

Predictive Analytics-Based Methodology Supported by Wireless Monitoring for the Prognosis of Roller-Bearing Failure



Abstract
:1. Introduction
2. Materials and Methods
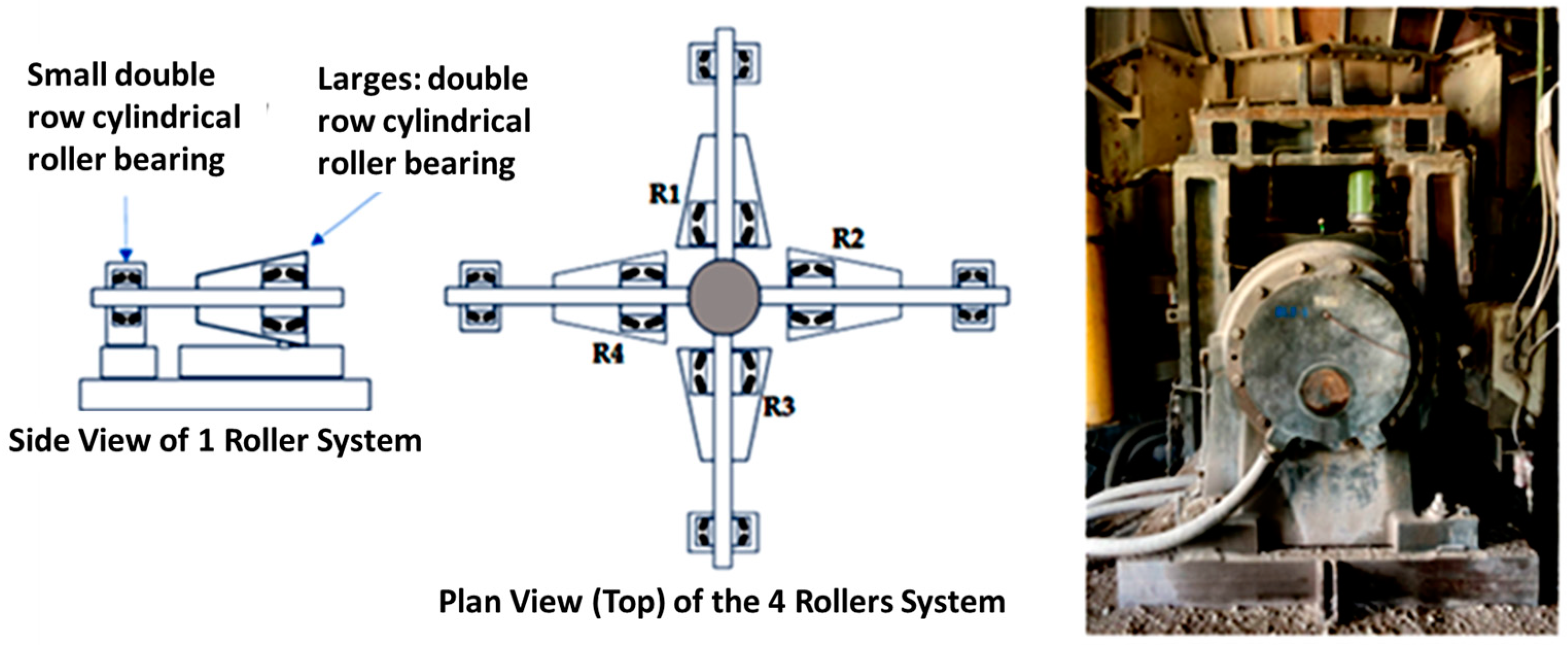
2.1. Geometrical Dimensions, Set-Up, and Process Parameters
- Four rollers were analyzed, classified as R1, R2, R3, and R4.
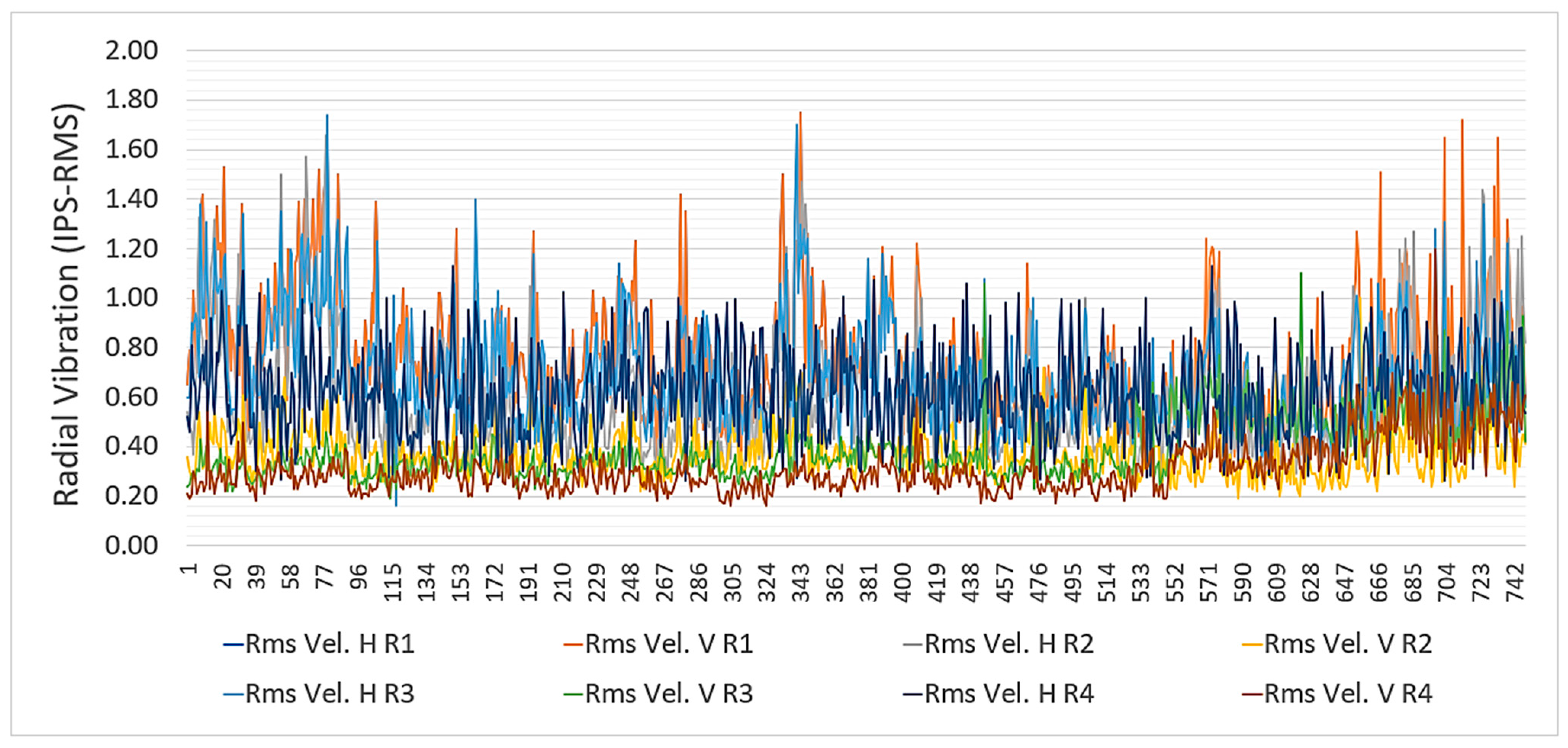
- Vibrations were measured in RMS velocity (IPS) and acceleration (g’s).
- Vibrations were captured in the radial horizontal (H) and vertical (V) directions.
- Data were captured every 5 min with Spectrums and Waveforms.
- The capture period was 25 June to 25 October of 2021 (Timeframe).
2.2. Data Modeling
- A descriptive statistical examination of time series data;
- The inspection of extreme values.
- Model identification;
- Model fitting;
- Model diagnostics.
2.3. Predictive Models
2.3.1. ARIMA
- Is good for short-term forecasting;
- Only needs historical data;
- Models non-stationary data.
- -
- Xt is the time series value at time t;
- -
- a1, …, ap are the parameters of the autoregressive part of the model;
- -
- et is the error term at time t;
- -
- b1, …, bk are the parameters of the moving average part of the model.
2.3.2. Holt–Winters
- = the forecast equation;
- at = the level component;
- bt = the trend component;
- st = the seasonal component;
- p = the length of the seasonal period;
- h = the number of periods ahead for forecasting.
2.3.3. Models Comparison
- ai = predicted values;
- ci = observed values;
- n = number of observations.
3. Results and Discussion
3.1. Data Collection and Analysis
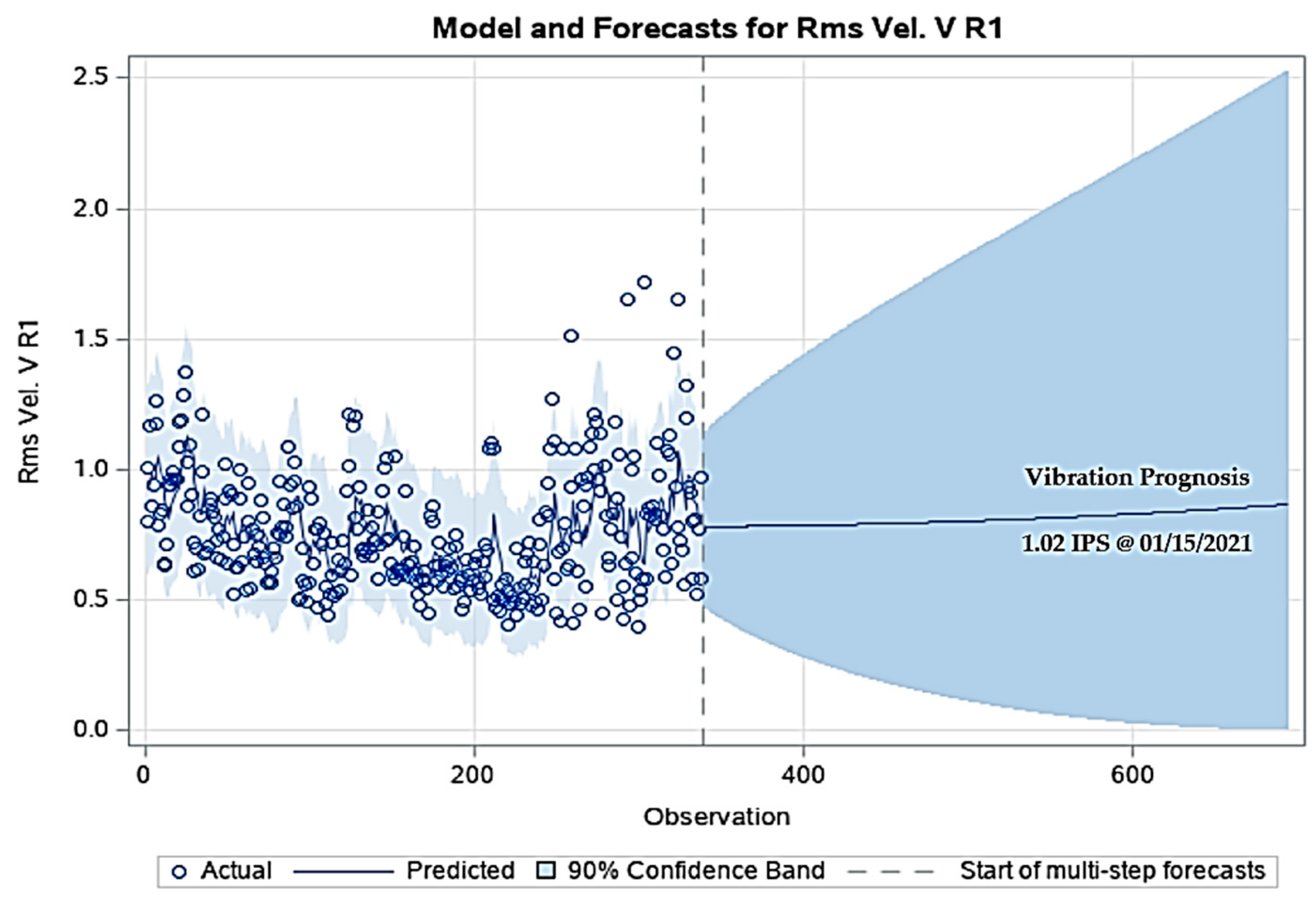
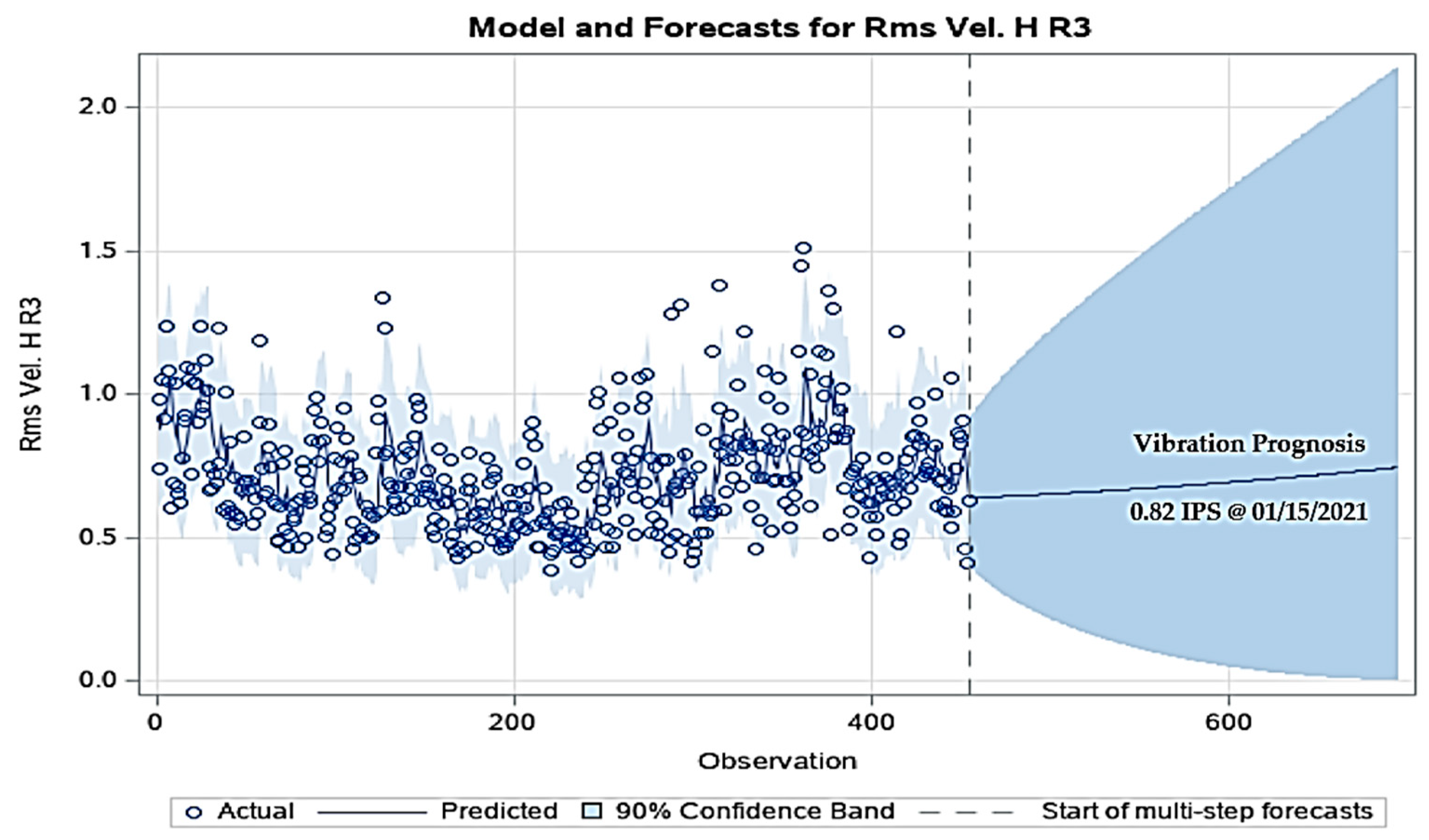
3.2. ARIMA Model Application
3.3. Holt–Winters Model Application
3.4. Model Comparison and Prognosis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIC | Akaike Information Criterion |
| AICc | Corrected Akaike Information Criterion |
| ARIMA | Auto-Regressive Integrated Moving Average |
| CRISP-DM | Cross-Industry Standard Process for Data Mining |
| DDMs | Data-Driven Models |
| DF | Dickey–Fuller |
| HI | Health Indicator |
| MAE | Mean Absolute Error |
| MAPE | Mean Absolute Percentage Error |
| ME | Mean Error |
| PACF | Partial Auto Correlation Function |
| PHM | Prognosis and Health Monitoring |
| RMS | Root Mean Square |
| RMSE | Root Mean Square Error |
| RUL | Remaining Useful Life |
| SAS | Statistical Analysis System |
| SEMMA | Sample, Explore, Modify, Model, and Assess |
| SPSS | Statistical Package for the Social Sciences |
| SVM | Support Vector Machine |
References
- Chapman, P.; Clinton, J.; Kerber, R.; Khabaza, T.; Reinartz, T.; Shearer, C.; Wirth, R. CRISP-DM Step-by-Step Data Mining Guide; SPSS: Chicago, IL, USA, 2000. [Google Scholar]
- Soualhi, A.; Lamraoui, M.; Elyousfi, B.; Razik, H. PHM SURVEY: Implementation of Prognostic Methods for Monitoring Industrial Systems. Energies 2022, 15, 6909. [Google Scholar] [CrossRef]
- Zio, E. Reliability engineering: Old problems and new challenges. Reliab. Eng. Syst. Saf. 2009, 94, 125–141. [Google Scholar] [CrossRef]
- Chen, B.; Chen, Z.; Chen, F.; Xiao, W.; Xiao, N.; Fu, W.; Li, G. Reliability Assessment Method Based on Condition Information by Using Improved Proportional Covariate Model. Machines 2022, 10, 337. [Google Scholar] [CrossRef]
- Ghodrati, B.; Hoseinie, S.H.; Kumar, U. Context-driven mean residual life estimation of mining machinery. Int. J. Min. Reclam. Environ. 2018, 32, 486–494. [Google Scholar] [CrossRef]
- Press, G. Cleaning Big Data: Most Time-Consuming, Least Enjoyable Data Science Task, Survey Says; Forbes Publications: Charleston, SC, USA, 2016; Available online: https://www.forbes.com/sites/gilpress/2016/03/23/data-preparation-most-time-consuming-least-enjoyable-data-science-task-survey-says/ (accessed on 8 August 2023).
- Ye, Z.; Zhang, Q.; Shao, S.; Niu, T.; Zhao, Y. Rolling Bearing Health Indicator Extraction and RUL Prediction Based on Multi-Scale Convolutional Autoencoder. Appl. Sci. 2022, 12, 5747. [Google Scholar] [CrossRef]
- Desnica, E.; Ašonja, A.; Radovanović, L.; Palinkaš, I.; Kiss, I. Selection, Dimensioning and Maintenance of Roller Bearings. In Lecture Notes in Networks and Systems, Proceedings of the 31st International Conference on Organization and Technology of Maintenance (OTO 2022), Osijek, Croatia, 12 December 2022; Blažević, D., Ademović, N., Barić, T., Cumin, J., Desnica, E., Eds.; Springer: Cham, Switzerland, 2023; Volume 592. [Google Scholar] [CrossRef]
- Manjurul Islam, M.M.; Kim, J.-M. Reliable multiple combined fault diagnosis of bearings using heterogeneous feature models and multiclass support vector Machines. Reliab. Eng. Syst. Saf. 2019, 184, 55–66. [Google Scholar] [CrossRef]
- Peng, B.; Bi, Y.; Xue, B.; Zhang, M.; Wan, S. A Survey on Fault Diagnosis of Rolling Bearings. Algorithms 2022, 15, 347. [Google Scholar] [CrossRef]
- Ejaz, N.; Salam, I.; Tauqir, A. Failure Analysis of an Aero Engine Ball Bearing. J. Fail. Anal. Prev. 2006, 6, 25–31. [Google Scholar] [CrossRef]
- Murugesan, V.; Sreejith, P.S.; Sundaresan, P.B.; Ramasubramanian, V. Analysis of an Angular Contact Ball Bearing Failure and Strategies for Failure Prevention. J. Fail. Anal. Prev. 2018, 18, 471–485. [Google Scholar] [CrossRef]
- Prashad, H. Diagnosis of Rolling-Element Bearings Failure by Localized Electrical Current Between Track Surfaces of Races and Rolling-Elements. J. Tribol. 2002, 124, 468–473. [Google Scholar] [CrossRef]
- Hou, X.; Diao, Q.; Liu, Y.; Liu, C.; Zhang, Z.; Tao, C. Failure Analysis of a Cylindrical Roller Bearing Caused by Excessive Tightening Axial Force. Machines 2022, 10, 322. [Google Scholar] [CrossRef]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal. Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Lim, C.; Kim, S.; Seo, Y.-H.; Choi, J.-H. Feature extraction for bearing prognostics using weighted correlation of fault frequencies over cycles. Struct. Health Monit. 2020, 19, 1808–1820. [Google Scholar] [CrossRef]
- Sikorska, J.Z.; Hodkiewicz, M.; Ma, L. Prognostic modelling options for remaining useful life estimation by industry. Mech. Syst. Signal Process. 2011, 25, 1803–1836. [Google Scholar] [CrossRef]
- Jouin, M.; Gouriveau, R.; Hissel, D.; P’era, M.-C.; Zerhouni, N. Degradations analysis and aging modeling for health assessment and prognostics of PEMFC. Reliab. Eng. Syst. Saf. 2016, 148, 78–95. [Google Scholar] [CrossRef]
- Ali, J.B.; Brigitte, C.M.; Lotfi, S. Accurate bearing remaining confidence interval of reliability with three-parameter Weibull distribution and artificial neural network. Mech. Syst. Signal Process. 2015, 56–57, 150–172. [Google Scholar]
- Zeming, L.; Jianmin, G.; Hongquan, J. A maintenance support framework based on dynamic reliability and remaining useful life. Measurement 2019, 147, 106835. [Google Scholar] [CrossRef]
- Tse, Y.L.; Cholette, M.E.; Tse, P.W. A multi-sensor approach to remaining useful life estimation for a slurry pump. Measurement 2019, 139, 140–151. [Google Scholar] [CrossRef]
- Cubillo, A.; Perinpanayagam, S.; Esperon-Miguez, M. A review of physics-based models in prognostics: Application to gears and bearings of rotating machinery. Adv. Mech. Eng. 2016, 8, 1–21. [Google Scholar] [CrossRef]
- Wang, T.; Li, X.; Wang, W.; Du, J.; Yang, X. A spatiotemporal feature learning-based RUL estimation method for predictive maintenance. Measurement 2023, 214, 112824. [Google Scholar] [CrossRef]
- Andraș, A.; Radu, S.M.; Brînaș, I.; Popescu, F.D.; Budilică, D.I.; Korozsi, E.B. Prediction of Material Failure Time for a Bucket Wheel Excavator Boom Using Computer Simulation. Materials 2021, 14, 7897. [Google Scholar] [CrossRef] [PubMed]
- Baraldi, P.; Bonfanti, G.; Zio, E. Differential evolution-based multi-objective optimization for the definition of a health indicator for fault diagnostics and prognostics. Mech. Syst. Signal Process. 2018, 102, 382–400. [Google Scholar] [CrossRef]
- Qiu, M.; Li, W.; Jiang, F.; Zhu, Z. Remaining Useful Life Estimation for Rolling Bearing with SIOS-Based Indicator and Particle Filtering. IEEE Access 2018, 6, 24521–24532. [Google Scholar] [CrossRef]
- Li, X.; Elasha, F.; Shanbr, S.; Mba, D. Remaining Useful Life Prediction of Rolling Element Bearings Using Supervised Machine Learning. Energies 2019, 12, 2705. [Google Scholar] [CrossRef]
- Cao, S.; Chen, G.; Peng, Y.; Lu, H.; Ren, F. Uncertainty analysis and time-dependent reliability estimation for the main shaft device of a mine hoist. Mech. Based Des. Struct. Mach. 2022, 50, 2221–2236. [Google Scholar] [CrossRef]
- Patil, A.A.; Desai, S.S.; Patil, L.N.; Patil, S.A. Adopting artificial neural network for wear investigation of ball bearing materials under pure sliding condition. Appl. Eng. Lett. 2022, 7, 81–88. [Google Scholar] [CrossRef]
- Jakubek, B.; Grochalski, K.; Rukat, W.; Sokol, H. Thermovision measurements of rolling bearings. Measurement 2022, 189, 110512. [Google Scholar] [CrossRef]
- Stack, J.R.; Habetler, T.G.; Harley, R.G. Fault classification and fault signature production for rolling element bearings in electric machines. IEEE Trans. Ind. Appl. 2004, 40, 735–739. [Google Scholar] [CrossRef]
- Rejith, R.; Kesavan, D.; Chakravarthy, P.; Narayana Murty, S.V.S. Bearings for aerospace applications. Tribol. Int. 2023, 181, 108312. [Google Scholar] [CrossRef]
- Marey, N.A.; Ali, A.A. Novel measurement and control system of universal journal bearing test rig for marine applications. Alex. Eng. J. 2023, 73, 11–26. [Google Scholar] [CrossRef]
- Huang, Y.; Lin, J.; Liu, Z.; Wu, W. A modified scale-space guiding variational mode decomposition for high-speed railway bearing fault diagnosis. J. Sound Vib. 2019, 444, 216–234. [Google Scholar] [CrossRef]
- Ulbricht, A.; Zeidler, F.; Bilkenroth, F.; Soltysiak, S. Structural lightweight components for energy-efficient rail vehicles using high performance composite materials. Transp. Res. Procedia 2023, 72, 1685–1692. [Google Scholar] [CrossRef]
- Dhanola, A.; Garg, H.C. Tribological challenges and advancements in wind turbine bearings: A review. Eng. Fail. Anal. 2020, 118, 104885. [Google Scholar] [CrossRef]
- He, Y.; Zhao, C.; Zhou, X.; Shen, W. MJAR: A novel joint generalization-based diagnosis method for industrial robots with compound faults. Robot. Comput.-Integr. Manuf. 2024, 86, 102668. [Google Scholar] [CrossRef]
- Mitrovic, R.M.; Miskovic, Z.Z.; Djukic, M.B.; Bakic, G.M. Statistical correlation between vibration characteristics, surface temperatures and service life of rolling bearings—Artificially contaminated by open pit coal mine debris particles. Procedia Struct. Integr. 2016, 2, 2338–2346. [Google Scholar] [CrossRef]
- Ghamd, A.M.; Mba, D.H. A comparative experimental study on the use of acoustic emission and vibration analysis for bearing defect identification and estimation of defect size. Mech. Syst. Signal Process. 2006, 20, 1537–1571. [Google Scholar] [CrossRef]
- Takabi, J.; Khonsari, M.M. Experimental testing and thermal analysis of ball bearings. Tribol. Int. 2013, 60, 93–103. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Bertoni, R.; André, H. Proposition of a bearing diagnosis method applied to IAS and vibration signals: The Bearing Frequency Estimation Method. Mech. Syst. Signal Process. 2023, 187, 109891. [Google Scholar] [CrossRef]
- Shakya, P.; Darpe, A.K.; Kulkarni, M.S. Bearing diagnosis using proximity probe and accelerometer. Measurement 2016, 80, 190–200. [Google Scholar] [CrossRef]
- Kass, S.; Raad, A.; Antoni, J. Self-running bearing diagnosis based on scalar indicator using fast order frequency spectral coherence. Measurement 2019, 138, 467–484. [Google Scholar] [CrossRef]
- Kecik, K.; Smagala, A.; Ciecieląg, K. Diagnosis of angular contact ball bearing defects based on recurrence diagrams and quantification analysis of vibration signals. Measurement 2023, 216, 112963. [Google Scholar] [CrossRef]
- Minescu, M.; Marius, S. Fault Detection and Analysis at Pumping Units by Vibration Interpreting Encountered in Extraction of Oil. J. Balk. Tribol. Assoc. 2015, 21, 711–723. [Google Scholar]
- Saruhan, H.; Sandemir, S.; Çiçek, A.; Uygur, I. Vibration Analysis of Rolling Element Bearings Defects. J. Appl. Res. Technol. 2014, 12, 384–395. [Google Scholar] [CrossRef]
- Salem, A.; Abdelrahman, A.; Sassi, S.; Renno, J. Time-Domain Based Qualification of Surface Degradation for Better Monitoring of the Health Condition of Ball Bearings. Vibration 2018, 1, 172–191. [Google Scholar] [CrossRef]
- Chen, X.; Shen, Z.; He, Z.; Sun, C.; Liu, Z. Remaining Life Prognostics of Rolling Bearing Based on Relative Features and Multivariable Support Vector Machine. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 2849–2860. [Google Scholar] [CrossRef]
- Shearer, C. The CRISP-DM model: The New Blueprint for Data Mining. J. Data Warehous. 2000, 5, 13–22. [Google Scholar]
- Rohanizadeh, S.S.; Moghadam, M.B. A Proposed Data Mining Methodology and its Application to Industrial Procedures. J. Optim. Ind. Eng. 2010, 1, 37–50. [Google Scholar]
- Matignon, R. Data Mining Using SAS Enterprise MinerTM; John Wiley and Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Mao, L.; Davies, B.; Jackson, L. Application of the sensor selection approach in polymer electrolyte membrane fuel cell prognostics and health management. Energies 2017, 10, 1511. [Google Scholar] [CrossRef]
- Albright, S.C. Business Analytics: Data Analysis and Decision Making; Cengage Learning: Boston, MA, USA, 2017. [Google Scholar]
- Alshawarbeh, E.; Abdulrahman, A.T.; Hussam, E. Statistical Modeling of High Frequency Datasets Using the ARIMA-ANN Hybrid. Mathematics 2023, 11, 4594. [Google Scholar] [CrossRef]
- Rybak, A.; Rybak, A.; Kolev, S.D. Modeling the Photovoltaic Power Generation in Poland in the Light of PEP2040: An Application of Multiple Regression. Energies 2023, 16, 7476. [Google Scholar] [CrossRef]
- Zuhdi, F.; Anggraini, R.S.; Yusuf, R. Rubber Production Projection in Riau Province Using Autoregressive Integrated Moving Average (ARIMA) Approach. J. Econ. 2022, 18, 40–50. [Google Scholar] [CrossRef]
- Nurhamidah, N.; Nusyirwan, N.; Faisol, A. Forecasting Seasonal Time Series Data using the Holt-Winters Exponential Smoothing Method of Additive Models. J. Mat. Integr. 2020, 16, 151–157. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef]
- Moreno, E. Manual de Uso de SPSS, 1st ed.; Universidad Nacional de Educación a Distancia: Madrid, Spain, 2008. [Google Scholar]
- Der, G.; Everitt, B.S. Analyses Using SAS, 3rd ed.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2008. [Google Scholar]
- Wickham, H.; Çetinkaya-Rundel, M.; Grolemund, G. R for Data Science, 2nd ed.; O’Reilly Media: Sebastopol, CA, USA, 2023. [Google Scholar]
- Cowpertwait, P.S.P.; Metcalfe, A.V. Introductory Time Series with R; Springer: New York, NY, USA, 2009. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roller Weight (kg) | Roller Weight (lb) | Outside Diameter (cm) | Outside Diameter (in) |
|---|---|---|---|
| 1759 | 3878 | 1090 | 43 |
| Type of Characteristic | Description |
|---|---|
| Sensor Features | IP 67 Rated/3.6 V Battery/weight: 100 g/Size: 47 mm × 33 mm. |
| Mounting type | Universal Heavy-duty Magnet |
| Gateway type | Cloud connectivity, Modbus TCP/IP communication, MQTT protocol, and OPC communication |
| Gateway feature | Conventional 5 VDC at 2 A power supply/Processor Quad Core 105 GHz/RAM 512 Mb/Wi-Fi protocol 2.4 and 5 GHz |
| Statistical Parameter | Rms Vel. H Roller #1 | Rms Vel. H Roller #2 | Rms Vel. H Roller #3 | Rms Vel. H Roller #4 |
|---|---|---|---|---|
| Mean | 0.748 | 0.617 | 0.693 | 0.616 |
| Variance | 0.060 | 0.064 | 0.046 | 0.033 |
| Std. Dev. | 0.245 | 0.252 | 0.215 | 0.183 |
| Median | 0.690 | 0.560 | 0.660 | 0.610 |
| Mode | 0.192 | 0.186 | 0.167 | 0.148 |
| Minimum | 0.600 | 0.570 | 0.520 | 0.890 |
| Maximum | 0.350 | 0.250 | 0.040 | 0.265 |
| Count | 748.000 | 748.000 | 748.000 | 748.000 |
| Sum | 559.710 | 461.700 | 518.500 | 461.115 |
| Stationary Test | R1 | R3 |
|---|---|---|
| Dickey–Fuller | −5.0492 | −5.3859 |
| Lag order | 6 | 7 |
| p-value | 0.01 | 0.01 |
| Alternative hypothesis | stationary | stationary |
| Model Selection Test | ||
|---|---|---|
| Suggested by PACF | AR(1) | AR(3) |
| Model | ARIMA(1,1,1) | ARIMA(3,1,1) |
| Series | R1 | R3 |
| Drift Coefficients | ||
| ar1 | 0.2399 | 0.2974 |
| 0.0608 | 0.0511 | |
| ar2 | - | 0.0434 |
| - | 0.0510 | |
| ar3 | - | 0.1078 |
| - | 0.0510 | |
| ma1 | −0.9327 | −0.9327 |
| 0.0250 | 0.0250 | |
| drift | −3 × 10−4 | −3 × 10−4 |
| 1 × 10−3 | 1 × 10−3 | |
| σ2 estimation | 0.04332 | 0.0296 |
| log likelihood | 51.48 | 156.22 |
| AIC | 94.96 | 300.44 |
| AICc | 94.84 | 300.26 |
| Model Evaluation (Box–Ljung Test) | ||
|---|---|---|
| data | Residuals (Roller #1) | Residuals (Roller #3) |
| X-squared | 0.071579 | 0.0013889 |
| df | 1 | 1 |
| p-value | 0.7891 | 0.9703 |
| Stationary Test | R1 | R3 |
|---|---|---|
| α (alpha) | 0.3 | 0.2 |
| β (beta) | 0.1 | 0.1 |
| γ (gamma) | 0.1 | 0.1 |
| level | 0.95 | 0.95 |
| Roller #1 Overall Vibration | ME | MAPE | MAE | RMSE |
| ARIMA | −0.079 | 0.212 | 0.088 | 15.394 |
| Holt–Winters | −0.050 | 0.197 | 0.085 | 14.210 |
| Roller #3 Overall Vibration | ME | MAPE | MAE | RMSE |
| ARIMA | −0.007 | 0.138 | 0.055 | 7.850 |
| Holt–Winters | −0.006 | 0.100 | 0.036 | 4.850 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Primera, E.; Fernández, D.; Cacereño, A.; Rodríguez-Prieto, A. Predictive Analytics-Based Methodology Supported by Wireless Monitoring for the Prognosis of Roller-Bearing Failure. Machines 2024, 12, 69. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010069
Primera E, Fernández D, Cacereño A, Rodríguez-Prieto A. Predictive Analytics-Based Methodology Supported by Wireless Monitoring for the Prognosis of Roller-Bearing Failure. Machines. 2024; 12(1):69. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010069
Chicago/Turabian StylePrimera, Ernesto, Daniel Fernández, Andrés Cacereño, and Alvaro Rodríguez-Prieto. 2024. "Predictive Analytics-Based Methodology Supported by Wireless Monitoring for the Prognosis of Roller-Bearing Failure" Machines 12, no. 1: 69. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010069