
Strategies for 3D Modelling of Buildings from Airborne Laser Scanner and Photogrammetric Data Based on Free-Form and Model-Driven Methods: The Case Study of the Old Town Centre of Bordeaux (France)


Abstract
:1. Introduction
2. Materials and Methods
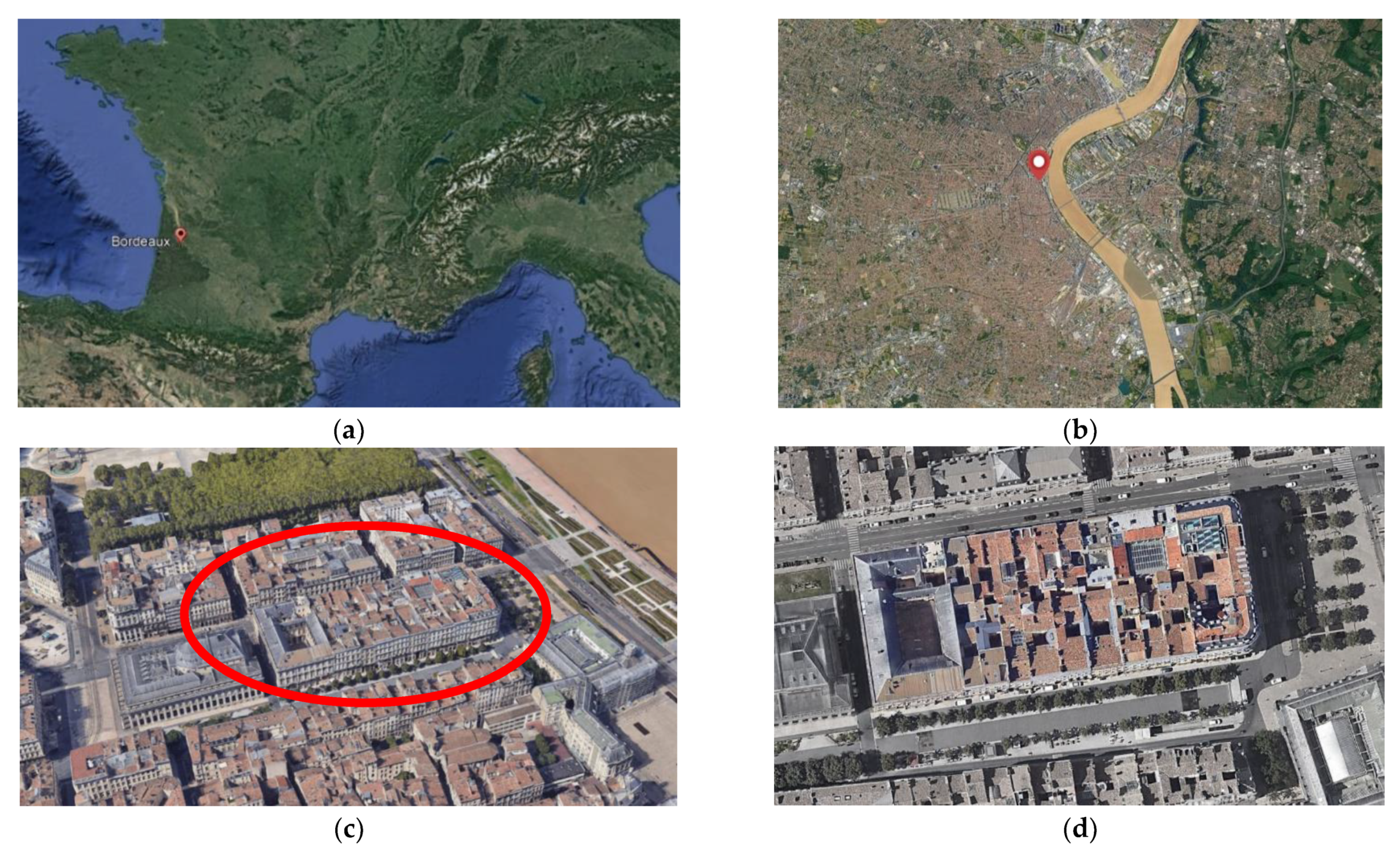
2.1. The Case Study
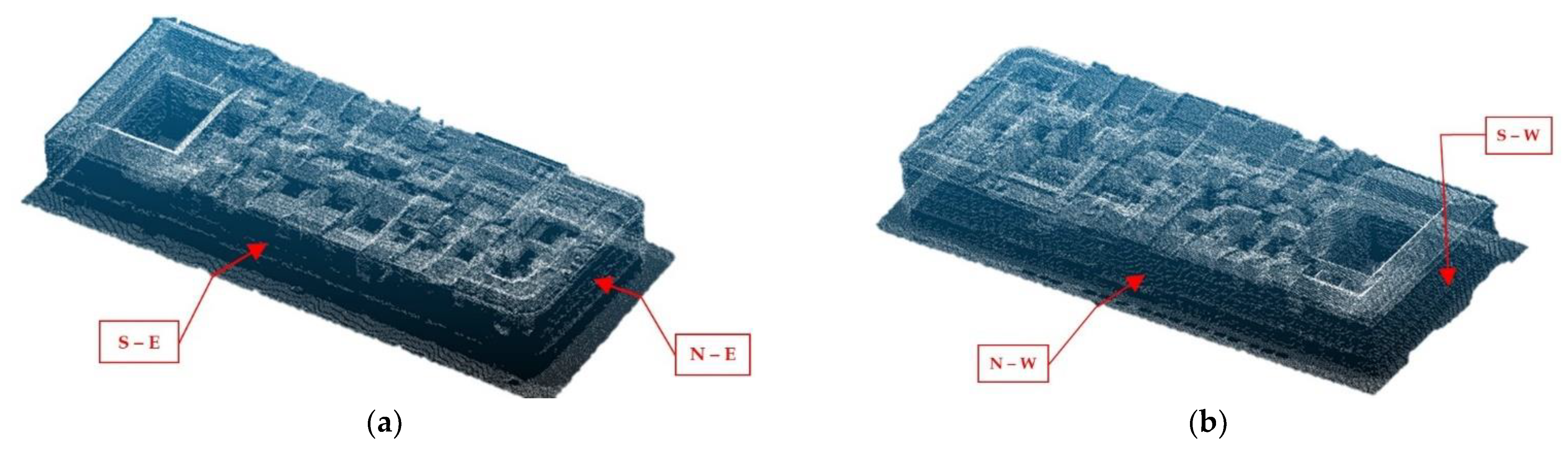
2.2. Dataset
- Pulse repetition frequency up to 700 KHz;
- Return pulses programmable up to 15 returns, including intensity, pulse width, area;
- Under curve and skewness waveform attributes;
- Full waveform recording option at down-sampled rates;
- Oblique scanner, with various scan patterns;
- Real time LiDAR waveform analysis, including waveform attribute capture.
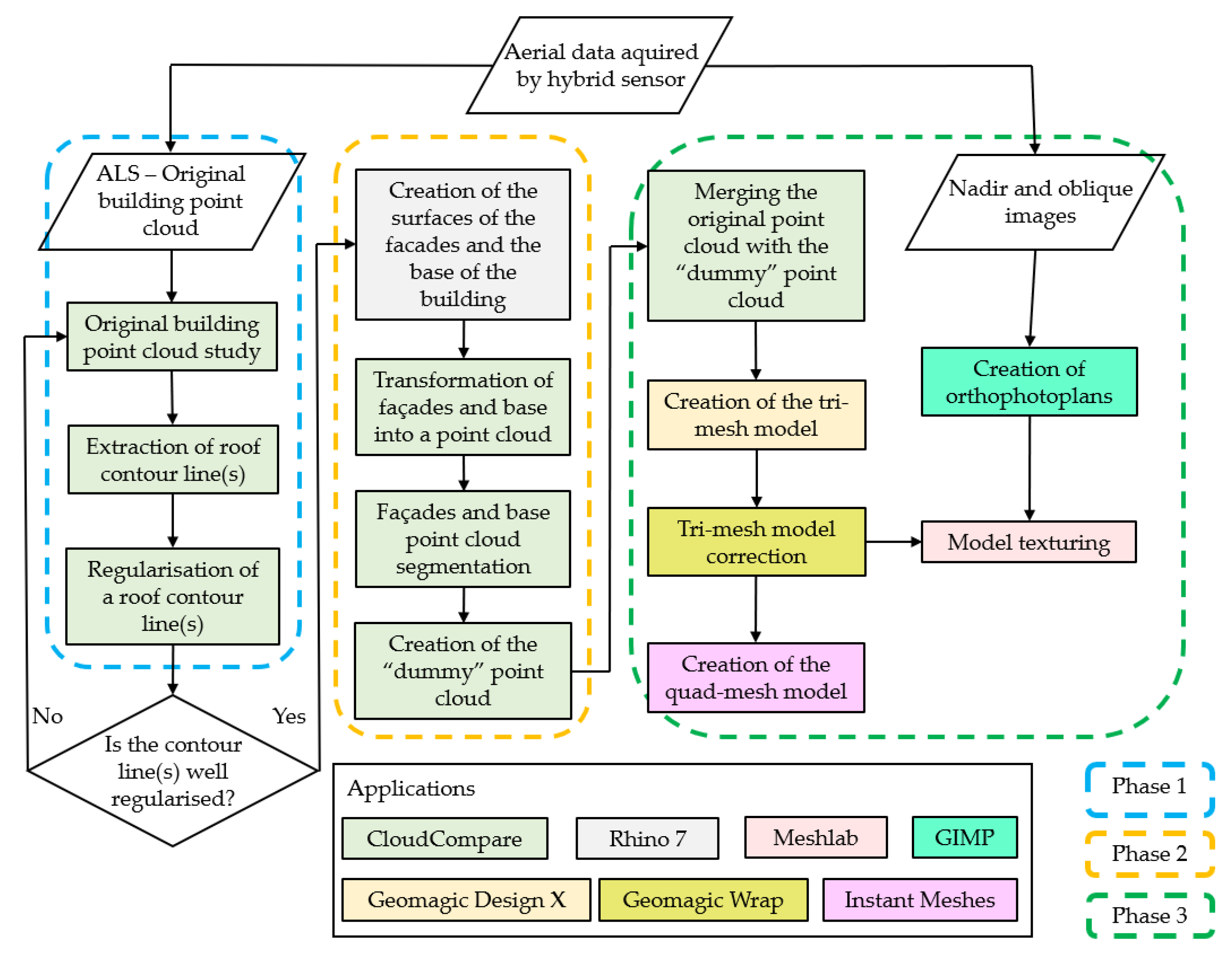
2.3. Data-Driven Free-Form Modelling
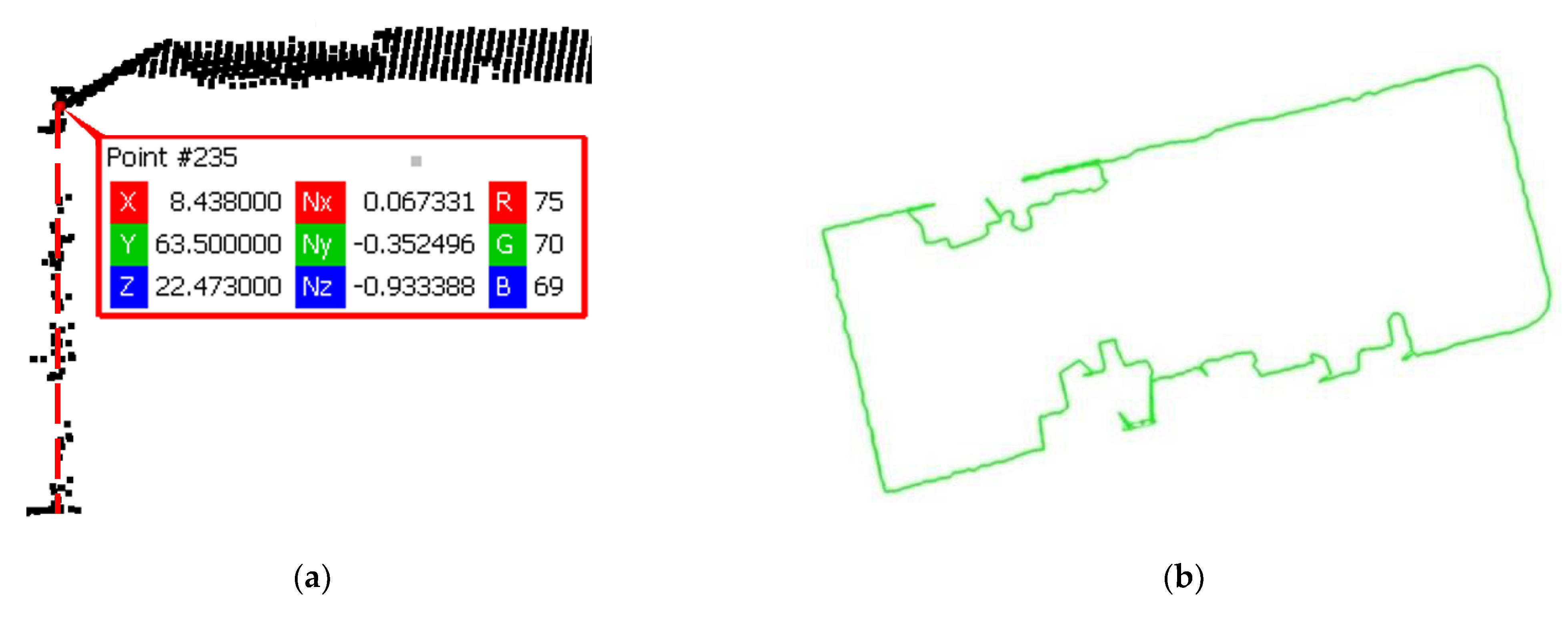
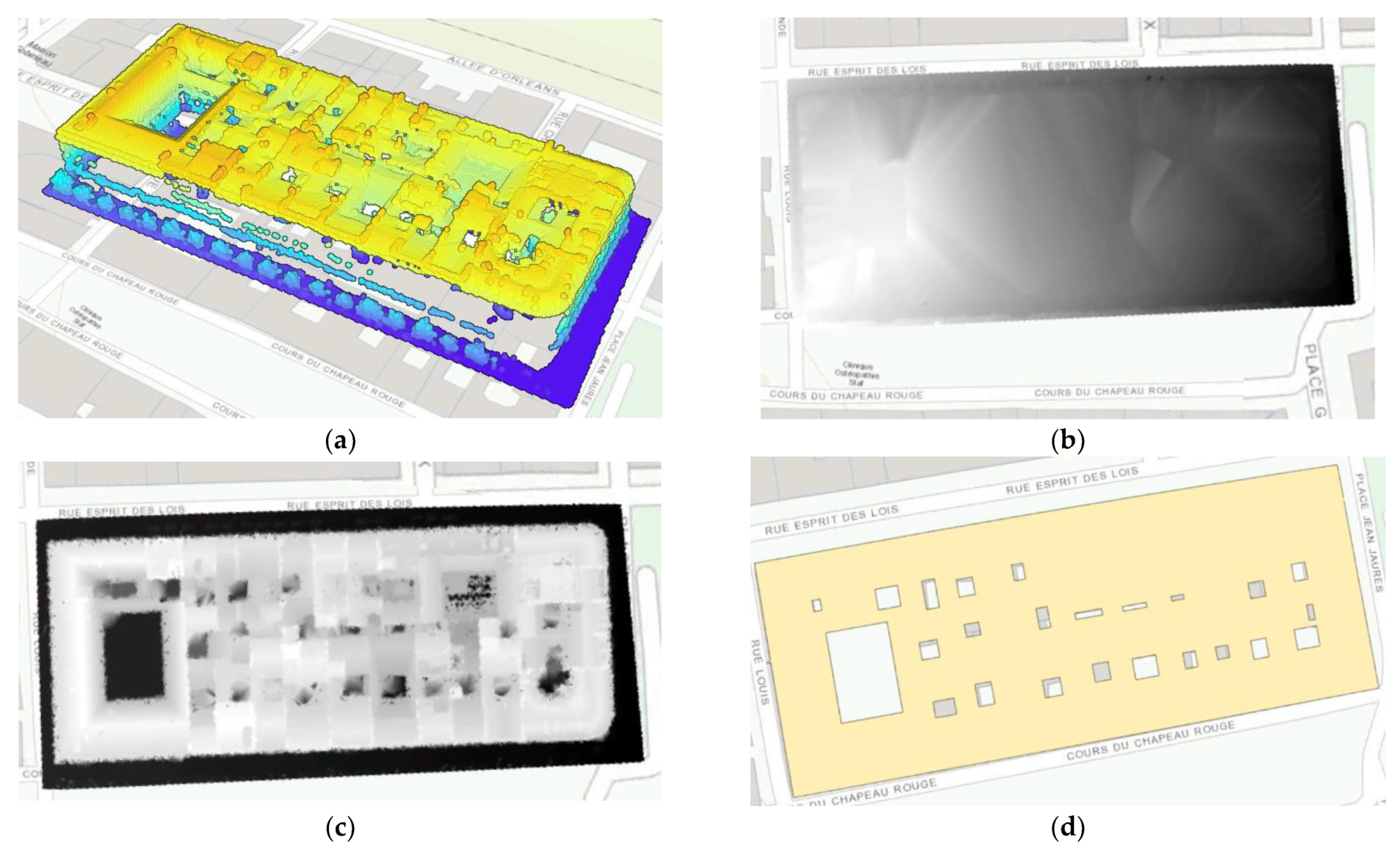
2.3.1. Phase 1: Extraction and Regularisation of Contour Lines
- Conversion of the contour line into a mesh plane (projection dimension: Z) where the contour line determines the edges of the output triangles (CloudCompare: Contour plot (polylines) to mesh—Figure 8b);
- Creation of a flat point cloud from the mesh surface (CloudCompare: Sample points on a mesh—Figure 8c);
- Extraction of a new regularised contour line from the flat point cloud (CloudCompare: Cross Section—Figure 8d).
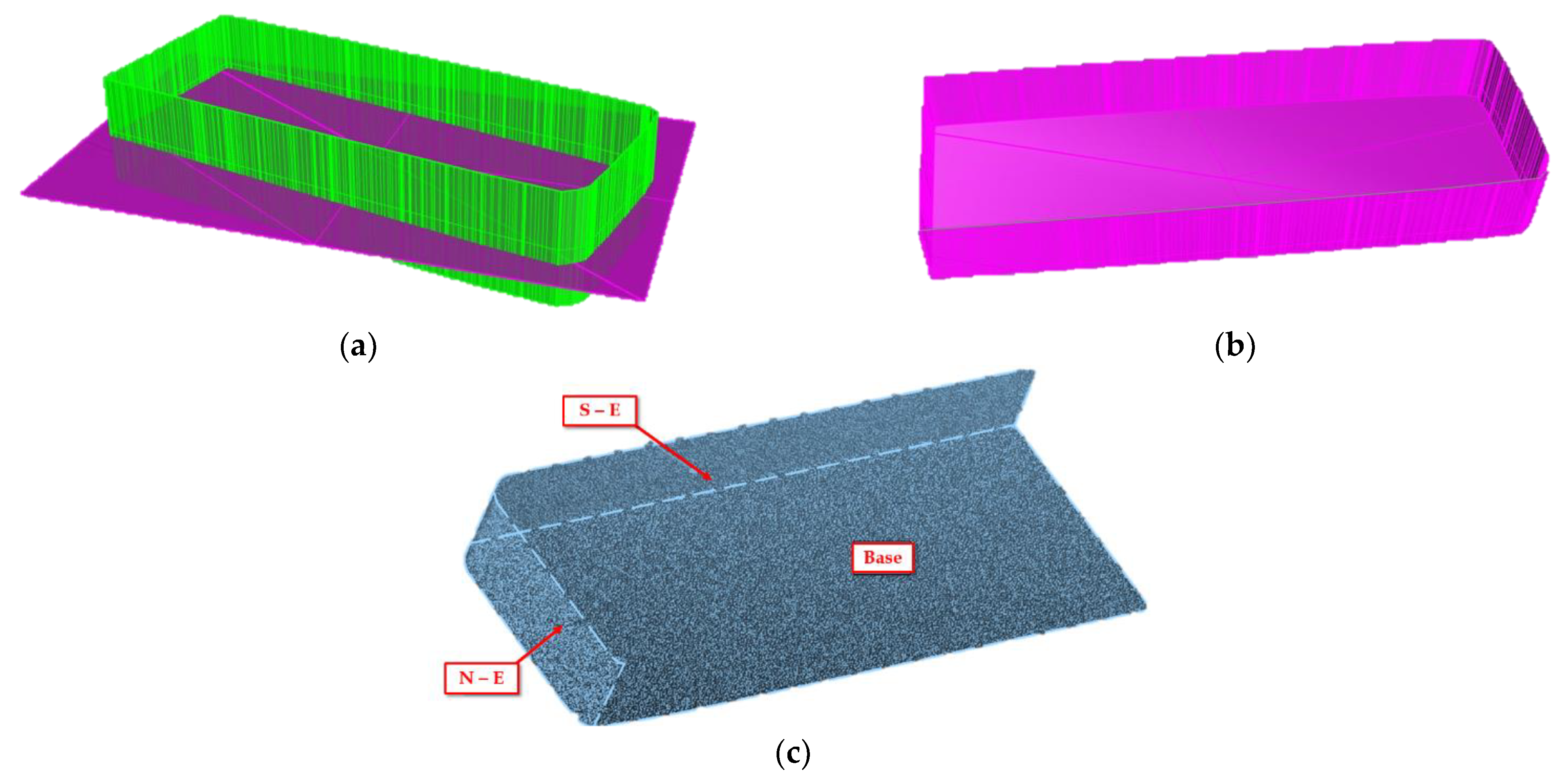
2.3.2. Phase 2: Creation of the “Dummy” Point Cloud
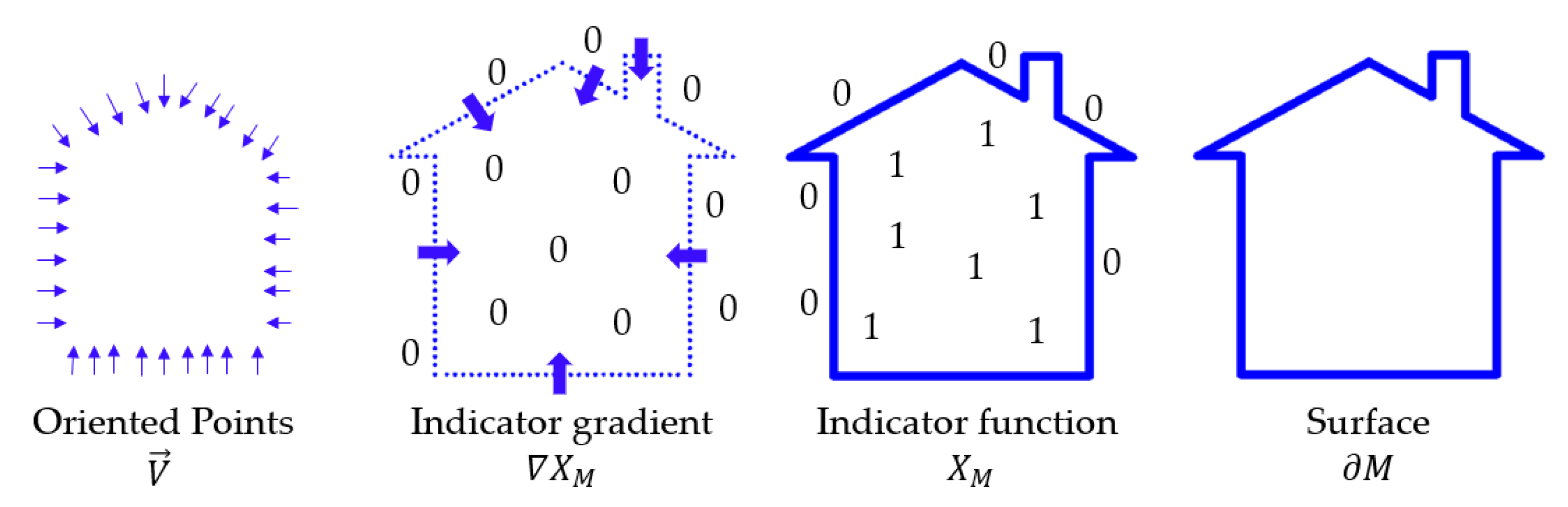
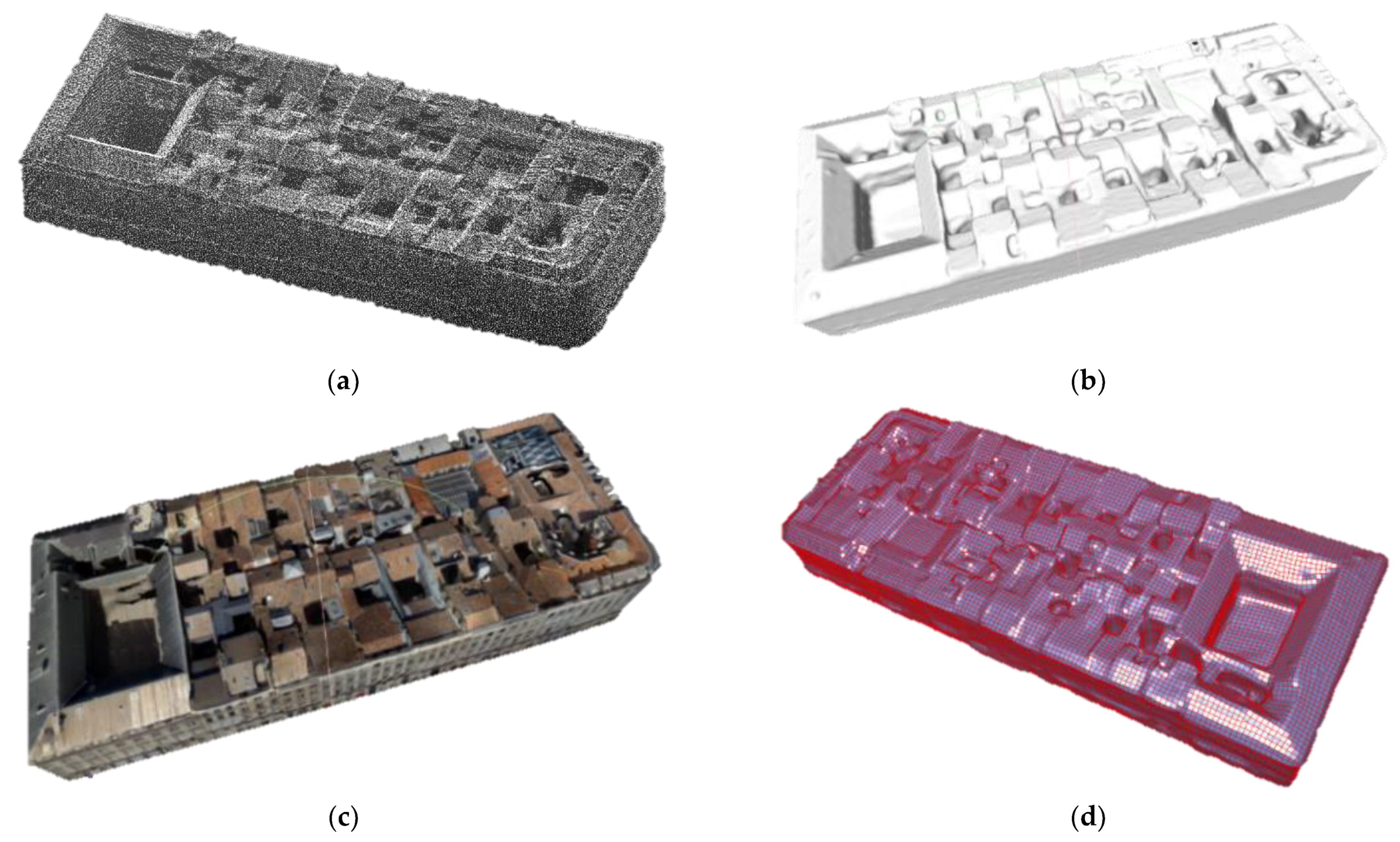
2.3.3. Phase 3: Generation of the Mesh Model
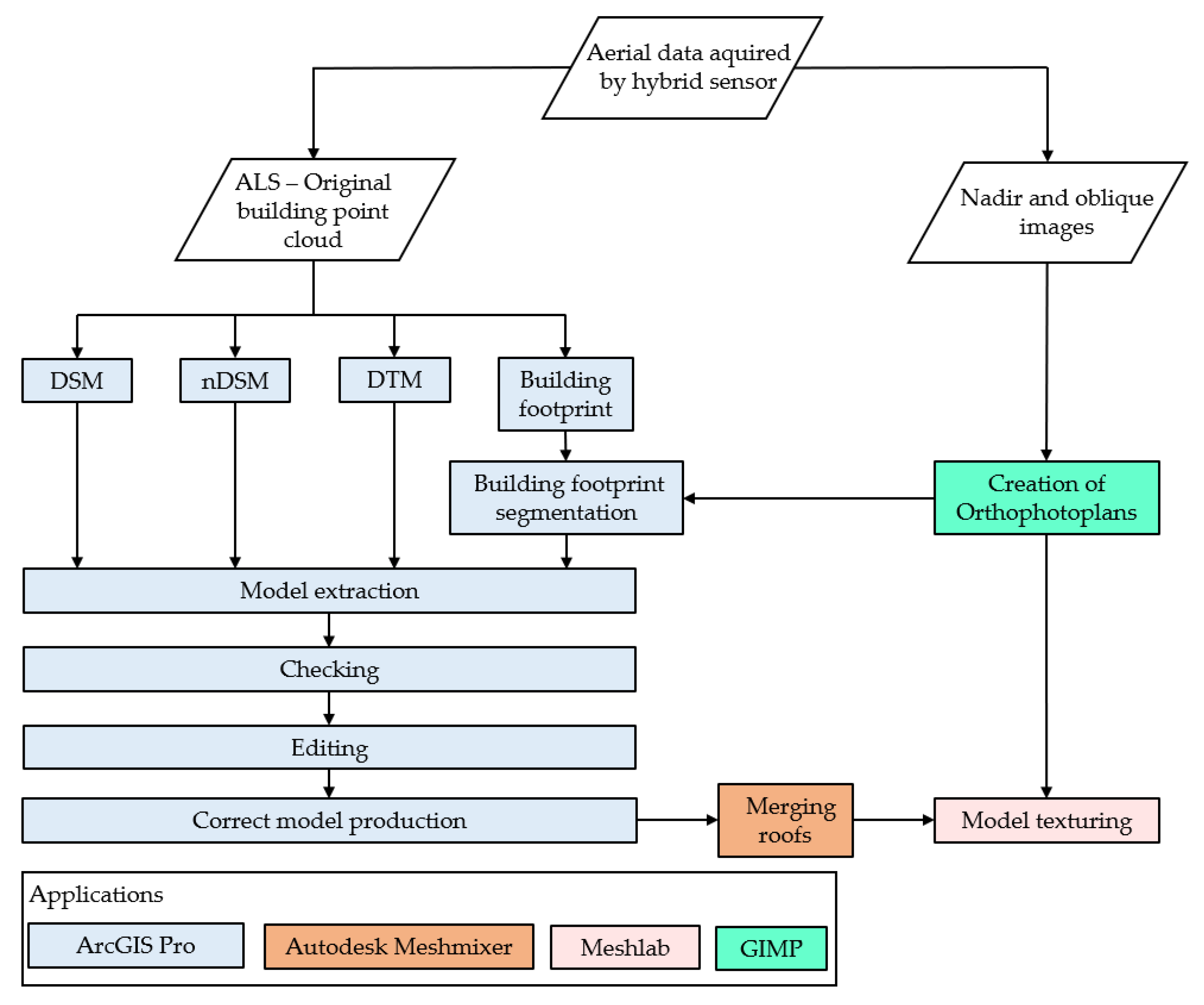
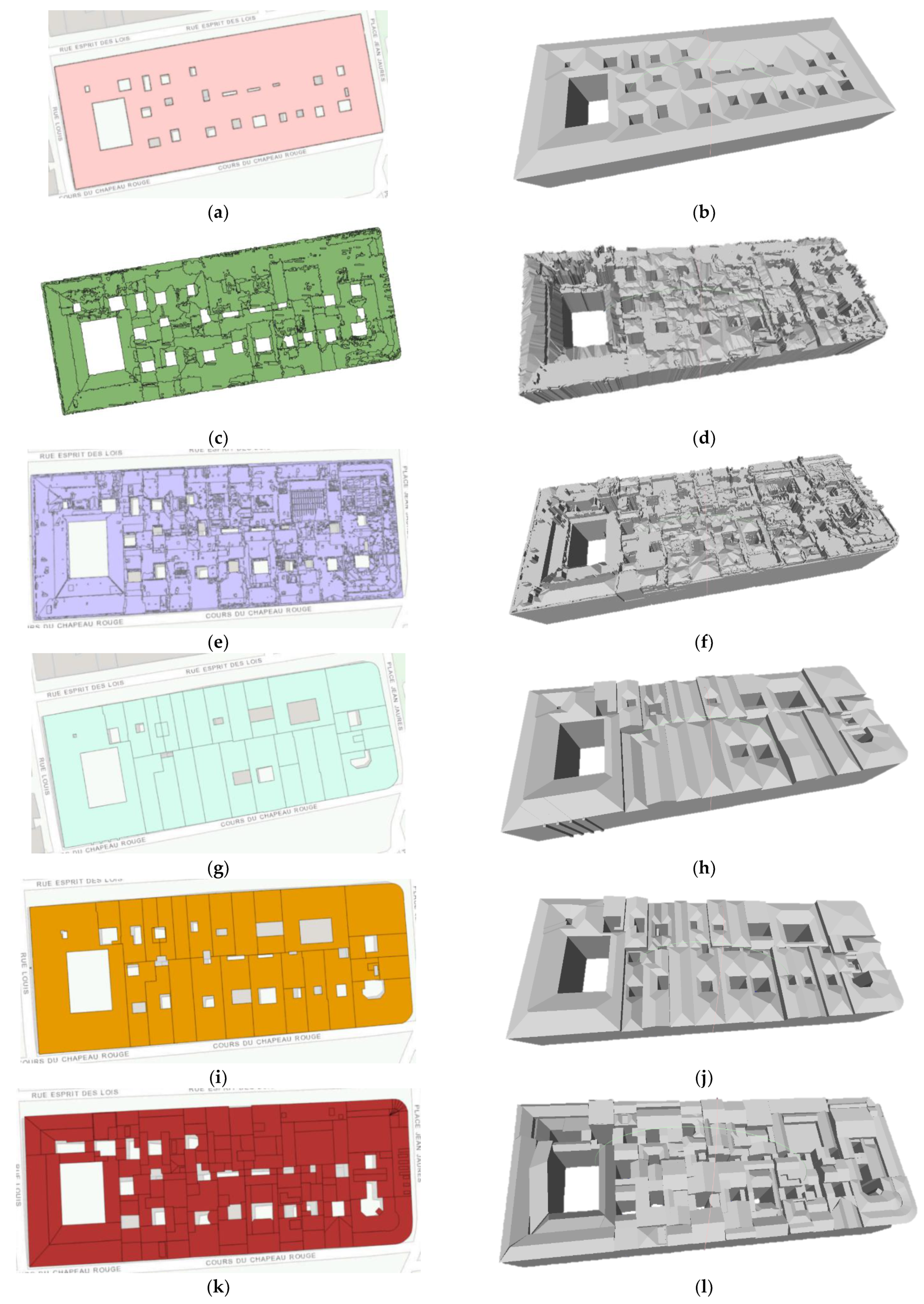
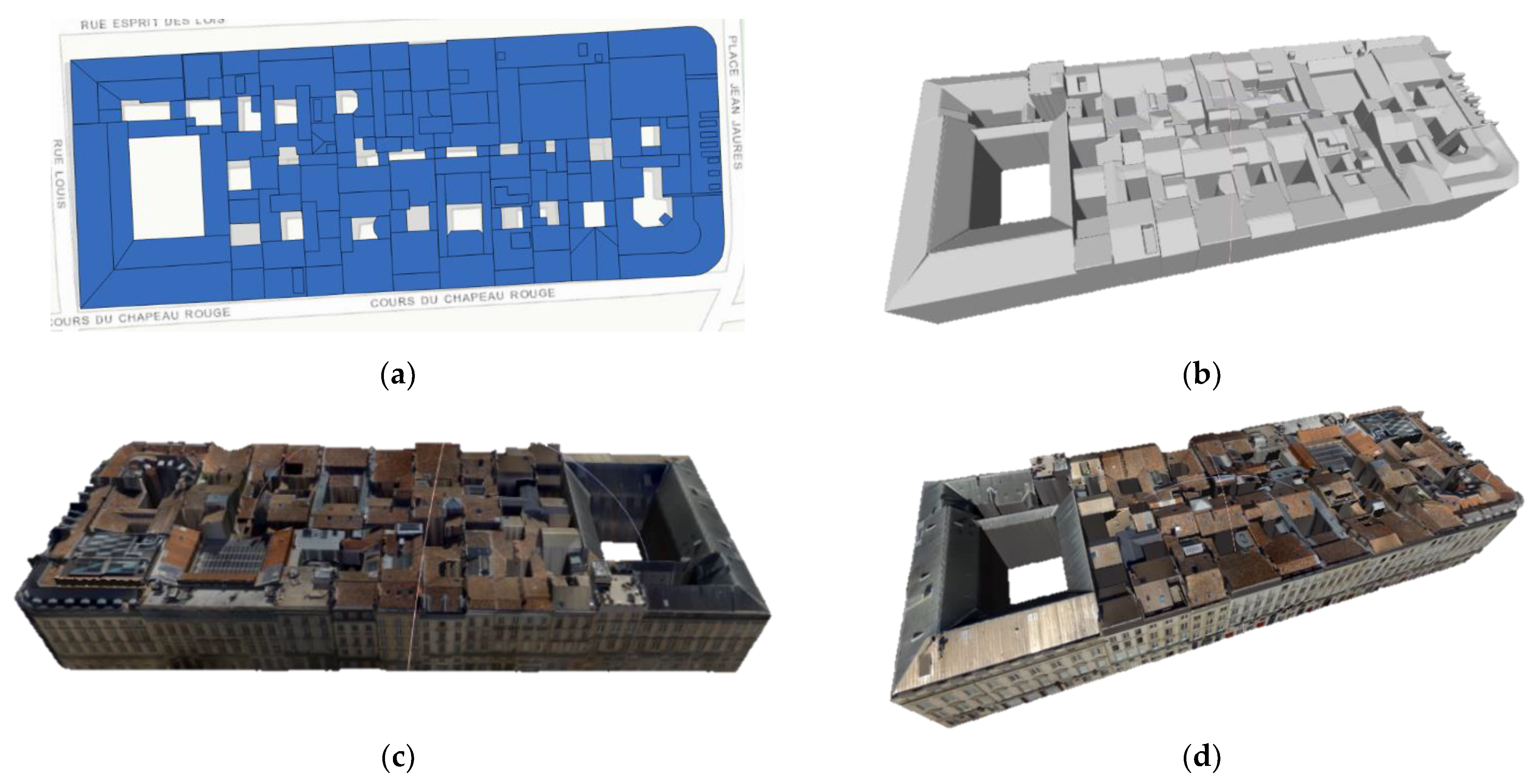
2.4. Model-Driven Modelling
- Segmentation based on DSM;
- Segmentation based on the point cloud;
- Automatic segmentation based on nadir images;
- Segmented building footprint from OpenStreetMap—OSM;
- Segmentation based on the OSM features;
- Interactive segmentation based on nadir images.
- Building footprint correction based on DSM (3D Basemaps: Modify Roof Tools);
- Parametric correction of the roofs through the modification of one or more fields of the attributes table (RoofForm, RoofDirAdjust, BldgHeight, EaveHeight).
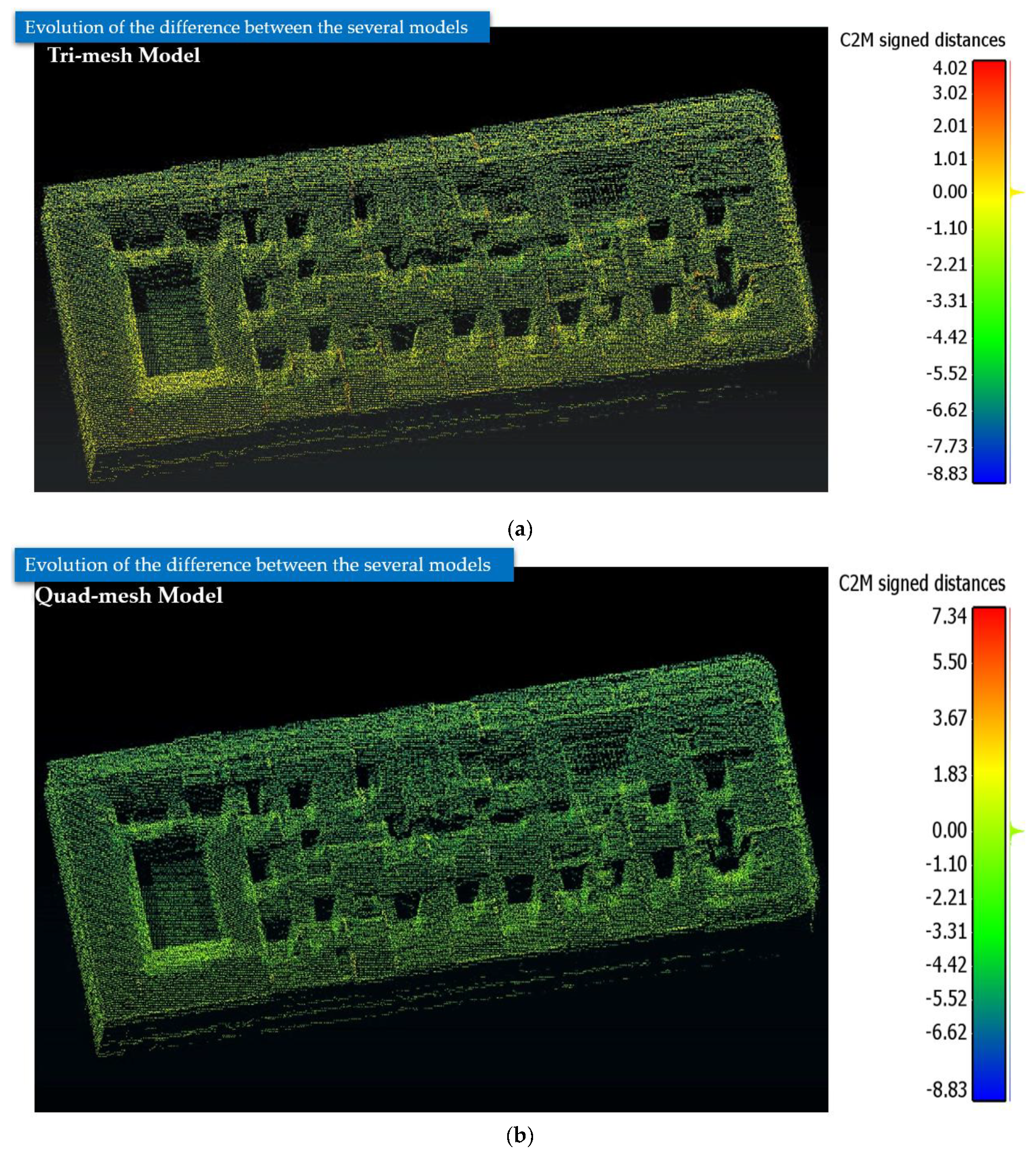
3. Results
4. Discussion
- Regularisation of the roof contour lines by conversion into a mesh plane, in phase 1;
- Production of a “dummy” point cloud segmented according to the surveyed façades, in phase 2;
- Quad-mesh simplification as the preferred method for simplifying 3D models, in phase 3.
5. Conclusions
- Modelling buildings with any kind of shape using a parametric method;
- The possibility of choosing which building façades to model and which to reconstruct;
- To build photorealistic 3D models through the use of hybrid sensors;
- To obtain light and manageable 3D models without loss of accuracy and precision.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Original Building | Formal Result | Mean C2M [m] | Standard Deviation C2M [m] |
|---|---|---|---|---|
| D.S.1 |  |  | 0.029 | 0.334 |
| D.S.2 |  |  | 0.098 | 0.351 |
| D.S.3 | +  |  | 0.088 | 0.651 |
| D.S.4 |  |  | 0.008 | 0.252 |
References
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Bitelli, G.; Girelli, V.A.; Lambertini, A. Integrated Use of Remote Sensed Data and Numerical Cartography for The Generation of 3D City Models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 97–102. [Google Scholar] [CrossRef] [Green Version]
- Pepe, M.; Costantino, D.; Alfio, V.S.; Angelini, M.G.; Restuccia Garofalo, A. A CityGML Multiscale Approach for the Conservation and Management of Cultural Heritage: The Case Study of the Old Town of Taranto (Italy). ISPRS Int. J. Geo-Inf. 2020, 9, 449. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D.; Alfio, V.S.; Vozza, G.; Cartellino, E. A Novel Method Based on Deep Learning, GIS and Geomatics Software for Building a 3D City Model from VHR Satellite Stereo Imagery. ISPRS Int. J. Geo-Inf. 2021, 10, 697. [Google Scholar] [CrossRef]
- Wang, R.; Peethambaran, J.; Chen, D. Lidar point clouds to 3-D urban models: A review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 606–627. [Google Scholar] [CrossRef]
- Musialski, P.; Wonka, P.; Aliaga, D.G.; Wimmer, M.; Van Gool, L.; Purgathofer, W. A survey of urban reconstruction. Comput. Graph. Forum 2013, 32, 146–177. [Google Scholar] [CrossRef]
- Wang, R. 3D building modeling using images and LiDAR: A review. Int. J. Image Data Fusion 2013, 4, 273–292. [Google Scholar] [CrossRef]
- Haala, N.; Kada, M. An update on automatic 3D building reconstruction. ISPRS J. Photogramm. Remote Sens. 2010, 65, 570–580. [Google Scholar] [CrossRef]
- Brenner, C. Building reconstruction from images and laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2005, 6, 187–198. [Google Scholar] [CrossRef]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ebolese, D.; Dardanelli, G.; Lo Brutto, M.; Sciortino, R. 3D survey in complex archaeological environments: An approach by terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 325–330. [Google Scholar] [CrossRef] [Green Version]
- Buyukdemircioglu, M.; Kocaman, S.; Isikdag, U. Semi-automatic 3D city model generation from large-format aerial images. ISPRS Int. J. Geo-Inf. 2018, 7, 339. [Google Scholar] [CrossRef] [Green Version]
- Borrmann, D.; Elseberg, J.; Lingemann, K.; Nüchter, A. The 3d hough transform for plane detection in point clouds: A review and a new accumulator design. 3D Res. 2011, 2, 3. [Google Scholar] [CrossRef]
- Vosselman, G. Building reconstruction using planar faces in very high density height data. Int. Arch. Photogramm. Remote Sens. 1999, 32, 87–94. [Google Scholar]
- Maas, H.G.; Vosselman, G. Two algorithms for extracting building models from raw laser altimetry data. ISPRS J. Photogramm. Remote Sens. 1999, 54, 153–163. [Google Scholar] [CrossRef]
- Sohn, G.; Huang, X.; Tao, V. Using a binary space partitioning tree for reconstructing polyhedral building models from airborne lidar data. Photogramm. Eng. Remote Sens. 2008, 74, 1425–1438. [Google Scholar] [CrossRef] [Green Version]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [Green Version]
- Nan, L.; Wonka, P. Polyfit: Polygonal surface reconstruction from point clouds. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2353–2361. [Google Scholar]
- Bowyer, A. Computing dirichlet tessellations. Comput. J. 1981, 24, 162–166. [Google Scholar] [CrossRef] [Green Version]
- Watson, D.F. Computing the n-dimensional Delaunay tessellation with application to Voronoi polytopes. Comput. J. 1981, 24, 167–172. [Google Scholar] [CrossRef] [Green Version]
- Girardeau-Montaut, D. Cloud Compare; EDF R&D Telecom ParisTech: Paris, France, 2016. [Google Scholar]
- Cignoni, P.; Callieri, M.; Corsini, M.; Dellepiane, M.; Ganovelli, F.; Ranzuglia, G. Meshlab: An open-source mesh processing tool. In Proceedings of the Eurographics Italian Chapter Conference, Eurographics, Salerno, Italy, 1 January 2008; Volume 2008, pp. 129–136. [Google Scholar]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson surface reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, Cagliari, Italy, 26–28 June 2006; Volume 7. [Google Scholar]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. (ToG) 2013, 32, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Jakob, W.; Tarini, M.; Panozzo, D.; Sorkine-Hornung, O. Instant field-aligned meshes. ACM Trans. Graph. 2015, 34, 189:1–189:5. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D.; Alfio, V.S.; Restuccia, A.G.; Papalino, N.M. Scan to BIM for the digital management and representation in 3D GIS environment of cultural heritage site. J. Cult. Herit. 2021, 50, 115–125. [Google Scholar] [CrossRef]
- Costantino, D.; Pepe, M.; Restuccia, A.G. Scan-to-HBIM for conservation and preservation of Cultural Heritage building: The case study of San Nicola in Montedoro church (Italy). Appl. Geomat. 2021, 1–15. [Google Scholar] [CrossRef]
- Schroeder, W.J.; Zarge, J.A.; Lorensen, W.E. Decimation of triangle meshes. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, Chicago, IL, USA, 27–31 July 1992; pp. 65–70. [Google Scholar]
- Li, M.; Nan, L. Feature-preserving 3D mesh simplification for urban buildings. ISPRS J. Photogramm. Remote Sens. 2021, 173, 135–150. [Google Scholar] [CrossRef]
- Pepe, M.; Costantino, D. Techniques, tools, platforms and algorithms in close range photogrammetry in building 3D model and 2D representation of objects and complex architectures. Comput. Aided Des. Appl. 2020, 18, 42–65. [Google Scholar] [CrossRef]
- Zhou, Q.Y.; Neumann, U. 2.5D dual contouring: A robust approach to creating building models from aerial lidar point clouds. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2010; pp. 115–128. [Google Scholar]
- Vo, H.T.; Callahan, S.P.; Lindstrom, P.; Pascucci, V.; Silva, C.T. Streaming simplification of tetrahedral meshes. IEEE Trans. Vis. Comput. Graph. 2006, 13, 145–155. [Google Scholar] [CrossRef] [Green Version]
- Ju, T.; Losasso, F.; Schaefer, S.; Warren, J. Dual contouring of hermite data. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques, San Antonio, TX, USA, 23–26 July 2002; pp. 339–346. [Google Scholar]
- Bouzas, V.; Ledoux, H.; Nan, L. Structure-aware Building Mesh Polygonization. ISPRS J. Photogramm. Remote Sens. 2020, 167, 432–442. [Google Scholar] [CrossRef]
- Song, J.; Wu, J.; Jiang, Y. Extraction and reconstruction of curved surface buildings by contour clustering using airborne LiDAR data. Optik 2015, 126, 513–521. [Google Scholar] [CrossRef]
- Song, J.; Xia, S.; Wang, J.; Chen, D. Curved buildings reconstruction from airborne LiDAR data by matching and deforming geometric primitives. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1660–1674. [Google Scholar] [CrossRef]
- Lafarge, F.; Mallet, C. Creating large-scale city models from 3D-point clouds: A robust approach with hybrid representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Rashidi, M.; Mohammadi, M.; Sadeghlou Kivi, S.; Abdolvand, M.M.; Truong-Hong, L.; Samali, B. A Decade of Modern Bridge Monitoring Using Terrestrial Laser Scanning: Review and Future Directions. Remote Sens. 2020, 12, 3796. [Google Scholar] [CrossRef]
- Mohammadi, M.; Rashidi, M.; Mousavi, V.; Karami, A.; Yu, Y.; Samali, B. Quality Evaluation of Digital Twins Generated Based on UAV Photogrammetry and TLS: Bridge Case Study. Remote Sens. 2021, 13, 3499. [Google Scholar] [CrossRef]
- Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2013, 79, 29–43. [Google Scholar] [CrossRef]
- Poullis, C.; You, S. Photorealistic large-scale urban city model reconstruction. IEEE Trans. Vis. Comput. Graph. 2008, 15, 654–669. [Google Scholar] [CrossRef] [PubMed]
- Poullis, C.; You, S.; Neumann, U. Rapid creation of large-scale photorealistic virtual environments. In Proceedings of the IEEE Virtual Reality Conference, Reno, NV, USA, 8–12 March 2008; pp. 153–160. [Google Scholar]
- Henn, A.; Gröger, G.; Stroh, V.; Plümer, L. Model driven reconstruction of roofs from sparse LIDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 76, 17–29. [Google Scholar] [CrossRef]
- Sims, B.; Hedges, D.; van Maren, G. Creating and Maintaining Your 3D Basemap. In Esri User Conference Technical Workshops; ESRI: San Diego, CA, USA, 2017. [Google Scholar]
- Pepe, M.; Fregonese, L.; Crocetto, N. Use of SfM-MVS approach to nadir and oblique images generated throught aerial cameras to build 2.5D map and 3D models in urban areas. Geocarto Int. 2019, 1–22. [Google Scholar] [CrossRef]
- Li, Z.; Xiang, H.Y.; Li, Z.Q.; Han, B.A.; Huang, J.J. The research of reverse engineering based on geomagic studio. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Freienbach, Switzerland, 2013; Volume 365, pp. 133–136. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2007; Volume 26, pp. 214–226. [Google Scholar]
- Lindsay, J.B. The whitebox geospatial analysis tools project and open-access GIS. In Proceedings of the GIS Research UK 22nd Annual Conference, The University of Glasgow, GISRUK, Liverpool, UK, 16 April 2014; pp. 16–18. [Google Scholar]
- Girindran, R.; Boyd, D.S.; Rosser, J.; Vijayan, D.; Long, G.; Robinson, D. On the reliable generation of 3D city models from open data. Urban Sci. 2020, 4, 47. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Czerwinski, A.; Nagel, C. OpenGIS® City Geography Markup Language (CityGML) Implementation Specification. 2008. Available online: http://www.opengeospatial.org/legal (accessed on 20 May 2021).
- Over, M.; Schilling, A.; Neubauer, S.; Zipf, A. Generating web-based 3D City Models from OpenStreetMap: The current situation in Germany. Comput. Environ. Urban Syst. 2010, 34, 496–507. [Google Scholar] [CrossRef]
- Fan, H.; Zipf, A. Modelling the world in 3D from VGI/Crowdsourced data. Eur. Handb. Crowdsourced Geogr. Inf. 2016, 435–446. [Google Scholar]
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]















| Modelling Type | Model | Formal Result | Mean C2M [m] | Standard Deviation C2M [m] |
|---|---|---|---|---|
| Data-driven free-form | Tri-mesh |  | 0.066 | 0.612 |
| Quad-mesh |  | 0.058 | 0.664 | |
| Model-driven | Model 1 (Segmented footprint based on DSM) |  | 1.254 | 1.725 |
| Model 2 (Segmented footprint based on the point cloud) |  | 0.237 | 0.813 | |
| Model 3 (footprint automatically segmented according to nadir image) |  | 0.174 | 0.603 | |
| Model 4 (OSM footprint) |  | 0.240 | 1.200 | |
| Model 5 (OSM segmented footprint) |  | 0.266 | 1.040 | |
| Model 6 (footprint segmented interactively based on nadir image) |  | 0.127 | 0.767 | |
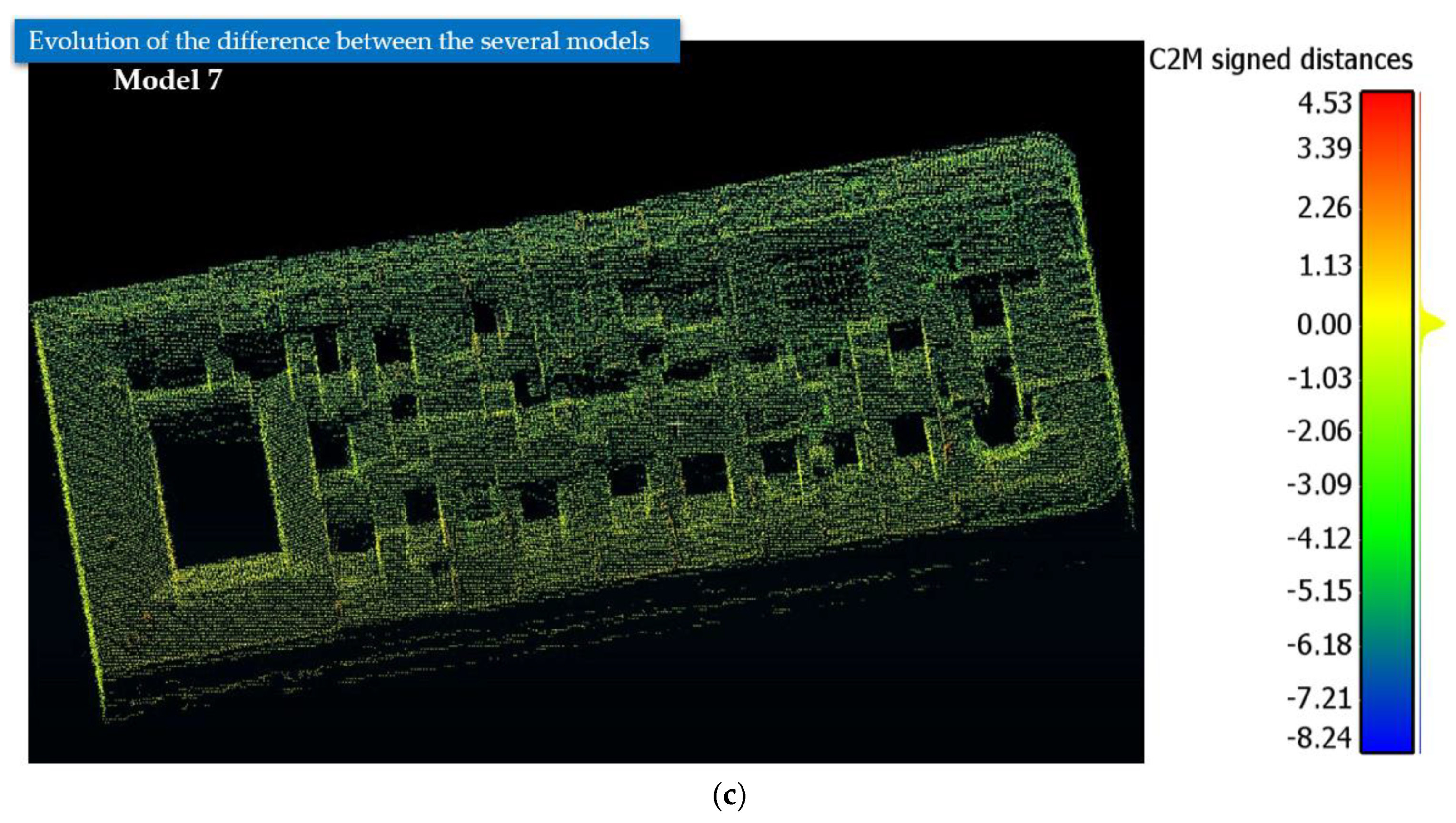
| Model 7 (interactive editing of the footprint and roof) |  | 0.008 | 0.567 |
| Model | Vertices [n.] | Faces [n.] | Dimension [kB] |
|---|---|---|---|
| Triangular mesh | 405,944 | 701,396 | 14,852 |
| Quadrangular mesh | 25,556 | 50,166 | 1012 |
| Simplification rate | 93.70 % | 92.85 % | 93.19 % |
| Method | Model | Mean C2M [m] |
|---|---|---|
| Free-form modelling by Song et al., 2020 | I | 0.2749 |
| II | 0.2777 | |
| III | 0.3312 | |
| IV | 0.3495 | |
| V | 0.1745 | |
| Free-form modelling proposed | Tri-mesh | 0.066 |
| Quad-mesh | 0.058 | |
| D.S.1 | 0.029 | |
| D.S.2 | 0.098 | |
| D.S.3 | 0.088 | |
| D.S.4 | 0.008 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costantino, D.; Vozza, G.; Alfio, V.S.; Pepe, M. Strategies for 3D Modelling of Buildings from Airborne Laser Scanner and Photogrammetric Data Based on Free-Form and Model-Driven Methods: The Case Study of the Old Town Centre of Bordeaux (France). Appl. Sci. 2021, 11, 10993. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210993
Costantino D, Vozza G, Alfio VS, Pepe M. Strategies for 3D Modelling of Buildings from Airborne Laser Scanner and Photogrammetric Data Based on Free-Form and Model-Driven Methods: The Case Study of the Old Town Centre of Bordeaux (France). Applied Sciences. 2021; 11(22):10993. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210993
Chicago/Turabian StyleCostantino, Domenica, Gabriele Vozza, Vincenzo Saverio Alfio, and Massimiliano Pepe. 2021. "Strategies for 3D Modelling of Buildings from Airborne Laser Scanner and Photogrammetric Data Based on Free-Form and Model-Driven Methods: The Case Study of the Old Town Centre of Bordeaux (France)" Applied Sciences 11, no. 22: 10993. https://0-doi-org.brum.beds.ac.uk/10.3390/app112210993