
Numerical Modeling of Nonlinear Response of Seafloor Porous Saturated Soil Deposits to SH-Wave Propagation





Abstract
:1. Introduction
2. Materials and Methods
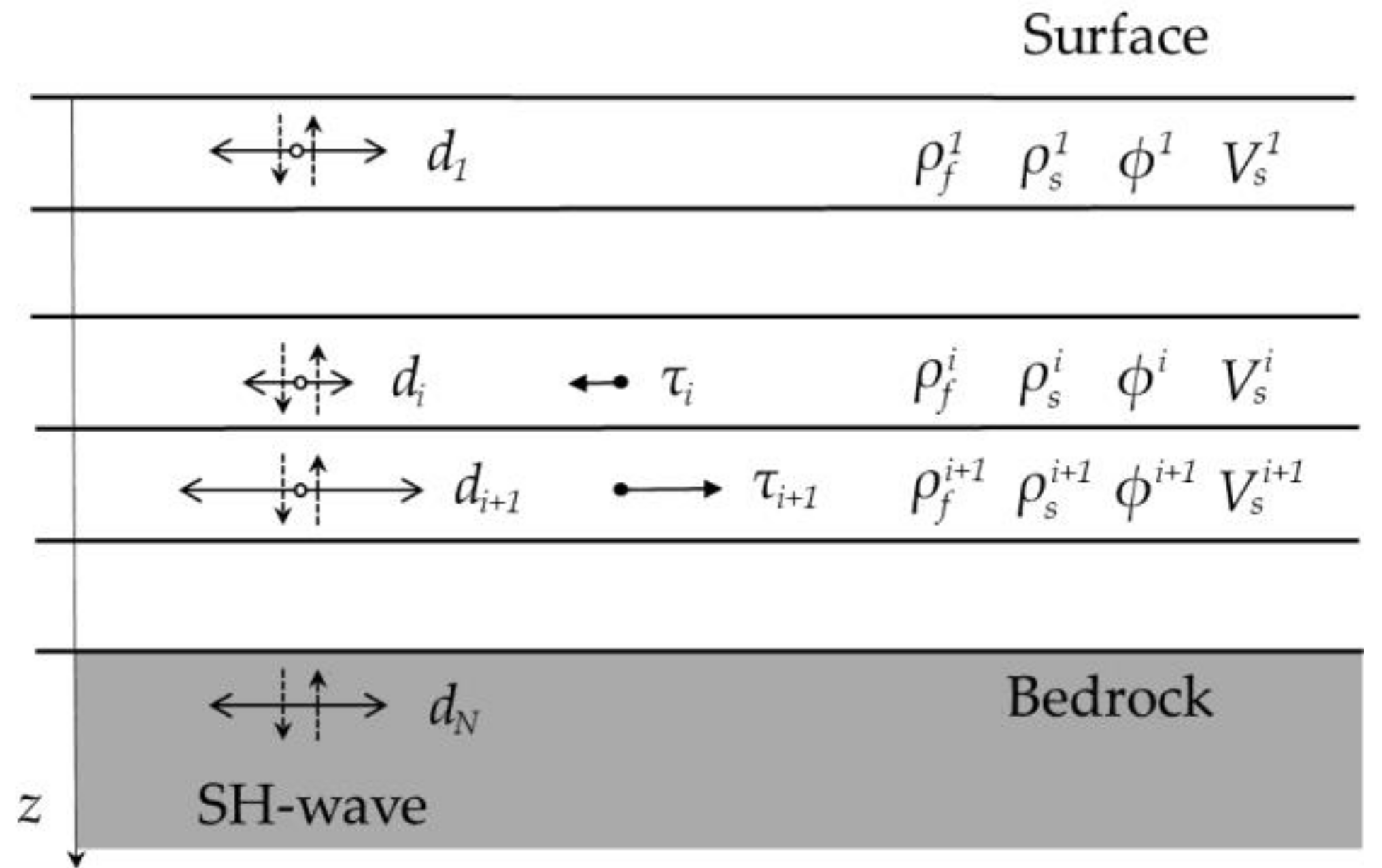
2.1. Improving the NERA Algorithm To Incorporate Biot and Gassman Models
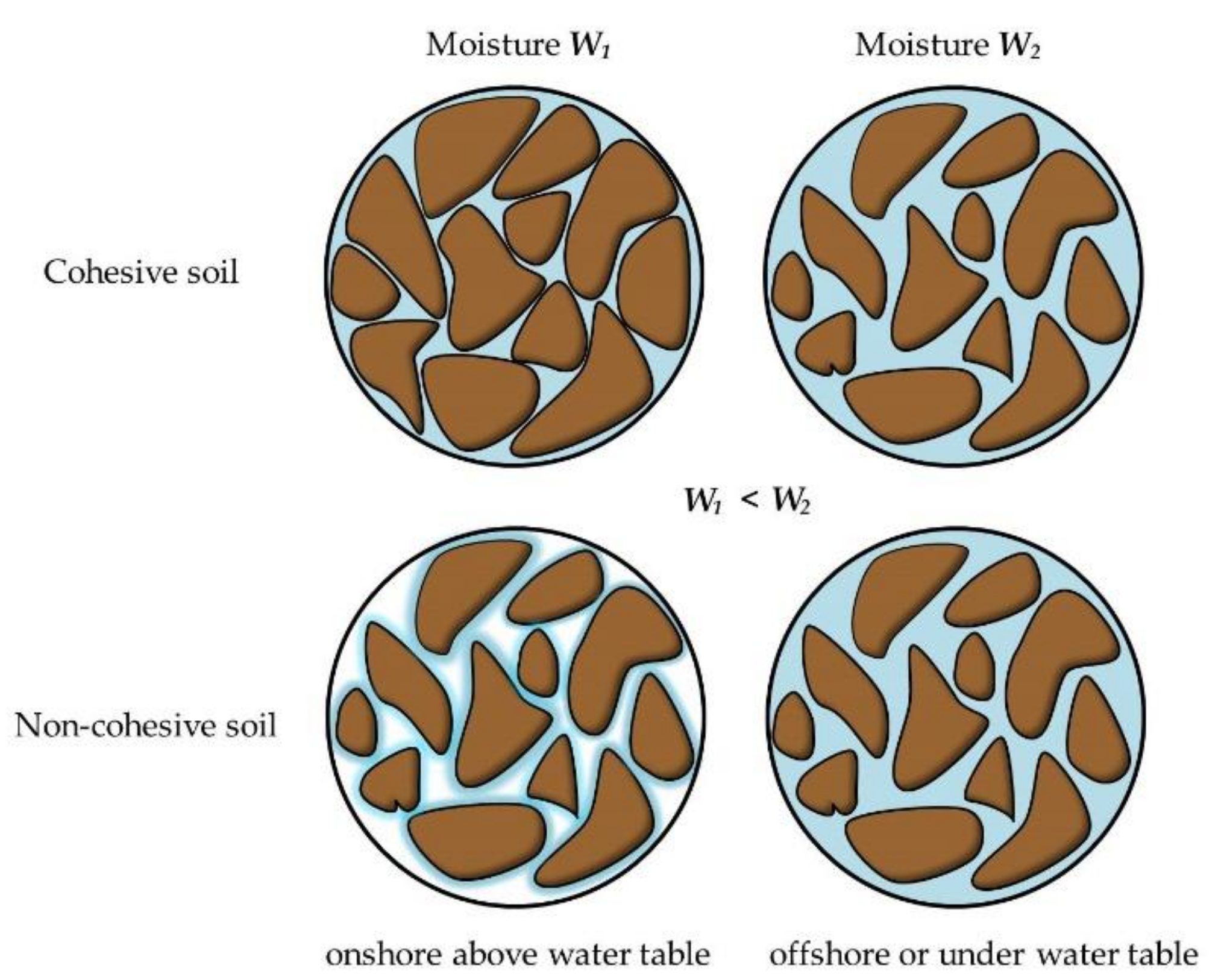
2.2. The Models of Elementary Volume of Cohesive/Non-Cohesive Soils
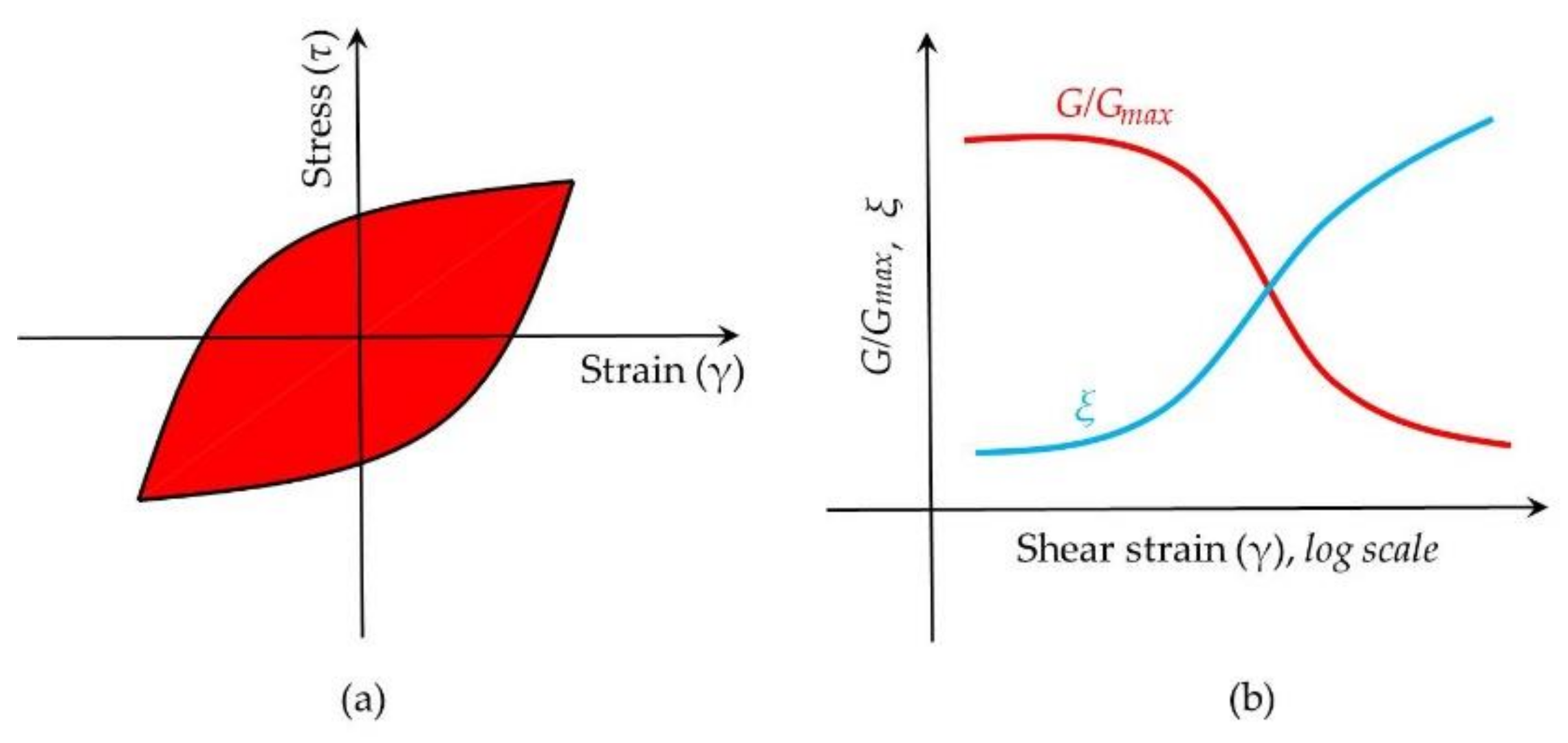
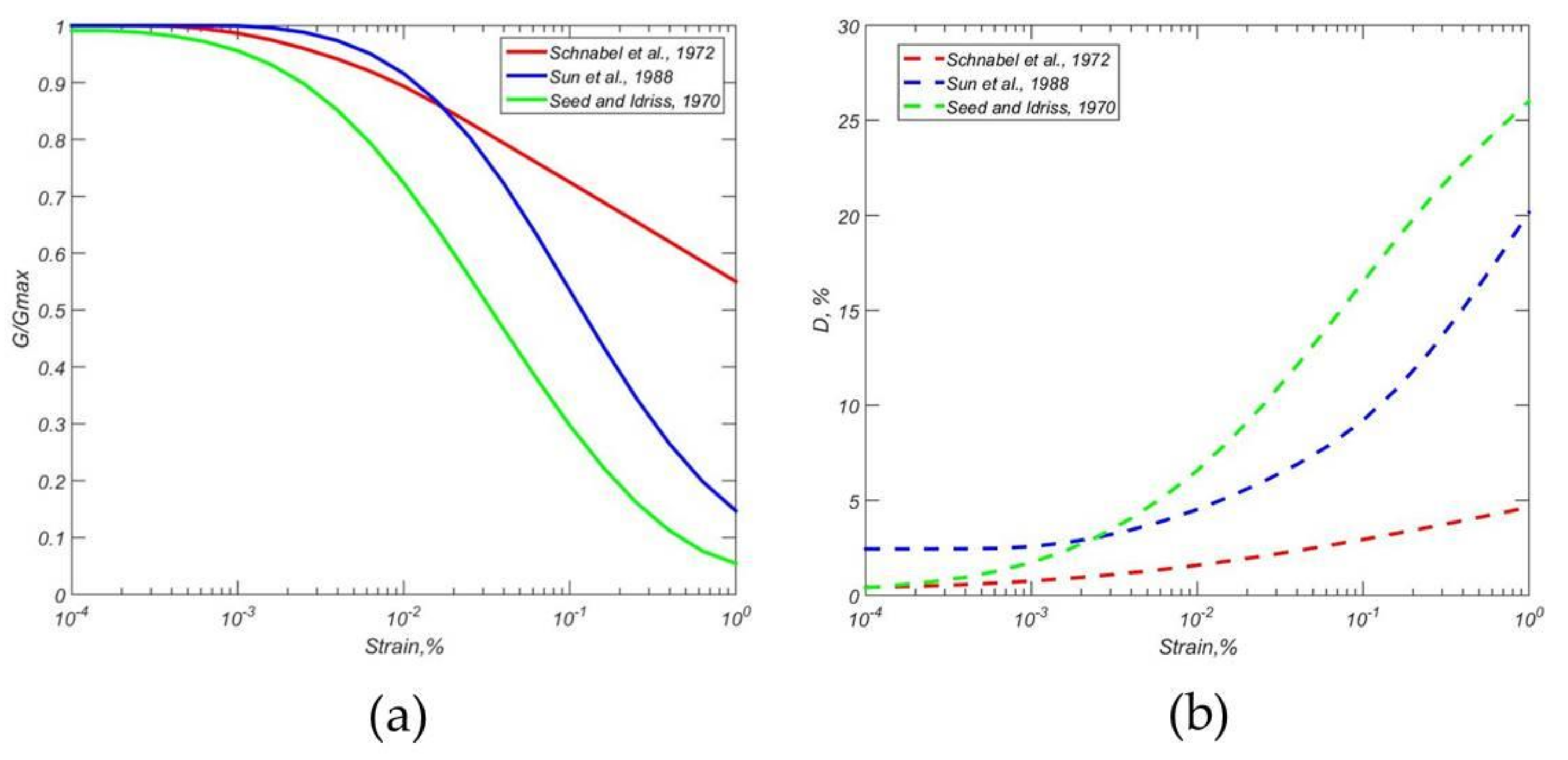
2.3. Maximum Shear Modulus Gmax and Shear Modulus Degradation Curves G/Gmax
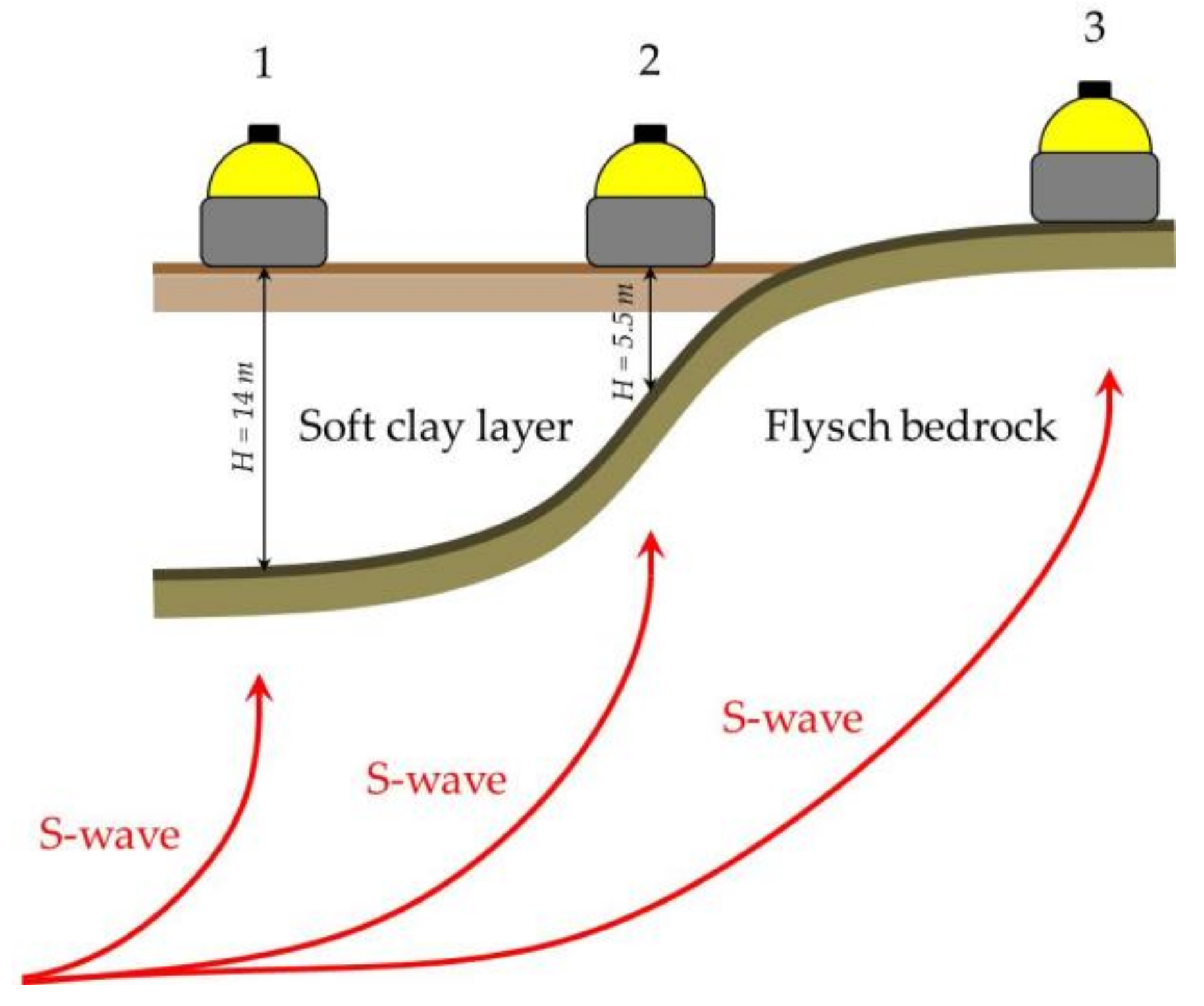
2.4. Modeling the Response of Soft Clay Layer at the Black Sea Offshore Site
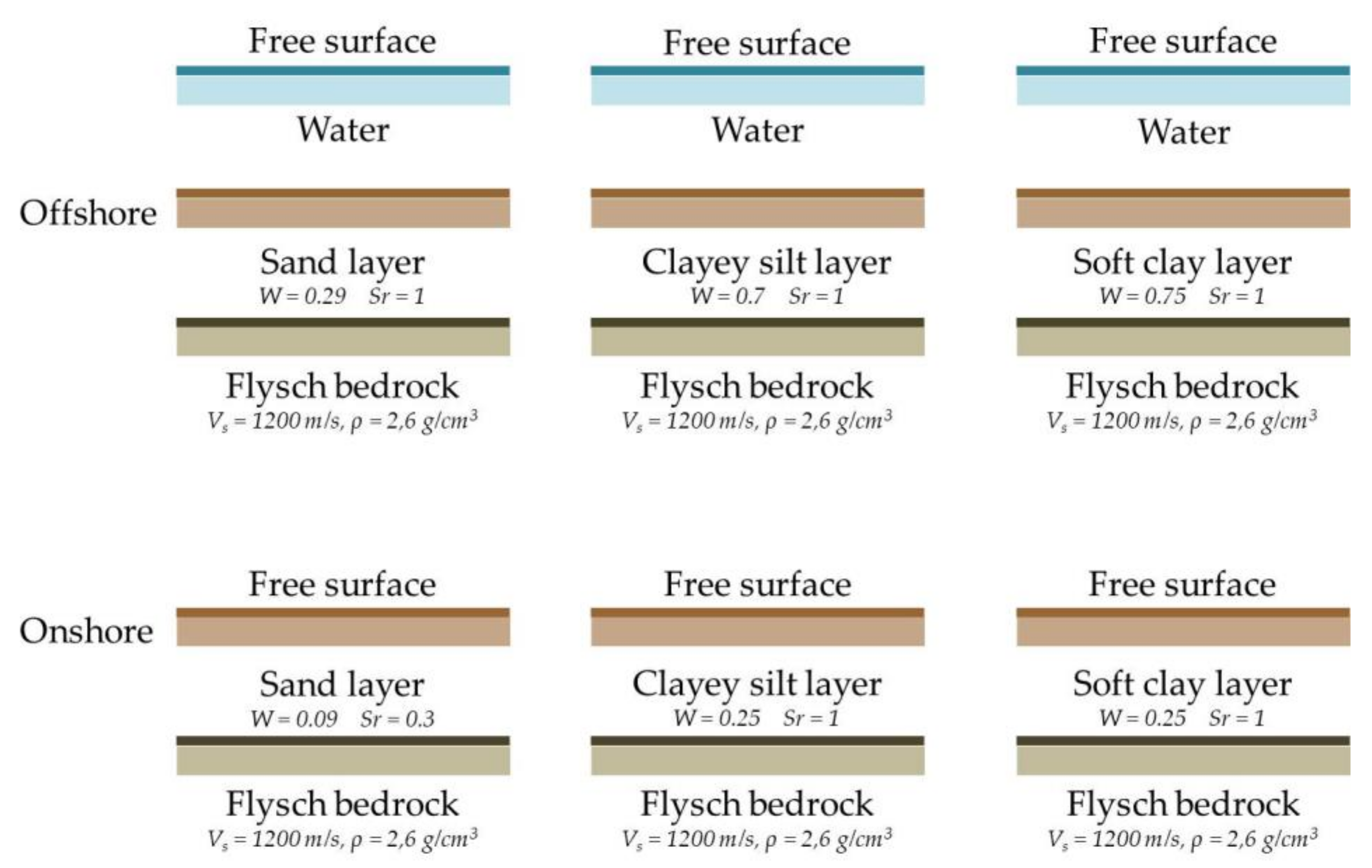
2.5. Modeling of the Response of Synthetic Soil Deposits With Porous Medium Parameters Specific for Low Moisture Onshore and High Moisture Offshore Sites
3. Modeling Results and Discussion
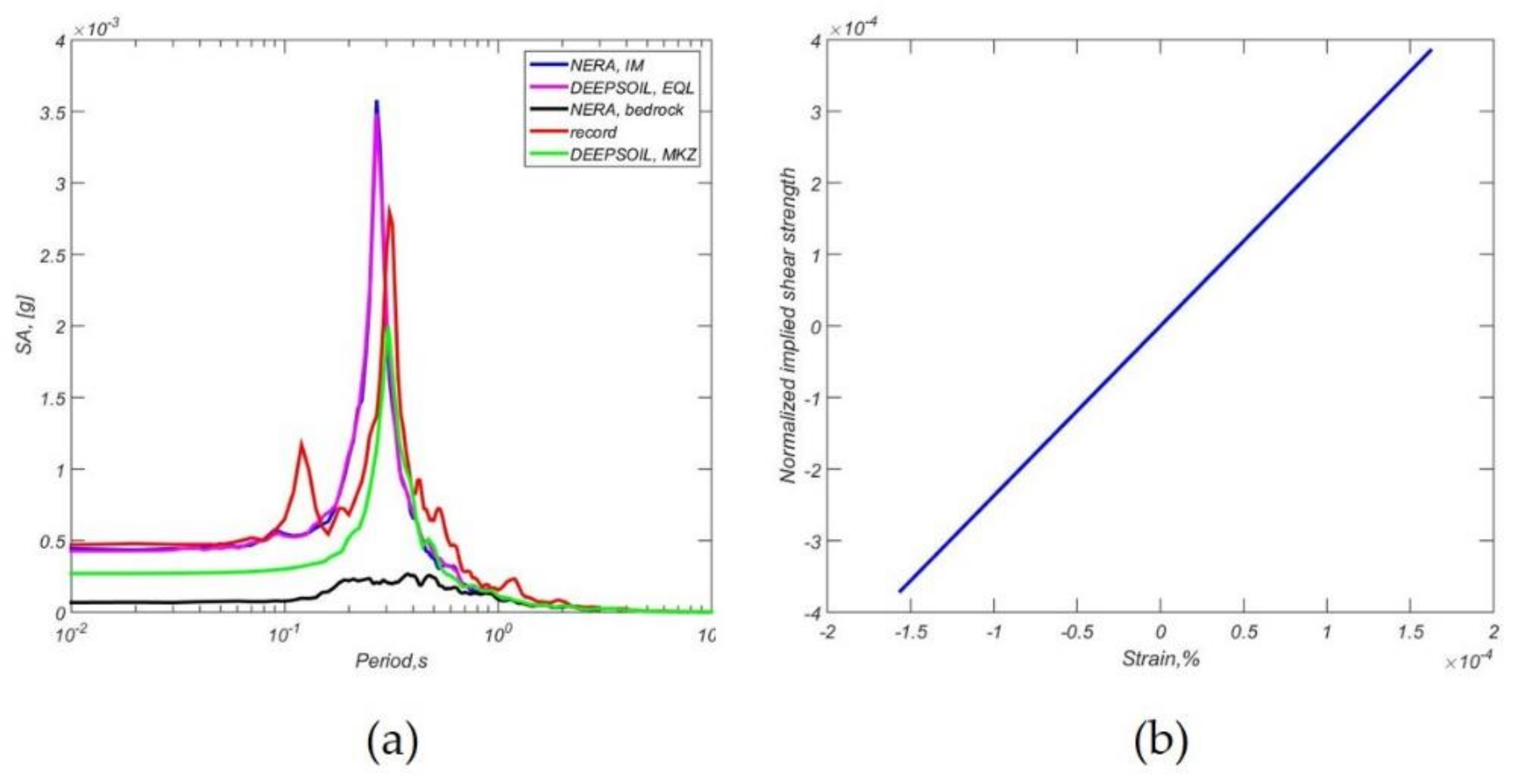
3.1. The Response of Soft Clay Layer at the Black Sea Offshore Site
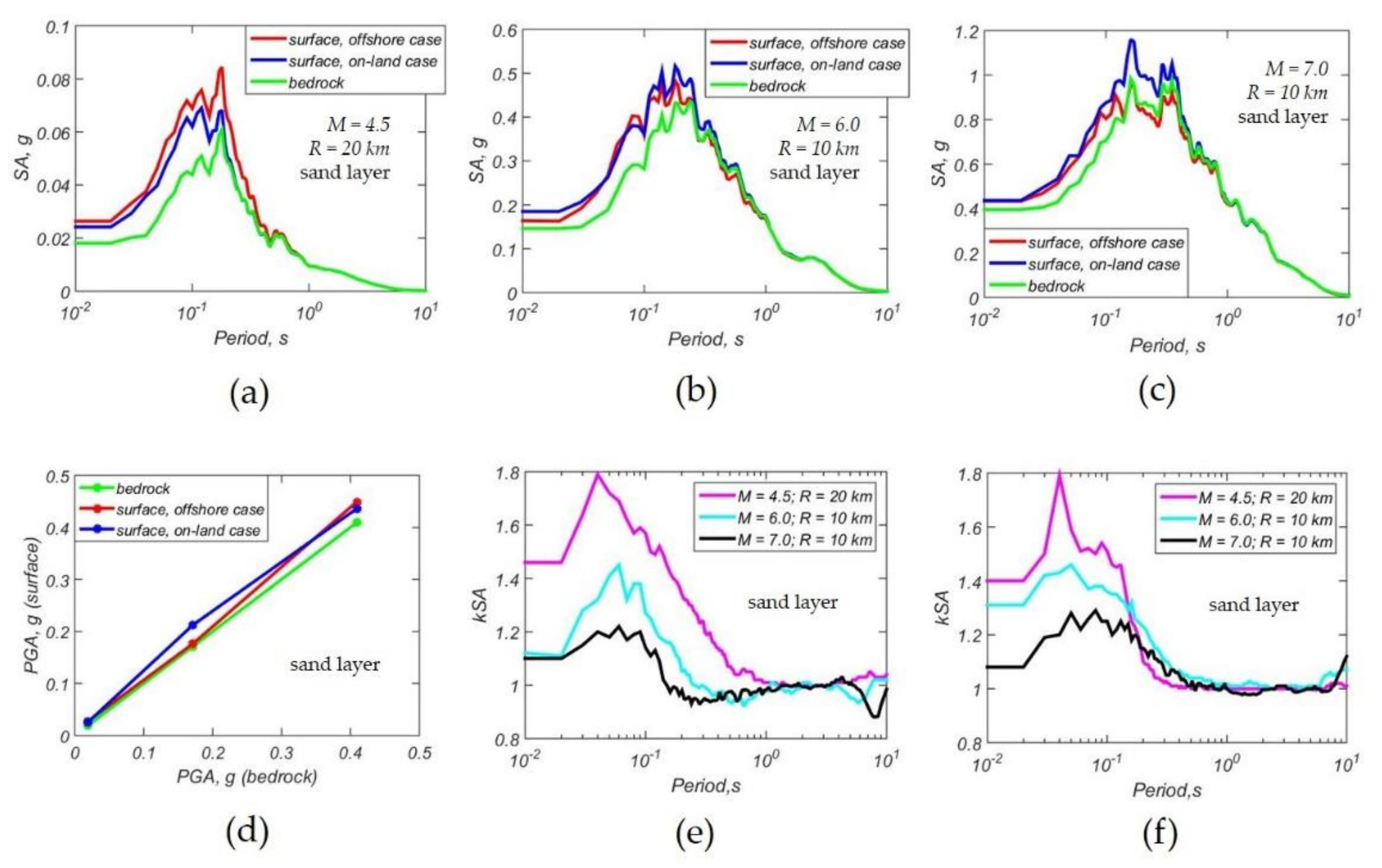
3.2. The Response of Synthetic Soil Deposits With Porous Medium Parameters Specific for Low Moisture Onshore and High Moisture Offshore Sites
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Kramer, S.L.; Paulsen, S.B. Practical Use of Geotechnical Site Response Models. In Proceedings of the International Workshop on Uncertainties in Nonlinear Soil Properties and Their Impact on Modeling Dynamic Soil Response, Berkeley, CA, USA, 18–19 March 2004; p. 10. [Google Scholar]
- Stewart, J.P.; Afshari, K.; Hashash, Y.M.A. Guidelines for Performing Hazard-Consistent One-Dimensional Ground Response Analysis for Ground Motion Prediction; Pacific Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 2014; 139p. [Google Scholar]
- Schnabel, P.B.; Lysmer, J.; Seed, H.B. SHAKE: A Computer Program for Earthquake Response Analysis of Horizontally Layered Sites; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1972; 102p. [Google Scholar]
- Bardet, J.P.; Ichii, K.; Lin, C.H. EERA: A Computer Program for Equivalent Linear Earthquake Site Response Analysis of Layered Soils Deposits; University of Southern California: Los Angeles, CA, USA, 2000; 38p. [Google Scholar]
- Kottke, A.R.; Rathje, E.M. Technical Manual for Strata; PEER Report 2008/10; Pacifc Earthquake Engineering Research Center: Berkeley, CA, USA, 2008; 100p. [Google Scholar]
- Bardet, J.P.; Tobita, T. NERA: A Computer Program for Nonlinear Earthquake Site Response Analyses of Layered Soil Deposits; University of Southern California: Los Angeles, CA, USA, 2001; 44p. [Google Scholar]
- Iwan, W.D. On a class of models for the yielding behavior of continuous and composite systems. J. Appl. Mech. 1967, 34, 612–617. [Google Scholar] [CrossRef]
- Mróz, Z. On the description of anisotropic workhardening. J. Mech. Phys. Solids 1967, 15, 163–175. [Google Scholar] [CrossRef]
- Hashash, Y.M.A.; Musgrove, M.I.; Harmon, J.A.; Ilhan, O.; Xing, G.; Numanoglu, O.; Groholski, D.R.; Phillips, C.A.; Park, D. DEEPSOIL 7, User Manual; Board of Trustees of University of Illinois at Urbana-Champaign: Urbana, IL, USA, 2020; 170p. [Google Scholar]
- Matasovic, N. Seismic Response of Composite Horizontally-Layered Soil Deposits. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 1993. [Google Scholar]
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 1996; 653p. [Google Scholar]
- Hao, H. Effects of Spatial Variation of Ground Motions on Large Multiply Supported Structures; UCB/EERC-89-06; University of California: Berkeley, CA, USA, 1989; 168p. [Google Scholar]
- Li, C.; Hao, H.; Li, H.; Bi, K.; Chen, B. Modeling and Simulation of Spatially Correlated Ground Motions at Multiple Onshore and Offshore sites. J. Earthq. Eng. 2017, 21. [Google Scholar] [CrossRef]
- Prevost, J.H. DYNAFLOW™ Version 02 Release 10.A. 2010. 516p. Available online: https://blogs.princeton.edu/prevost/wp-content/uploads/sites/192/2013/11/dynaflow-v02.10.A-full-manual-2010.pdf (accessed on 22 December 2020).
- PLAXIS 3D Reference Manual. 2016. Available online: https://communities.bentley.com/products/geotech-analysis/w/plaxis-soilvision-wiki/46137/manuals---plaxis (accessed on 22 December 2020).
- ITASCA Consulting Group, Inc. FLAC3D—Fast Lagrangian Analysis of Continua in Three-Dimensions, Ver. 6.0. 2017. Available online: https://www.itascacg.com/software/downloads/flac3d-downloads (accessed on 22 December 2020).
- Ye, J. Seismic response of poro-elastic seabed and composite breakwater under strong earthquake loading. Bull. Earthq. Eng. 2012, 10, 1609–1633. [Google Scholar] [CrossRef]
- Diao, H.; Hu, J.; Xie, L. Effect of seawater on incident plane P and SV waves at ocean bottom and engineering characteristics of offshore ground motion records off the coast of southern California, USA. Earthq. Eng. Eng. Vib. 2014, 13, 181–194. [Google Scholar] [CrossRef]
- Towhata, I. Geotechnical Earthquake Engineering; Springer: Berlin/Heidelberg, Germany, 2008; p. 684. [Google Scholar] [CrossRef]
- Stewart, J.P.; Boore, D.M.; Seyhan, E.; Atkinson, G.M. NGA-West2 equations for predicting vertical-component PGA, PGV, and 5%-damped PSA from shallow crustal earthquakes. Earthq. Spectra 2016, 32, 1005–1031. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Liu, H.-W. Site response analysis of vertical ground motion in consideration of soil nonlinearity. Soil Dyn. Earthq. Eng. 2017, 102, 124–136. [Google Scholar] [CrossRef]
- Beresnev, I.A.; Nightingale, A.M.; Silva, W.J. Properties of Vertical Ground Motions. Bull. Seismol. Soc. Am. 2002, 92, 3152–3164. [Google Scholar] [CrossRef]
- Boore, D.M.; Smith, C.E. Analysis of earthquake recordings obtained from the seafloor earthquake measurement system (SEMS) instruments deployed off the coast of Southern California. Bull. Seismol. Soc. Am. 1999, 89, 260–274. [Google Scholar]
- Medvedev, S.V. Engineering Seismology; Gosstrojizdat: Moscow, Russia, 1962; 284p. (In Russian) [Google Scholar]
- Goto, H.; Tanaka, N.; Sawada, S.; Inatani, H. S-wave impedance measurements of the uppermost material in surface ground layers: Vertical load excitation on a circular disk. Soils Found. 2015, 55, 1282–1292. [Google Scholar] [CrossRef] [Green Version]
- Biot, M.A. Theory of Propagation of Elastic Waves in a Fluid-saturated Porous Solid I. Low-frequency range. J. Acoust. Soc. Am. 1956, 28, 168–178. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of Propagation of Elastic Waves in a Fluid-saturated Porous Solid II. Higher frequency range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Gassmann, F. Über die Elastizität Poröser Medien; Instut für Geophysik an der ETH: Zurich, Switzerland, 1951. [Google Scholar]
- Frenkel, J. On the Theory of Seismic and Seismoelectric Phenomena in a Moist Soil. J. Phys. 1944, 111, 230–241, republished in J. Eng. Mech. 2005, 131, 879–887. [Google Scholar] [CrossRef] [Green Version]
- Wenzlau, F. Poroelastic Modelling of Wavefields in Heterogeneous Media. Ph.D. Thesis, University of Karlsruhe, Kahrsruhe, Germany, 2009; 159p. [Google Scholar]
- White, J.E. Underground Sound: Application of Seismic Waves. In Seismic Wave Propagation: Collected Works of J. E. White; Society of Exploration Geophysicists: Tulsa, OK, USA, 1983. [Google Scholar]
- Avseth, P.; Mukerji, T.; Mavko, G. Quantitative Seismic Interpretation: Applying Rock Physics Tools to Reduce Interpretation Risk; Cambridge University Press: Cambridge, UK, 2005; 359p. [Google Scholar] [CrossRef]
- Mavko, G.; Mukerji, T.; Dvorkin, J. The Rock Physics Handbook: Tools for Seismic Analysis of Porous Media; Cambridge University Press: New York, NY, USA, 2009; 511p. [Google Scholar] [CrossRef]
- Masing, G. Eigenspannungen und Verfertigung beim Messing. In Proceedings of the 2nd International Congress on Applied Mechanics, Zurich, Switzerland, 1926; pp. 332–335. [Google Scholar]
- Easton, Z.M.; Bock, E. Soil and Soil Water Relationships; Produced by Communications and Marketing, College of Agriculture and Life Sciences, Virginia Tech. 2016. 9p. Available online: https://digitalpubs.ext.vt.edu/vcedigitalpubs/2481933593189246/MobilePagedReplica.action?pm=2&folio=1#pg1 (accessed on 22 December 2020).
- Fityus, S.; Buzzi, O. The place of expansive clays in the framework of unsaturated soil mechanics. Appl. Clay Sci. 2009, 43, 150–155. [Google Scholar] [CrossRef]
- Azam, S.; Ito, M.; Chowdhury, R. Engineering Properties of an Expansive Soil. In Proceedings of the 18th International Conference on Soil Mechanics and Geotechnical Engineering, Paris, France, 2–6 September 2013; pp. 199–202. [Google Scholar]
- Kagawa, T. Moduli and damping factors of soft marine clays. J. Geotech. Eng. 1992, 118, 1360–1375. [Google Scholar] [CrossRef]
- Massarsch, K.R. Lateral Earth Pressure in Normally Consolidated Clay. In Proceedings of the 7th European Conference on Soil Mechanics and Foundation Engineering, Brighton, UK, 10–13 September 1979; Volume 2, pp. 245–249. [Google Scholar]
- Yasuda, S.; Yamaguchi, I. Dynamic Soil Properties of Undisturbed Samples. In Proceedings of the 20th Annual Conference of JSSMFE, Nagoya, Japan, 1985; pp. 539–542. [Google Scholar]
- Ishibashi, I.; Zhang, X. Unified dynamic shear moduli and damping ratios of sand and clay. Soil Found. 1993, 33, 182–191. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.I.; Golesorkhi, R.; Seed, H.B. Dynamic Moduli and Damping Ratios for Cohesive Soils; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1988; 42p. [Google Scholar]
- International Seismological Centre. Available online: http://www.isc.ac.uk/iscbulletin/ (accessed on 22 December 2020).
- Sabetta, F.; Pugliese, A. Estimation of Response Spectra and Simulation of Nonstationary Earthquake Ground Motions. Bull. Seismol. Soc. Am. 1996, 86, 337–352. [Google Scholar]
- Schnabel, P.B. Effects of local geology and distance from source on earthquake ground motions. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1973. [Google Scholar]
- Seed, H.B.; Idriss, I.M. Soil Moduli and Damping Factors for Dynamic Response Analysis; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1970; 48p. [Google Scholar]
- Kanai, K. Relation between the nature of surface layer and the amplitudes of earthquake motions. Bull. Earth. Res. Inst. 1952, 30, 31–37. [Google Scholar]
- Krylov, A.A.; Ivashchenko, A.I.; Kovachev, S.A. Assessing influence of local ground conditions on the seismic load intensity in the shelf area—The seismic impedance method and nonlinear earthquake response analysis. Eng. Res. 2016, 3, 46–52. (In Russian) [Google Scholar]
- Kendzera, A.V.; Semenova, Y.V. The influence of resonant and nonlinear features of soils on seismic hazard of construction sites. Geophys. J. 2016, 38, 3–18. (In Russian) [Google Scholar]
- Irikura, K.; Kudo, K.; Okada, S.; Sasatani, T. (Eds.) The Effects of Surface Geology on Seismic Motion; Balkema: Rotterdam, The Netherlands, 1998; 806p. [Google Scholar]
- Gusev, A.A. About seismological basement of earthquake-resistant construction. Phys. Solid Earth 2002, 12, 56–70. (In Russian) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Moisture Coefficient, W | Plasticity Index, PI | Density of Solid Grains, ρS (g/cm3) | Density of Solid Matrix, ρm (g/cm3) | Mean Density, ρ (g/cm3) | Void Ratio, e | Saturation Factor, Sr | S-wave Velocity, Vs (m/s) |
|---|---|---|---|---|---|---|---|
| 0.75 | 21.4 | 2.71 | 0.88 | 1.54 | 2.08 | 1 | 80 |
| Moisture Coefficient, W | Density of Solid Grains, ρS (g/cm3) | Density of Solid Matrix, ρm (g/cm3) | Density of Pore Water, ρf (g/cm3) | Mean Density, ρ (g/cm3) | Void Ratio, e | Saturation Factor, Sr | S-Wave Velocity, Vs (m/s) |
|---|---|---|---|---|---|---|---|
| 0.29 offshore 0.09 onshore | 2.75 | 1.52 | 1 | 1.96 offshore 1.66 onshore | 0.81 | 1 offshore 0.3 onshore | 280 offshore 305 onshore |
| Moisture coefficient, W | Density of Solid Grains, ρS (g/cm3) | Density of Solid Matrix, ρm (g/cm3) | Density of Pore Water, ρf (g/cm3) | Mean Density, ρ (g/cm3) | Void Ratio, e | Saturation Factor, Sr | S-wave Velocity, Vs (m/s) |
|---|---|---|---|---|---|---|---|
| 0.70 offshore 0.25 onshore | 2.68 | 1.01 | 1 | 1.59 offshore 2.01 onshore | 1.85 offshore 0.67 onshore | 1 offshore 1 onshore | 150 offshore 186 onshore |
| Moisture Coefficient, W | Density of Solid Grains, ρS (g/cm3) | Density of Solid Matrix, ρm (g/cm3) | Density of Pore Water, ρf (g/cm3) | Mean Density, ρ (g/cm3) | Void Ratio, e | Saturation Factor, Sr | S-wave Velocity, Vs (m/s) |
|---|---|---|---|---|---|---|---|
| 0.75 offshore 0.25 onshore | 2.71 | 0.88 | 1 | 1.54 offshore 2.02 onshore | 2.08 offshore 0.68 onshore | 1 offshore 1 onshore | 80 offshore 102 onshore |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krylov, A.A.; Alekseev, D.A.; Kovachev, S.A.; Radiuk, E.A.; Novikov, M.A. Numerical Modeling of Nonlinear Response of Seafloor Porous Saturated Soil Deposits to SH-Wave Propagation. Appl. Sci. 2021, 11, 1854. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041854
Krylov AA, Alekseev DA, Kovachev SA, Radiuk EA, Novikov MA. Numerical Modeling of Nonlinear Response of Seafloor Porous Saturated Soil Deposits to SH-Wave Propagation. Applied Sciences. 2021; 11(4):1854. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041854
Chicago/Turabian StyleKrylov, Artem A., Dmitry A. Alekseev, Sergey A. Kovachev, Elena A. Radiuk, and Mikhail A. Novikov. 2021. "Numerical Modeling of Nonlinear Response of Seafloor Porous Saturated Soil Deposits to SH-Wave Propagation" Applied Sciences 11, no. 4: 1854. https://0-doi-org.brum.beds.ac.uk/10.3390/app11041854