties of a three-wheeled vehicle in terms of comfort. Manuf. Technol. 2019, 19, 197–203. [Google Scholar] [CrossRef]
- Korohodskyi, V.; Kryshtopa, S.; Migal, V.; Rogovyi, A.; Polivyanchuk, A.; Slyn’ko, G.; Manoyio, V.; Vasylenko, O.; Osetrov, O. Determining the characteristics for the rational adjusting of an fuel-air mixture composition in a two-stroke engine with internal mixture formation. East.-Eur. J. Enterp. Technol. 2020, 5, 39–52. [Google Scholar]
- Shuliak, M.; Klets, D.; Kalinin, Y.; Kholodov, A. Selecting a Rational Operation Mode of Mobile Powertrain Using Measuring and Control Complex. In Proceedings of the 15th International Conference on ICT in Education, Research and Industrial Applications, Kherson, Ukraine, 12–15 June 2019; Volume 2387, pp. 141–151. [Google Scholar]
- Podrigalo, M.; Bogomolov, V.; Kholodov, M.; Koryak, A.; Turenko, A.; Kaidalov, R.; Verbitskiy, V.; Nikorchuk, A.; Volodarets, M.; Kudimov, S.; et al. Energy Efficiency of Vehicles with Combined Electromechanical Drive of Driving Wheels. In Proceedings of the SAE 2020 International Powertrains, Fuels and Lubricants Meeting, PFL 2020, Virtual, Online, 22–24 September 2020. Code 163701. [Google Scholar]
- Kalinin, Y.; Klets, D.; Shuliak, M.; Kholodov, A. Information System for Controlling Transport-Technological Unit with Variable Mass. In Proceedings of the 16th International Conference on ICT in Education, Research and Industrial Applications, Kharkiv, Ukraine, 6–10 October 2020; Volume 2732, pp. 303–312. [Google Scholar]
- Chernukha, A.; Teslenko, A.; Kovaliov, P.; Bezuglov, O. Mathematical Modeling of Fire-Proof Efficiency of Coatings Based on Silicate Composition. Mater. Sci. Forum 2020, 1006, 70–75. [Google Scholar] [CrossRef]
- Vambol, S.; Vambol, V.; Kondratenko, O.; Koloskov, V.; Suchikova, Y. Substantiation of expedience of application of high-temperature utilization of used tires for liquefied methane production. J. Achiev. Mater. Manuf. Eng. 2018, 87, 77–84. [Google Scholar] [CrossRef]
- Sytnik, N.; Kunitsa, E.; Mazaeva, V.; Chernukha, A.; Kovalov, P.; Grigorenko, N.; Gornostal, S.; Yermakova, O.; Pavlunko, M.; Kravtsov, M. Rational parameters of waxes obtaining from oil winterization waste. East.-Eur. J. Enterp. Technol. 2020, 6, 29–35. [Google Scholar] [CrossRef]
- Kovaliova, O.; Pivovarov, O.; Kalyna, V.; Tchursinov, Y.; Kunitsa, E.; Chernukha, A.; Polkovnychenko, D.; Grigorenko, N.; Kurska, T.; Yermakova, O. Implementation of the plasmochemical activation of technological solutions in the process of ecologization of malt production. East.-Eur. J. Enterp. Technol. 2020, 5, 26–35. [Google Scholar] [CrossRef]
- Popov, O.; Iatsyshyn, A.; Kovach, V.; Artemchuk, V.; Taraduda, D.; Sobyna, V.; Sokolov, D.; Dement, M.; Yatsyshyn, T. Conceptual approaches for development of informational and analytical expert system for assessing the NPP impact on the environment. Nucl. Radiat. Saf. 2018, 3, 56–65. [Google Scholar] [CrossRef]
- Vambol, S.; Vambol, V.; Sobyna, V.; Koloskov, V.; Poberezhna, L. Investigation of the energy efficiency of waste utilization technology, with considering the use of low-temperature separation of the resulting gas mixtures. Energetika 2018, 64, 186–195. [Google Scholar] [CrossRef]
- Levterov, A.A.; Levterov, A.M. Thermodynamic properties of fatty acid esters in some biodiesel fuels. Funct. Mater. 2018, 25, 308–313. [Google Scholar] [CrossRef]
- Crisostomi, E.; Shorten, R.; Stüdli, S.; Wirth, F. Electric and Plug-In Hybrid Vehicle Networks: Optimization and Control; CRC Press: London, UK; New York, NY, USA, 2017; 242p. [Google Scholar]
- Dubinin, D.; Avetisyan, V.; Ostapov, K.; Shevchenko, S.; Hovalenkov, S.; Beliuchenko, D.; Maksymov, A.; Cherkashyn, O. Investigation of the effect of carbon monoxide on people in case of fire in a building. Sigurnost 2020, 62, 347–357. [Google Scholar] [CrossRef]
- Bazhynova, T.; Kravchenko, O.; Barta, D.; Haievyi, O.; Pavelcik, V. Neural Network Model of Assessing the Technical Condition of the Power Unit of a Hybrid Vehicle. In Proceedings of the 12th International Science-Technical Conference AUTOMOTIVE SAFETY 2020, Kielce, Poland, 21–23 October 2020; pp. 1–7. [Google Scholar]
- Rakov, V. Operation and Maintenance of Vehicles with Hybrid Power Units. Monograph; Vologda State University: Vologda, Russia, 2014; 143p. [Google Scholar]
- Bazhinov, O.; Zaverukha, R.; Bazhynova, T. Information complex system of diagnostics of hybrid and electric cars. Sci. J. Environ. Eng. 2020, 2, 12–18. [Google Scholar]
- Kiseleva, E.; Kaminskiy, N.; Presnykov, V. Study of Fuel Efficiency of Hybrid Vehicles. IOP Conf. Ser. Earth Environ. Sci. 2020, 459, 022086. [Google Scholar] [CrossRef]
- Wang, Y.; Hao, C.; Ge, Y.; Hao, L.; Tan, J.; Wang, X.; Zhang, P.; Wang, Y.; Tian, W.; Lin, Z.; et al. Fuel consumption and emission performance from light-duty conventional/hybrid-electric vehicles over different cycles and real driving tests. Fuel 2020, 278, 118340. [Google Scholar] [CrossRef]
- Ou, X.; Xiaoyu, Y.; Zhang, X. Using coal for transportation in China: Life GHG of coal-based fuel and electric vehicle, and policy implications. Int. J. Greenh. Gas Control. 2010, 4, 878–887. [Google Scholar] [CrossRef]
- Ou, X.; Xiaoyu, Z.; Shiyan, C. Scenario analyses on alternative fuel/vehicle for China’s future road transport: Life-cycle energy demand and GHG emissions. Energy Policy 2010, 38, 3943–3956. [Google Scholar] [CrossRef]
- Karden, E.; Ploumen, S.; Fricke, B.; Miller, T.; Snyder, K. Energy storage devices for future hybrid electric vehicles. J. Power Sources 2007, 168, 2–11. [Google Scholar] [CrossRef]
- Sapienza, C.; Andaloro, L.; Matera, F.V.; Dispenza, G.; Cretl, P.; Ferraro, M.; Antonucci, V. Batteries analysis for FC-hybrid powertrain optimization. Int. J. Hydrog. Energy 2008, 33, 3230–3234. [Google Scholar] [CrossRef]
- Serikov, S. Neural network control of a hybrid power unit based on the method of adaptive criticism. J. Automob. Transp. 2012, 30, 65–74. [Google Scholar]
- Kulikov, I. Dynamic programming as a tool for theoretical research of the power unit of a hybrid car. J. Automot. Eng. 2010, 4, 5. [Google Scholar]
- Borodenko, Y.; Cherevach, A. Diagnostic concept for electric drive of a hybrid vehicle. J. Automot. Transp. 2012, 30, 59–63. [Google Scholar]
- Zhou, Q.; Zhao, D.; Shuai, B.; Li, Y.; Williams, H.; Xu, H. Knowledge implementation and transfer with an adaptive learning network for real-time power management of the plug-in hybrid vehicle. Inst. Electr. Electron. Eng. Trans. Neural Netw. Learn. Syst. 2021, 32, 5298–5308. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Li, Y.; Zhao, D.; Li, J.; Williams, H.; Xu, H.; Yan, F. Transferable representation modelling for real-time energy management of the plug-in hybrid vehicle based on k-fold fuzzy learning and Gaussian process regression. Appl. Energy 2022, 305, 117853. [Google Scholar] [CrossRef]
- Chindamo, D.; Economou, J.T.; Gadola, M.; Knowles, K. A neurofuzzy-controlled power management strategy for a series hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1034–1050. [Google Scholar] [CrossRef]
- Shabanov, A.; Lomakin, V.; Shabanov, A.; Salnikov, V. The use of combined power units in cars and environmental safety of the environment. Sci. J. Izv. MGTU MAMI 2013, 1, 232–239. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ω | L | LM | M | MB | B | ||||||||||||
| I | Te | L | M | B | L | M | B | L | M | B | L | M | B | L | M | B | |
| U | |||||||||||||||||
| B | B | B | B | B | B | B | B | MB | B | B | MB | MB | B | M | MB | B | |
| M | B | B | B | MB | B | B | MB | B | B | MB | MB | B | M | MB | B | ||
| L | B | B | B | MB | B | B | MB | MB | B | MB | MB | B | M | MB | MB | ||
| MB | B | MB | B | B | MB | MB | B | MB | MB | B | M | MB | MB | M | MB | MB | |
| M | MB | MB | B | M | MB | B | M | MB | MB | M | MB | MB | M | M | MB | ||
| L | MB | MB | B | M | MB | MB | M | M | MB | M | M | MB | LM | M | MB | ||
| M | B | M | MB | MB | M | M | MB | M | M | MB | M | M | MB | LM | M | M | |
| M | M | MB | MB | M | M | MB | M | M | MB | M | M | MB | LM | LM | M | ||
| L | M | M | MB | M | M | MB | M | M | MB | LM | M | M | LM | LM | M | ||
| LM | B | LM | M | MB | LM | M | M | LM | M | M | LM | LM | M | LM | LM | LM | |
| M | LM | M | M | LM | LM | M | LM | LM | M | LM | LM | M | L | LM | LM | ||
| L | LM | LM | M | LM | LM | M | LM | LM | M | L | LM | LM | L | L | LM | ||
| L | B | LM | LM | M | L | LM | M | L | LM | LM | L | L | LM | L | L | L | |
| M | L | LM | M | L | LM | M | L | L | LM | L | L | LM | L | L | L | ||
| L | L | LM | M | L | LM | LM | L | L | LM | L | L | L | L | L | L | ||
| Methods | Training Subset | Control Subset | |||||||
|---|---|---|---|---|---|---|---|---|---|
| MPk | MPk%, % | σPk | σPk%,% | MPk | MPk%, % | σPk | σPk%,% | ||
| Model Mamdani | Before settings | 0.937 | 1.43 | 0.209 | 13.2 | 0.89 | 2.42 | 0.714 | 32.75 |
| After settings | 0.76 | 0.27 | 0.65 | 7.26 | 0.482 | 0.74 | 0.63 | 8.78 | |
| Neural network | 0.03 | 0.004 | 0.42 | 4.05 | 0.463 | 0.71 | 0.50 | 5.41 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bazhinov, O.; Gerlici, J.; Kravchenko, O.; Haiek, Y.; Bazhynova, T.; Zaverukha, R.; Kravchenko, K. Development of a Method for Evaluating the Technical Condition of a Car’s Hybrid Powertrain. Symmetry 2021, 13, 2356. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122356
Bazhinov O, Gerlici J, Kravchenko O, Haiek Y, Bazhynova T, Zaverukha R, Kravchenko K. Development of a Method for Evaluating the Technical Condition of a Car’s Hybrid Powertrain. Symmetry. 2021; 13(12):2356. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122356
Chicago/Turabian StyleBazhinov, Oleksiy, Juraj Gerlici, Oleksandr Kravchenko, Yevhen Haiek, Tetiana Bazhynova, Ruslan Zaverukha, and Kateryna Kravchenko. 2021. "Development of a Method for Evaluating the Technical Condition of a Car’s Hybrid Powertrain" Symmetry 13, no. 12: 2356. https://0-doi-org.brum.beds.ac.uk/10.3390/sym13122356