
Electric Vehicles Charging Management for Real-Time Pricing Considering the Preferences of Individual Vehicles

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
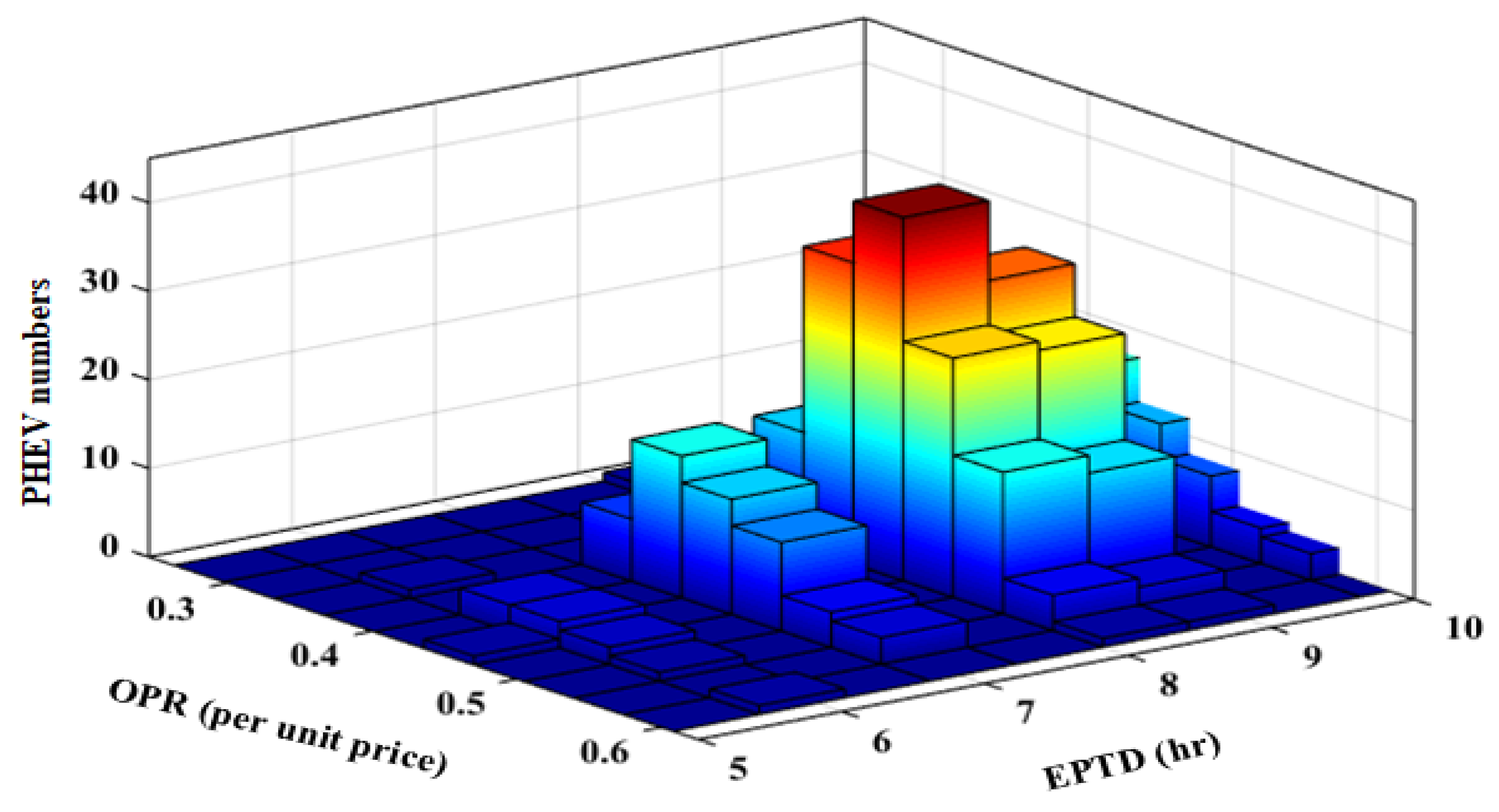
- Developing queue model to account for owner preferences such as electricity tariff rate (ETR) and estimated parking time duration (EPTD) (the time that the owner could keep his vehicle plugged in the grid).
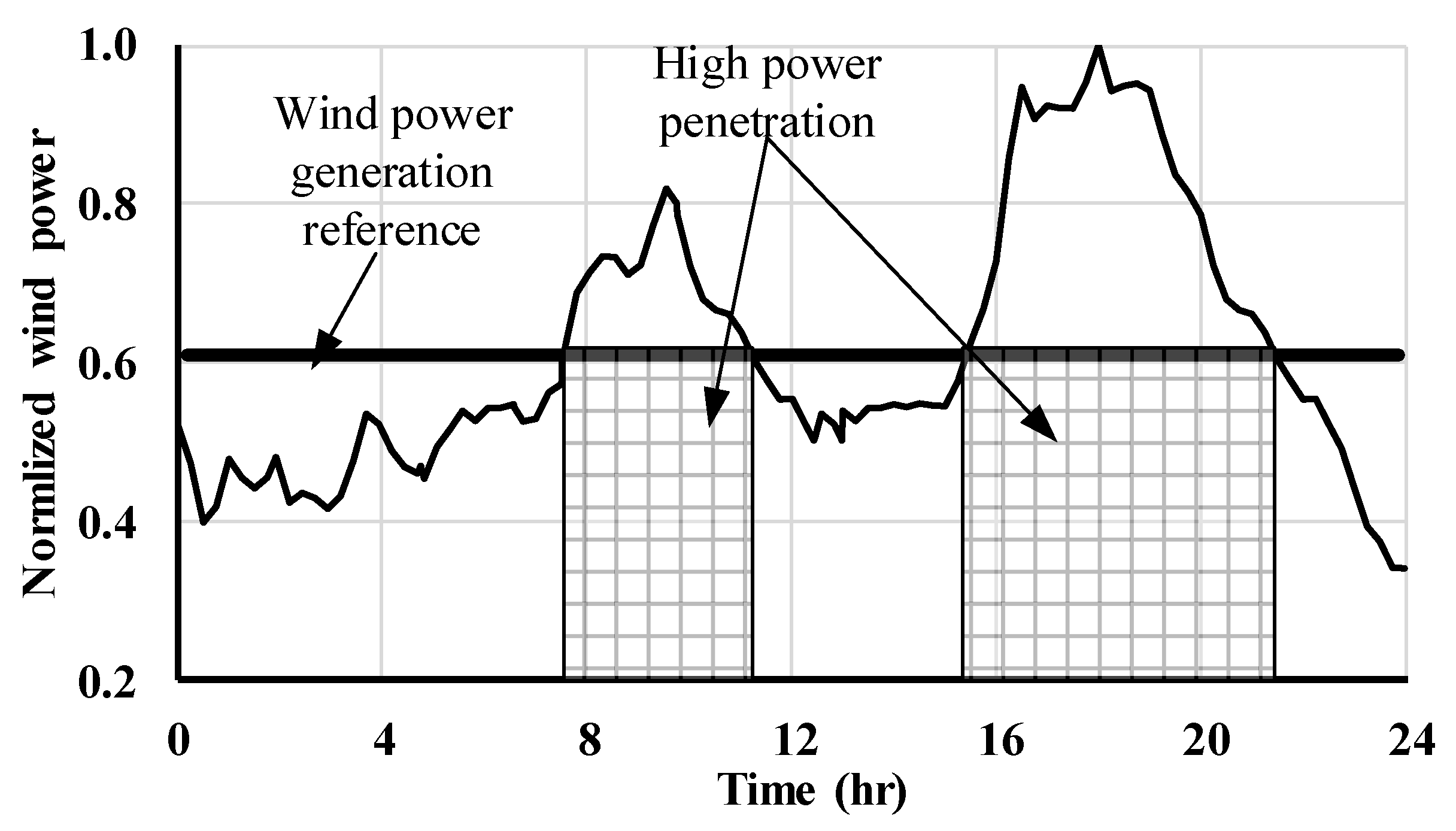
- Using incentive electricity tariffs with wind power generation and investigating their impact on both owner and the grid in terms of charging cost and peak load shifting respectively.
2. Queue Model
2.1. Mathematical Formulation of Queue
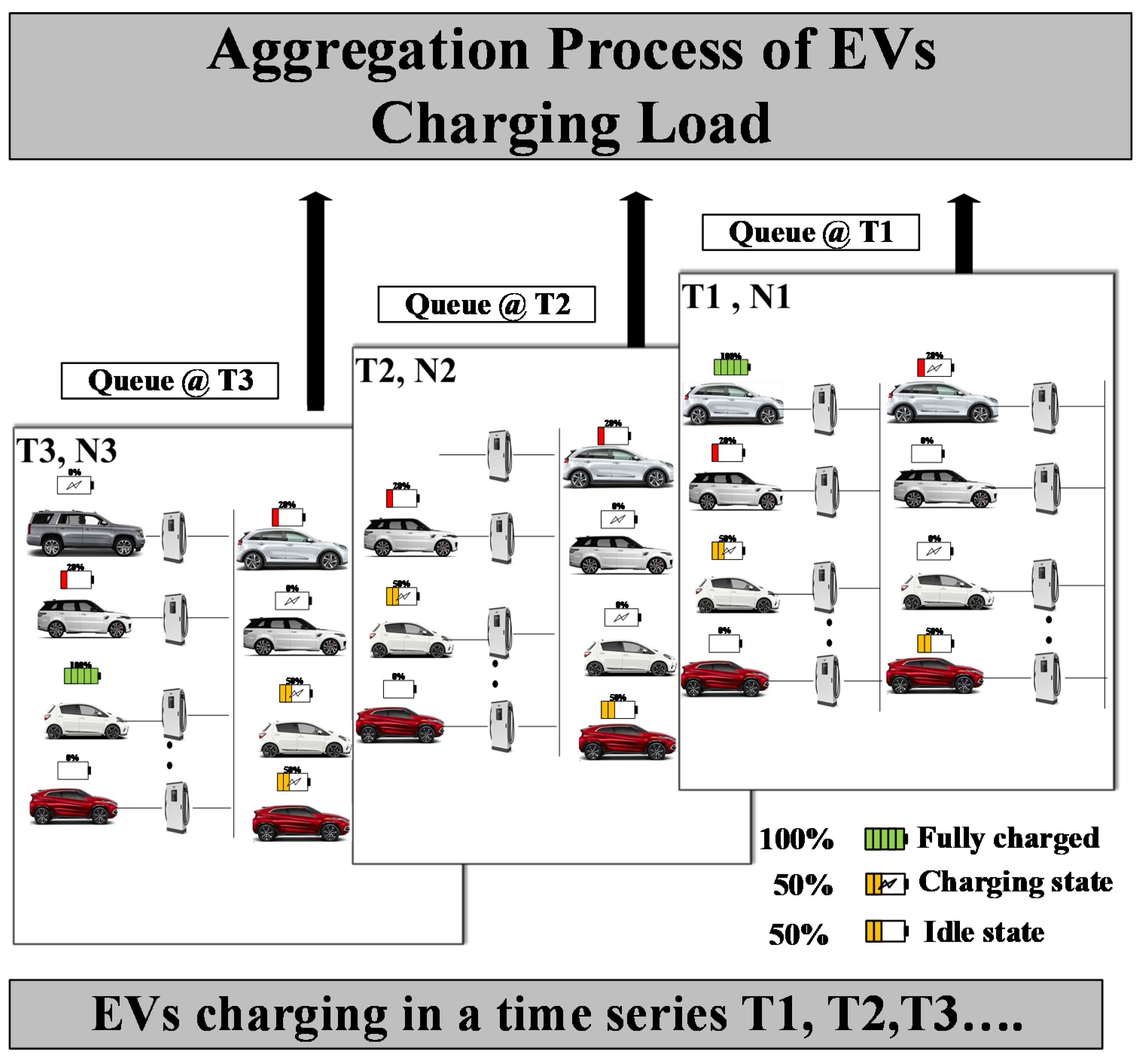
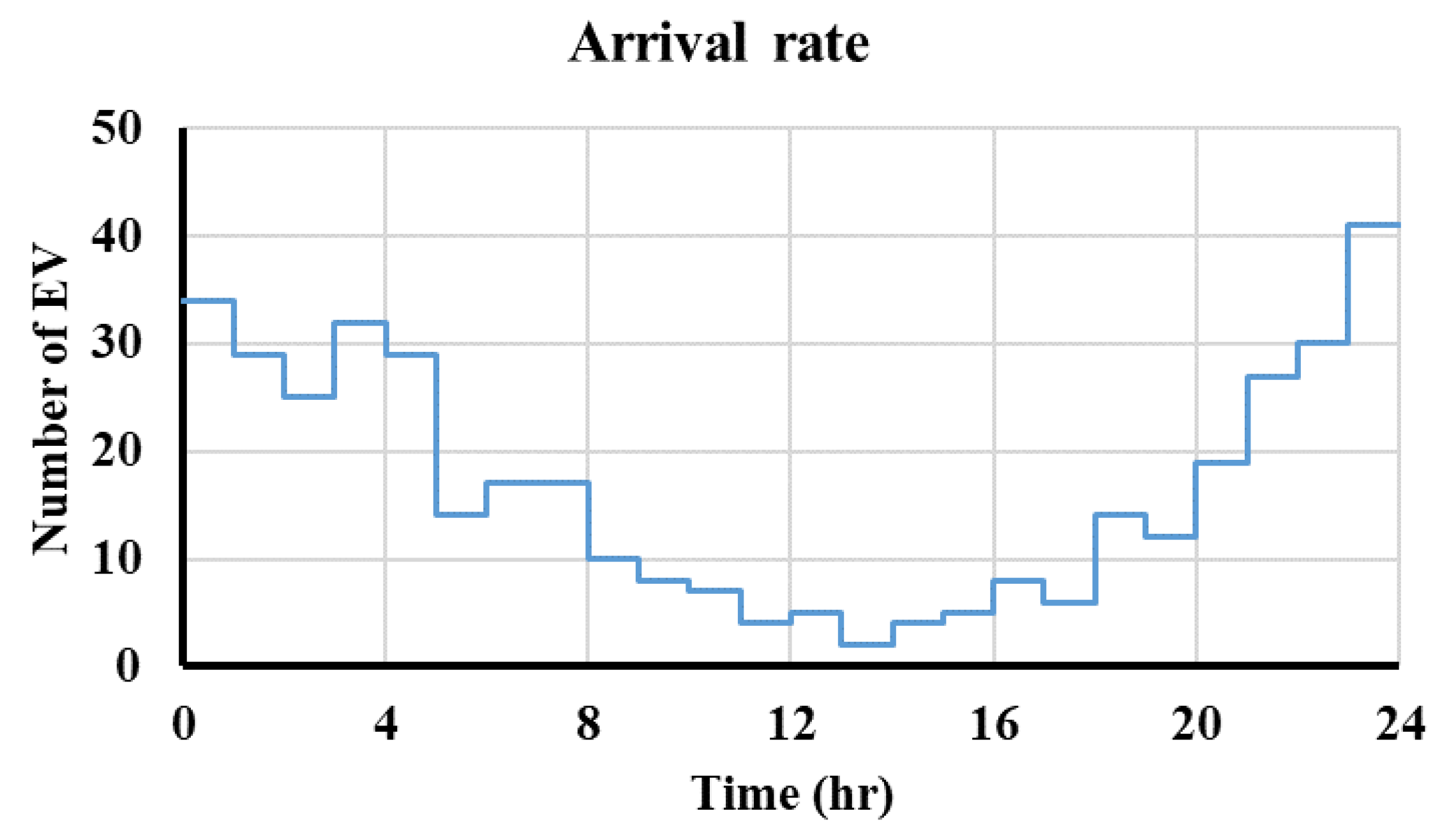
- Arrivals of EVs characterized by a statistical distribution with an arrival rate which is represented by a number NEV of the EV connected to the grid at a specific time T (see Figure 1)
- EVs queue includes several EVs waiting in a line to charge. It should be mentioned here that the line represents EVs connected to the network and all vehicles are connected to the network and are either charging or not.
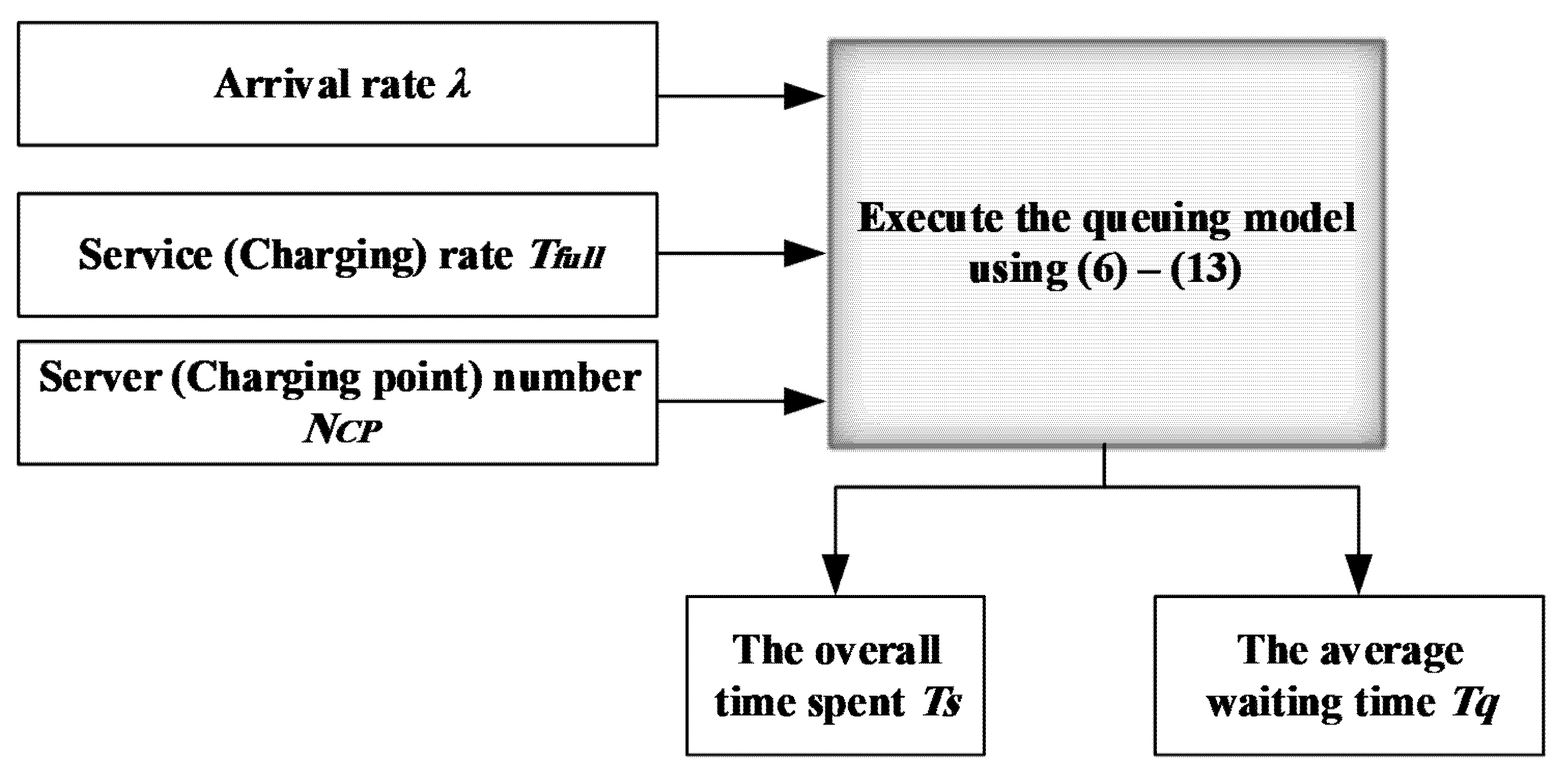
- The charging service includes several servers (charging points NCP) subject to a statistical distribution of service times (charging time).
2.2. Numeric Example for the Queuing Model
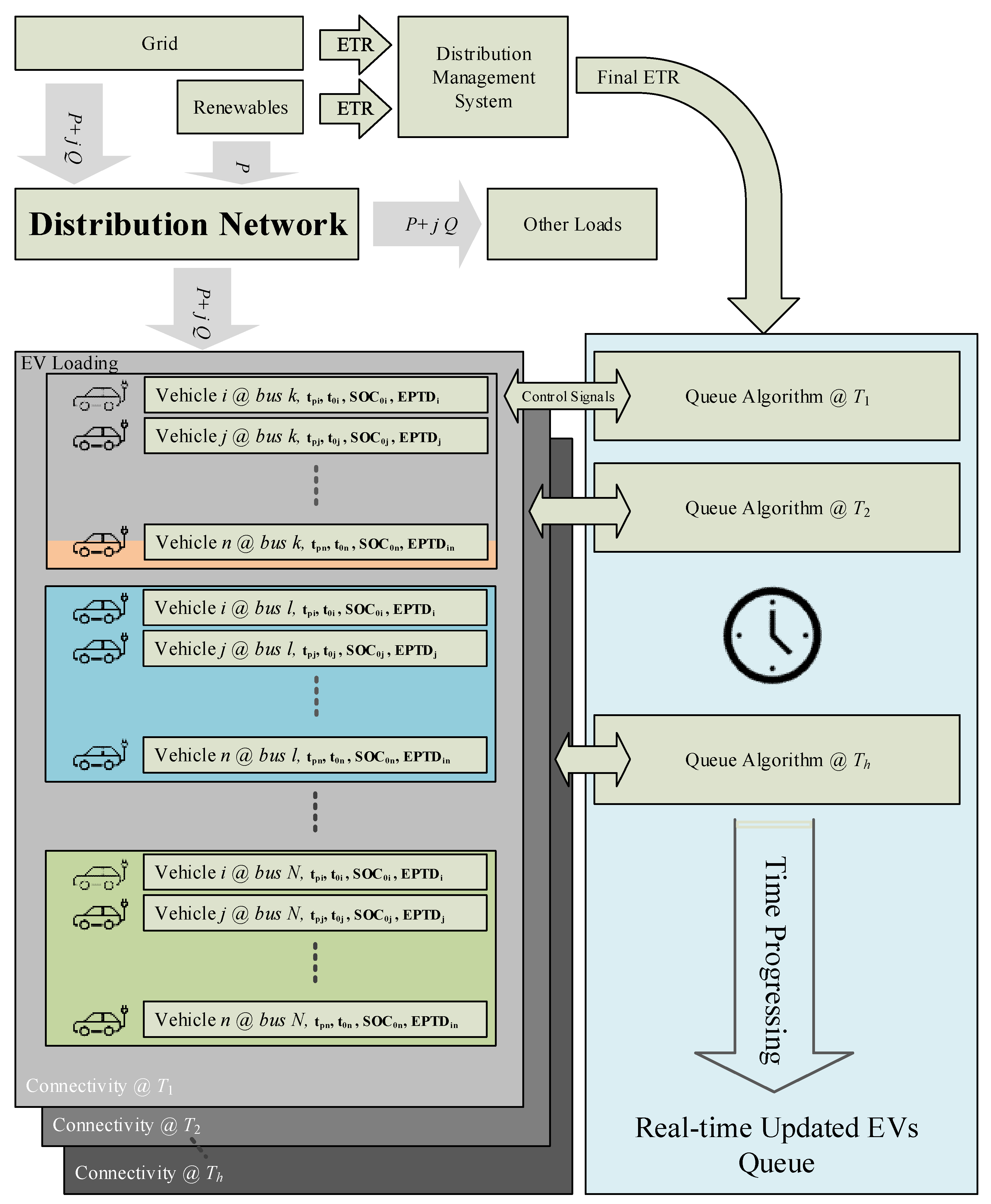
3. EVs Charging Based on Owner’s Preferences Queue
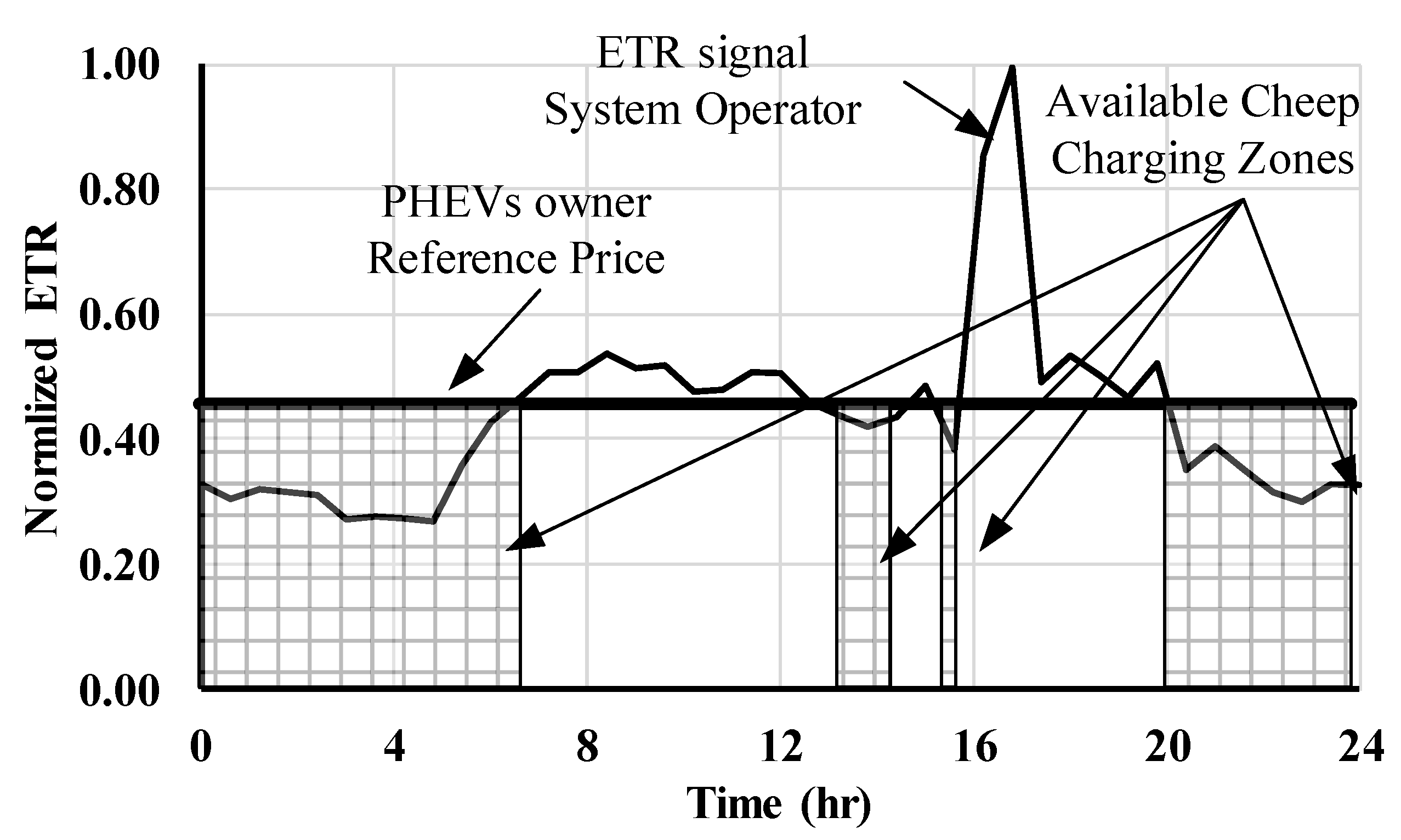
3.1. Owner Preferences
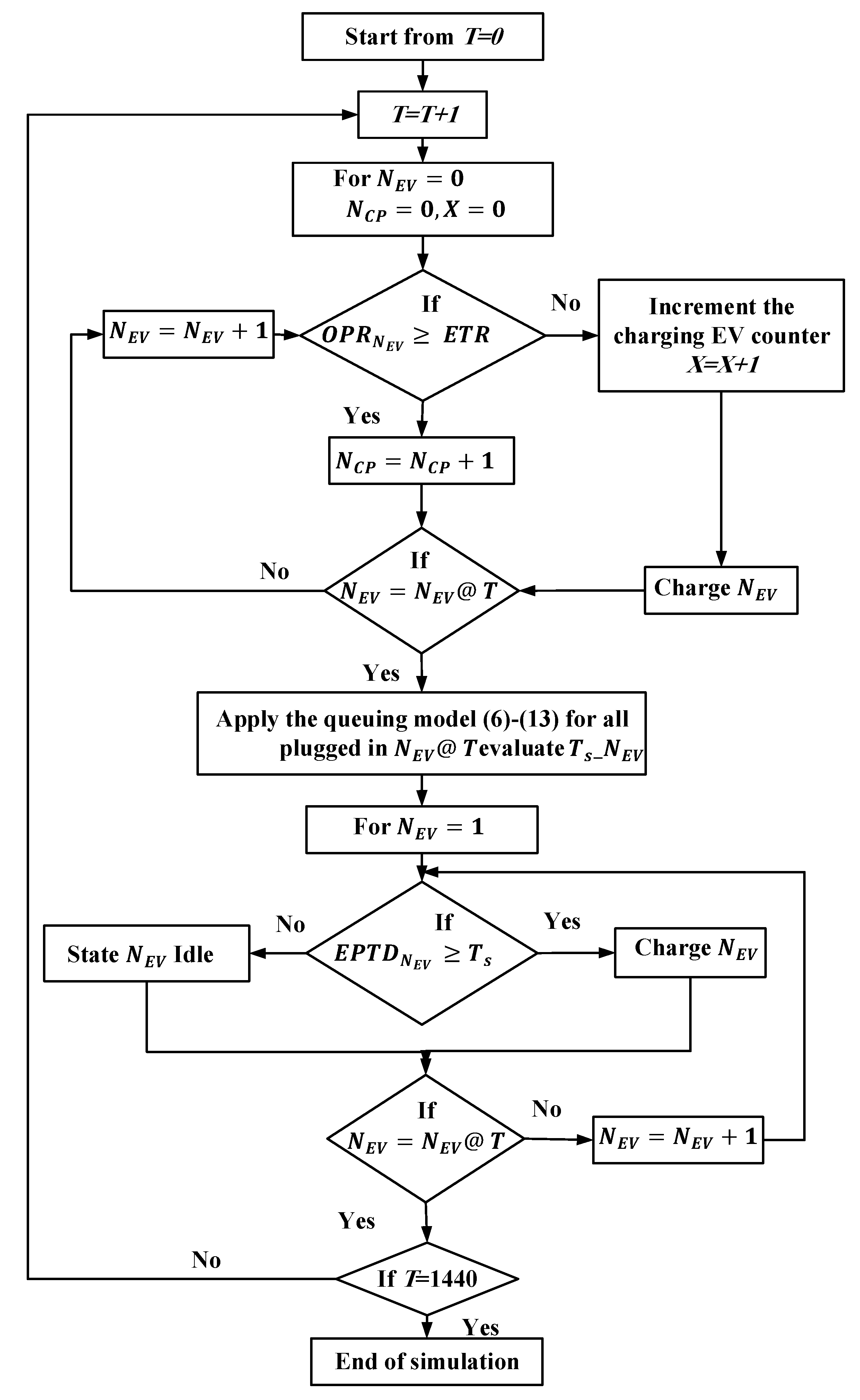
3.2. EVs Charging Queue
| Algorithm1: EV queue charging formulation |
| 1: Initialize time step T, number of EVs , number of charging point 2: while (T < ) 3: for each plugged-in EV 6: Update EPTD and OPR 10: if1 11: State the EV to charging mode 12: else if1 13: Increment 14: Apply the queue model (6) to (13) to determine the Ts 15: if 2 16: State the EV to charging mode 17: else 18: State the EV to idle mode 19: end if2 20: end if1 21: 22: end while 23: return the final EV charging load |
3.3. Implementation of Real-Time Simulation with EV Charging
4. Result and Discussion
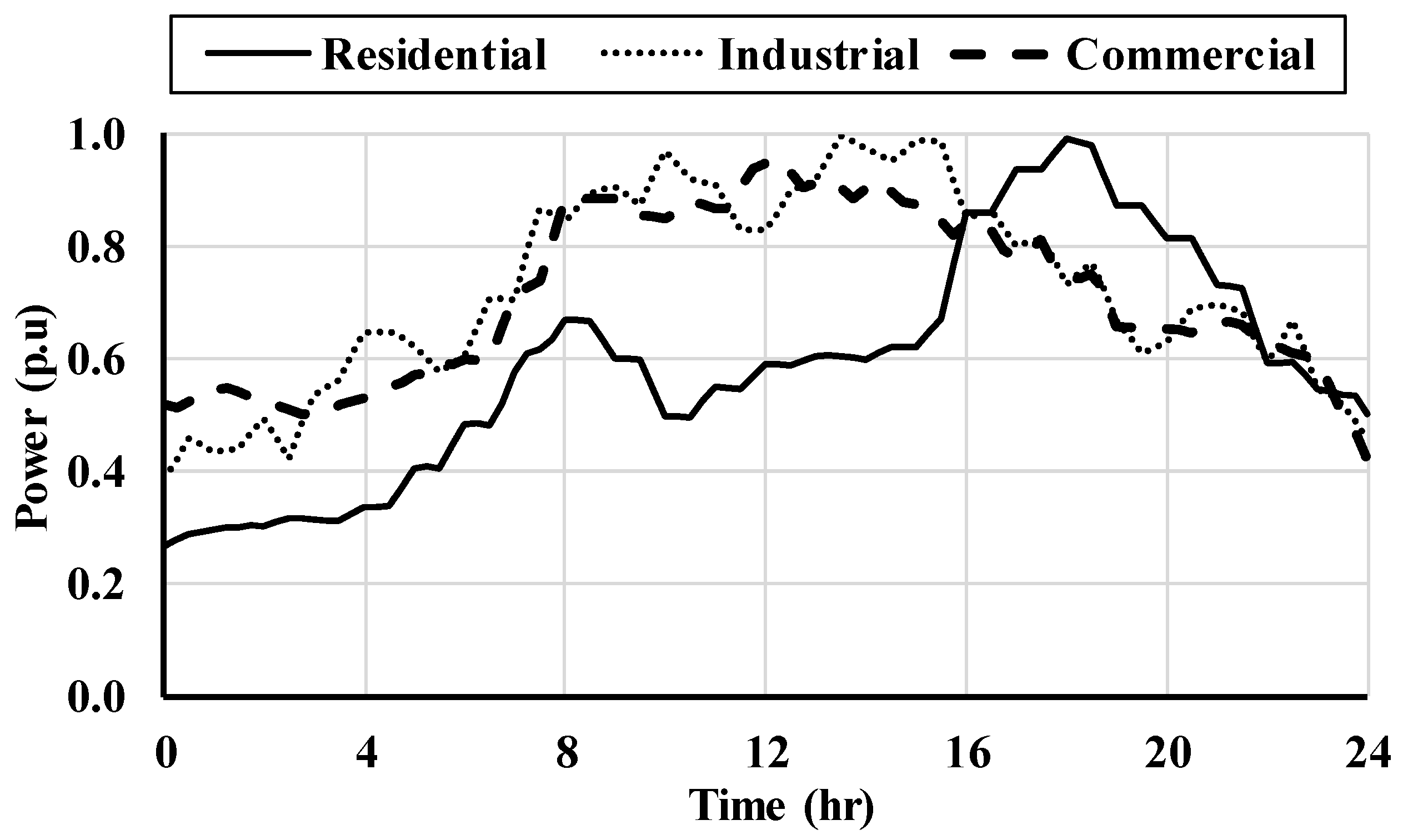
4.1. Test System Description
- Base case (without EV): this case represents the IEEE 123 with considering classical loads profile only.
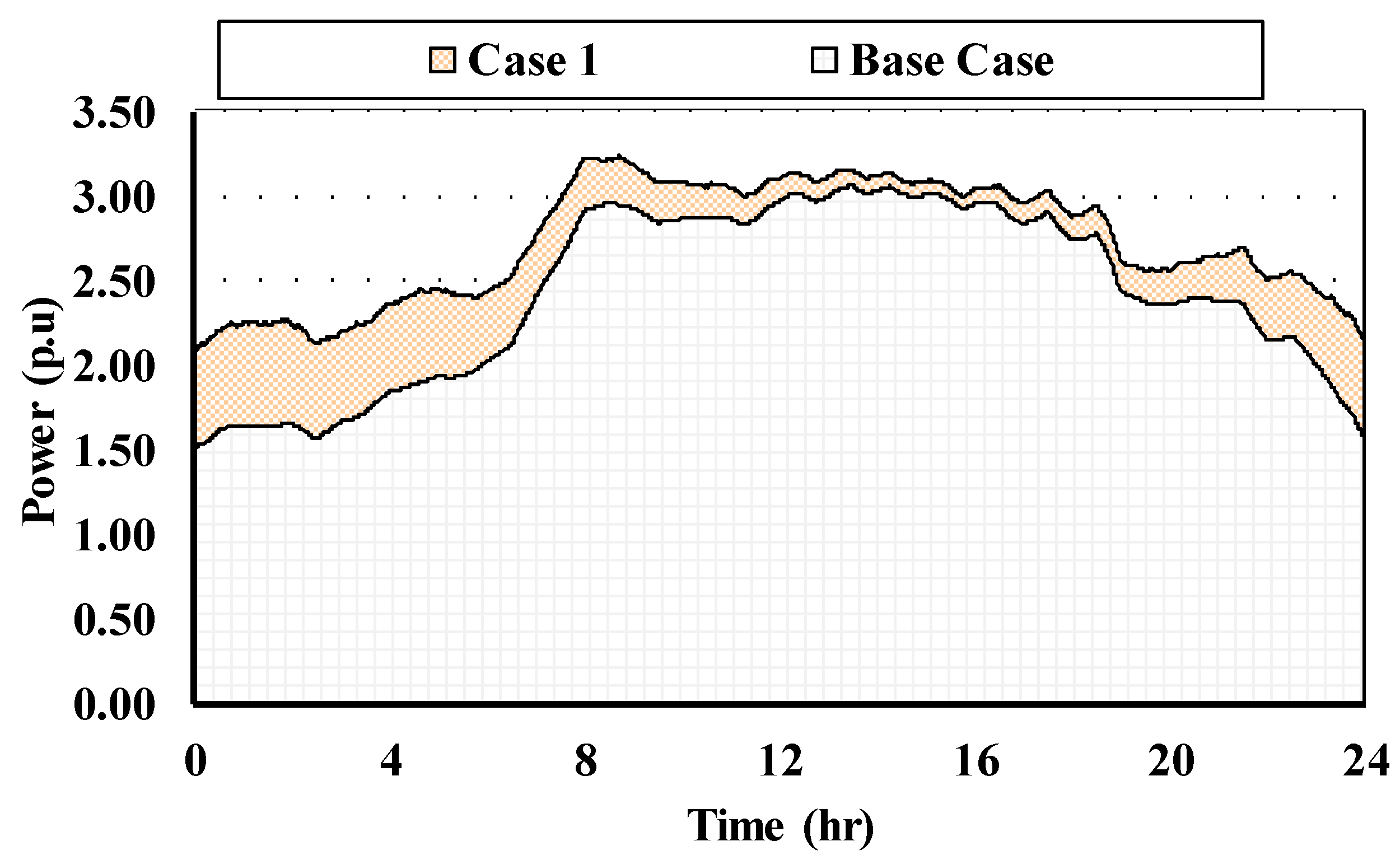
- Case 1: (Uncontrolled EVs Charging) in this case, a statistical model [11] is used to present the impact of EV charging with the classical loads of the distribution system.
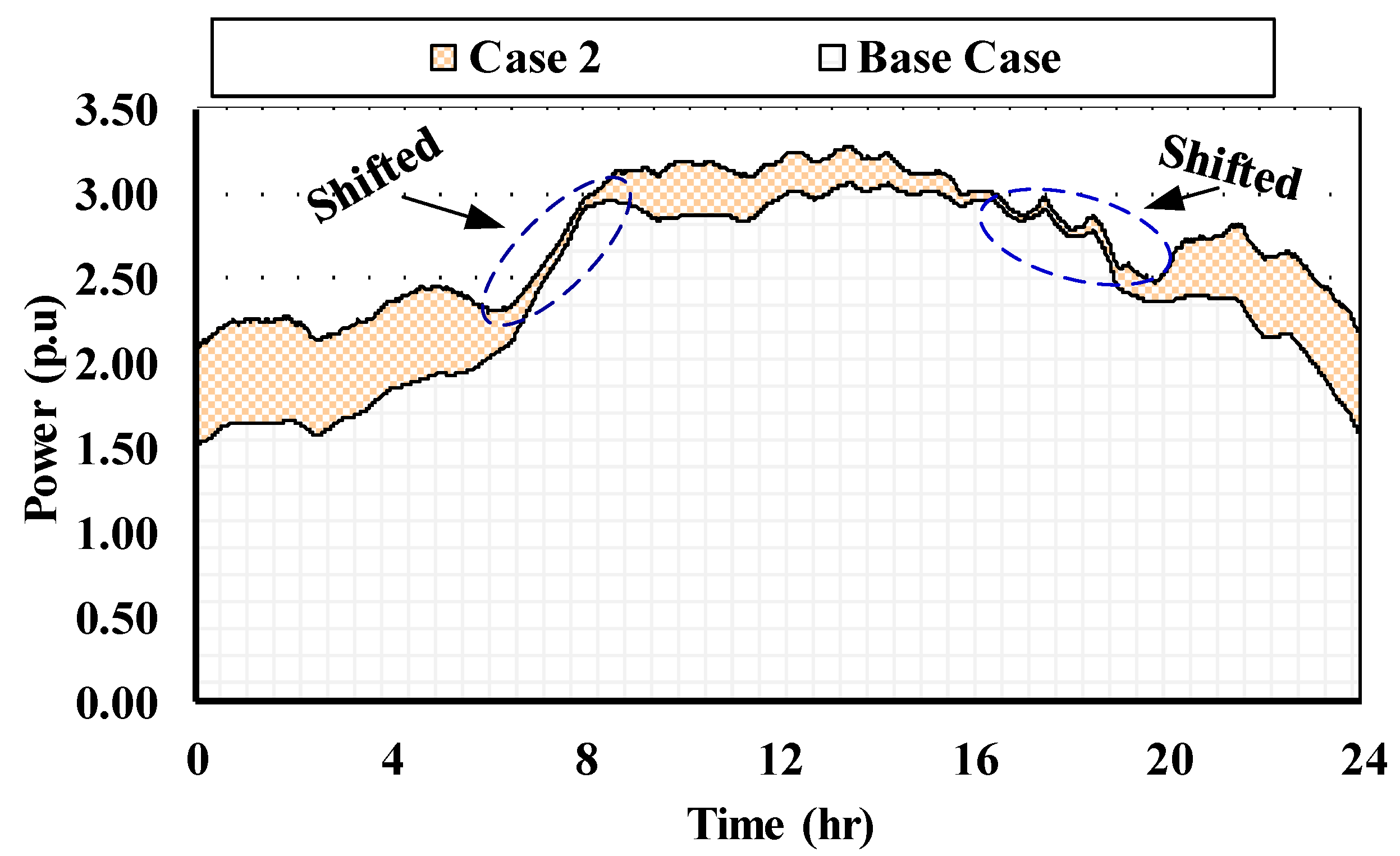
- Case 2: (Controlled EVs Charging) DSM based on queueing theory is used to manage the EVs charging demand with consideration of owner preferences.
- Case 3: Wind power generation is integrated to show its influence on the ETR and the total demand.
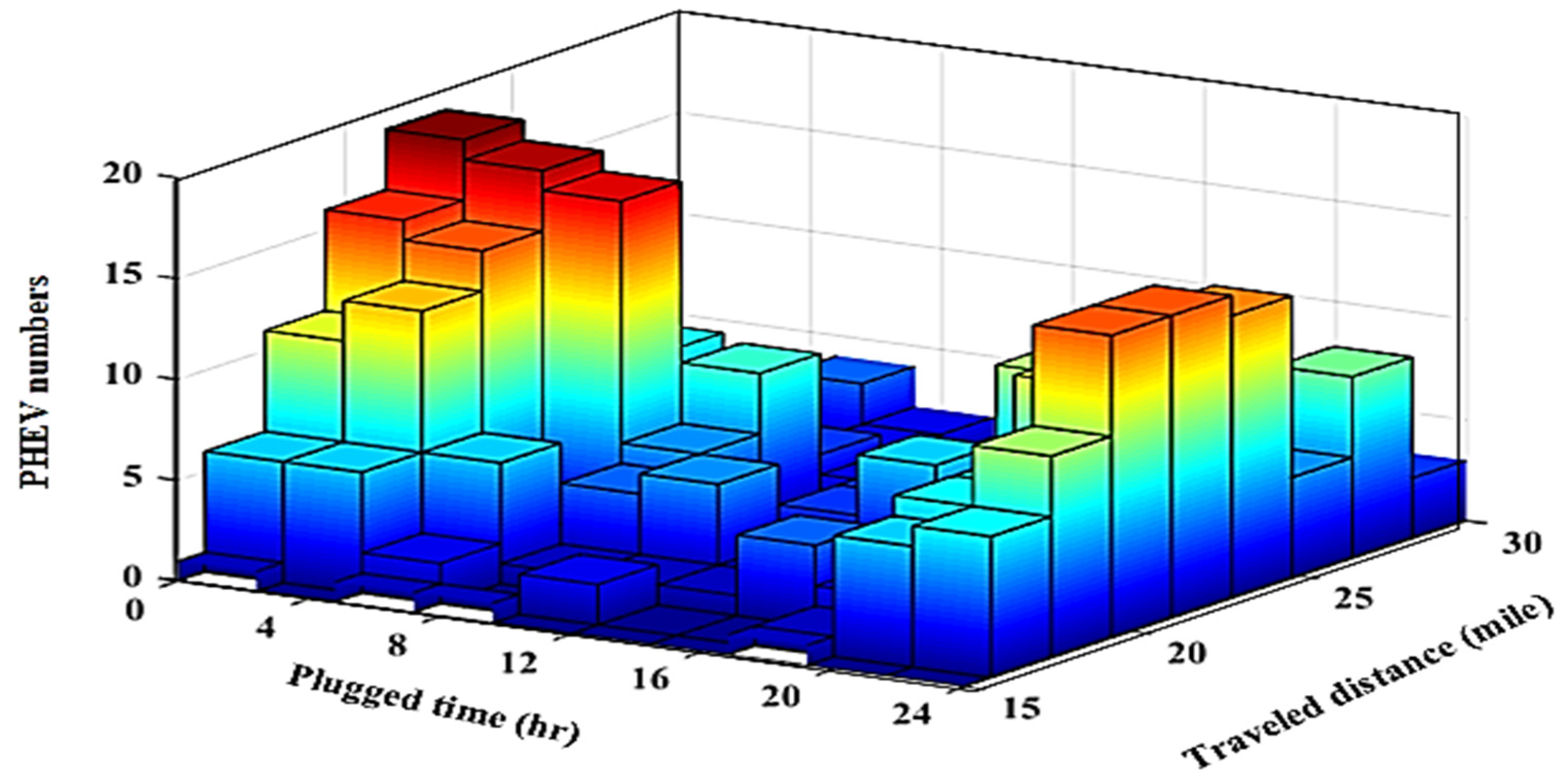
4.2. Generation of Case Datasets
4.3. Case 1 Results (Uncontrolled EVs Charging)
4.4. Case 2 Results (Owner Preferences)
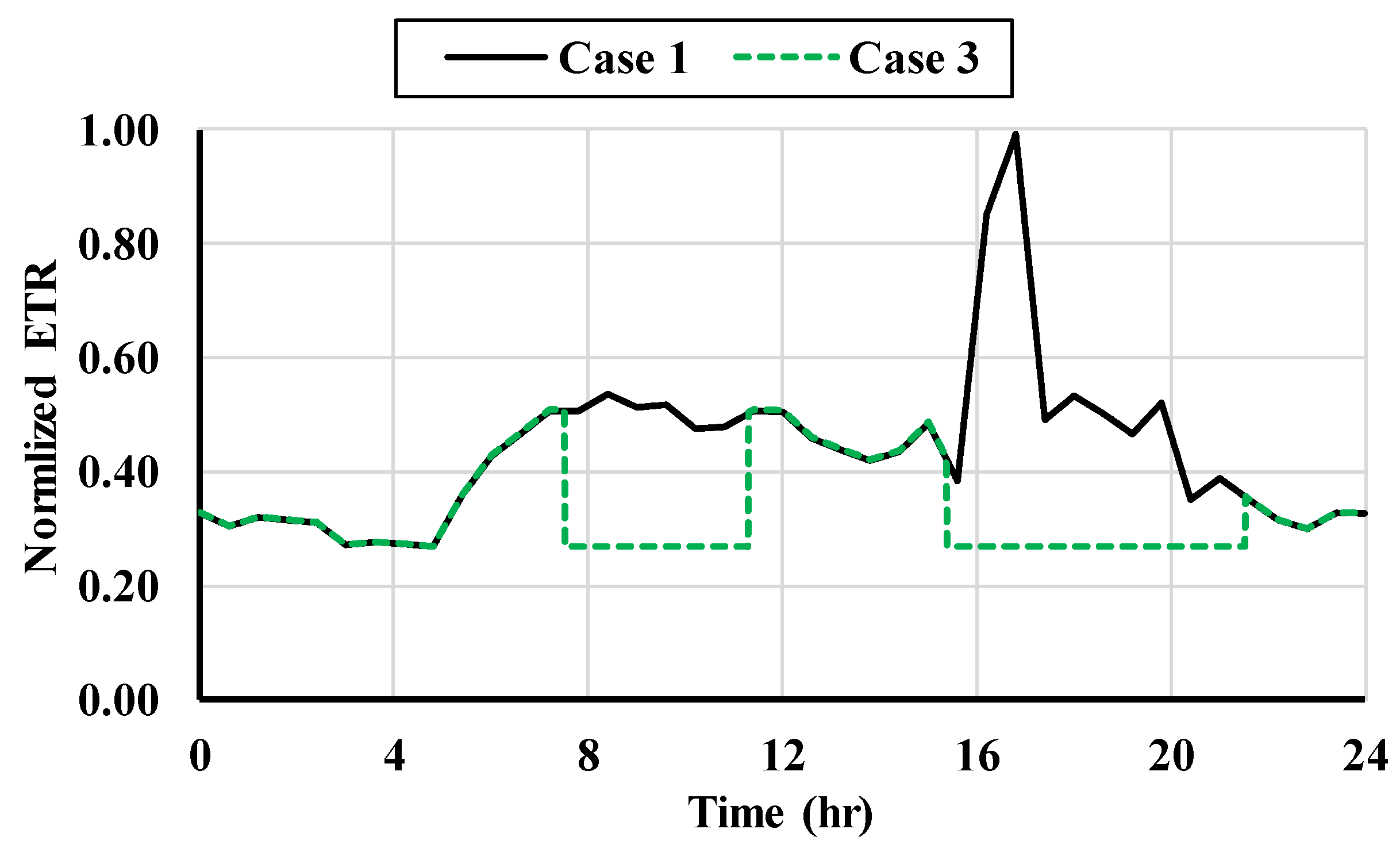
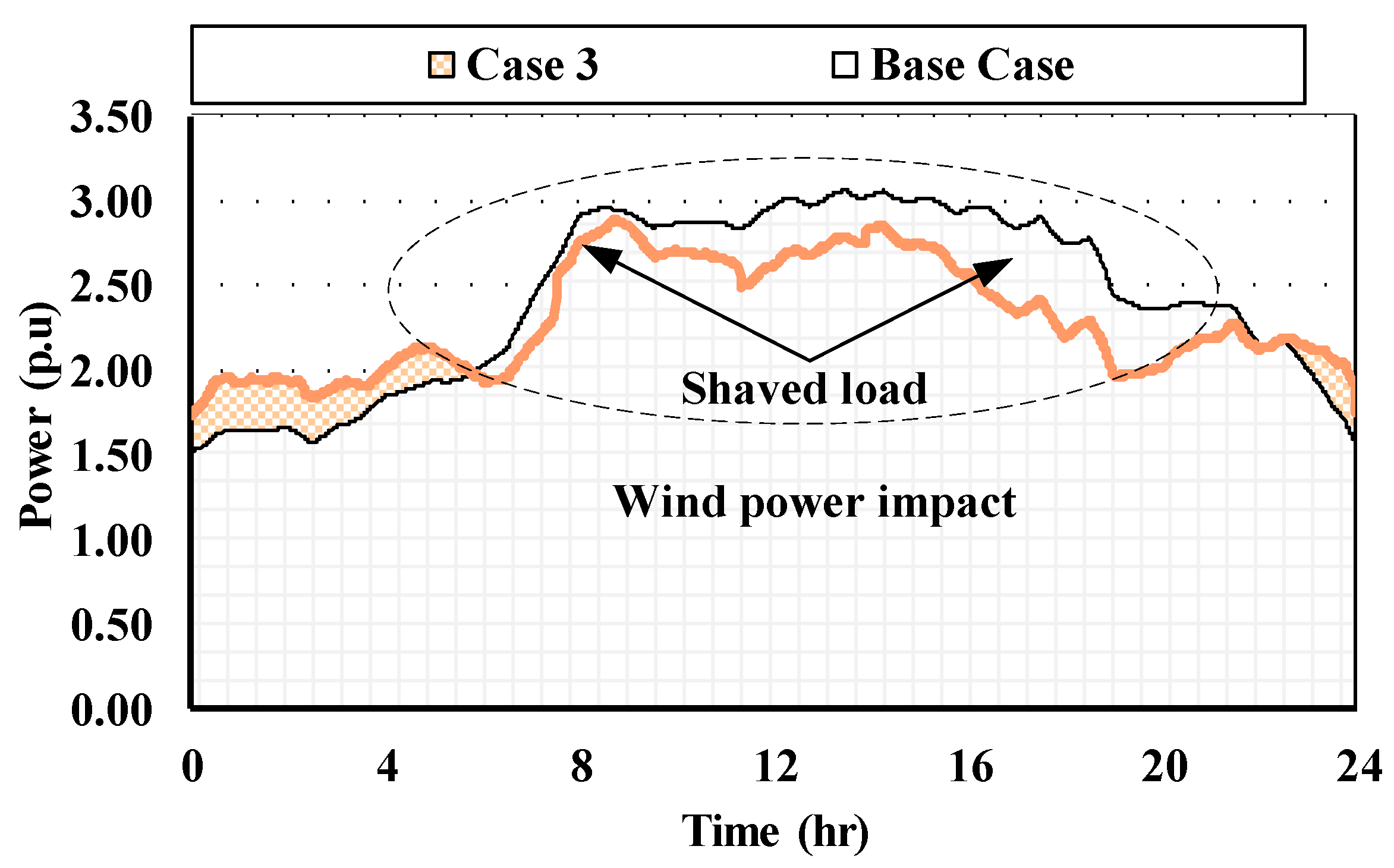
4.5. Case 3 (Wind Power Impact)
4.5.1. Impact of Wind Power on ETR
4.5.2. Case 3 Results
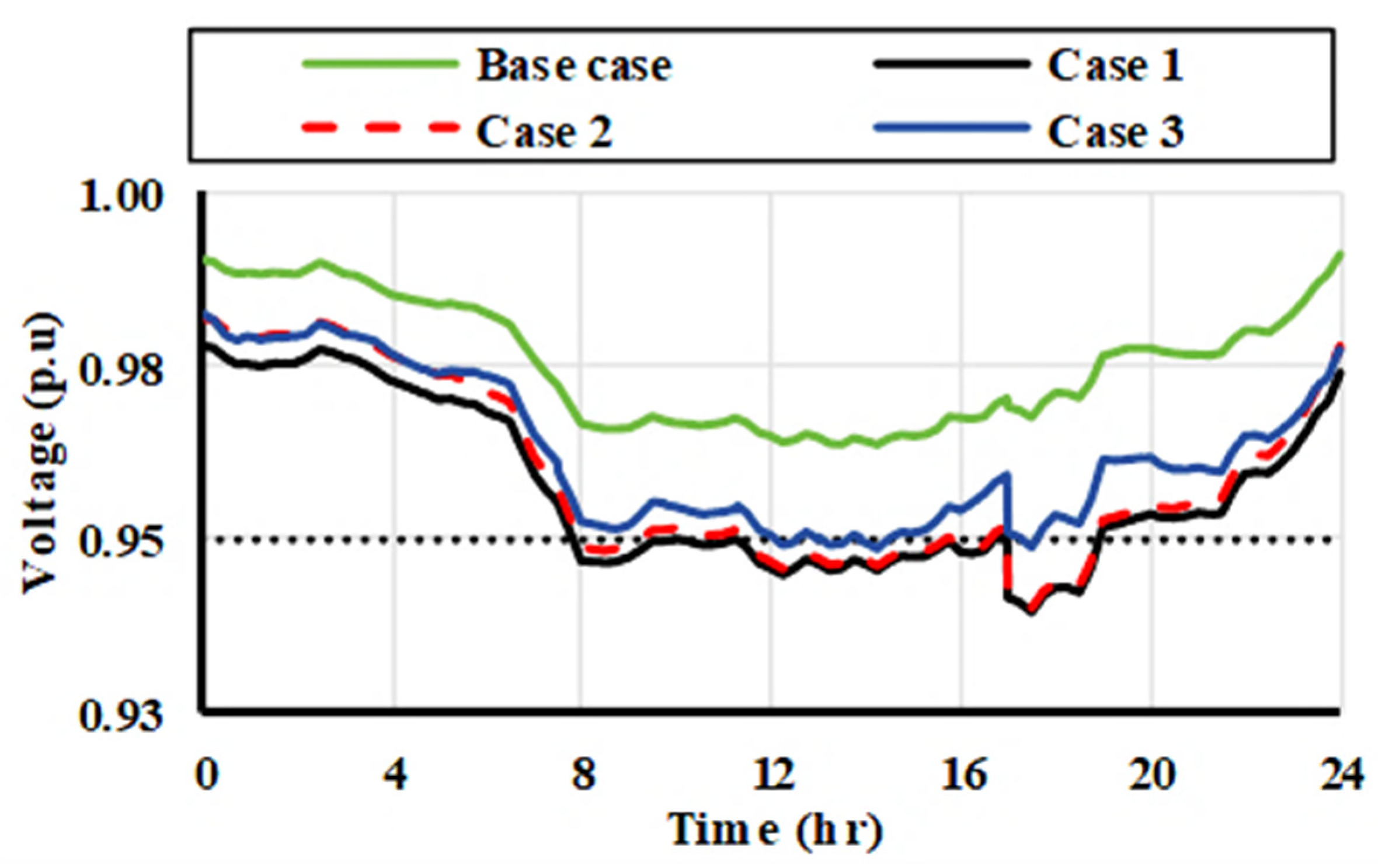
4.6. Voltage Profile Results
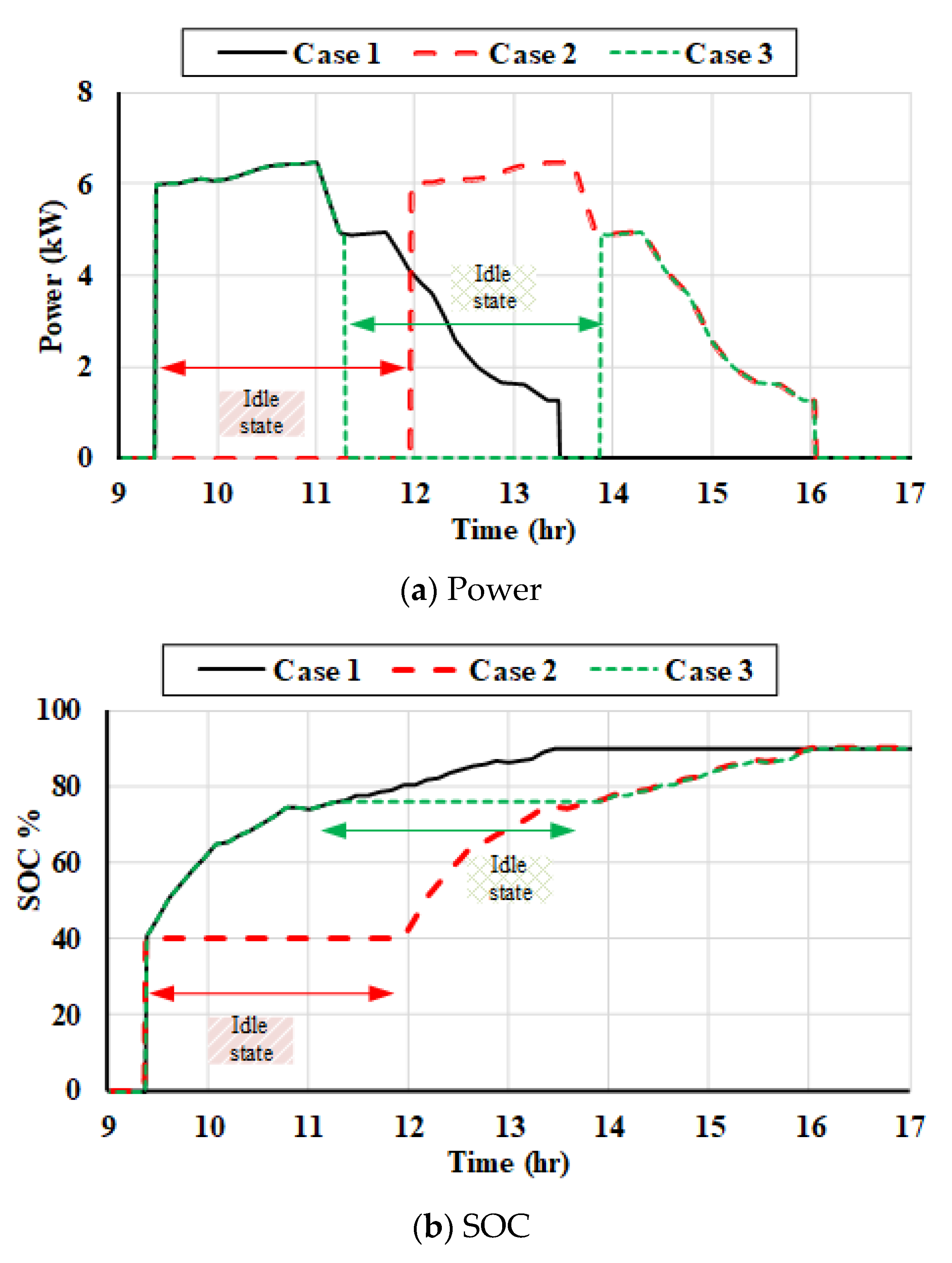
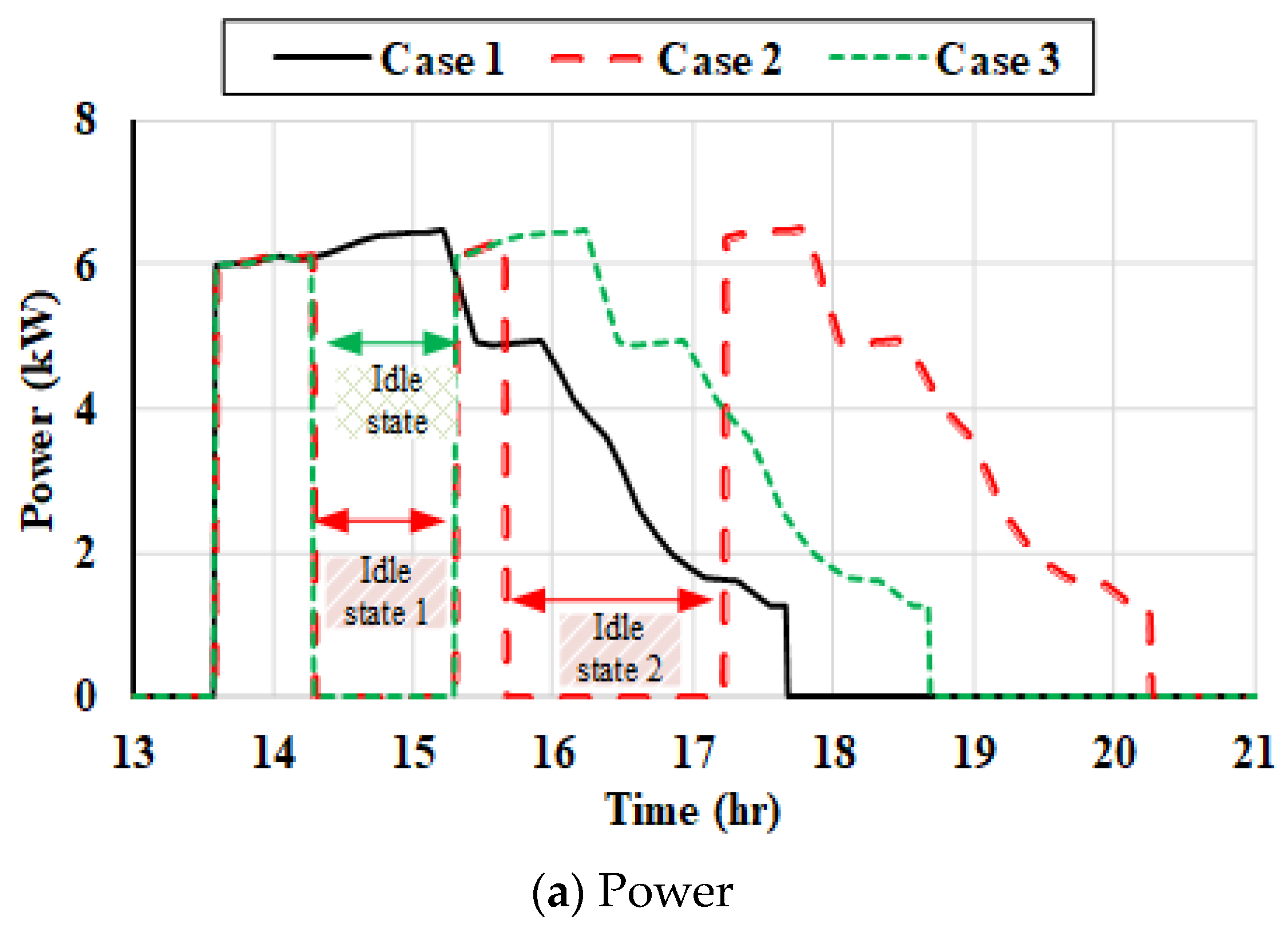
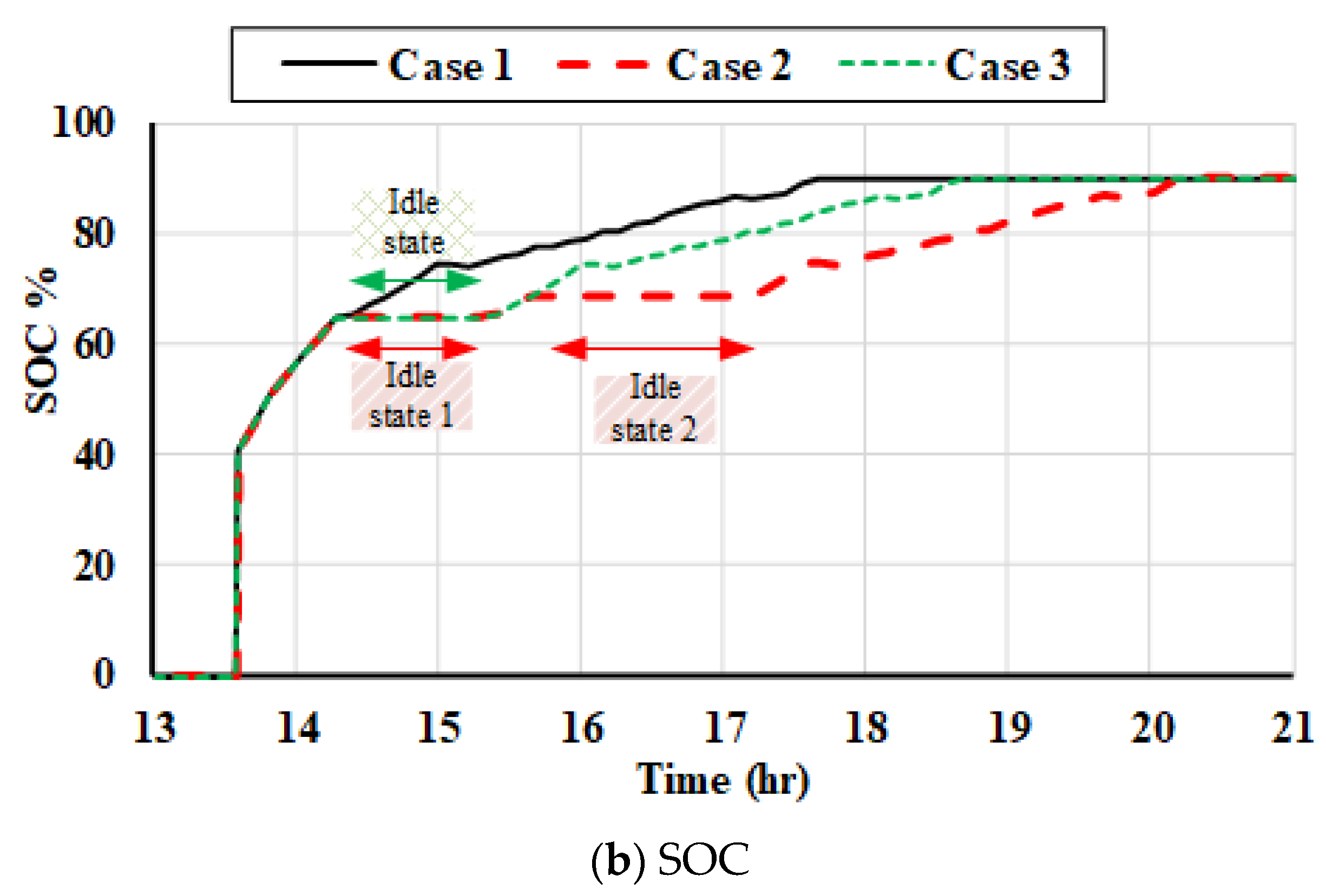
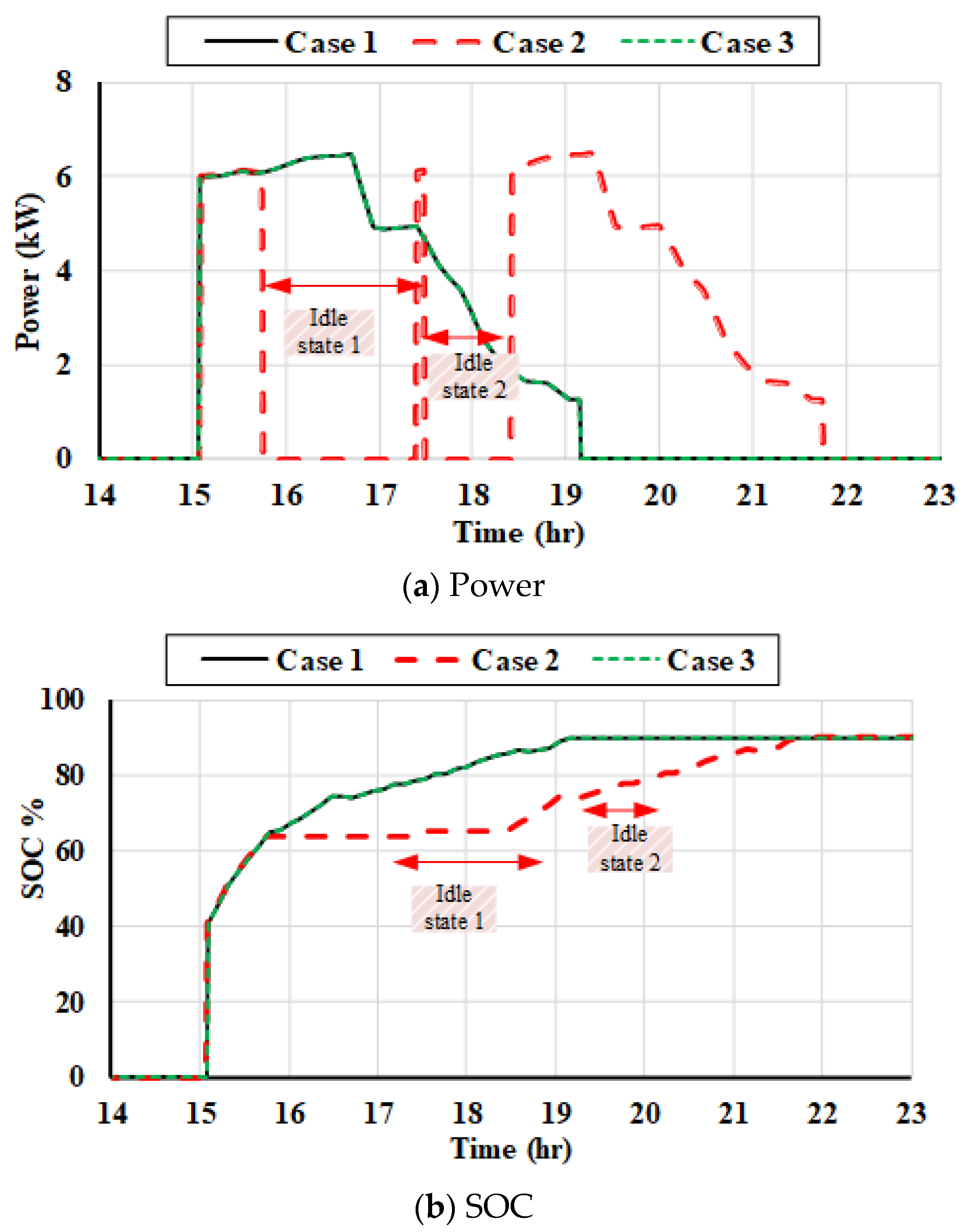
4.7. EVS Charging Behavior
4.8. Impact of DSM on Owner Satisfaction
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Rietmann, N.; Hügler, B.; Lieven, T. Forecasting the trajectory of electric vehicle sales and the consequences for worldwide CO2 emissions. J. Clean. Prod. 2020, 261, 121038. [Google Scholar] [CrossRef]
- Saber, A.Y.; Venayagamoorthy, G.K. Plug-in vehicles and renewable energy sources for cost and emission reductions. IEEE Trans. Ind. Electron. 2011, 58, 1229–1238. [Google Scholar] [CrossRef]
- Alinejad, M.; Rezaei, O.; Kazemi, A.; Bagheri, S. An Optimal Management for Charging and Discharging of Electric Vehicles in an Intelligent Parking Lot Considering Vehicle Owner’s Random Behaviors. J. Energy Storage 2021, 35, 102245. [Google Scholar] [CrossRef]
- Darabi, Z.; Ferdowsi, M. Impact of Plug-In Hybrid Electric Vehicles on Electricity Demand Profile. In Smart Power Grids 2011; Springer: Berlin/Heidelberg, Germany, 2012; pp. 319–349. [Google Scholar]
- Das, H.; Rahman, M.; Li, S.; Tan, C. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Hafez, O.; Bhattacharya, K. Queuing analysis based PEV load modeling considering battery charging behavior and their impact on distribution system operation. IEEE Trans. Smart Grid 2018, 9, 261–273. [Google Scholar] [CrossRef]
- Rigas, E.S.; Ramchurn, S.D.; Bassiliades, N. Managing electric vehicles in the smart grid using artificial intelligence: A survey. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1619–1635. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Qian, K.; Zhou, C.; Stewart, B.G.; Hepburn, D.M. A methodology for optimization of power systems demand due to electric vehicle charging load. IEEE Trans. Power Syst. 2012, 27, 1628–1636. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Ayyadi, S.; Bilil, H.; Maaroufi, M. Optimal charging of Electric Vehicles in residential area. Sustain. Energy Grids Netw. 2019, 19, 100240. [Google Scholar] [CrossRef]
- Said, D.; Mouftah, H.T. A novel electric vehicles charging/discharging management protocol based on queuing model. IEEE Trans. Intell. Veh. 2019, 5, 100–111. [Google Scholar] [CrossRef]
- Wu, D.; Radhakrishnan, N.; Huang, S. A hierarchical charging control of plug-in electric vehicles with simple flexibility model. Appl. Energy 2019, 253, 113490. [Google Scholar] [CrossRef]
- Su, J.; Lie, T.; Zamora, R. Modelling of large-scale electric vehicles charging demand: A New Zealand case study. Electr. Power Syst. Res. 2019, 167, 171–182. [Google Scholar] [CrossRef]
- Razipour, R.; Moghaddas-Tafreshi, S.-M.; Farhadi, P. Optimal management of electric vehicles in an intelligent parking lot in the presence of hydrogen storage system. J. Energy Storage 2019, 22, 144–152. [Google Scholar] [CrossRef]
- Selim, A.; Abdel-Akher, M.; Aly, M.M. Plug-in hybrid electric vehicles aggregation and real-time active power control simulation analysis in distribution systems. In Proceedings of the 2016 18th International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; IEEE: New York, NY, USA, 2016; pp. 723–728. [Google Scholar]
- Masoum, A.S.; Deilami, S.; Moses, P.S.; Masoum, M.A.; Abu-Siada, A. Smart load management of plug-in electric vehicles in distribution and residential networks with charging stations for peak shaving and loss minimisation considering voltage regulation. Gener. Transm. Distrib. IET 2011, 5, 877–888. [Google Scholar] [CrossRef]
- Liu, C.; Wang, J.; Botterud, A.; Zhou, Y.; Vyas, A. Assessment of impacts of PHEV charging patterns on wind-thermal scheduling by stochastic unit commitment. IEEE Trans. Smart Grid 2012, 3, 675–683. [Google Scholar] [CrossRef]
- Figenbaum, E. Battery Electric Vehicle Fast Charging—Evidence from the Norwegian Market. World Electr. Veh. J. 2020, 11, 38. [Google Scholar] [CrossRef]
- Taylor, J.; Maitra, A.; Alexander, M.; Brooks, D.; Duvall, M. Evaluations of plug-in electric vehicle distribution system impacts. In Proceedings of the 2010 IEEE Power and Energy Society General Meeting (PESGM 10), Minneapolis, MN, USA, 25–29 July 2010; IEEE: New York, NY, USA, 2010; pp. 1–6. [Google Scholar]
- Shao, S.; Pipattanasomporn, M.; Rahman, S. Challenges of PHEV Penetration to the Residential Distribution Network. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting (PESGM 09), Cagary, AB, Canada, 26–29 July 2009; IEEE: New York, NY, USA, 2009; pp. 1–8. [Google Scholar]
- Rautiainen, A.; Repo, S.; Jarventausta, P.; Mutanen, A.; Vuorilehto, K.; Jalkanen, K. Statistical charging load modeling of PHEVs in electricity distribution networks using national travel survey data. IEEE Trans. Smart Grid 2012, 3, 1650–1659. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the impacts of plug-in hybrid electric vehicles on power distribution systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Green, R.C.; Wang, L.; Alam, M.; Depuru, S.S.S.R. Evaluating the Impact of Plug-In Hybrid Electric Vehicles on Composite Power System Reliability. In Proceedings of the North American Power Symposium (NAPS), Boston, MA, USA, 4–6 August 2011; IEEE: New York, NY, USA, 2011; pp. 1–7. [Google Scholar]
- El Nozahy, M.S.; Salama, M.M. A comprehensive study of the impacts of PHEVs on residential distribution networks. IEEE Trans. Sustain. Energy 2014, 5, 332–342. [Google Scholar] [CrossRef]
- Gong, Q.; Midlam-Mohler, S.; Serra, E.; Marano, V.; Rizzoni, G. PEV Charging Control Considering Transformer Life and Experimental Validation of a 25 kVA Distribution Transformer. IEEE Trans. Smart Grid 2015, 6, 648–656. [Google Scholar] [CrossRef]
- Jia, Q.-S.; Long, T. A review on charging behavior of electric vehicles: Data, model, and control. Control Theory Technol. 2020, 18, 217–230. [Google Scholar] [CrossRef]
- Abbasi, M.H.; Taki, M.; Rajabi, A.; Li, L.; Zhang, J. Coordinated operation of electric vehicle charging and wind power generation as a virtual power plant: A multi-stage risk constrained approach. Appl. Energy 2019, 239, 1294–1307. [Google Scholar] [CrossRef]
- Ireshika, M.A.S.T.; Preissinger, M.; Kepplinger, P. Autonomous Demand Side Management of Electric Vehicles in a Distribution Grid. In Proceedings of the 7th International Youth Conference on Energy (IYCE), Bled, Slovenia, 3–6 July 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Wang, Y.; Yang, Z.; Mourshed, M.; Guo, Y.; Niu, Q.; Zhu, X. Demand side management of plug-in electric vehicles and coordinated unit commitment: A novel parallel competitive swarm optimization method. Energy Convers. Manag. 2019, 196, 935–949. [Google Scholar] [CrossRef] [Green Version]
- Sarkis, G.; Georges, S.; Slaoui, F.H. A Novel Algorithm for Smart Grids-Optimal Load Scheduling. Int. Rev. Model. Simul. 2018, 11, 67. [Google Scholar] [CrossRef]
- Chang, T.H.; Alizadeh, M.; Scaglione, A. Real-Time Power Balancing Via Decentralized Coordinated Home Energy Scheduling. IEEE Trans. Smart Grid 2013, 4, 1490–1504. [Google Scholar] [CrossRef] [Green Version]
- Strbac, G. Demand side management: Benefits and challenges. Energy Policy 2008, 36, 4419–4426. [Google Scholar] [CrossRef]
- Mou, Y.; Xing, H.; Lin, Z.; Fu, M. Decentralized optimal demand-side management for PHEV charging in a smart grid. IEEE Trans. Smart Grid 2015, 6, 726–736. [Google Scholar] [CrossRef]
- Mohamed, A.; Salehi, V.; Ma, T.; Mohammed, O. Real-time energy management algorithm for plug-in hybrid electric vehicle charging parks involving sustainable energy. IEEE Trans. Sustain. Energy 2014, 5, 577–586. [Google Scholar] [CrossRef]
- Nafisi, H.; Agah, S.M.M.; Abyaneh, H.A.; Abedi, M. Two-stage optimization method for energy loss minimization in microgrid based on smart power management scheme of PHEVs. IEEE Trans. Smart Grid 2016, 7, 1268–1276. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, D.; Jia, H.; Djilali, N.; Zhang, W. Aggregation and bidirectional charging power control of plug-in hybrid electric vehicles: Generation system adequacy analysis. IEEE Trans. Sustain. Energy 2015, 6, 325–335. [Google Scholar] [CrossRef]
- Bae, S.; Kwasinski, A. Spatial and temporal model of electric vehicle charging demand. IEEE Trans. Smart Grid 2012, 3, 394–403. [Google Scholar] [CrossRef]
- Li, G.; Zhang, X.-P. Modeling of plug-in hybrid electric vehicle charging demand in probabilistic power flow calculations. IEEE Trans. Smart Grid 2012, 3, 492–499. [Google Scholar] [CrossRef]
- Hirth, L. The market value of variable renewables: The effect of solar wind power variability on their relative price. Energy Econ. 2013, 38, 218–236. [Google Scholar] [CrossRef] [Green Version]
- Ketterer, J.C. The impact of wind power generation on the electricity price in Germany. Energy Econ. 2014, 44, 270–280. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Xiang, Y.; Lyu, L.; Ji, C.; Zhang, Q.; Teng, F.; Liu, Y. Price Incentive based Charging Navigation Strategy for Electric Vehicles. IEEE Trans. Ind. Appl. 2020, 56, 5762–5774. [Google Scholar] [CrossRef]
- Gao, S.; Jia, H. Integrated Configuration and Optimization of Electric Vehicle Aggregators for Charging Facilities in Power Networks With Renewables. IEEE Access 2019, 7, 84690–84700. [Google Scholar] [CrossRef]
- Abdel-Akher, M.; Selim, A.; Aly, M.M. Initialised load-flow analysis based on Lagrange polynomial approximation for efficient quasi-static time-series simulation. IET Gener. Transm. Distrib. 2015, 9, 2768–2774. [Google Scholar] [CrossRef]
- Selim, A.; Abdel-Akher, M.; Aly, M.M.; Kamel, S.; Senjyu, T. Fast quasi-static time-series analysis and reactive power control of unbalanced distribution systems. Int. Trans. Electr. Energy Syst. 2019, 29, e2673. [Google Scholar] [CrossRef] [Green Version]
- Gnedenko, B.; Kovalenko, I. Introduction to Queuing Theory. Mathematical Modeling; Birkhaeuser: Boston, MA, USA, 1989. [Google Scholar]
- Nelson, R. Probability, Stochastic Processes, and Queueing Theory: The Mathematics of Computer Performance Modeling; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Rozanov, Y.A. Markov random fields. In Markov Random Fields; Springer: New York, NY, USA, 1982; pp. 55–102. [Google Scholar]
- Kersting, W.H. Radial Distribution Test Feeders. In Proceedings of the Power Engineering Society Winter Meeting, Columbus, OH, USA, 28 January–1 February 2001; IEEE: New York, NY, USA, 2001; pp. 908–912. [Google Scholar]
- National Travel Survey. Available online: https://www.gov.uk/government/uploads/system/uploads/attachment_data/file/8932/nts2010-01.pdf (accessed on 1 June 2021).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|---|
| Component | |||||||
| Probability | 0.068 | 0.170 | 0.212 | 0.177 | 0.147 | 0.123 | 0.102 |
| Control Variable | EV#i | EV#j | EV#k |
|---|---|---|---|
| Initial SOC (%) | 40 | 40 | 40 |
| Initial plugged time (h) | 09:23 | 13:36 | 15:05 |
| EPTD (h) | 8:00 | 10:00 | 8:00 |
| OPR (per unit price) | 0.46 | 0.43 | 0.50 |
| Case 1 | Case 2 | Case 3 | ||
|---|---|---|---|---|
| EV#i | Overall connected time (h) | 04:04 | 06:42 | 06:42 |
| Idle state time (h) | 00:00 | 02:38 | 02:38 | |
| Cost-saving | - | 7.6% | 34.2% | |
| EV#j | Overall connected time (h) | 04:04 | 06:39 | 05:05 |
| Idle state time (h) | 00:00 | 02:35 | 01:01 | |
| Cost-saving | - | 10.6% | 42.1% | |
| EV#k | Overall connected time (h) | 04:04 | 06:36 | 04:04 |
| Idle state time (h) | 00:00 | 02:32 | 00:00 | |
| Cost-saving | - | 29.8% | 55.4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Selim, A.; Abdel-Akher, M.; Kamel, S.; Jurado, F.; Almohaimeed, S.A. Electric Vehicles Charging Management for Real-Time Pricing Considering the Preferences of Individual Vehicles. Appl. Sci. 2021, 11, 6632. https://0-doi-org.brum.beds.ac.uk/10.3390/app11146632
Selim A, Abdel-Akher M, Kamel S, Jurado F, Almohaimeed SA. Electric Vehicles Charging Management for Real-Time Pricing Considering the Preferences of Individual Vehicles. Applied Sciences. 2021; 11(14):6632. https://0-doi-org.brum.beds.ac.uk/10.3390/app11146632
Chicago/Turabian StyleSelim, Ali, Mamdouh Abdel-Akher, Salah Kamel, Francisco Jurado, and Sulaiman A. Almohaimeed. 2021. "Electric Vehicles Charging Management for Real-Time Pricing Considering the Preferences of Individual Vehicles" Applied Sciences 11, no. 14: 6632. https://0-doi-org.brum.beds.ac.uk/10.3390/app11146632