
Low-Pass Filtering Method for Poisson Data Time Series


 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Method
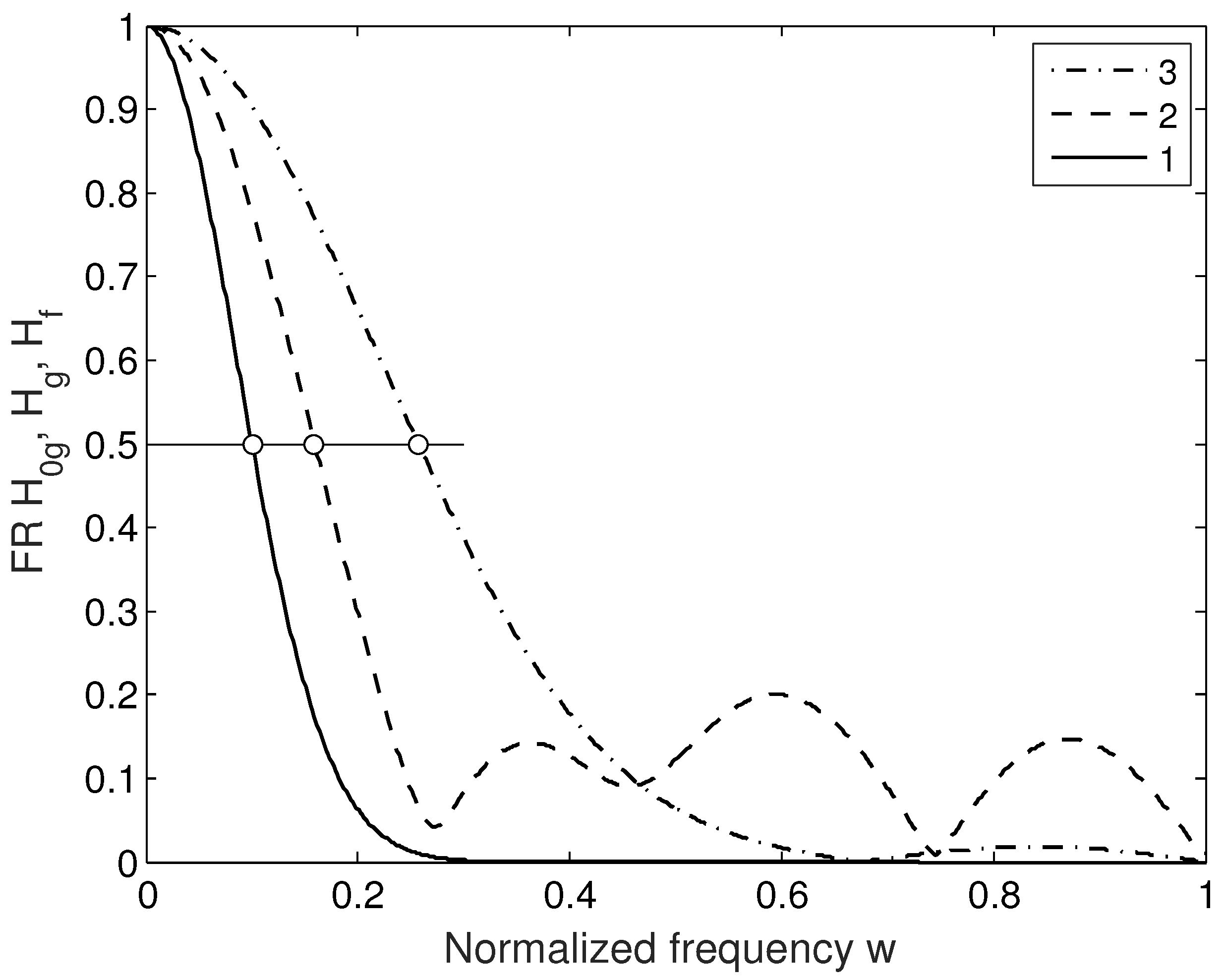
2.1. Quasi–Gaussian Digital Low-Pass Filter
2.1.1. Statement of the Problem
2.1.2. Synthesis Requiements
- Ensuring that the gain at zero frequencies is equal to one:
- Ensuring non-negativity of coefficients:
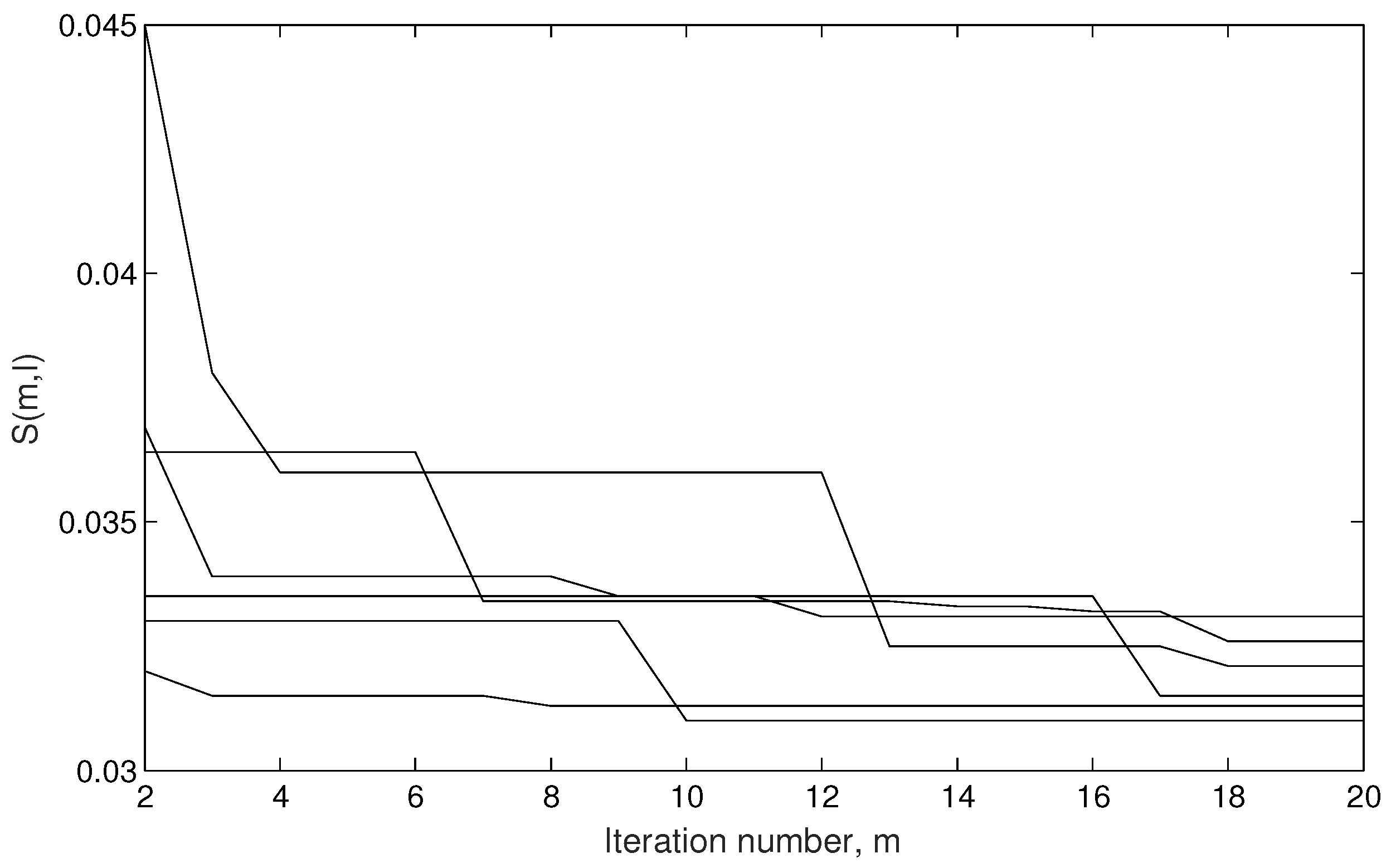
2.2. Quasi–Gaussian Filter Synthesis Procedure
3. Results
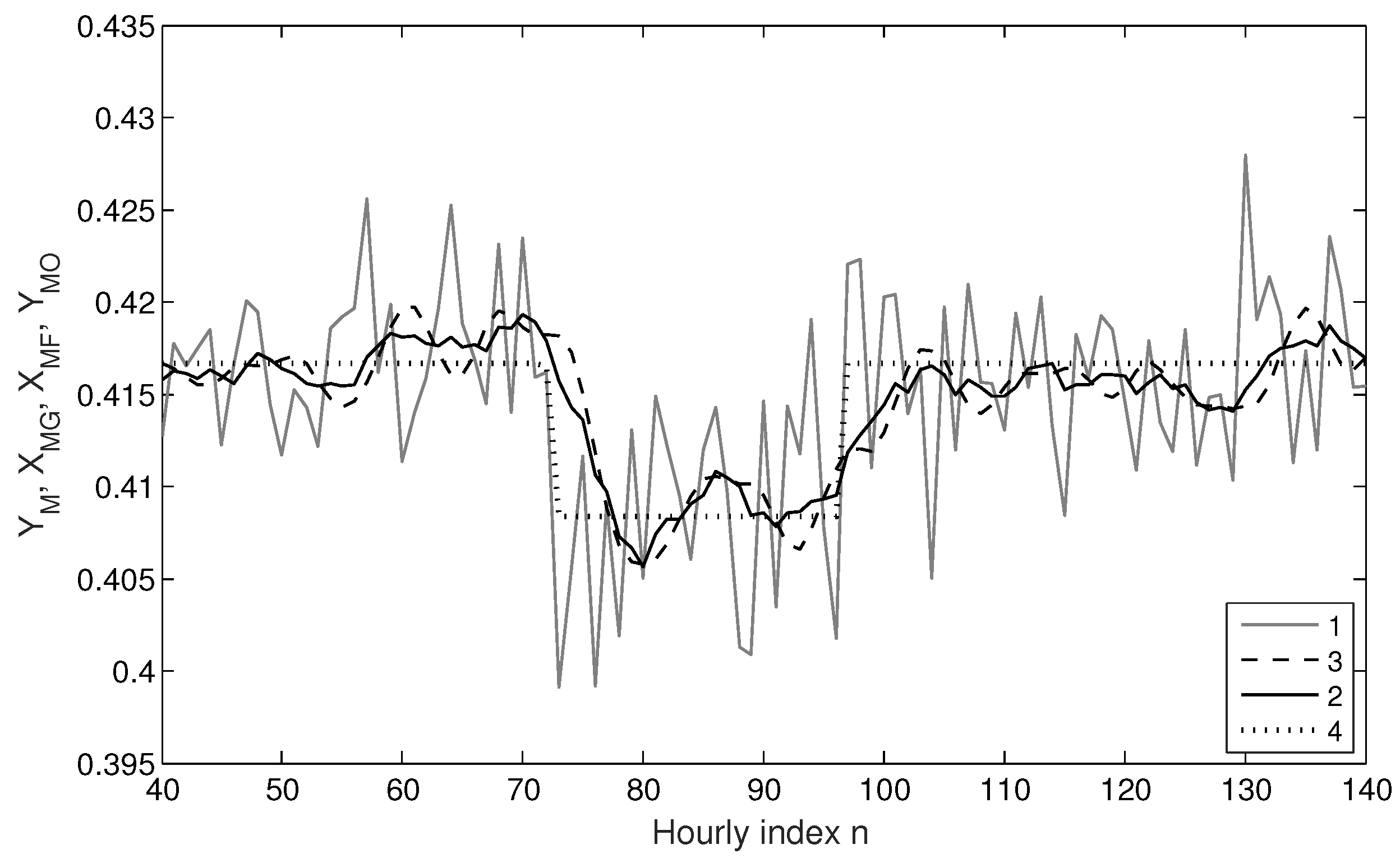
3.1. Testing the Method and the Quasi–Gaussian Filter on Model Normalized Poisson Data
3.1.1. Testing on Model Hourly Data Using Statistical Modeling
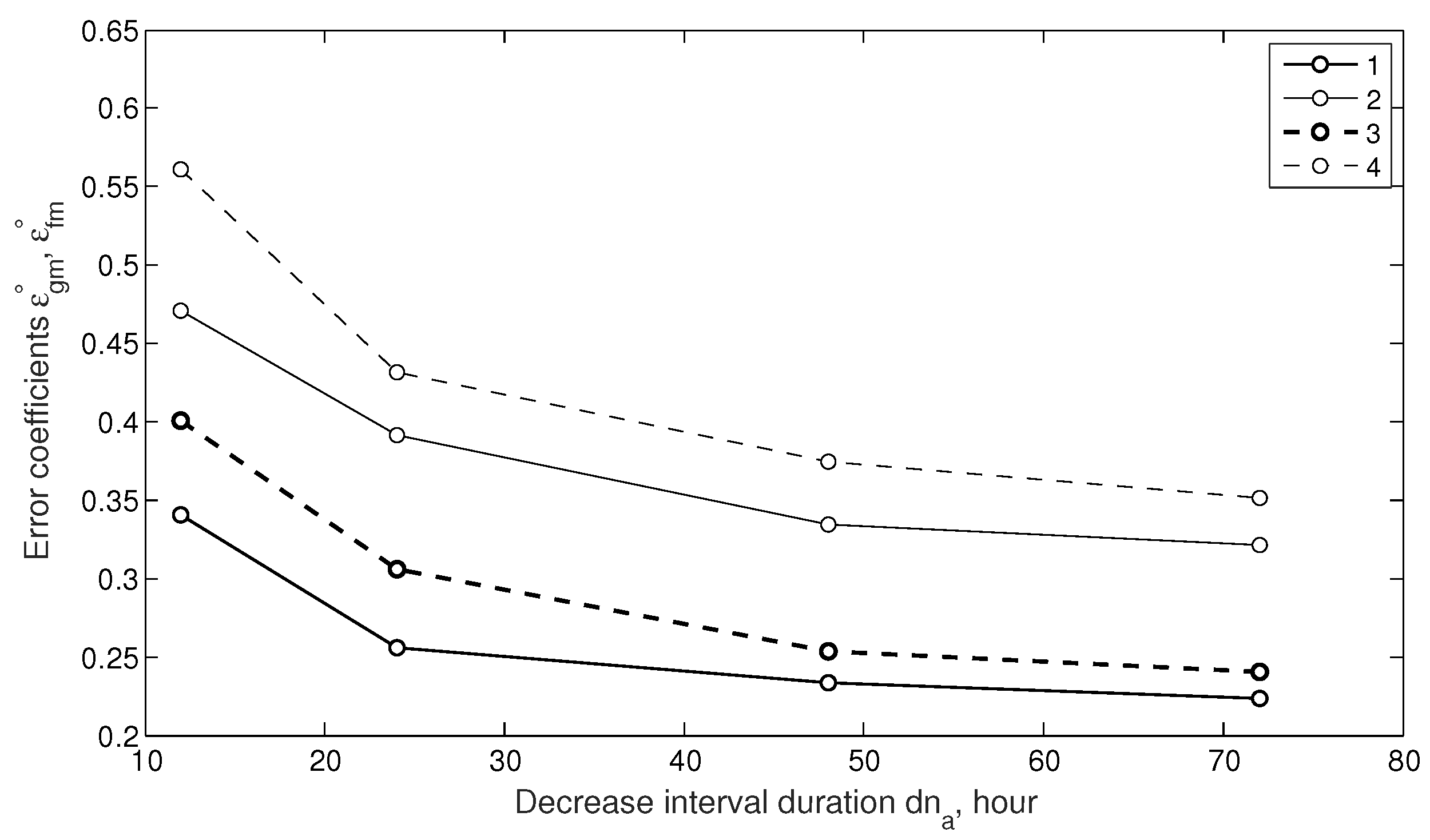
3.1.2. Estimation of Mathematical Expectation and Its Root Mean Square Errors
- (11.5%) for and ;
- (19.6%) for and .
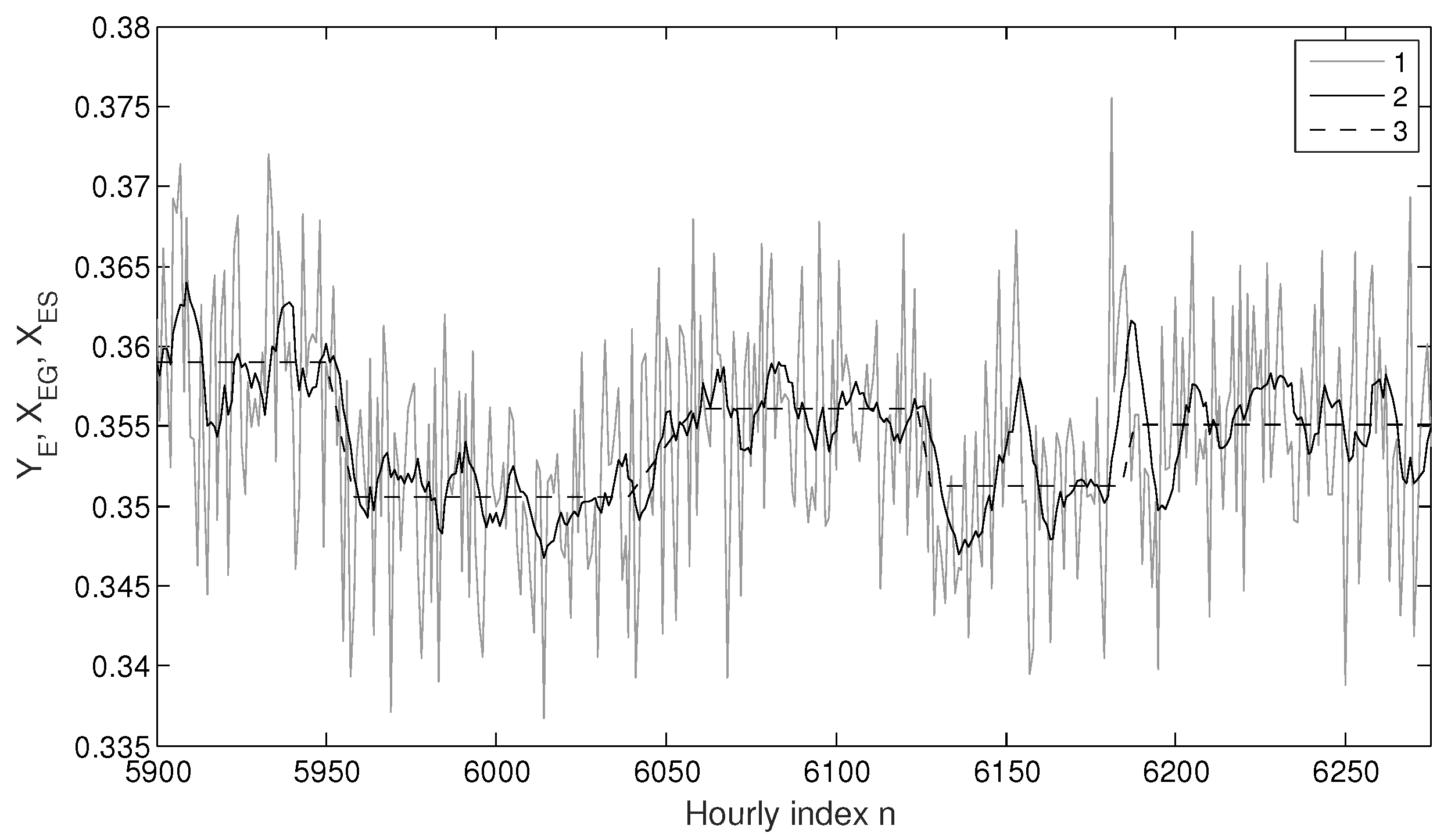
3.2. Testing the Method and the Quasi–Gaussian Filter on Experimental Normalized Poisson Data from the URAGAN Hodoscope
4. Discussion
5. Conclusions
- The proposed method provided a decrease in errors in the filtered time series in comparison with the error values for standard FIR filters, by ≈15–30%; the method made it possible to recognize the mathematical expectation fluctuations with a relative decrease of 0.02 and duration of ≈12–24 h;
- The proposed method and the developed quasi-Gaussian filter provided relative error coefficients for mathematical expectation and root mean square values that appeared to be ≈10–30% less than the error coefficients for common FIR filters.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lloyd, E.; Ledermann, W. (Eds.) Handbook of Applicable Mathematics, Russian ed.; Finansy I Statistika: Moscow, Russia, 1989; Volume 1, pp. 45–83. (In Russian) [Google Scholar]
- Taylor, F.J. Digital Filters: Principles and Applications with MATLAB; J. Wiley I& Sons: New York, NY, USA, 2011; pp. 53–70. [Google Scholar]
- Filter Design Matlab Toolbox. Available online: http://matlab.exponenta.ru (accessed on 7 March 2021).
- Sergienko, A.B. Digital Signal Processing: Textbook, 3rd ed.; BHV-Peterburg: St. Petersburg, Russia, 2011; pp. 371–440. (In Russian) [Google Scholar]
- Getmanov, V.G. Digital Signal Processing, 2nd ed.; National Research Nuclear University MEPhI: Moscow, Russia, 2010; pp. 210–225. (In Russian) [Google Scholar]
- Goncharov, G.A.; Zubatkin, O.Y.; Lopatin, P.A. Calculation of a filter with a frequency response close to a Gaussian curve. Commun. Equip. Dig. 1978, 5, 43–49. (In Russian) [Google Scholar]
- Bugrov, V.N.; Bessonova, E.V. Numerical design of Gaussian digital filters. Electron. Des. Technol. 2012, 3, 40–42. (In Russian) [Google Scholar]
- Rockenbach, M.; Dal Lago, A.; Schuch, N.J.; Munakata, K.; Kuwabara, T.; Oliveira, A.G.; Echer, E.; Braga, C.R.; Mendonça, R.R.S.; Kato, C.; et al. Global Muon Detector Network Used for Space Weather Applications. Space Sci. Rev. 2014, 182, 1–18. [Google Scholar] [CrossRef]
- Grupen, C.; Shwartz, B. Particle Detectors, 2nd ed.; Cambridge University Press: New York, NY, USA, 2008; pp. 56–84. [Google Scholar]
- Yashin, I.I.; Astapov, I.I.; Barbashina, N.S.; Borog, V.V.; Chernov, D.V.; Dmitrieva, A.N.; Kokoulin, R.P.; Kompaniets, K.G.; Mishutina, Y.N.; Petrukhin, A.A.; et al. Real-time data of muon hodoscope URAGAN. Adv. Space Res. 2015, 56, 2693–2705. [Google Scholar] [CrossRef]
- Barbashina, N.S.; Kokoulin, R.P.; Kompaniets, K.G.; Mannocchi, A.; Petrukhin, A.A.; Timashkov, D.A.; Saavedra, O.; Trinchero, G.; Chernov, D.V.; Shutenko, V.V.; et al. The URAGAN wide-aperture large-area muon hodoscope. Instrum. Exp. Technol. 2008, 51, 180–186. [Google Scholar] [CrossRef]
- NEVOD COMPLEX. National Research Nuclear University MEPhI. Available online: http://www.nevod.mephi.ru (accessed on 6 March 2021).
- Himmelblau, D.M. Applied Nonlinear Programming, Russian ed.; Mir: Moscow, Russia, 1975; pp. 157–193. (In Russian) [Google Scholar]
- Panteleev, A.V.; Skavinskaya, D.V. Metaheuristic Algorithms for Global Optimization; University Book: Moscow, Russia, 2019; pp. 5–29. (In Russian) [Google Scholar]
- Ingber, L.; Oliveira, E.H.; Petraglia, A.L.; Petraglia, M.R.; Machado, M.A.S. Stochastic Global Optimization and its Applications with Fuzzy Adaptive Simulated Annealing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 33–62. [Google Scholar]
- Global Optimization Matlab Toolbox. Available online: http://matlab.exponenta.ru (accessed on 4 March 2021).
- Mikhailov, G.A.; Voytishek, A.V. Numerical Statistical Modeling. Monte Carlo Method; Yurayt Publishing House: Moscow, Russia, 2018; pp. 126–174. (In Russian) [Google Scholar]
- Statistic Matlab Toolbox. Available online: http://matlab.exponenta.ru (accessed on 5 March 2021).
- Sidorov, R.; Soloviev, A.; Gvishiani, A.; Viktor Getmanov, V.; Mandea, M.; Petrukhin, A.; Yashin, I.; Obraztsov, A. A combined analysis of geomagnetic data and cosmic ray secondaries for the September 2017 space weather event studies. Russ. J. Earth Sci. 2019, 19, ES4001. [Google Scholar] [CrossRef] [Green Version]
- Oshchenko, A.A.; Sidorov, R.V.; Soloviev, A.A.; Solovieva, E.N. Overview of anomality measure application for estimating geomagnetic activity. Geophys. Res. 2020, 21, 51–69. (In Russian) [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Getmanov, V.; Chinkin, V.; Sidorov, R.; Gvishiani, A.; Dobrovolsky, M.; Soloviev, A.; Dmitrieva, A.; Kovylyaeva, A.; Osetrova, N.; Yashin, I. Low-Pass Filtering Method for Poisson Data Time Series. Appl. Sci. 2021, 11, 4524. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104524
Getmanov V, Chinkin V, Sidorov R, Gvishiani A, Dobrovolsky M, Soloviev A, Dmitrieva A, Kovylyaeva A, Osetrova N, Yashin I. Low-Pass Filtering Method for Poisson Data Time Series. Applied Sciences. 2021; 11(10):4524. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104524
Chicago/Turabian StyleGetmanov, Victor, Vladislav Chinkin, Roman Sidorov, Alexei Gvishiani, Mikhail Dobrovolsky, Anatoly Soloviev, Anna Dmitrieva, Anna Kovylyaeva, Nataliya Osetrova, and Igor Yashin. 2021. "Low-Pass Filtering Method for Poisson Data Time Series" Applied Sciences 11, no. 10: 4524. https://0-doi-org.brum.beds.ac.uk/10.3390/app11104524