
Performance Analysis of Fully Actuated Multirotor Unmanned Aerial Vehicle Configurations with Passively Tilted Rotors


Abstract
:1. Introduction
2. Mathematical Representation of Multirotor UAV Configurations
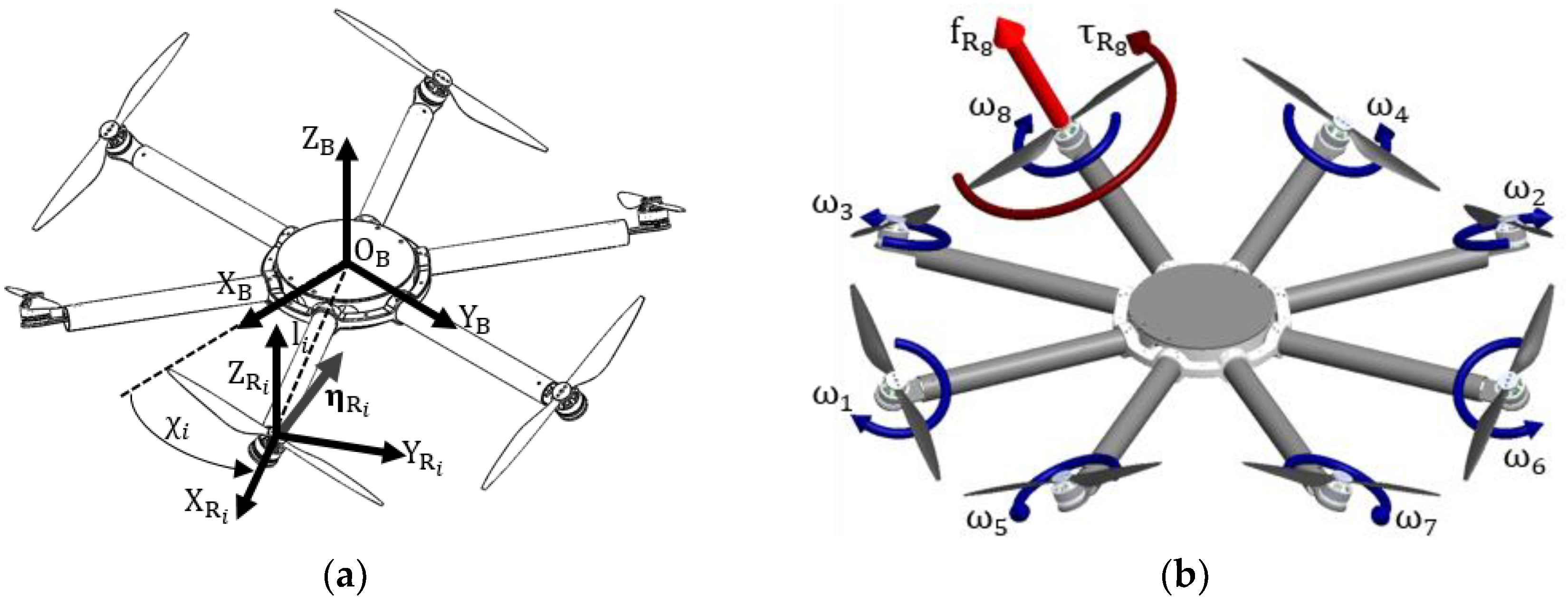
2.1. Dynamics of a Multirotor UAV
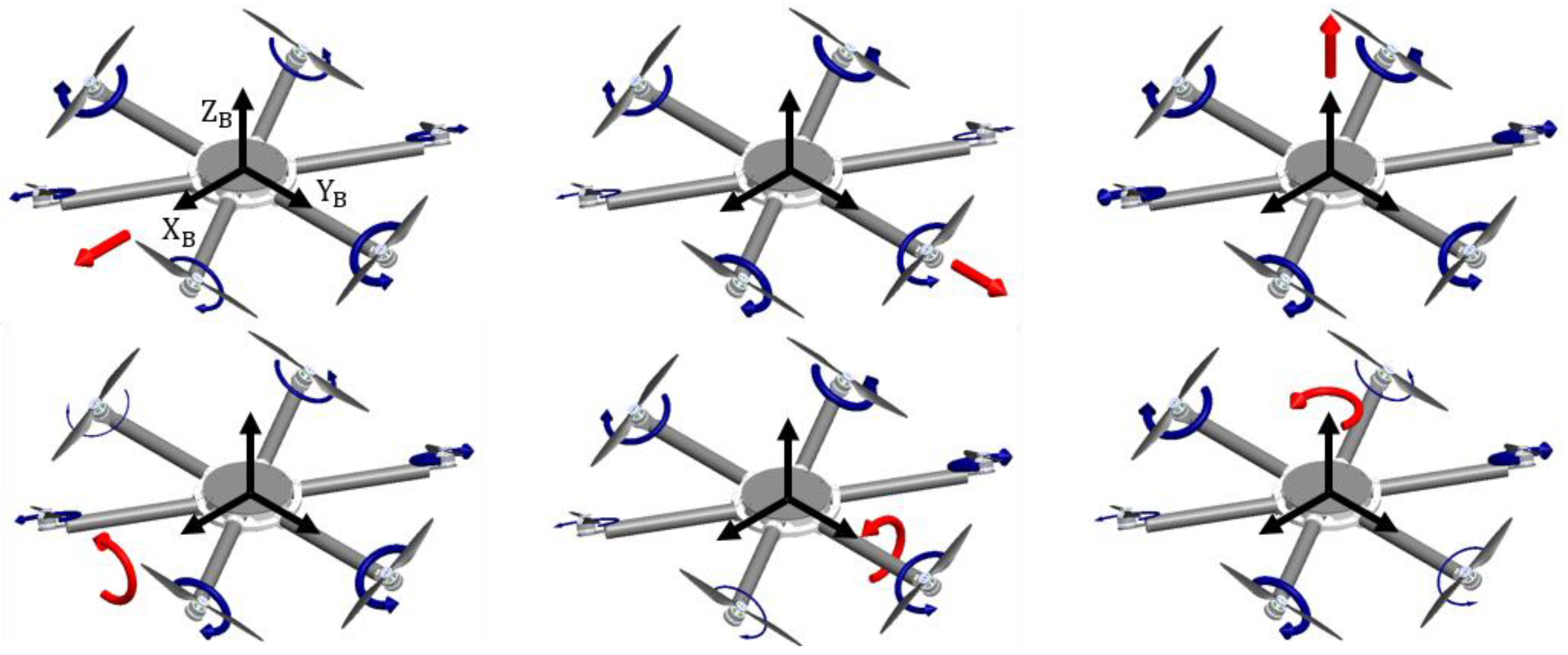
2.2. Multirotor Configuration Control Allocation Scheme
2.3. Inverse Control Allocation Scheme
3. Performance Analysis Procedure and Results
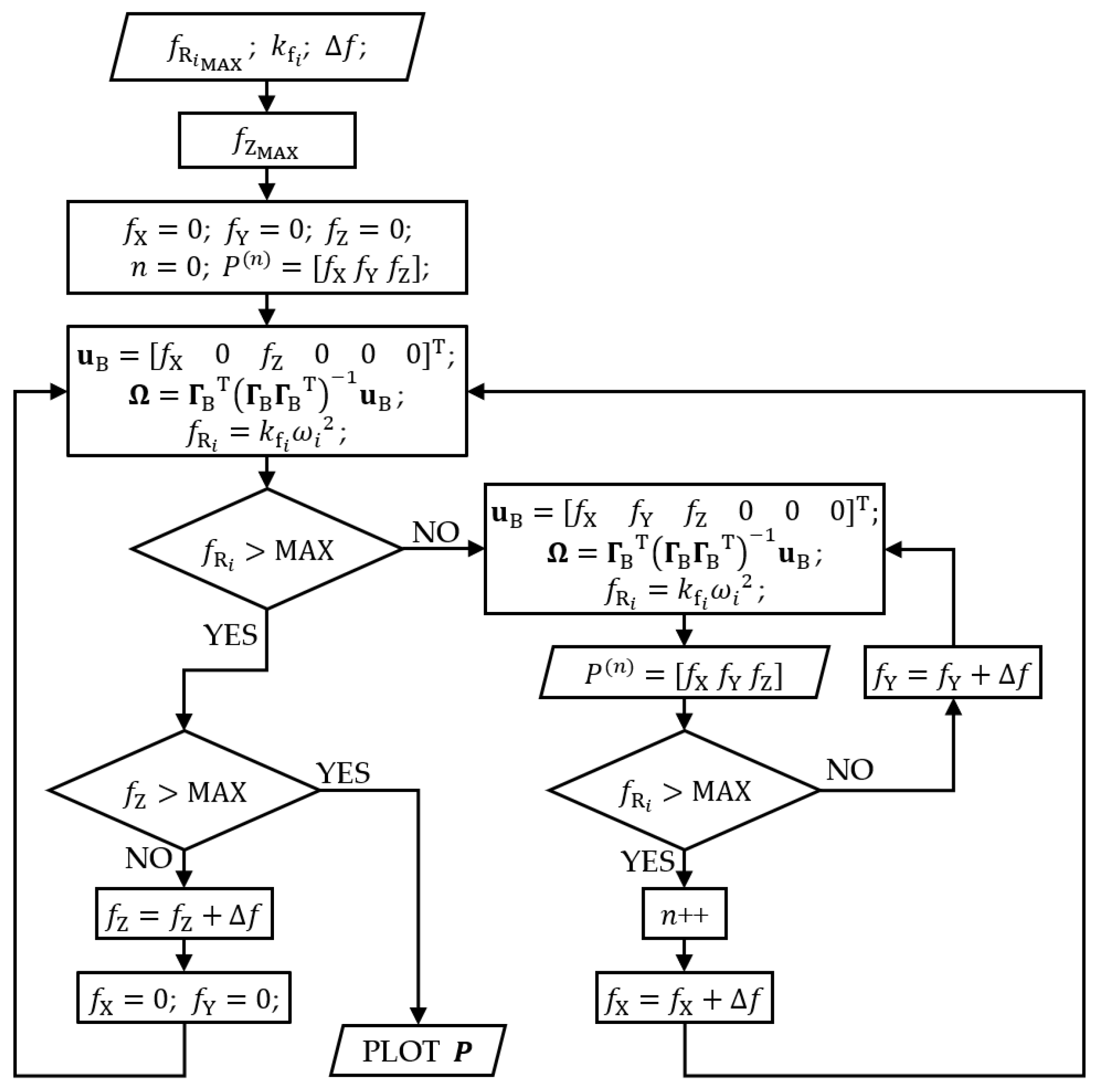
3.1. Performance Analysis Procedure
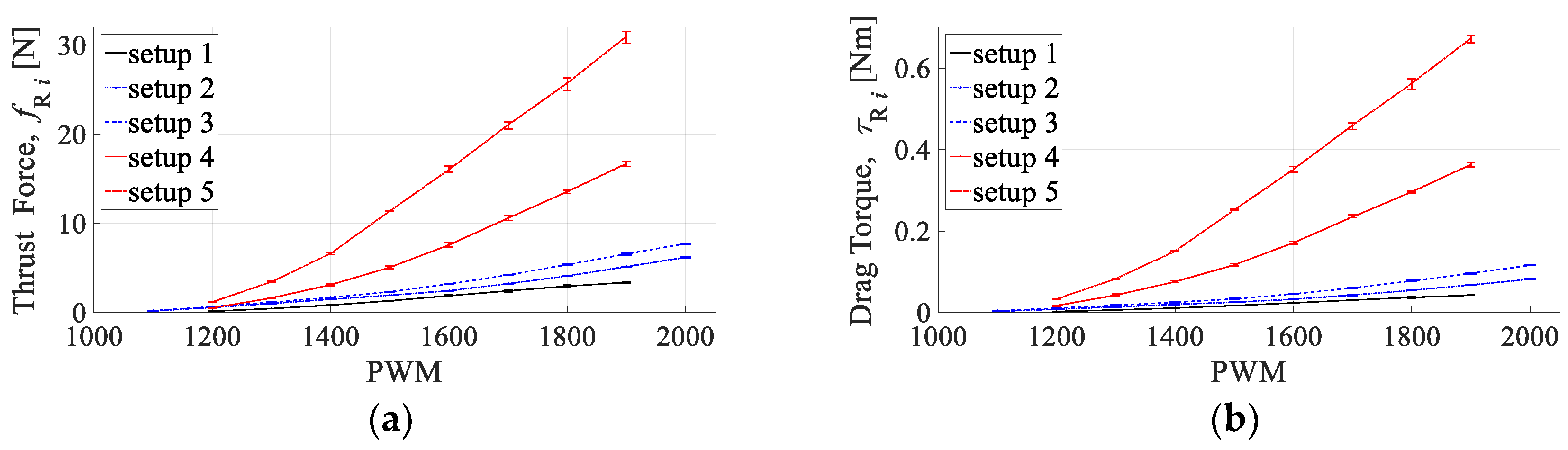
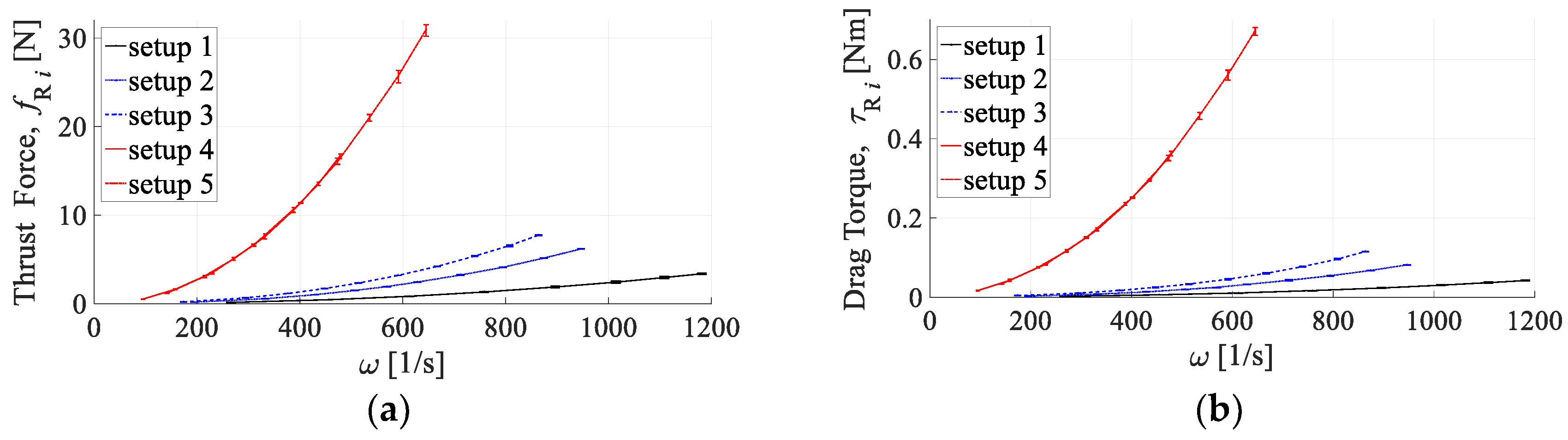
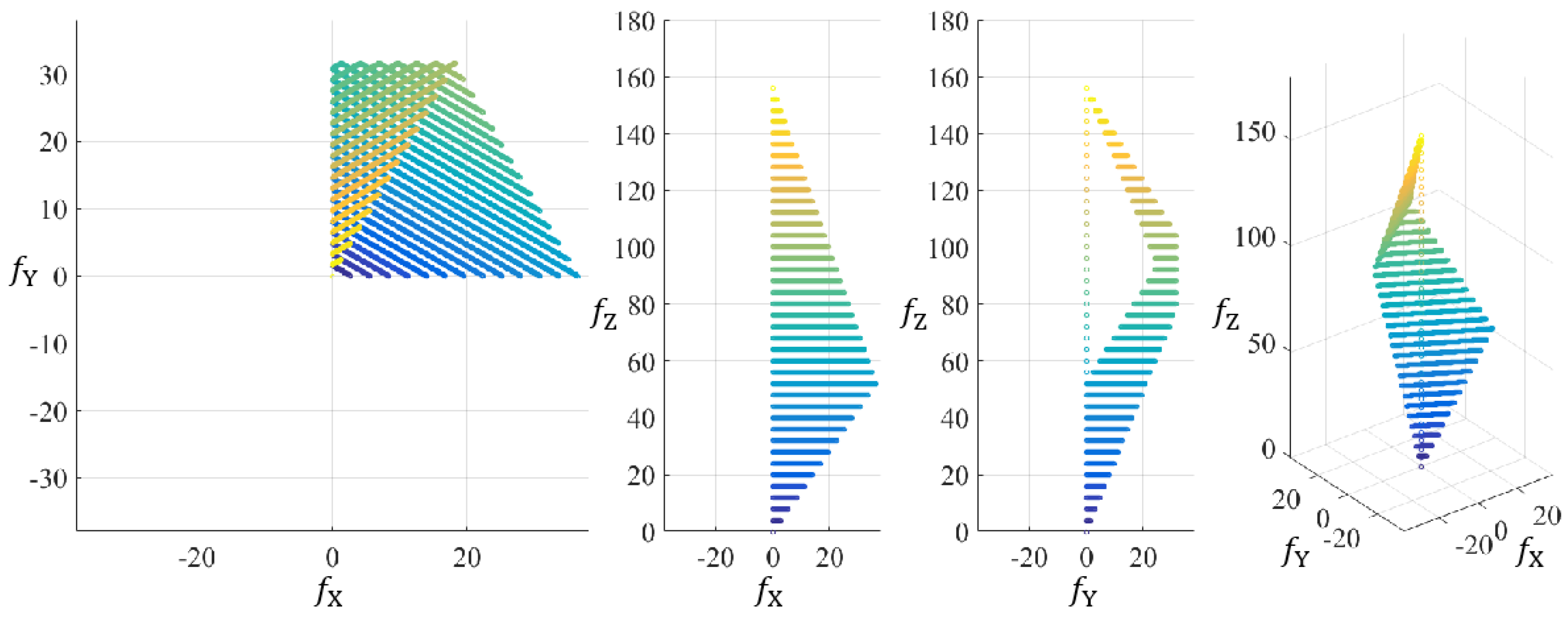
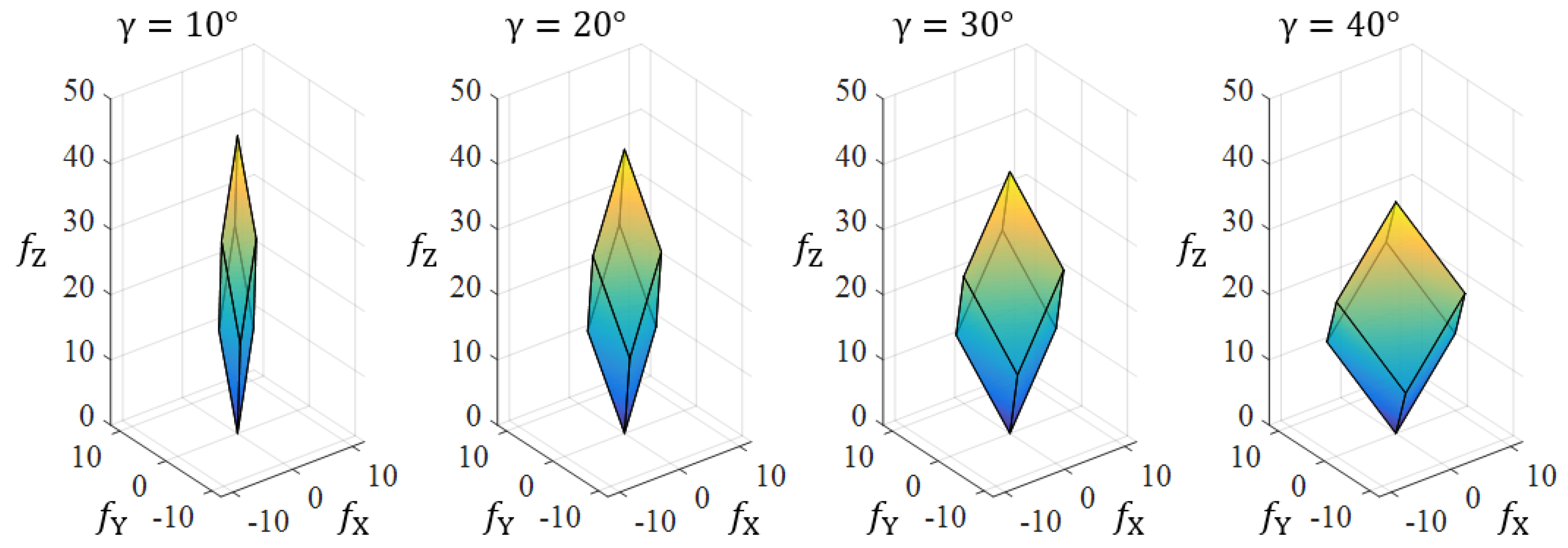
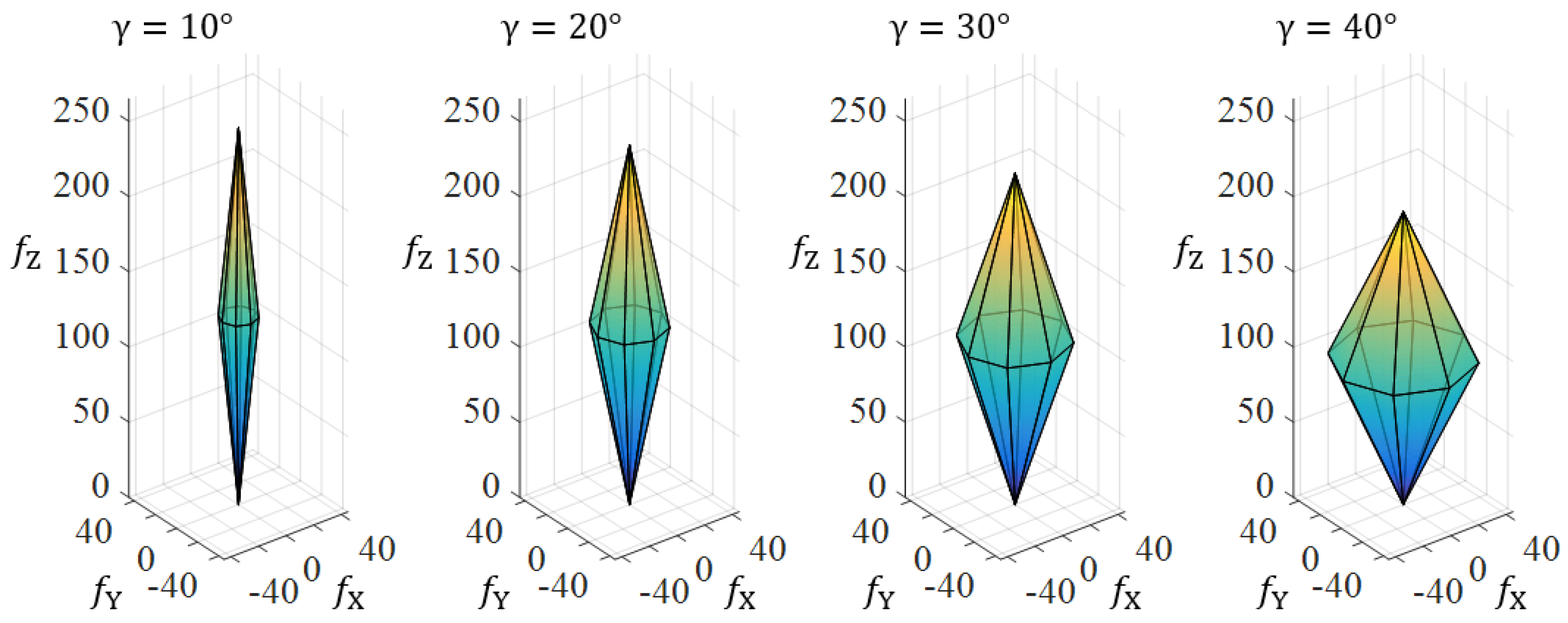
3.2. Results of the Tilt Angle Analysis
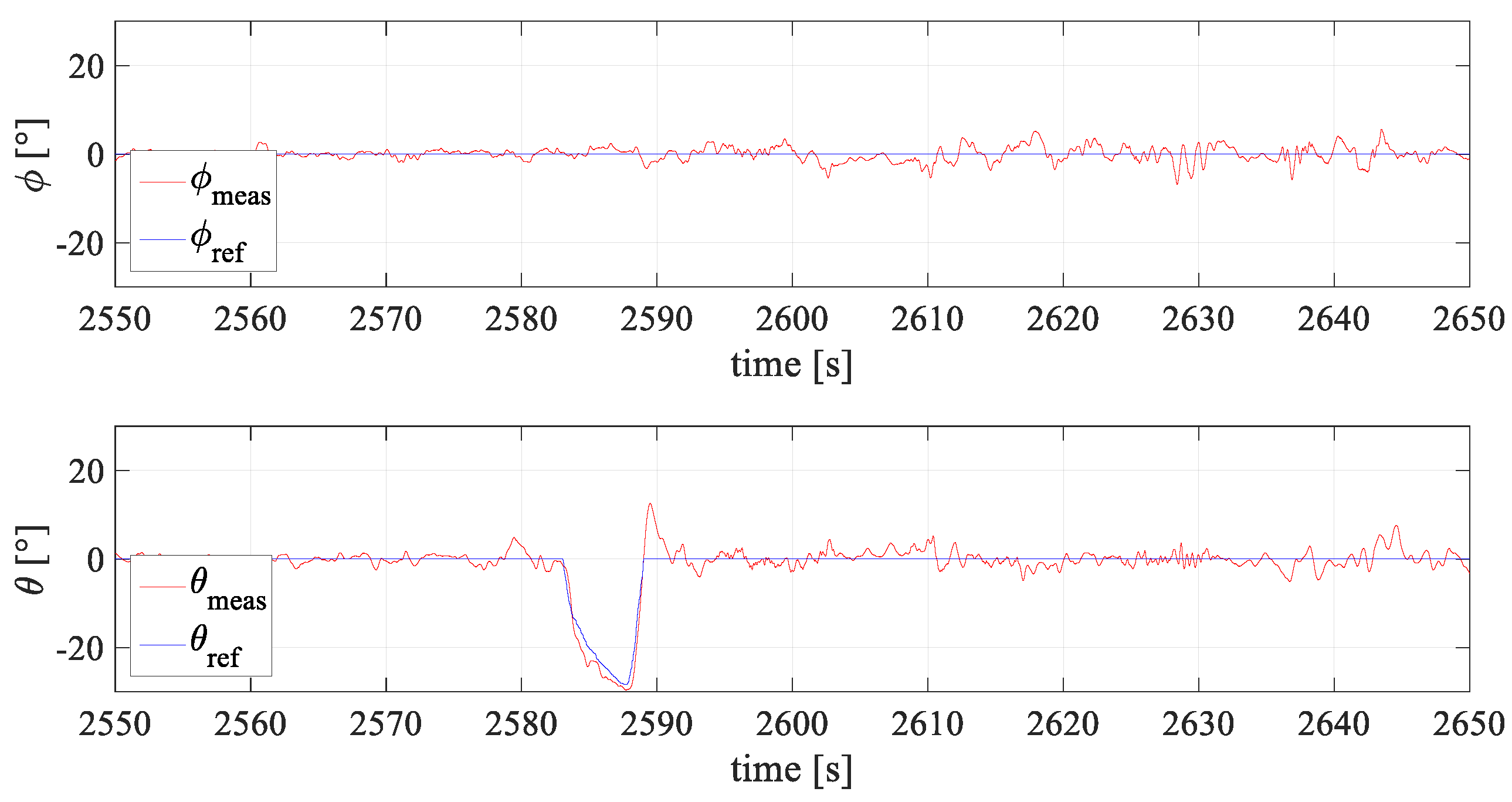
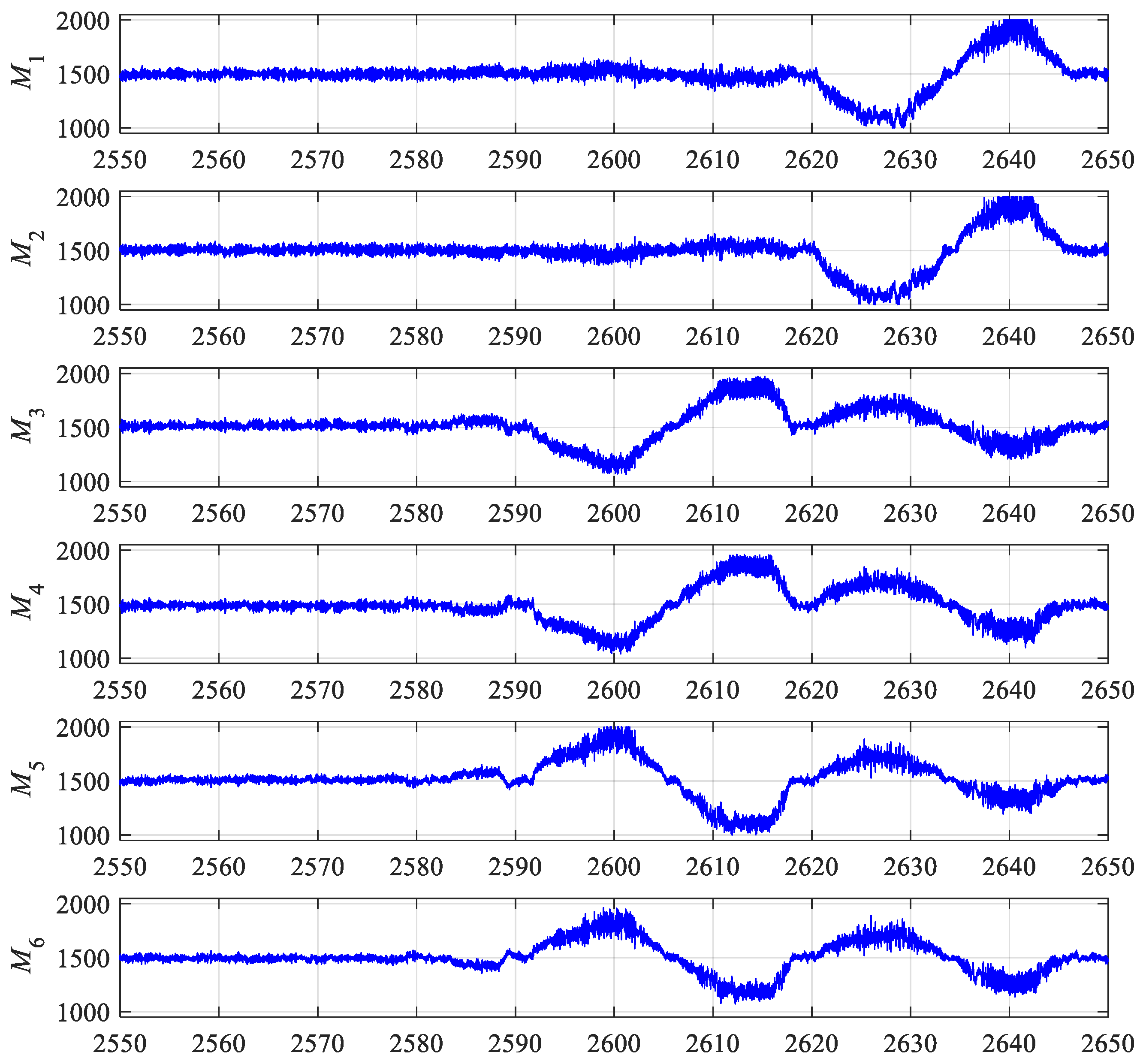
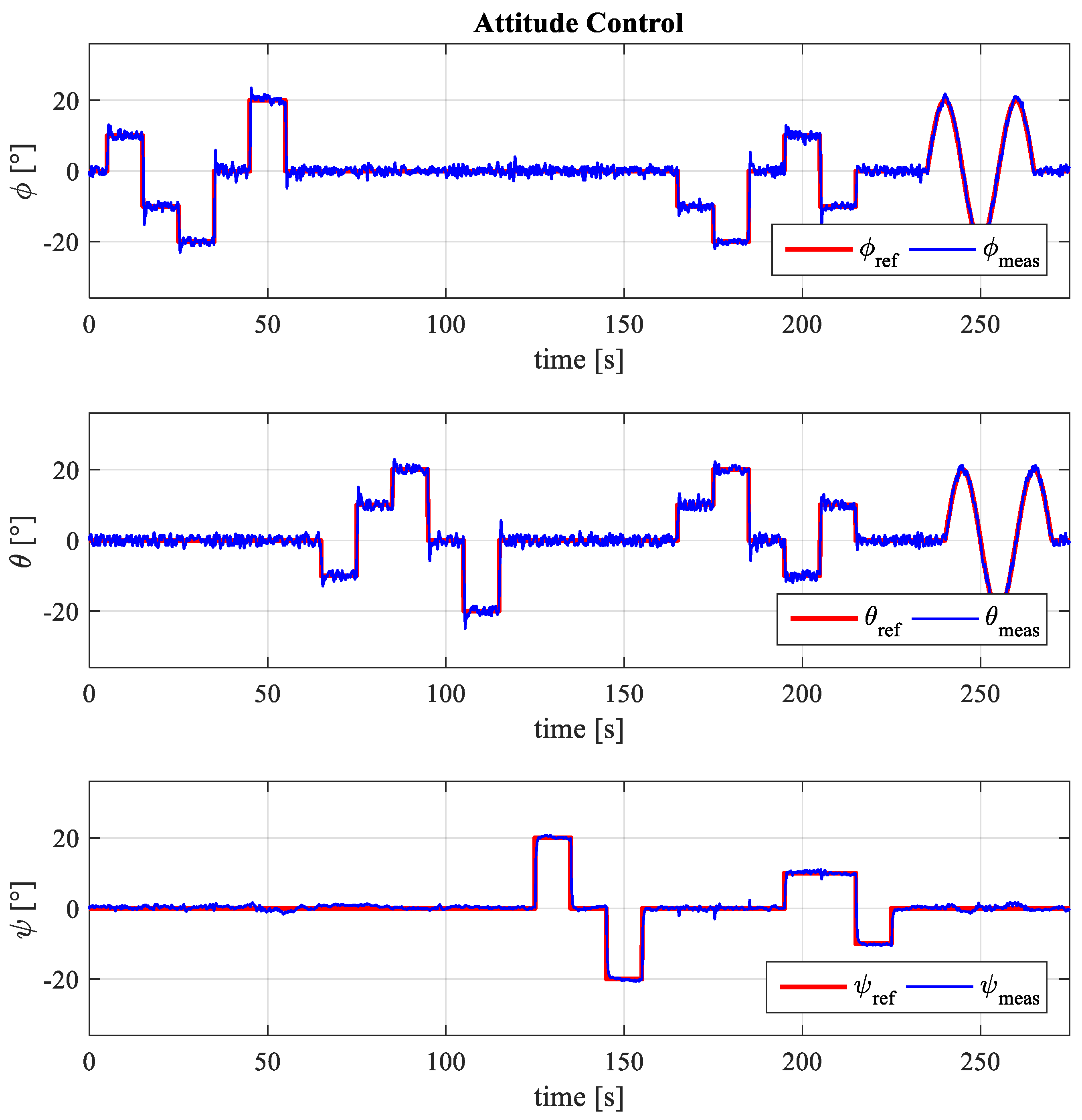
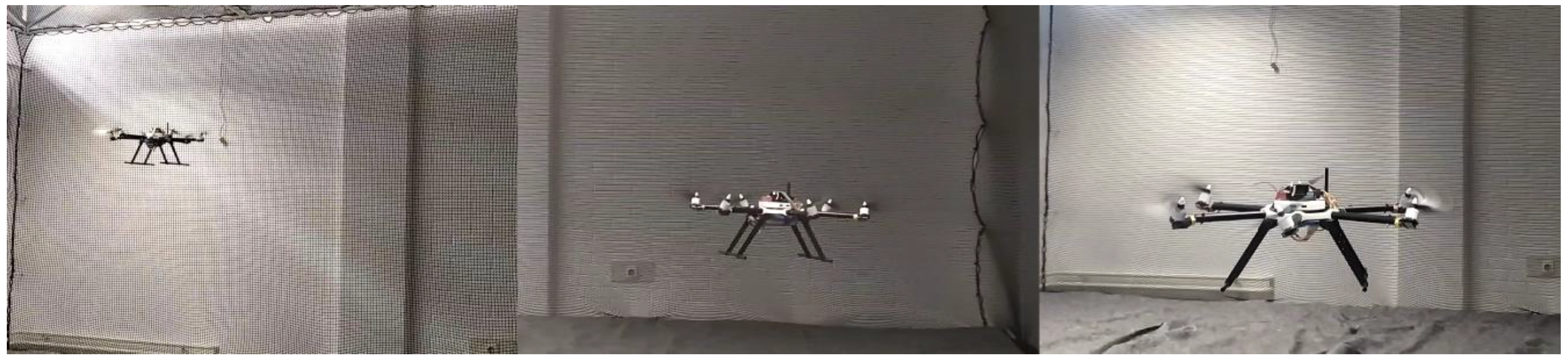
4. Experimental Validation Framework
5. Discussions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yeom, S.; Cho, I.J. Detection and tracking of moving pedestrians with a small unmanned aerial vehicle. Appl. Sci. 2019, 9, 3359. [Google Scholar] [CrossRef] [Green Version]
- Heim, R.H.J.; Wright, I.J.; Scarth, P.; Carnegie, A.J.; Taylor, D.; Oldeland, J. Multispectral, Aerial Disease Detection for Myrtle Rust (Austropuccinia psidii) on a Lemon Myrtle Plantation. Drones 2019, 3, 25. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liu, C. Applications of multirotor drone technologies in construction management. Int. J. Constr. Manag. 2018, 19, 401–412. [Google Scholar] [CrossRef]
- In the Air with Zipline’s Medical Delivery Drones. Available online: https://0-spectrum-ieee-org.brum.beds.ac.uk/in-the-air-with-ziplines-medical-delivery-drones/particle-2 (accessed on 24 June 2021).
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A survey of hybrid Unmanned Aerial Vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- Ramezani, A.; Shi, X.; Chung, S.; Hutchinson, S. Bat Bot (B2), a biologically inspired flying machine. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3219–3226. [Google Scholar] [CrossRef]
- Car, M.; Markovic, L.; Ivanovic, A.; Orsag, M.; Bogdan, S. Autonomous Wind-Turbine Blade Inspection Using LiDAR-Equipped Unmanned Aerial Vehicle. IEEE Access. 2020, 8, 131380–131387. [Google Scholar] [CrossRef]
- Martinović, D.; Bogdan, S.; Kovačić, Z. Mathematical Considerations for Unmanned Aerial Vehicle Navigation in the Magnetic Field of Two Parallel Transmission Lines. Appl. Sci. 2021, 11, 3323. [Google Scholar] [CrossRef]
- Kasac, J.; Stevanovic, S.; Zilic, T.; Stepanic, J. Robust Output Tracking Control of a Quadrotor in the Presence of External Disturbances. Trans. FAMENA 2013, 37, 29–42. [Google Scholar]
- Nguyen, A.T.; Xuan-Mung, N.; Hong, S.K. Quadcopter adaptive trajectory tracking control: A new approach via backstepping technique. Appl. Sci. 2019, 9, 3873. [Google Scholar] [CrossRef] [Green Version]
- Xia, D.; Cheng, L.; Yao, Y. A Robust Inner and Outer Loop Control Method for Trajectory Tracking of a Quadrotor. Sensors 2017, 17, 2147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- T-motor U15XXL. Available online: https://uav-en.tmotor.com/html/2019/MannedAircraft_0618/272.html (accessed on 28 June 2021).
- Staub, N.; Bicego, D.; Sablé, Q.; Arellano, V.; Mishra, S.; Franchi, A. Towards a Flying Assistant Paradigm: The OTHex. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26 May 2018; pp. 6997–7002. [Google Scholar] [CrossRef] [Green Version]
- Convens, B.; Merckaert, K.; Nicotra, M.M.; Naldi, R.; Garone, E. Control of Fully Actuated Unmanned Aerial Vehicles with Actuator Saturation. IFAC-PapersOnLine 2017, 50, 12715–12720. [Google Scholar] [CrossRef]
- Franchi, A.; Carli, R.; Bicego, D.; Ryll, M. Full-Pose Tracking Control for Aerial Robotic Systems with Laterally Bounded Input Force. IEEE Trans. Robot. 2018, 34, 534–541. [Google Scholar] [CrossRef] [Green Version]
- Jiang, G.; Voyles, R.; Sebesta, K.; Greiner, H. Estimation and optimization of fully-actuated multirotor platform with nonparallel actuation mechanism. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6843–6848. [Google Scholar] [CrossRef]
- Rajappa, S.; Ryll, M.; Bülthoff, H.H.; Franchi, A. Modeling, control and design optimization for a fully-actuated hexarotor aerial vehicle with tilted propellers. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 May 2015; pp. 4006–4013. [Google Scholar] [CrossRef] [Green Version]
- Michieletto, G.; Ryll, M.; Franchi, A. Fundamental Actuation Properties of Multirotors: Force–Moment Decoupling and Fail–Safe Robustness. IEEE Trans. Robot. 2018, 34, 702–715. [Google Scholar] [CrossRef] [Green Version]
- Ryll, M.; Muscio, G.; Pierri, F.; Cataldi, E.; Antonelli, G.; Caccavale, F.; Bicego, D.; Franchi, A. 6D interaction control with aerial robots: The flying end-effector paradigm. Int. J. Rob. Res. 2019, 38, 1045–1062. [Google Scholar] [CrossRef] [Green Version]
- Brescianini, D.; D’Andrea, R. Design, modeling and control of an omni-directional aerial vehicle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3261–3266. [Google Scholar] [CrossRef]
- Park, S.; Her, J.; Kim, J.; Lee, D. Design, modeling and control of omni-directional aerial robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1570–1575. [Google Scholar] [CrossRef]
- Park, J.; Cho, N. Collision avoidance of hexacopter UAV based on LiDAR data in dynamic environment. Remote Sens. 2020, 12, 975. [Google Scholar] [CrossRef] [Green Version]
- Ikeda, T.; Yasui, S.; Fujihara, M.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Wall contact by octo-rotor UAV with one DoF manipulator for bridge inspection. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5122–5127. [Google Scholar] [CrossRef]
- Czyba, R.; Szafranski, G.; Janik, M.; Pampuch, K.; Hecel, M. Development of Co-Axial Y6-Rotor UAV—Design, Mathematical Modeling, Rapid Prototyping and Experimental Validation. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 1102–1111. [Google Scholar] [CrossRef]
- Brazinskas, M.; Prior, S.D.; Scanlan, J.P. An empirical study of overlapping rotor interference for a small unmanned aircraft propulsion system. Aerospace 2016, 3, 32. [Google Scholar] [CrossRef]
- Driessens, S.; Pounds, P. The triangular quadrotor: A more efficient quadrotor configuration. IEEE Trans. Robot. 2015, 31, 1517–1526. [Google Scholar] [CrossRef]
- Piljek, P.; Kotarski, D.; Krznar, M. Method for Characterization of a Multirotor UAV Electric Propulsion System. Appl. Sci. 2020, 10, 8229. [Google Scholar] [CrossRef]
- Kotarski, D.; Piljek, P.; Pranjić, M.; Grlj, C.G.; Kasać, J. A Modular Multirotor Unmanned Aerial Vehicle Design Approach for Development of an Engineering Education Platform. Sensors 2021, 21, 2737. [Google Scholar] [CrossRef] [PubMed]
- Fossen, T.I. Guidance and Control of Ocean Vehicles, 1st ed.; Wiley: Chichester, UK, 1994. [Google Scholar]
- Series 1580 Dynamometer Datasheet. Available online: https://cdn-docs.rcbenchmark.com/wp-content/uploads/2016/01/2016-02-04-RCbenchmark-1580-datasheet.pdf (accessed on 2 July 2021).
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2015), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar] [CrossRef]
- DJI Agras T20. Available online: https://www.dji.com/hr/t20 (accessed on 29 June 2021).
- Freefly Alta 8. Available online: https://freeflysystems.com/alta-8 (accessed on 29 June 2021).
- PC-1 Multipurpose Quadcopter. Available online: https://www.airforce-technology.com/projects/pc-1-multipurpose-quadcopter/ (accessed on 29 June 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setup | Fixed-Pitch Propeller | BLDC Motor | ESC | Energy Source | ||
|---|---|---|---|---|---|---|
| Diameter | Pitch | Designation | Kv | |||
| 1 | 7″ | 2.4″ | MN1806 | 1400 | Air 10 A | 12 V |
| 2 | 9″ | 4″ | MN2214 | 920 | Afro 20 A | 12 V |
| 3 | 10″ | 4″ | MN2214 | 920 | Afro 20 A | 12 V |
| 4 | 17″ | 6″ | MN4014 | 400 | Air 40 A | 4S LiPo |
| 5 | 17″ | 6″ | MN4014 | 400 | Air 40 A | 6S LiPo |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotarski, D.; Piljek, P.; Kasać, J.; Majetić, D. Performance Analysis of Fully Actuated Multirotor Unmanned Aerial Vehicle Configurations with Passively Tilted Rotors. Appl. Sci. 2021, 11, 8786. https://0-doi-org.brum.beds.ac.uk/10.3390/app11188786
Kotarski D, Piljek P, Kasać J, Majetić D. Performance Analysis of Fully Actuated Multirotor Unmanned Aerial Vehicle Configurations with Passively Tilted Rotors. Applied Sciences. 2021; 11(18):8786. https://0-doi-org.brum.beds.ac.uk/10.3390/app11188786
Chicago/Turabian StyleKotarski, Denis, Petar Piljek, Josip Kasać, and Dubravko Majetić. 2021. "Performance Analysis of Fully Actuated Multirotor Unmanned Aerial Vehicle Configurations with Passively Tilted Rotors" Applied Sciences 11, no. 18: 8786. https://0-doi-org.brum.beds.ac.uk/10.3390/app11188786