
Smart Mobility and Aspects of Vehicle-to-Infrastructure: A Data Viewpoint


University Science Park UNIZA, University of Žilina, Univerzitná 8215/1, 010 26 Žilina, Slovakia
*
Author to whom correspondence should be addressed.
Appl. Sci. 2021, 11(22), 10514; https://0-doi-org.brum.beds.ac.uk/10.3390/app112210514
Submission received: 30 September 2021
/
Revised: 4 November 2021
/
Accepted: 5 November 2021
/
Published: 9 November 2021
(This article belongs to the Special Issue Advances in Information System Analysis and Modeling (AISAM))
Abstract
:The aim of this article is to describe estimates of data difficulty and aspects of the data viewpoint within Vehicle-to-Infrastructure (V2I) communication in the Smart Mobility concept. The historical development of the database system’s architecture, that stores and processes a larger amount of data, is currently sufficient and effective for the needs of today’s society. The goal of vehicle manufacturers is the continual increase in driving comfort and the use of multiple sensors to sense the vehicle’s surroundings, as well as to help the driver in critical situations avoid danger. The increasing number of sensors is directly related to the amount of data generated by the vehicle. In the automotive industry, it is crucial that autonomous vehicles can process data in real time or can locate itself in precise accuracy, for the decision-making process. To meet these requirements, we will describe HD maps as a key segment of autonomous control. It alerts the reader to the need to address the issue of real-time Big Data processing, which represents an important role in the concept of Smart Mobility.
1. Introduction
The continual increase in the total number of vehicles is causing daily traffic congestion and accidents, which often result in serious injuries. The improper management of a critical traffic situation causes further inconvenience. The innovation discussed here is part of the Smart Mobility concept, which is becoming more and more important due to the ever-increasing intensity of traffic [1].
According to [2], up to 50% (approximately 3.3 billion) of all people in the world live in cities. It is estimated that this number will increase to 5 billion by 2030. As the population grows, the demands on the transport infrastructure increase. To achieve greater comfort in transport and more intelligent management and monitoring of transport infrastructure, it is necessary to ensure quality and reliable data transmission of information. This information can also be used in communication between transport infrastructure and vehicles (V2I).
Effective communication in the Smart Mobility concept is a key component, on which other intelligent solutions within the Smart Mobility concept are based. Creating such a complex system of vehicle communication with all entities of the transport infrastructure is a challenging process. It is necessary to ensure the security of communication, sufficient data storage capacity and speed of processing the obtained data. The mentioned requirements are a small part of the necessary parameters that would enable the creation of a fully autonomous vehicle. To specify the requirements of V2I communication, it is necessary to acquire a realistic estimate of the amount of data produced by autonomous vehicles.
The authors have many years of experience with data integration of various transport systems and also with the entire process from data collection to knowledge extraction for decision making. There is a lot of research that has focused on various aspects of Smart Mobility, such as, systems integration, the construction of transport infrastructure, transport system resilience, traffic safety, green mobility and data communication security [3,4,5,6]. Another piece of research defines the methodical requirements for the operation of the Smart Mobility concept and its goals [7]. Based on our previous experience, our intention is to point out the data aspects, which need to be considered in order to maintain sustainable communication in the Smart Mobility concept.
Currently, the most modern commercial vehicles on the market fall into the third level of autonomy according to the Society of Automotive Engineers (SAE International) and are awaiting regulatory approval. However, even vehicles at a lower level of autonomy generate approximately 25 GB/h of data. Each higher level directly correlates with the number of sensors in the vehicle, which causes a higher amount of data produced [8]. The usability and availability of sensors and camera modules in the vehicle changes the orientation of the automotive industry mainly into the data viewpoint. The data obtained from sensors, combined with computing, transform data to make decisions of an autonomous vehicle.
According to calculations by Stan Dmitrieva in 2017 [8], whose article was updated by Simon Wright, after combining the estimated amount of data from individual vehicle sensors from the third level of autonomy, the total amount of data transmitted are approximately 19 TB/h. For vehicles that fall into the lower category of autonomy, the estimated amount of data produced are about 1.4 TB/h (Figure 1). According to the American Automobile Association (AAA), the average person spends 17,600 min a year behind the wheel, which is about 293 h. After counting the calculated values, we can estimate that one vehicle produces more than 5500 TB of data per year [8].
The scope of this paper is focused on data requirements in V2I communication. We also discuss the effectiveness of existing solutions in relation to such an enormous amount of data which need to be stored, transform and processed in the Smart Mobility concept, specifically V2I communication. The increase in produced data volume has gradually led to the development of Big Data, Cloud and Edge Computing.
Some of the key issues with the large volumes of data have been their management in traditional data warehouses and knowledge acquisition using data mining and statistical analysis techniques [9]. The solution to this problem was the development of Big Data, a data analysis methodology that allows the storage and analysis of a big volume of data using a new generation of technologies and architecture [10]. In Big Data technology, each node is independent and self-sufficient. In contrast, the Cloud solution provides more computing power by distributing individual tasks to multiple Cloud devices [10]. The data are stored on the cloud, which can be accessed by a user from any location without the need to know the specific location of the data storage [11]. There are many benefits to using Cloud technology such as its virtual infrastructure, access for any device via the Internet and scalability. According to [10], Big Data and Cloud computing complement each other and their combination provides many benefits that neither technology would be able to provide on its own.
Many of the tasks performed by IoT devices are time sensitive, and the use of the Cloud is not a suitable solution for them. The data must be uploaded to centralized servers and the results are sent back to the IoT devices after making the necessary calculations. These results are often needed in less time than they can be provided with Cloud computing. The solution to this problem may be the use of Edge computing. It allows processing of data closer to the device and end-user, thus also reducing the time it takes to transfer data. Thanks to distributed deployment, balanced network traffic is ensured and traffic peaks are avoided. This also makes latency and energy consumption lower. However, unlike the Cloud, Edge computing devices have less storage capacity and, therefore, they would not be able to store large amounts of data. If we need to ensure low latency and unlimited storage capacity, a combination of Edge computing and the Cloud is the ideal option [12].
As well as the inclusion of autonomous vehicles in normal traffic with the ability to communicate with the surroundings, the design of the processing architecture and the way data are stored in real time, are currently a major challenge for the entire Smart Mobility concept.
2. Smart Mobility Development
Smart Mobility is a general concept for the integration of different modes of transport and infrastructure. The concept of Smart Mobility has been a topic discussed in recent years, not only in scientific circles, but also at city level. It brings benefits that will enable cities to manage transport in an efficient and sustainable way.
Smart Mobility is a new vision of traffic management. It brings expectations in relation to addressing the issue of current transport as well as transport in the near future. It is seen as a new way of thinking and perceiving how people are moving and has evolved over the years from the convergence of the digital revolution with transport [13]. With the advent of modern technologies such as fast data connectivity, reliable sensor systems or powerful mobile devices, the concept of intelligent mobility with the advent of automated and autonomous vehicles is becoming an increasingly common part of transport systems.
The continual increase in urbanization puts pressure on the construction of additional road infrastructure. The problem of the growing number of passenger cars has so far been addressed by adding new roads to meet the requirements [13]. The construction of additional roads in cities should ease the unmanageable traffic situation. However, it does not provide a sufficient solution to the problem as this method reaches its limits due to existing urban infrastructure. Cities can increase the efficiency of traffic intensity management by setting up appropriate solutions and implementing them into current transport infrastructure.
2.1. Current Goals
The vision of Smart Mobility consists of many elements, which transform the philosophy of transport into new possibilities, as shown in Figure 2, and offer a possible solution to the current situation. According to [7], the Sustainable and Smart Mobility Strategy presented by the European Commission, important milestones for Smart Mobility include:
- By 2030:
- ◦
- multimodal passenger transport will be deployed facilitated by an integrated electronic ticket and freight transport that will take place in a so-called paperless form;
- ◦
- automated mobility will be deployed on a large scale, emissions will be reduced by 55%;
- ◦
- at least 30 million vehicles on European roads will be zero-emission vehicles;
- ◦
- high-speed rail transport will be doubled;
- ◦
- there will be carbon-neutral collective travel within Europe within 500 km.
- By 2050:
- ◦
- rail freight transport will be doubled;
- ◦
- a multimodal Trans-European Transport Network (TEN-T) for sustainable and intelligent transport with high-speed connectivity capable of operating on the comprehensive network will be built;
- ◦
- climate neutrality (reducing transport’s dependence on fossil fuels);
- ◦
- high-speed rail transport will be tripled;
- ◦
- almost all cars, buses and vans will have zero emissions.
The intention is to integrate connected and automated multimodal mobility into real transport. Interconnected and automated systems have great potential to improve the operation of transport systems, their sustainability and safety. Smart Mobility offers a solution that, based on real-time data, could evaluate and optimize the current traffic situation in the form of traffic intensity management on a certain section or provide information on the number of freely available parking spaces.
Not only the European Commission, but also the Smart Mobility concept itself has defined objectives such as:
- Prevention of road accidents.
- Ensuring smooth transport and thus reducing transport times.
- Reduction of capacity congestion in transport infrastructure.
- Enhancing safety.
- Improving the economic efficiency of transport.
- Reduction in the number of means of transport for individual transport [14].
2.2. Further Development
Meeting the objectives defined in the Smart Mobility concept will bring several key solutions that should ensure a higher level of traffic using advanced information and communication technologies. Travel will be easier and smoother, traffic management efficiency will be increased and information on traffic intensity will be provided over time, which will allow prediction and optimization of planning and information on free parking spaces will be available. The overall architecture and mode of shared transport will be proposed, which will affect every single inhabitant of the city. The aim of the transformation is primarily to turn transport as a product into a mobility service (Mobility-as-a-Service).
Mobility services will be a part of the lives of residents. As the population increases, it is important to effectively design a mode of transport for many people in a limited range of the physical capacity of the transport infrastructure. It is also important to respect the degree of environmental friendliness of the means of transport, together with sustainability. The introduction of low-emission and emission-free zones will bring a new perspective on shared transport, where bicycles and scooters will not only be an exceptional transport option but a common part of people’s daily lives.
With the advent of new technologies in the automotive industry, we are increasingly faced with the concept of autonomous vehicles, which are often seen as an important element of Smart Mobility.
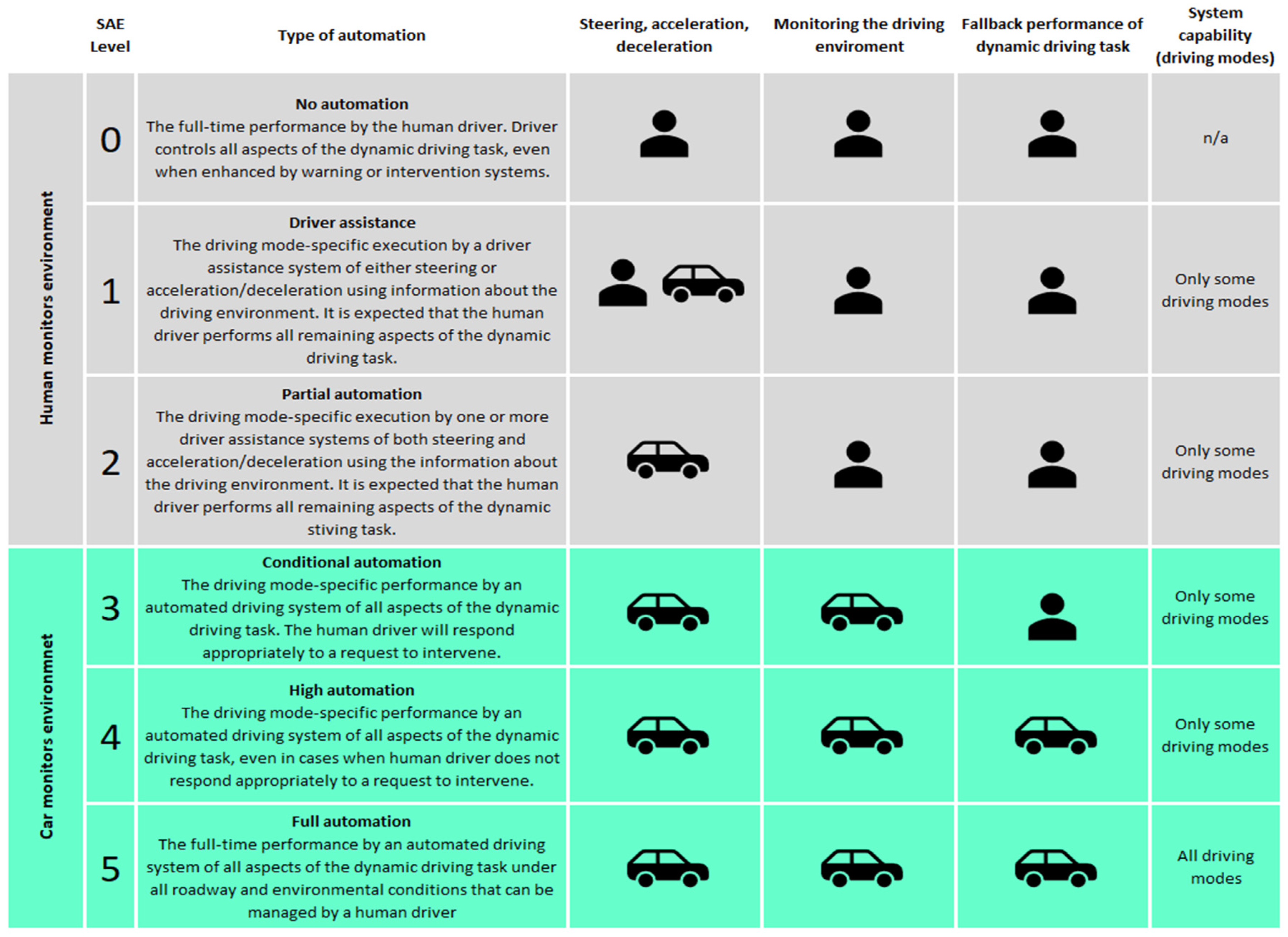
The definition of an autonomous vehicle (AV) can be understood as a vehicle capable of sensing the surrounding environment, evaluating the traffic situation and performing activities and maneuvers without the need for human intervention. It is not at all necessary for a person to take control of the vehicle or to be in the vehicle at all. An AV is able to drive on the same roads, evaluate traffic situations (react more quickly in crisis situations), do everything as an experienced human driver. The SAE has defined six levels of driving automation—from level 0 (fully manual) to level 5 (full autonomy) [16]. These six categories are divided into two groups of three levels. The first group consists of levels 0–2 inclusive, where the driver monitors the environment around him. The second group are levels 3–5 inclusive, where the environment is monitored by an automated system capable of reacting in time based on the information obtained (Figure 3).
The development of technologies to support autonomous vehicles and their future is exciting. Technological backgrounds, radars and sensors receive a wealth of support in their improvement, use and adjustment. According to a published study by the Ponemon Institute entitled “Securing the Connected Car: A Study of Automotive Industry Cybersecurity Practices”, connected vehicles (as well as autonomous vehicles) have a rich background in physical safety (seat belts, airbags and others). Today, physical safety is relatively well covered, as is also reported in the annual decrease in road accident deaths based on European Commission statistics (Figure 4) [18].
According to the study by the Ponemon Institute, the field of cybersecurity is falling behind. It is also necessary to add digital security features to vehicles. When it comes to putting intelligent and connected vehicles into real traffic, today’s vehicles are not ready in the area of digital security. Therefore, it is extremely important to pay attention to digital security [19]. This document is based on a survey of approximately 590 professionals, where more than 2/3 of respondents accepted the need to increase cyber security and described the area as “urgent”.
3. V2I Communication
Efficient data communication between individual traffic entities is one of the basic pillars of Smart Mobility. At the very top of the communication hierarchy is the V2X (Vehicle-to-Everything) communication. Vehicle-to-Everything (V2X) communication is a paradigm of the intelligent transport system (ITS). ITS is used to increase the efficiency and reliability of data transmission. This is achieved by the timely implementation of a complete set of communication mechanisms in all devices and infrastructure involved in traffic management and monitoring [20]. Within V2X we distinguish several subcategories, such as:
- Vehicle-to-vehicle (V2V).
- Vehicle-to-network (V2N).
- Vehicle-to-pedestrian (V2P).
- Vehicle-to-infrastructure (V2I).
3.1. Definition
Communication between vehicles and road infrastructure equipment is referred to as vehicle-to-infrastructure (V2I) [21]. According to [22], there are several V2I system architectures that match in key components, namely:
- Vehicle On-Board Unit or Equipment (OBU or OBE).
- Roadside Unit or Equipment (RSU or RSE).
- Safe Communication Channel.
The vehicle is represented by the OBU in V2I communication. This component ensures communication between the vehicle and other vehicles in its vicinity, as well as between the vehicle and the RSUs. The RSU represents infrastructure in V2I communication. The device is connected to a network designed for V2I communication and can be located at intersections, petrol stations, pedestrian crossings or other locations. In addition to receiving and sending messages, its tasks may include prioritizing messages sent to and from vehicles [22].
Based on memory capacity and communication capabilities, OBUs collect data at regular intervals, with the oldest data being overwritten. OBUs send “status messages” to other OBUs to ensure safety and, at the same time, they transmit vehicle data together with GPS data to RSUs [22]. The main idea of V2I communication is to provide local information on real-time safety, such as speed limitation, safe spacing between vehicles, accident warning or safety at intersections [23]. The purpose of providing this information to the driver or vehicle in real time is to try to avoid traffic collisions and increase mobility, thus ensuring smooth traffic [21]. To secure smooth traffic, V2I applications can be used, for example, for dynamic control of light signals at intersections or early notification of traffic congestion.
3.2. Communication Technologies
The method and efficiency of data communication is an important aspect of the Intelligent Transport System (ITS). As a part of the development of the Smart Mobility concept, the standards used have gradually changed in order to increase the speed of information transfer, reliability and efficiency of communication [22]. V2I communication takes place via wireless communication technologies, namely dedicated short-range communications (DSRC) and cellular vehicle-to-everything (C-V2X).
3.2.1. Dedicated Short-Range Communications
Dedicated short-range communications (DSRC) are a wireless communication technology used for V2I communication, namely between the On-board Unit (OBU) installed in the vehicle and the Road Site Unit (RSU) located in the road infrastructure equipment [13]. Communication works based on WLAN technology. When individual vehicles and transport infrastructure equipment are within range, they create an ad-hoc network. The messages sent include, for example:
- Cooperative Awareness Message (CAM),
- Basic Safety Message (BSM),
- In Vehicle Information Message (IVI),
- Service Request Message (SRM) [13].
The technology is part of WLAN IEEE 802.11 standard. It is known as ITS-G5 in Europe and as Wireless Access in Vehicular Environments (WAVE) in the USA [13]. The DSRC range was determined to be 300 m by testing [24]. The delivery of messages over a longer distance is possible using multi-hop. A communication node equipped with a DSRC module routes the received messages to another communication node. However, there is a delay in the transmission of messages, which is particularly a problem for the transmission of safety messages that should reach the target vehicle as quickly as possible. Another problem is the use of the same radio channels by an increased number of connected devices, for example, at peak times when the capacity of the network equipment is maximized. This results in an increase in signal interference, transmission latency and a reduction in data transfer rates. Data latency normally reaches 4–5 ms. However, the delay is even greater during peak times. The advantage of the DSRC is that it does not need a supporting communication infrastructure and the communication takes place on free frequency bands [13].
3.2.2. Cellular Vehicle-to-Everything
Cellular vehicle-to-everything (C-V2X) is one of the researched communication technologies for communication within the intelligent transport system (ITS). It also covers communication between vehicles and infrastructure devices (V2I). This technology is managed by the 3rd Generation Partnership Project (3GPP). Data transmission is performed via a wireless mobile data network 4G LTE (Long-term evolution) or 5G NR (New radio). The services of mobile operators are used for this communication, which causes several disadvantages compared to DSRC technologies, for example, communication is usually charged, takes place in the licensed band and the device must be registered with the operator [13].
When using a 5G network, data latency and error rate should be lower, and data throughput and network reliability higher. The problem is in areas where there is not enough coverage of the territory by 5G networks. In this case, the C-V2X communication will be performed via a 4G LTE network, which is not built on as many devices as can occur, for example, in traffic jams in larger cities. In this case, it is questionable what will be the latency and throughput of this communication. [13]
The use of 5G networks will facilitate the transition from single-vehicle intelligence to connected intelligence, where the vehicle will be controlled not only by data obtained from its sensors but also by data from other vehicles and other ITS elements. As a result, the driver will have a greater overview of the traffic situation in the area in which he/she is located and not only about its immediate surroundings. At the same time, connected intelligence is a necessary step for the complete autonomy of vehicles. In addition to the above reasons, the construction of 5G networks is also essential for the use of HD maps in road transport [25].
3.3. IoT
As mentioned, wireless communication technologies are an important aspect of Smart Mobility. Using these technologies, the individual ITS elements exchange the necessary data for safer and smoother traffic. This communication is provided by IoT (Internet of Things) devices that collect and send data. IoT is the interconnection of physical objects equipped with sensors, software and other technologies that are used to exchange data with other devices over the Internet [13]. It is through the integration of IoT devices into individual elements of road traffic that we approach the interconnected and autonomous driving of vehicles. An example of IoT devices integrated into a vehicle is shown in Figure 5.
In addition to the exchange of data between vehicles, individual vehicles also obtain other necessary information by communicating with the infrastructure. As mentioned above, many IoT devices also occur in road infrastructure and collect the necessary data. These include, for example, object recognition, parking space occupancy or light signal control. Examples are also IoT devices on the roads or on the side of roads, such as RFID, microwave radar or video image processors, which are used to collect data on current traffic density. This data is then processed in the cloud and used to predict traffic flow. By obtaining information about the predicted traffic flow via V2I communication, passengers can avoid places where there is a risk of traffic jams [26].
The development and combination of IoT devices, artificial intelligence (AI) and communication technologies will gradually diminish the driver’s driving role and the vehicle will take full control of the steering [27].
4. Data Categorization
Data collected within V2I communications can be divided into several categories in several ways according to (Figure 6):
- the source;
- the method of collection;
- character [13].
4.1. Data Categorization by Source
A source that can share useful information for V2I communication to work properly can provide a variety of data. These sources include, for example, reports from people and information provided by the vehicle manufacturer. Information from third parties is also useful, as is known today. The last example is a state-owned system that could provide comprehensive information for V2I communication [13].
4.2. Data Categorization by Method of Collection
Another way we can categorize data for V2I communication is according to the way the data are collected. The most amount of data are collected through sensors in intelligent infrastructure, such as camera systems, temperature sensors, barometric pressure meters, traffic censuses and others. These sensors are not movable, so data from them are always evaluated against the same location [13].
Camera systems, radar, vehicle speed sensor and lidar are just some of the sensors that are equipped with intelligent cars. Unlike sensors in the infrastructure, the vehicle dynamically changes its position and changes the location with which the data is correlated. This location is detected through GNSS/GPS sensors. Vehicle location data are often also obtained from online navigation systems or mobile applications, such as Google Maps or Waze. By obtaining the position data of several vehicles, it is possible to predict traffic jams. However, it should be taken into account that the number of mobile devices does not have to be the same as the number of vehicles, for example, in the case of a bus with a larger number of passengers [13].
Relevant information may also be obtained from information systems. For example, we can obtain information on mobile signal road coverage through the GIS. Monitoring systems can provide data on, for example, the number of available parking spaces. A different perspective may be on obtaining useful information provided by people, such as reports from emergency services (police, health service and firefighters) or citizen reports [13].
4.3. Data Categorization by Character
The character of the data is defined by the level of detail of the temporal and spatial area it represents. According to this character, we divide the data into operational, tactical and strategic [13].
Operational data are provided in real time and focuses on a short period of time. These relate only to the area in which the vehicle is located and its immediate surroundings. The information contained in these data relates to actual traffic accidents, impassable road sections or other problems that need immediate decisions to be made [13].
Tactical data have a medium level of detail, providing information about traffic situations affecting the entire location. Unlike operational data, tactical data may not be provided in real time but at larger time intervals. However, it is necessary that the data must be up-to-date and provide the recipient with the information to make tactical decisions, such as choosing to bypass a traffic jam [13].
Strategic data have the smallest level of detail. In terms of time, it is a period of at least one month. In terms of space, the minimum size of the district. However, their analysis can provide information that deals with traffic density in individual sections and, thus, helps in making strategic decisions, such as building infrastructure [13].
4.4. Data Domains According to the Described Categorizations
As mentioned in the definition, V2I consists of communication between the vehicle and the infrastructure. Thus, these two domains, intelligent vehicles and intelligent infrastructure, are major producers of data content. Table 1 summarizes the mentioned domains according to the above categorization in terms of the character of the data, potential sources for obtaining and possible ways of collecting these data [13].
5. HD Maps
One of the goals of Smart Mobility is to have fully autonomous vehicles. In order to do that, vehicles need to have an overview of the traffic situation in the vicinity and they also need to have road infrastructure information. At the same time, they need information even outside of the shared data between the different participants in the V2X communication in order to cover all of the above areas. One possible solution is to use High-Definition Maps (HD Maps), as a part of the way the vehicle is oriented on the road. In general, we can mark HD maps as high-resolution maps that have information and accuracy at centimeter level. They contain information whether static or dynamic, such as:
- map documents;
- traffic situations;
- traffic signs and intersections;
- weather reports;
- urban facilities on city streets [28].
According to the Automotive Edge Computing Consortium (AECC), the use of HD maps is a key issue in Mobility-as-a-Service, ADAS (Advanced Driver Assistance System) and autonomous driving [28]. Together with all of the sensors available in vehicles, the information obtained will contribute to updating HD maps, which will help to move automated and autonomous transport from level 2 automation. Vehicles from this level of automatization require precise localization capabilities to adapt to the environment and make real-time decisions for driving.
As an example, we will provide a simple repair of the pothole on the road, where the repair takes several days. This is not a problem at lower levels as drivers automatically avoid the repair site. The problem arises with autonomous driving when the vehicle needs to be informed that there is an obstacle on the road and instructions to avoid it. For this purpose, it is necessary to build a real-time data processing, storage architecture and the ability to provide the information collected to other vehicles on the road.
5.1. HD Map Layers
Based on the available information, the AECC has produced preliminary estimates of the operation of HD maps and the overall network occupancy that occurs when a vehicle contributes data to HD maps.
The AECC divided the different layers of HD maps into dynamic and static (permanent). Static maps represent today’s famous maps of the territory. We divide dynamic maps into four categories, based on updating information according to the time interval (Figure 7) [28].
These are:
- The Permanent Static Layer contains information that has the lowest data frequency of updates of the order of days and more. The types of data that this layer represents are, for example, information about intersections or traffic signs. We can also mark this layer as a static map.
- The Transient Static Layer updates data on an hourly basis. The layer includes, for example, the place of work on the road, accidents, road closures and others.
- In the Transient Dynamic Layer, the information is changed in units of minutes. The layer includes weather data, illegally parked cars, dirt on road infrastructure and so on.
- The Highly Dynamic Layer is the most frequent layer of all dynamic layers. The data are collected after a few seconds and contain information about vehicles, pedestrians, or cyclists. The AECC does not deal with information that is collected in less time than the seconds required for autonomous vehicle driving. [28].
5.2. Patterns for Updating Data of HD Maps
The overall flow of information from the vehicle to the complete updating of HD maps depends on the determined strategy of processing the obtained data. The expected process begins with obtaining source data from the vehicle’s sensors, followed by data processing and analysis. In the last phase, HD maps are updated and information is sent back to the Vehicle (Figure 8) [28].
There are several types of ways to implement the HD Map Update Process. The most basic are:
- Pattern A—we have three functional blocks in the vehicle, as in Figure 9. The collected data from the sensors are processed and the HD map is updated directly in the vehicle. The change information is sent (Uplink) to the MSP Edge/Central Server where the central map is updated for other vehicles nearby.
- Pattern B—there are two functional blocks in the vehicle. The process is conducted by sent data from sensors (Uplink) to the MSP Edge/Central Server where the central map is then processed and updated. The updated map is resent to the vehicle (Downlink) [28].
Based on Figure 9, Pattern A obtains data from its surroundings and sends it to a module in which the collected data are analyzed and processed. Before performing an in-vehicle HD map update, the vehicle needs to receive confirmation information from a central server. This consists of information that an incident on the road infrastructure was recorded by several vehicles. After receiving the information, the HD map is updated directly in the vehicle. The advantage of this pattern is that bidirectional data transmission is not required. After updating the HD map in the vehicle, the changes made will be sent via the Internet to the MSP Edge/Central Server, where the HD maps stored on the servers will be updated. Even according to [28], network traffic volume is not large, because the single flow of information is directed from the vehicle to the central server.
On the contrary, Pattern B operates in a two-way data stream and has comparably higher data transmission requirements [28]. In Pattern B, the vehicle contains only two function blocks. The first one is used to obtain data from the environment and the second one is used to update the HD map. When the vehicle detects an event that is not in the HD map, it sends the acquired data via the Internet to the MSP Edge/Central Server. An analysis and update of the HD map is performed in the central server. The updated maps are sent back to the vehicle via the Internet, where the HD map is updated.
5.3. Network Occupancy of Updating HD Maps
In the section “Introduction”, we showed estimates of data difficulty for vehicles of lower and medium levels of autonomy. The estimated information consisted of statistics from the United States of America. The AECC has produced its own estimates, including the processing and updating of HD maps, which they consider to be a key aspect of autonomous management. Certain constants, such as the total length of journeys and the number of illegally parked vehicles are obtained from Tokyo.
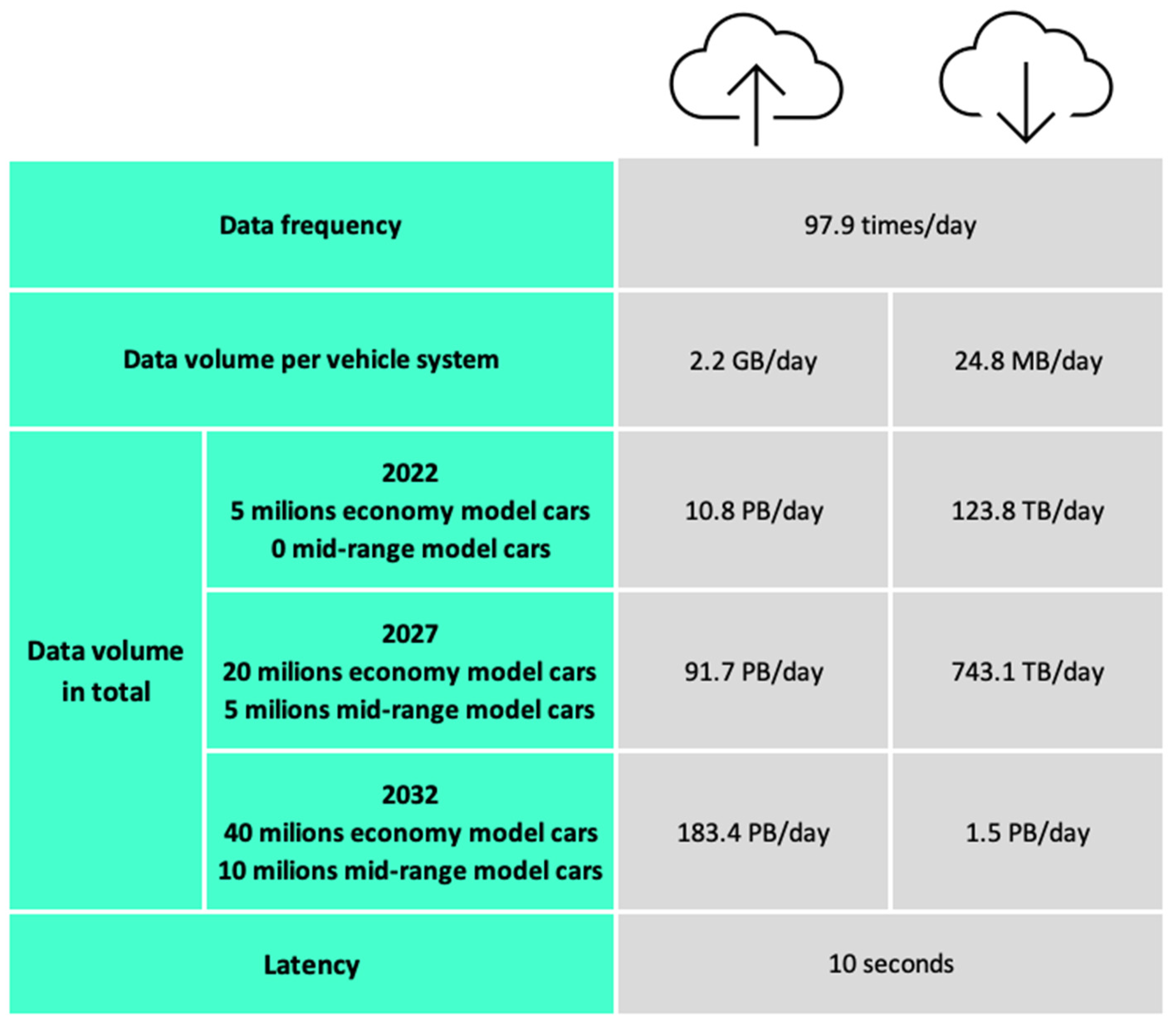
The individual indicators that are included in the calculation of the estimate of the total amount of data transferred according to pattern B are:
- Data Upload/Download Frequency—A frequency defined as the number of detected changes in the Transient Dynamic Layer and HD map updates.
- Upload/Download Data Volume (per vehicle system)—represents the total amount of data transferred between the vehicle and MSP Edge/Cloud Server.
- Upload/Download Data Volume (in total)—represents the total amount of transmitted data, categorized according to the number and type of connected vehicle.
- Latency—Latency is defined as the time it takes to transfer information from the sensor to update the HD map [28].
The estimate includes two types of vehicles—Economy Model Cars and Mid-range Model Cars. Economy Cars are vehicles that are commonly available and contain several cameras and radars. Mid-range vehicles have more sensors than the Economy model (for example LiDAR).
The calculated data are categorized based on the number of Economy Model Cars (EMC) and Mid-range Model Cars (MRMC), where they focus on the total amount of data transmitted from the Upload/Download perspective, as in Figure 10. On the left side, we can see the total amount of data sent to the MSP Edge/Central Server, where the estimated generated data by 2022 represents a value of approximately 10.8 Petabytes per day. In terms of data received, it is 123 Terabytes per day. The idea of generating data in the next ten years is about 1/10 of the total data production of the world’s population, which is growing every year, and the latest estimates show that this value will increase rapidly [29].
These values already show a significant amount of data for transmission as well as processing for the various car manufacturers involved in advancing autonomous driving. The challenge for transport leaders as well as the professional community is to achieve reliability and meet the required hardware need to store the necessary data in the vehicle. However, we already know that traditional database systems such as relational databases and data processing in data warehouses, as well as data storage and analysis in these systems, are not sufficient [29]. Likewise, it is questionable whether systems (Hadoop, NoSQL, MapReduce and others), which are designed to process Big Data, are sufficient for storing, processing and transmitting data depending on efficiency and time.
Those estimates and the calculated constants are an integral part of autonomous vehicles. However, for autonomous vehicles to be integrated into road infrastructure, they need to be able to communicate with infrastructure as well as other V2X communication stakeholders. It should not be forgotten that it is necessary to design and implement the most suitable way of storing and transmitting information together with the analyzed estimates with sensors and information about HD maps. This means that the total amount of data transferred and processed will increase even more, and the need to know how to process Big Data in real time will increase even more. We have also failed to include the division of data into structured and unstructured, where the mentioned values in unstructured similarly require enormous computing power and sophisticated processing, for the purpose of deciding an autonomous vehicle on which the overall future of autonomous shared driving will depend in the Smart Mobility concept.
6. Discussion
To successfully implement Smart Mobility into everyday life, it is necessary to solve several general questions concerning the data viewpoint of this concept. Many of the technologies that are essential for Smart Mobility are only at the beginning of normal/daily use in many countries, for example 5G, Edge computing or HD maps.
These data need to be processed and analyzed. The processing time of operational data should be kept to a minimum so that the vehicle has sufficient time to respond adequately. The question therefore remains as to which architecture should be chosen. Using Edge computing and Cloud could serve as an appropriate combination for V2I communication. Edge Computing could serve mainly for the processing of operational and tactical data and Cloud for the processing and storing of strategic data.
In a year, a third level vehicle of autonomy will produce an estimated more than 5500 TB of data [8]. Not all data, such as the current state of the tank, must be sent outside the vehicle. It is this boundary that needs to be defined so that storage and communication channels are not flooded with more data than necessary, which could also slow down data transmission and processing. In addition to the data produced by vehicles, other data will also come from other sources, such as sensors in the road infrastructure, thus increasing the volume of data produced under V2I. It is important to specify the data that will be sent from the devices and at what level it will be processed. It is necessary to determine which data will be stored for a long time and which will not. In particular, the future use of stored data must be considered for this decision. While some data, such as traffic intensity on a specific section or accident, have long-term use, other data do not need to be stored and may be deleted or archived. It is important to select which data generated from devices or sensors we need for the correct and safe operation of autonomous driving in V2I communication, as well as in communication with other V2X elements. The question remains whether one of the possible solutions is the aggregation of data at a certain level, whether it is aggregation at the level of time, location, vehicle type or another parameter. Another possibility of solving the problem of the amount of data is the design of new methods of data compression or the adaptation of currently used algorithms. The aim should be to reduce the total amount of data and at the same time reduce the compression and decompression time required and, thus, affect the overall length of the transmission and processing.
In addition to the need for sufficient data storage capacity, it is crucial to ensure stable and fast information transfer. While driving, many dangerous situations arise that require the vehicle to react quickly and of which it must be informed in good time by means of messages. Minimizing the delay of these messages is key to road safety. For this reason, it is necessary to build 5G networks on the road infrastructure for the communication of individual elements of V2I communication. An important part of the AECC consortium is the use of HD maps essential for the accurate location of the vehicle to be able to work with information for the decision-making process. Reporting real-time objects from the dynamic layer represents a huge amount of information that will be sent to the MSP Edge/Central server and the updated version reloaded into the vehicle.
Another aspect of data communication is cybersecurity. Autonomous vehicles and drivers of not fully autonomous vehicles base their decisions on received information. It is important to ensure that autonomous vehicles and drivers of not fully autonomous vehicles receive real-time information that is necessary for the safety of all road users. This information is the main part of V2I communication. There are many types of cybersecurity attacks that need to be considered as this communication is mediated via the Internet. Possible attacks include for example, interrupting the communication, entering false information or removing information about current traffic-threatening situations. In addition to communication, it is also necessary to take into account of the cybersecurity of IoT devices that are implemented in vehicles.
7. Conclusions
This paper provides a data viewpoint on Smart Mobility, specifically V2I communication. The beginning of this paper is focused on data production of vehicles sensors, which are implemented in currently used vehicles. Described database solutions are not sufficient to handle the mentioned estimations of data production in real time. In the following part of this paper Smart Mobility concepts and their current goals in a near future are discussed. Then the focus is shifted to V2I communication, its possible communication technologies and the categorization of data that will be sent within V2I communication. Then, HD maps are considered as one of the key technologies for autonomous vehicles to receive information about road infrastructure and current traffic situations as they provide the precise location of the vehicle.
In the previous section were discussed the main concerns about the data aspects of V2I communication. Covering and satisfying all the needs of reliable, secure and fast communication between V2I components is a key role in achieving the goals of the Smart Mobility concept. Reaching the milestones defined in the Smart Mobility concept is a complex matter. Individual aspects of the data viewpoint of V2I communication present several challenges for the automotive industry as well as the professional community.
Author Contributions
Conceptualization, M.M. and K.P.; methodology, M.M. and K.P.; validation, B.B. and K.Z.; formal analysis, M.M. and K.P.; investigation, B.B.; resources, K.Z.; writing—original draft preparation, M.M., B.B. and K.P.; writing—review and editing, M.M., B.B. and K.P.; visualization, K.P.; project administration, B.B; funding acquisition, K.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This publication was realized with support of Operational Program Integrated Infrastructure 2014–2020 of the project: Innovative Solutions for Propulsion, Power and Safety Components of Transport Vehicles, code ITMS 313011V334, co-financed by the European Regional Development Fund. ![Applsci 11 10514 i001]()

Acknowledgments
Special thanks to University Science Park UNIZA for support during writing this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References and Note
- Faria, R.; Brito, L.; Baras, K.; Silva, J. Smart mobility: A survey. In Proceedings of the International Conference on Internet of Things for the Global Community (IoTGC), Funchal, Portugal, 10–13 July 2017; pp. 1–8. [Google Scholar]
- Taewoo, N.; Theresa, P. Conceptualizing smart city with dimensions of technology, people, and institutions. In ACM International Conference Proceeding Series, Proceedings of the 12th Annual International Conference on Digital Government Research, College Park, MD, USA, 12–15 June 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 282–291. [Google Scholar]
- Lacinák, M. Resilience of the Smart Transport System—Risks and Aims. Transp. Res. Procedia 2021, 55, 1635–1640. [Google Scholar] [CrossRef]
- Dániel, T.; Attila, A.; László, A.; Zoltan, R.; Ferenc, P. Safety and Security through the Design of Autonomous Intelligent Vehicle Systems and Intelligent Infrastructure in the Smart City. Interdiscip. Descr. Complex Syst. 2018, 16, 384–396. [Google Scholar]
- Mohammadian, H.D.; Rezaie, F. Blue-Green Smart Mobility Technologies as Readiness for Facing Tomorrow’s Urban Shock toward the World as a Better Place for Living (Case Studies: Songdo and Copenhagen). Technologies 2020, 8, 39. [Google Scholar] [CrossRef]
- El-Rewini, Z.; Sadatsharan, K.; Flora Selvaraj, D.; Jose Plathottam, S.; Ranganathan, P. Cybersecurity challenges in vehicular communications. Veh. Commun. 2020, 23, 100214. [Google Scholar] [CrossRef]
- European Commission. Sustainable and Smart Mobility Strategy—Putting European Transport on Track for the Future. 2020. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A52020DC0789 (accessed on 15 August 2021).
- Autonomous Cars Generate More than 300 TB of Data per Year. Available online: https://www.tuxera.com/blog/autonomous-cars-300-tb-of-data-per-year/ (accessed on 2 July 2021).
- Acharjya, D.P.; Kauser, A.P. A Survey on Big Data Analytics: Challenges, Open Research Issues and Tools. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 511–518. [Google Scholar]
- El-Seoud, S.; El-Sofany, H.; Abdelfattah, M.; Reham, M. Big Data and Cloud Computing: Trends and Challenges. Int. J. Interact. Mob. Technol. 2017, 11, 34–52. [Google Scholar] [CrossRef]
- Tanweer, A. Cloud Computing and its role in the Information Technology. IAIC Trans. Sustain. Digit. Innov. 2020, 1, 108–117. [Google Scholar]
- Yu, W. A Survey on the Edge Computing for the Internet of Things. IEEE Access 2018, 6, 6900–6919. [Google Scholar] [CrossRef]
- Internal Documents of Ministry of Transport and Construction of the Slovak Republic.
- Orlowski, A.; Romanowska, P. Smart Cities Concept: Smart Mobility Indicator. Cybern. Syst. 2019, 50, 118–131. [Google Scholar] [CrossRef]
- Preparing for New Mobility: Writing Effective Resolutions. Available online: https://altago.com/projects/preparing-new-mobility-writing-effective-resolutions/ (accessed on 2 September 2021).
- What is an Autonomous Car? Available online: https://www.synopsys.com/automotive/what-is-autonomous-car.html (accessed on 2 September 2021).
- Levels of Driving Automation. Available online: https://epthinktank.eu/2016/01/11/automated-vehicles-in-the-eu/levels-of-driving-automation/ (accessed on 3 September 2021).
- Road Accident Fatalities—Statistics by Type of Vehicle. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Road_accident_fatalities_-_statistics_by_type_of_vehicle (accessed on 2 September 2021).
- The 6 Levels of Vehicle Autonomy Explained. Available online: https://www.synopsys.com/automotive/autonomous-driving-levels.html (accessed on 8 September 2021).
- Vaishali, K.D.; Pradhan, S.N. V2V communication survey wireless technology. Netw. Internet Archit. 2012, 3, 373–390. [Google Scholar]
- Malik, R.Q.; Alsattar, H.A.; Ramli, K.N.; Zaidan, B.B.; Zaidan, A.A.; Kareem, Z.H.; Ameen, H.A.; Garfan, S.; Mohammed, A.; Zaidan, R.A. Mapping and Deep Analysis of Vehicle-to-Infrastructure Communication Systems: Coherent Taxonomy, Datasets, Evaluation and Performance Measurements, Motivations, Open Challenges, Recommendations, and Methodological Aspects. IEEE Access 2019, 7, 126753–126772. [Google Scholar] [CrossRef]
- Péter, G.; Zsolt, S.; Szilárd, A. Highly Automated Vehicle Systems. Available online: https://mogi.bme.hu/TAMOP/jarmurendszerek_iranyitasa_angol/index.html (accessed on 8 July 2021).
- Belanovic, P.; Valerio, D.; Paier, A.; Zemen, T.; Ricciato, F.; Macklenbrauker, C.F. On Wireless Links for Vehicle-to-Infrastructure Communications. IEEE Trans. Veh. Technol. 2010, 59, 269–282. [Google Scholar] [CrossRef]
- Zhigang, X.; Xiaochi, L.; Xiangmo, Z.; Michael, Z.; Zhongren, W. DSRC versus 4G-LTE for Connected Vehicle Applications: A Study on Field Experiments of Vehicular Communication Performance. J. Adv. Transp. 2017, 2017, 3–7. [Google Scholar]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L.; Li, W. A Vision of C-V2X: Technologies, Field Testing, and Challenges with Chinese Development. IEEE Internet Things J. 2020, 7, 3872–3881. [Google Scholar] [CrossRef] [Green Version]
- Philip, B.V.; Alpcan, T.; Jin, J.; Palaniswami, M. Distributed Real-Time IoT for Autonomous Vehicles. IEEE Trans. Ind. Inform. 2019, 15, 1131–1140. [Google Scholar] [CrossRef]
- European Commission. Advanced Technologies for Industry. 2020. Available online: https://ati.ec.europa.eu/reports/product-watch/iot-components-connected-and-autonomous-vehicles (accessed on 17 August 2021).
- Automotive Edge Computing Consortium. Operational Behavior of a High Definition Map Application White Paper. 2020. Available online: https://aecc.org/wp-content/uploads/2020/07/Operational_Behavior_of_a_High_Definition_Map_Application.pdf (accessed on 15 September 2021).
- Rawat, B.; Samriya, J.K. A study on challenges of big data and their approaches in present environment. In Algorithms for Intelligent Systems; Mer, K.K.S., Semwal, V.B., Begawan, V., Crespo, R.G., Eds.; Springer: Singapore, 2021; pp. 483–484. [Google Scholar]
Figure 1.
Comparison of total vehicle data production by autonomy level according to [8].
Figure 1.
Comparison of total vehicle data production by autonomy level according to [8].

Figure 2.
Shared Transport Smart Mobility Objective based on [15].
Figure 2.
Shared Transport Smart Mobility Objective based on [15].

Figure 3.
Classification and description of individual levels of autonomy according to SAE [17].
Figure 3.
Classification and description of individual levels of autonomy according to SAE [17].

Figure 4.
Number of road accident deaths in Europe based on [18].
Figure 4.
Number of road accident deaths in Europe based on [18].

Figure 5.
IoT devices integrated in vehicles.

Figure 6.
Categorization of data collected within V2I.

Figure 7.
HD maps layers based on [28].
Figure 7.
HD maps layers based on [28].

Figure 8.
The flow of information from the vehicle to the complete updating of HD maps based on [28].
Figure 8.
The flow of information from the vehicle to the complete updating of HD maps based on [28].

Figure 9.
Patterns A and B of updating data of HD maps based on [28].
Figure 9.
Patterns A and B of updating data of HD maps based on [28].

Figure 10.
The calculated amount of transferred data based on [28].
Figure 10.
The calculated amount of transferred data based on [28].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Domains according to the categorization of data collected within V2I according to [13].
Table 1.
Domains according to the categorization of data collected within V2I according to [13].
| Domain | Source | Method of Collection | Character | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Reports from People | Manufacturing Information | Third Party Information | Systems Administrated by the State | Sensors in the Infrastructure | Sensors in Vehicles | Information Systems | Reports from People | Operational | Tactical | Strategic | |
| Intelligent vehicles | |||||||||||
| Autonomous vehicles | • | • | • | ||||||||
| Vehicle’s ability to communicate | • | • | • | ||||||||
| Assistance systems | • | • | • | ||||||||
| Communication of V2I | • | • | • | • | • | ||||||
| Intelligent infrastructure | |||||||||||
| Intelligent systems | • | • | • | • | • | • | • | • | |||
| Road infrastructure data | • | • | • | • | |||||||
| Communication of I2V | • | • | • | • | • | • | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bučko, B.; Michálek, M.; Papierniková, K.; Zábovská, K. Smart Mobility and Aspects of Vehicle-to-Infrastructure: A Data Viewpoint. Appl. Sci. 2021, 11, 10514. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210514
AMA Style
Bučko B, Michálek M, Papierniková K, Zábovská K. Smart Mobility and Aspects of Vehicle-to-Infrastructure: A Data Viewpoint. Applied Sciences. 2021; 11(22):10514. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210514
Chicago/Turabian StyleBučko, Boris, Martin Michálek, Katarína Papierniková, and Katarína Zábovská. 2021. "Smart Mobility and Aspects of Vehicle-to-Infrastructure: A Data Viewpoint" Applied Sciences 11, no. 22: 10514. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210514
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.