
Seismic Fragility and Risk Assessment of a Nuclear Power Plant Containment Building for Seismic Input Based on the Conditional Spectrum

Abstract
:1. Introduction
2. Numerical Model of Containment Building
2.1. Linear Elastic Properties
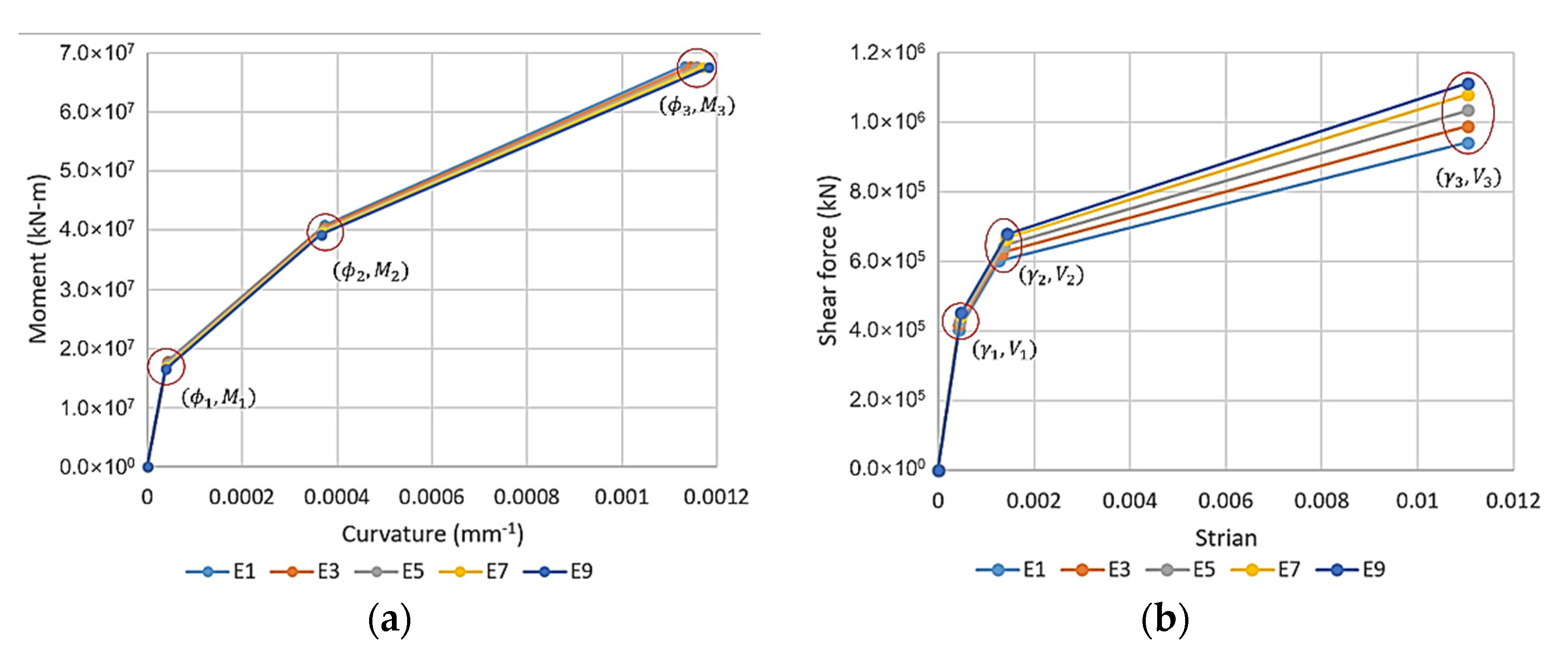
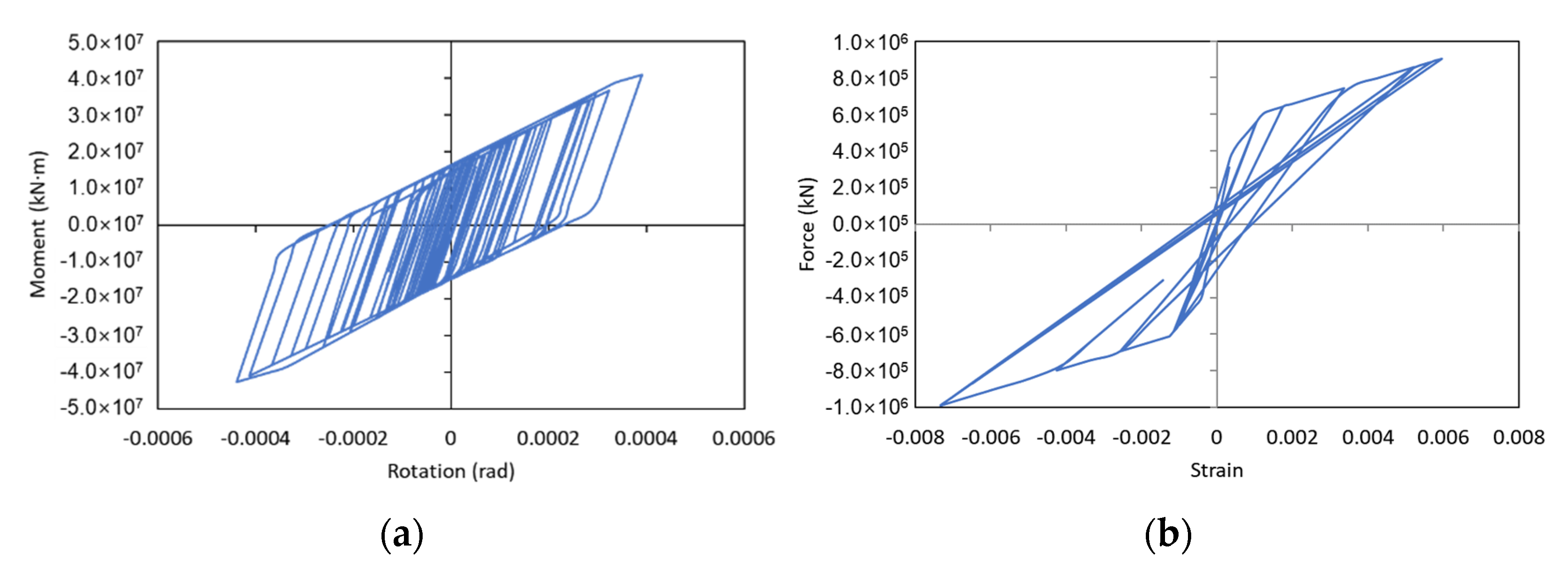
2.2. Nonlinear Modeling
2.3. Limit State
3. Ground Motion
3.1. UHRS
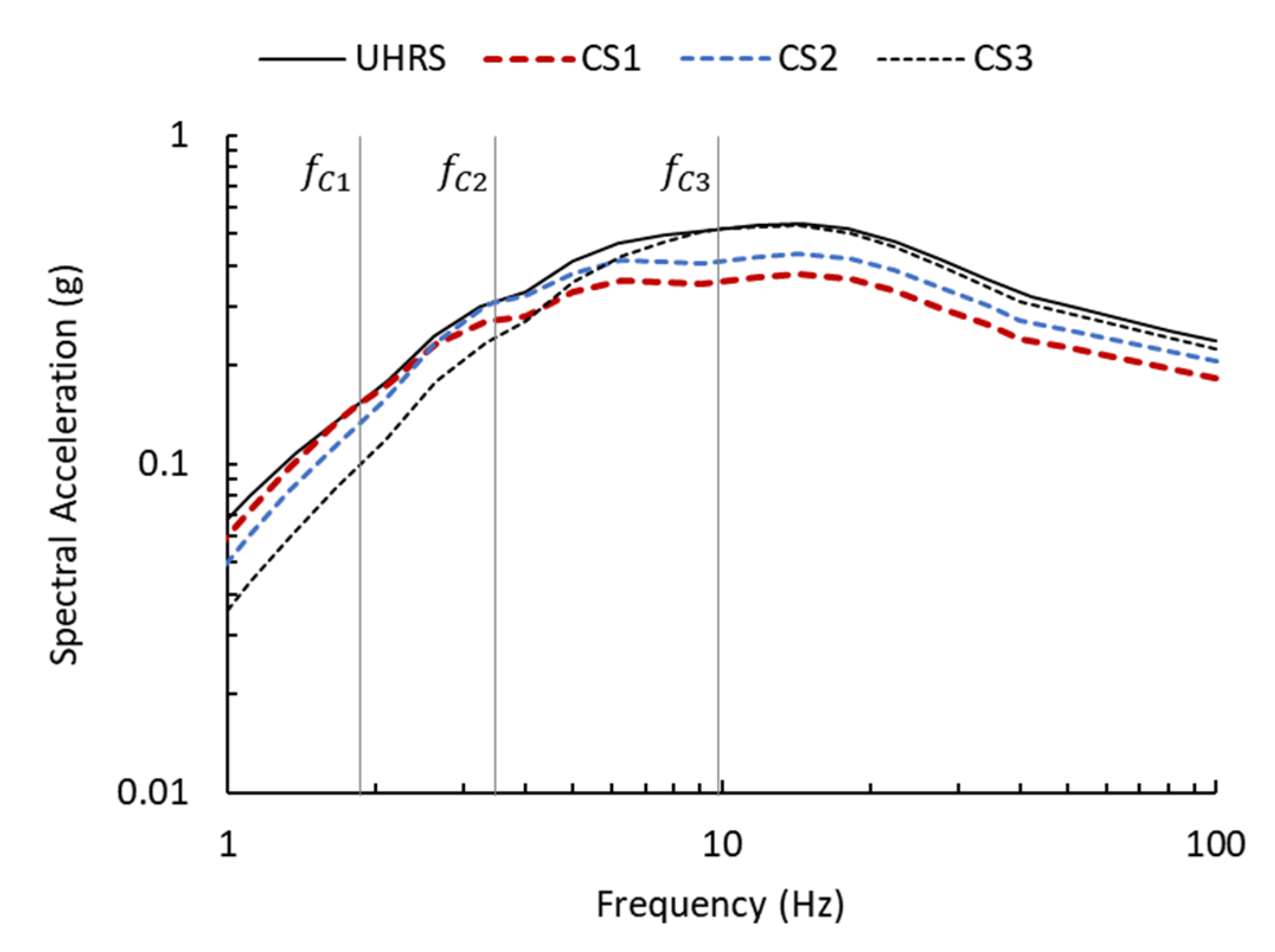
3.2. Conditional Spectrum
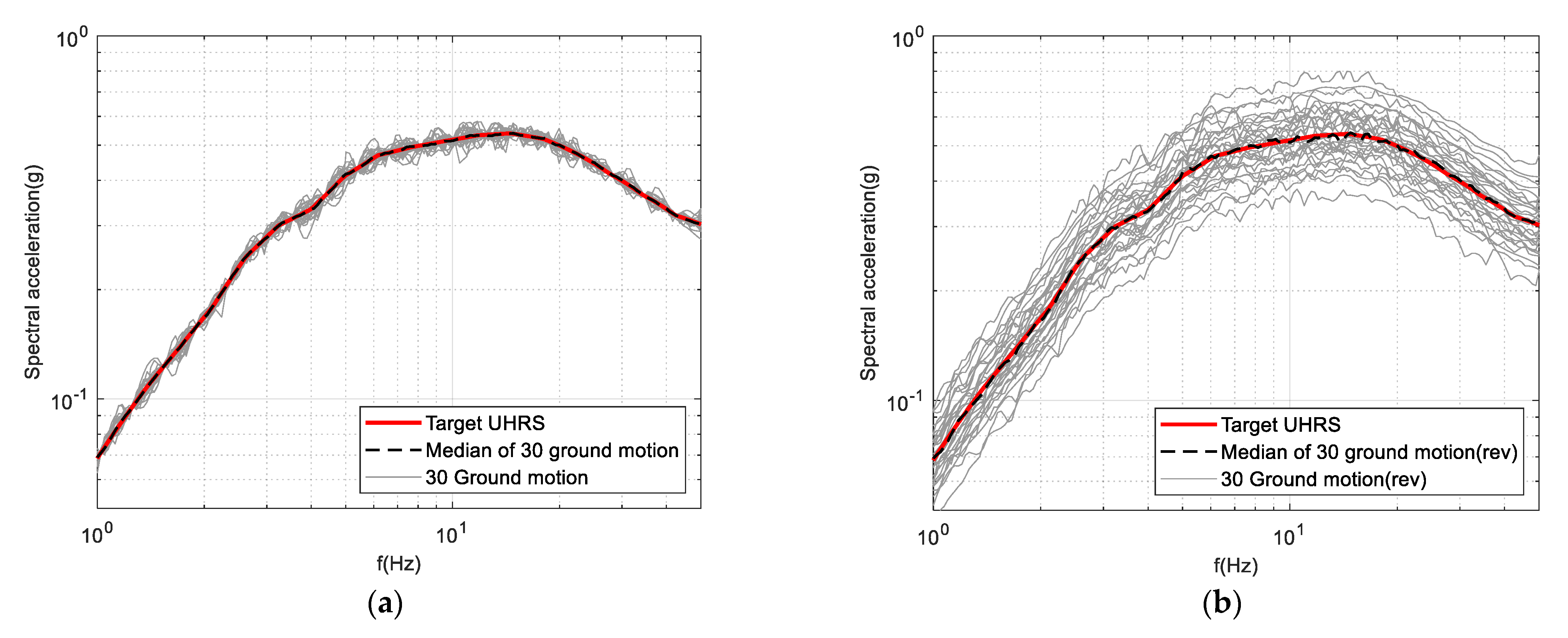
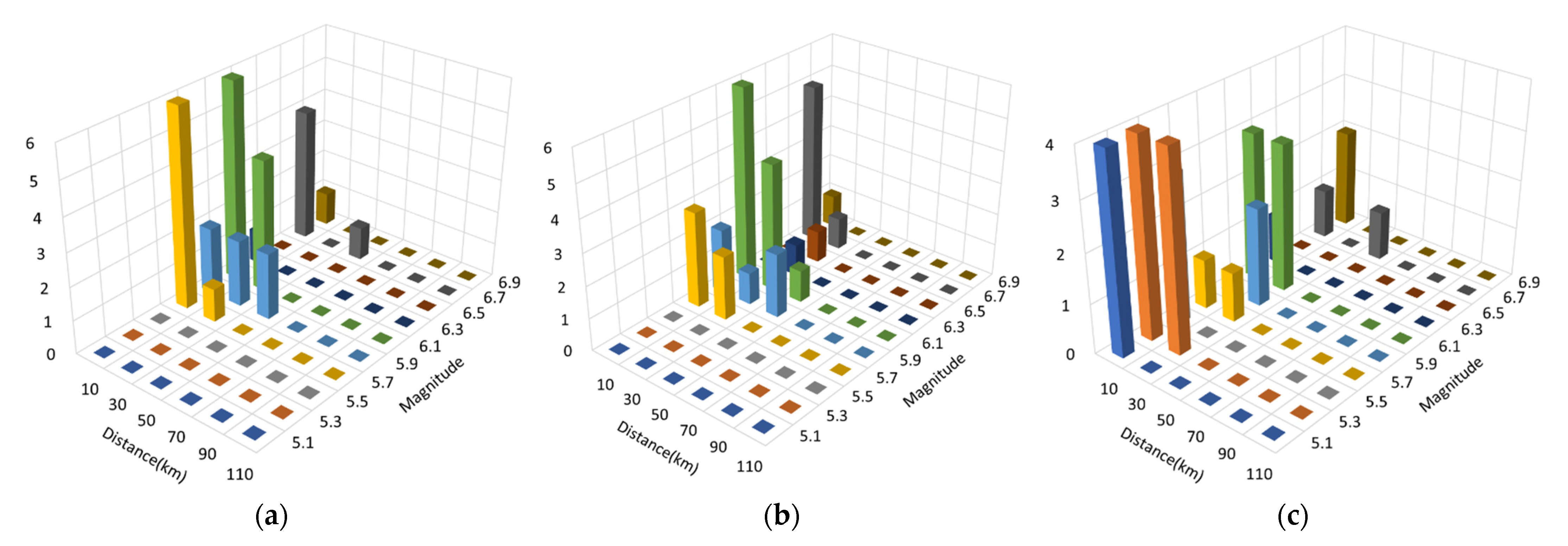
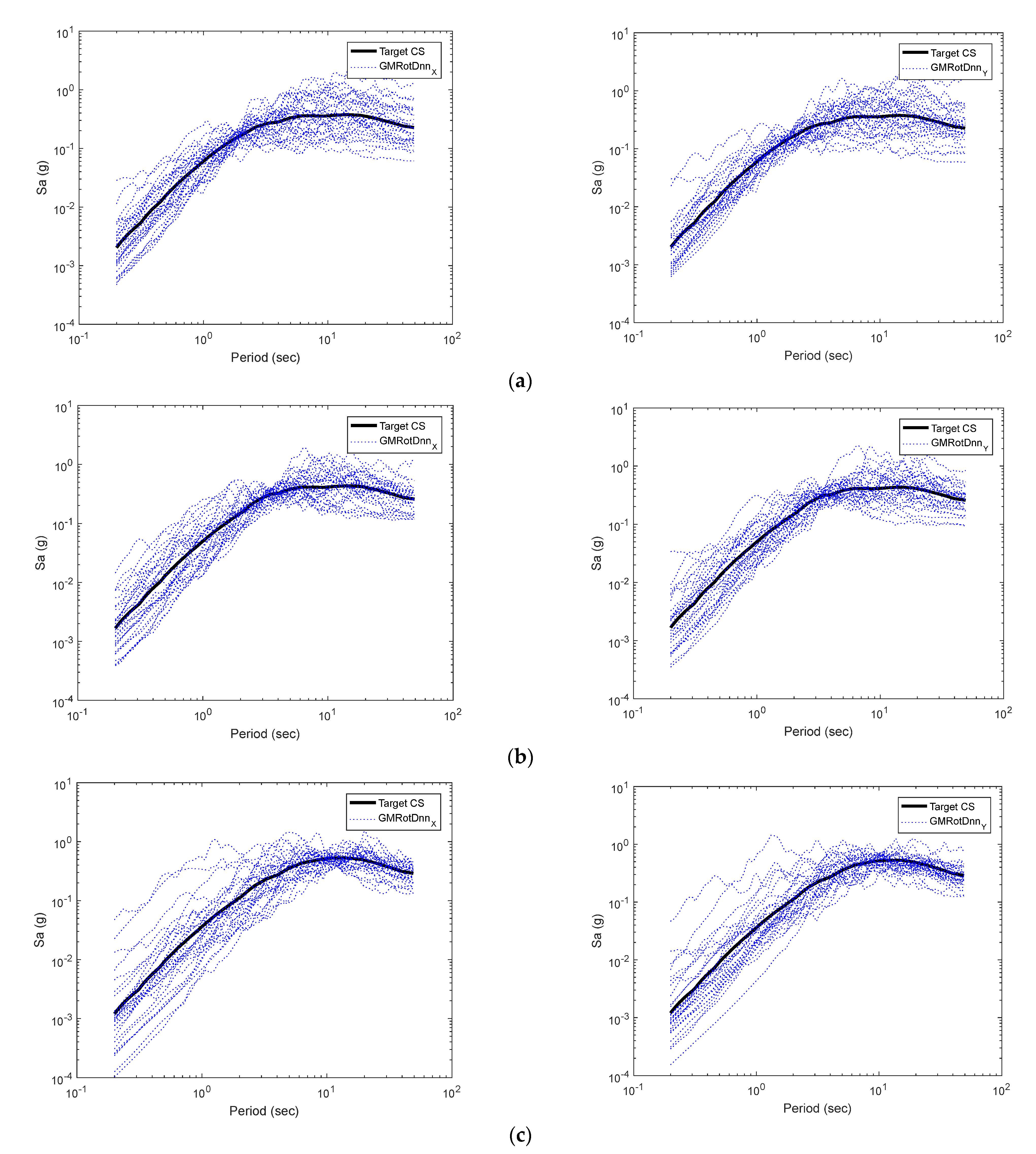
3.3. Ground Motion Time History
4. Seismic Fragility Assessment Procedure
4.1. Modeling of Randomness
4.2. Modeling of Uncertainty
4.3. Incremental Dynamic Analysis
5. Probabilistic Seismic Risk Assessment Result
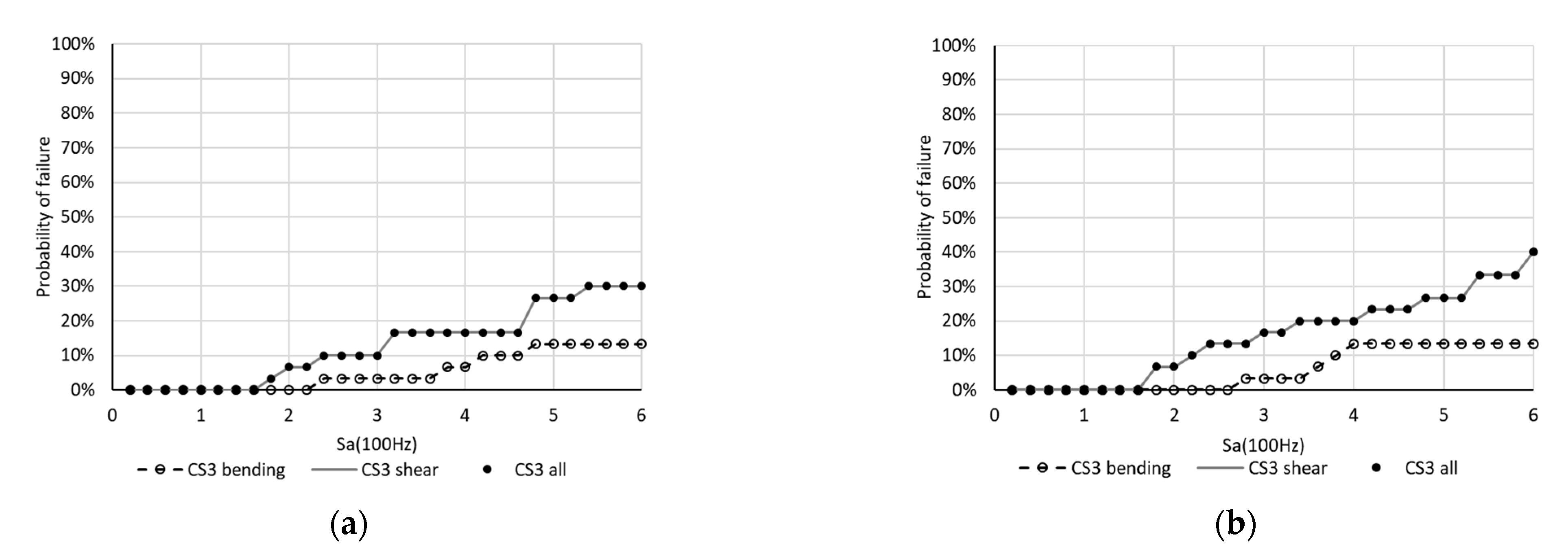
5.1. Contribution of Limit States
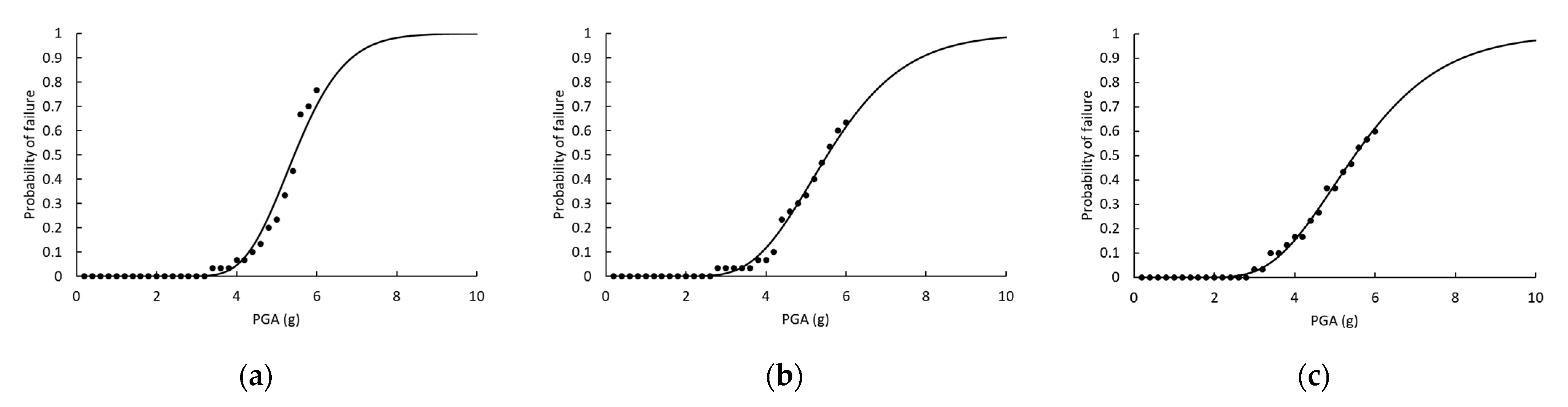
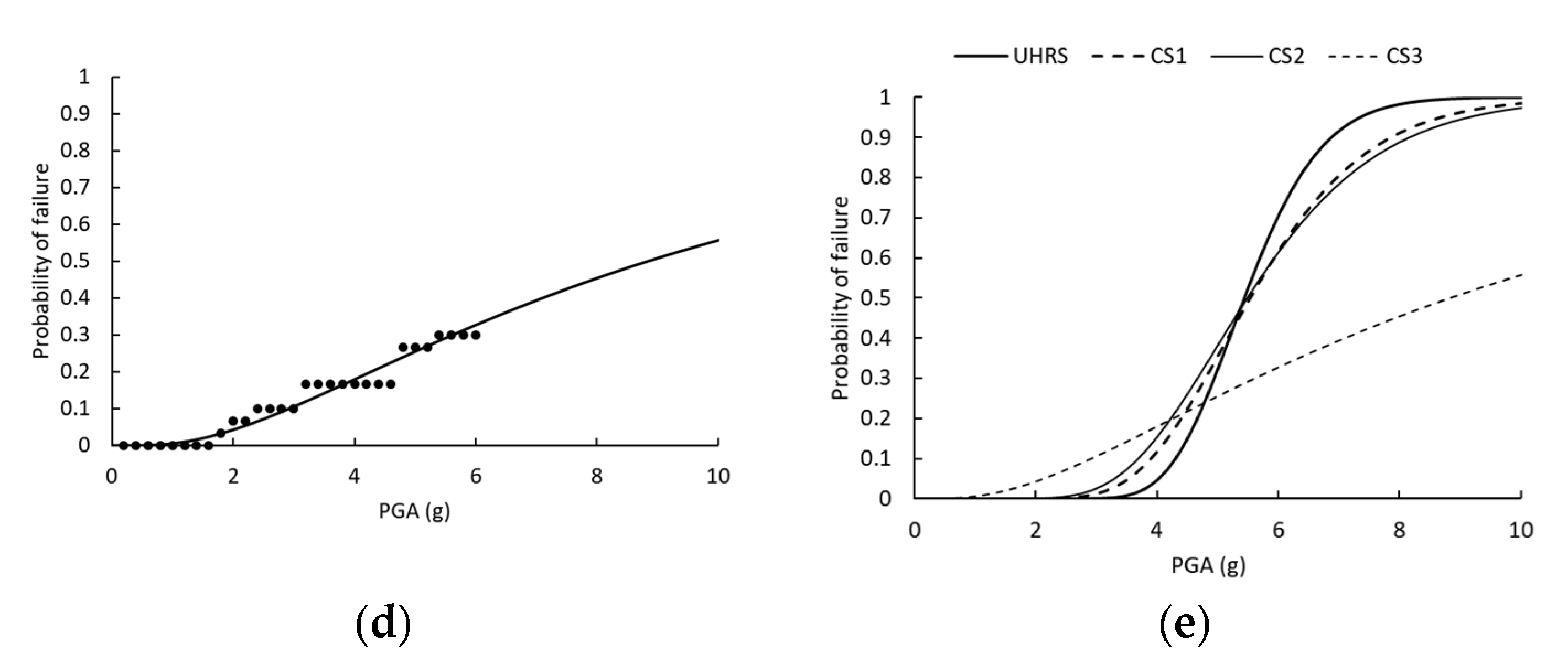
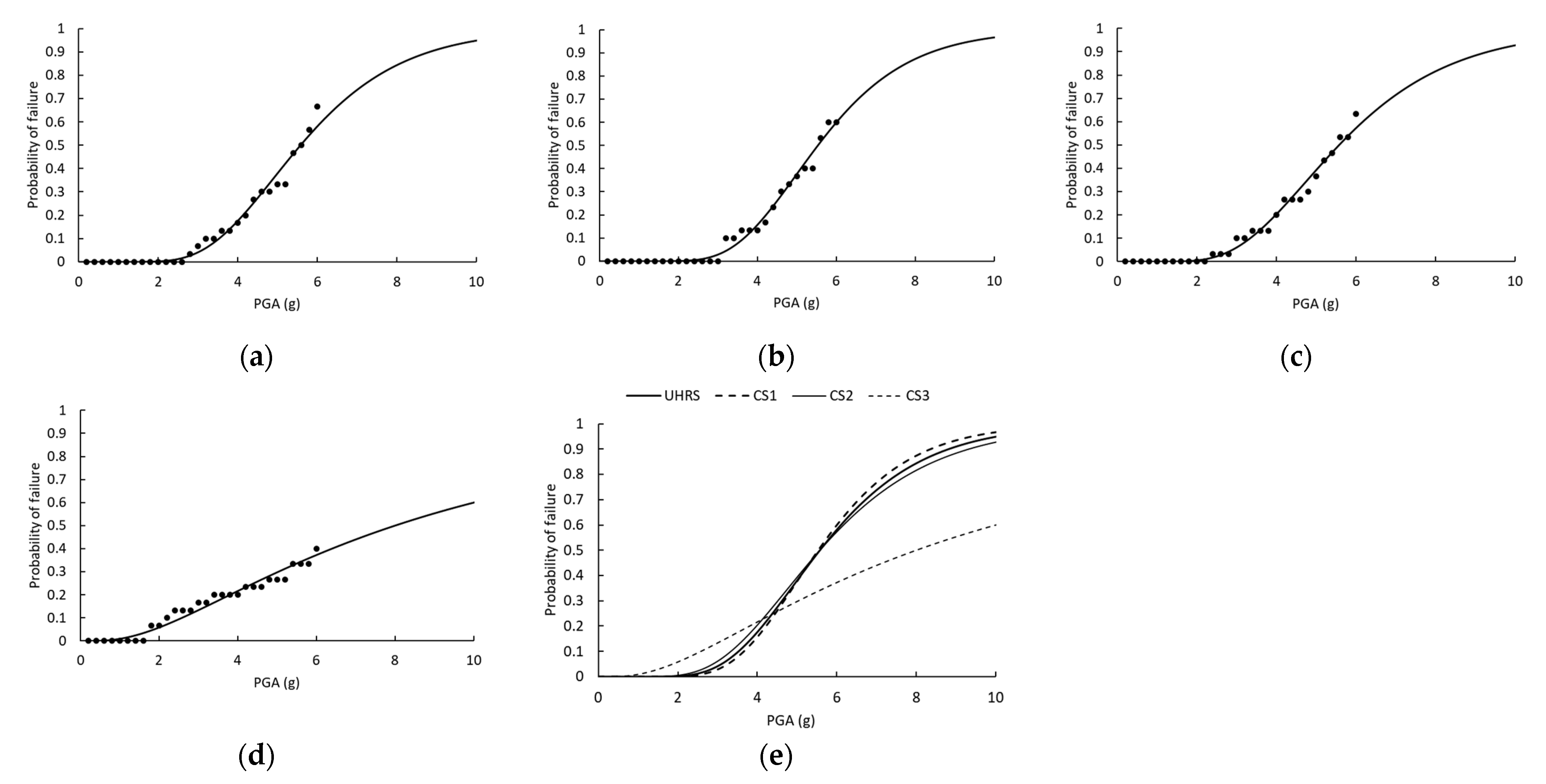
5.2. Seismic Fragility Curve
5.3. Median Capacity
5.4. Logarithmic Standard Deviation
5.5. HCLPF Capacity
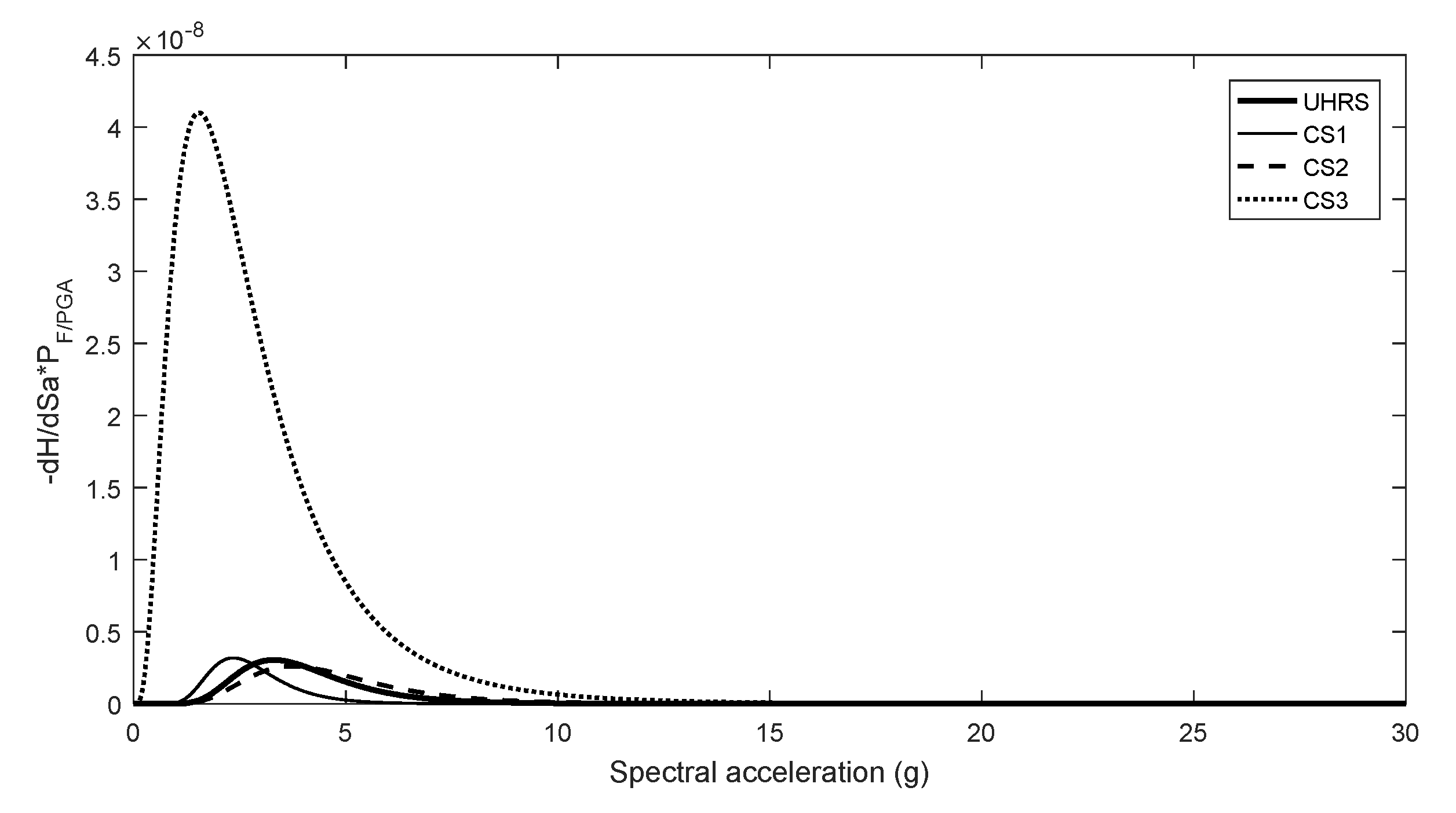
5.6. Probabilistic Seismic Risk
6. Conclusions
- (1)
- By selecting a control frequency close to the dominant frequency in the structural response, the seismic input model based on the CS produces a similar median capacity compared to the UHRS-based seismic input model and reduces the logarithmic standard deviation due to randomness.
- (2)
- When a CS-based seismic input is applied to structural models simulating uncertainty, the randomness due to seismic input accounts for a large proportion of the combined logarithmic standard deviation, and the proportion of uncertainty decreases compared with the UHRS-based seismic input.
- (3)
- When the CS-based seismic input with a control frequency close to the dominant frequency is adopted, the HCLPF capacity is enhanced, and the probability of failure is reduced considerably compared with the result from the UHRS-based seismic input.
- (4)
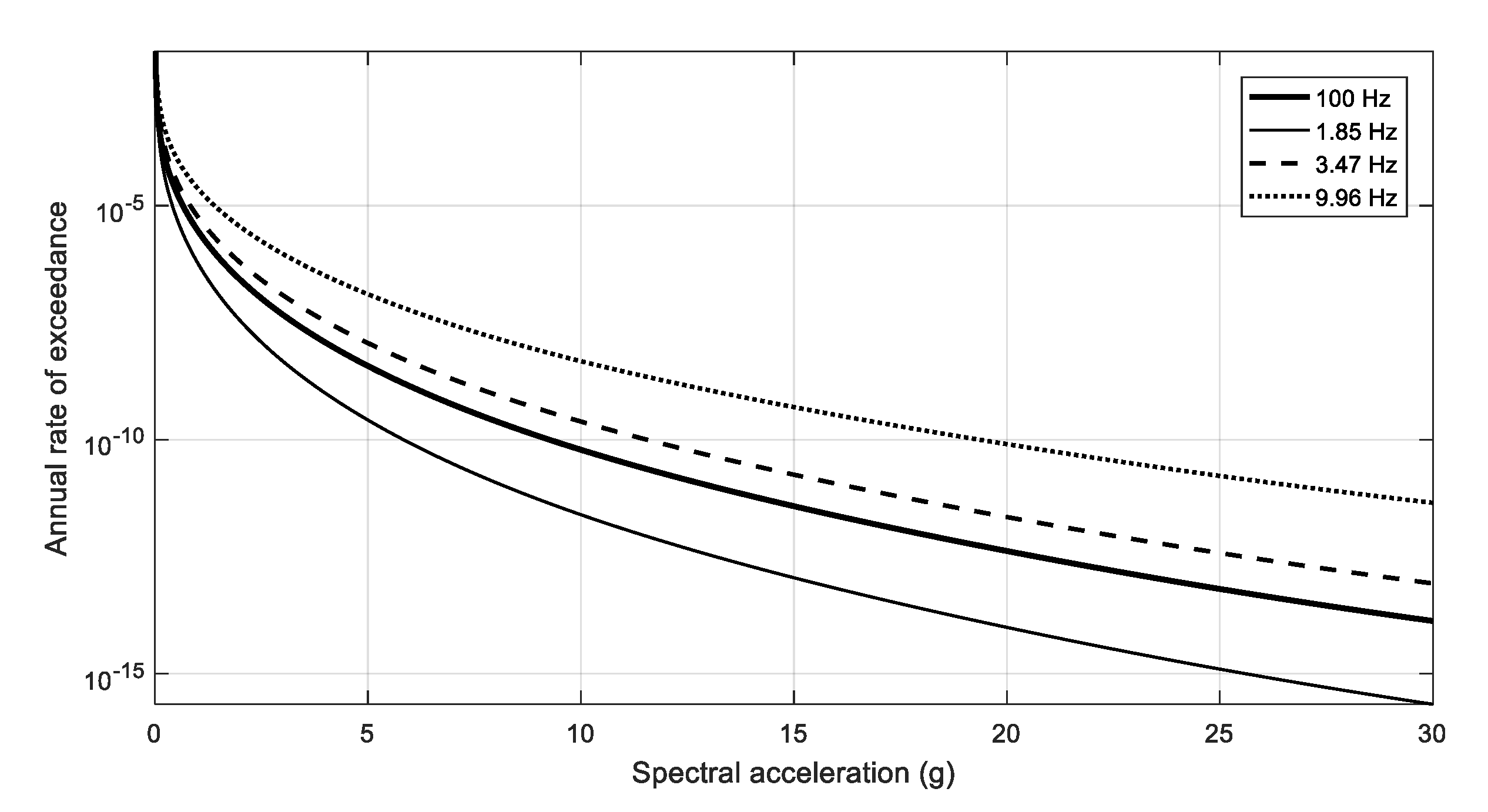
- In addition, the CS-based seismic input has an advantage in that the basis for selecting the seismic hazard curve for seismic risk assessment is clear.
- (5)
- Spectral shape variability and component-to-component variability are important sources of randomness that characterize the CS and need to be introduced in a rigorous manner as applied to UHRS.
Author Contributions
Funding
Conflicts of Interest
References
- EPRI. Seismic Fragility and Seismic Margin Guidance for Seismic Probabilistic Risk Assessments; EPRI 3002012994; EPRI: Palo Alto, CA, USA, 2018. [Google Scholar]
- Choi, I.K.; Ahn, S.M.; Choun, Y.S. Seismic Fragility Analysis of PSC Containment Building by Nonlinear Anaysis. Earthq. Eng. Soc. Korea 2006, 10, 63–74. [Google Scholar]
- Choi, I.K.; Choun, Y.S.; Ahn, S.M.; Seo, J.M. Probabilistic Seismic Risk Analysis of CANDU Containment Structure Near-Fault Earthquakes. Nucl. Eng. Des. 2008, 238, 1382–1391. [Google Scholar] [CrossRef]
- Kim, M.K.; Choi, I.K. Effect of Evaluation Response Spectrum on the Seismic Risk of Structure. Earthq. Eng. Soc. Korea 2009, 13, 39–46. [Google Scholar]
- Hahm, D.; Seo, J.M.; Choi, I.K.; Rhee, H.M. Uniform Hazard Spectrum Evaluation Method for Nuclear Power Plants on Soil Sites based on the Hazard Spectra of Bedrock Sites. Earthq. Eng. Soc. Korea 2012, 16, 35–42. [Google Scholar] [CrossRef] [Green Version]
- Baker, J.W. Conditional Mean Spectrum: Tool for Ground-Motion Selection. J. Struct. Eng. 2011, 137, 322–331. [Google Scholar] [CrossRef]
- ASCE/SEI 7-16. Minimum Design Loads and Associated Creteria for Buildings and other Structures; American Society of Civil Engineers: Reston, VA, USA, 2017. [Google Scholar]
- Haselton, C.B.; Baker, J.W.; Stewart, J.P.; Whittaker, A.S.; Luco, N.; Fry, A.; Hamburger, R.O.; Zimmerman, R.B.; Hooper, J.D.; Charney, F.A.; et al. Response History Analysis for the Design of New Buildings in the NEHRP Provisions and ASCE/SEI 7 Standard: Part Ⅰ—Overview and Specification of Ground Motions; Earthquake Engineering Research Institute: Seoul, Korea, 2017; Volume 33, pp. 373–395. [Google Scholar]
- Haselton, C.B.; Fry, A.; Hamburger, R.O.; Baker, J.W.; Zimmerman, R.B.; Luco, N.; Elwood, K.J.; Hooper, J.D.; Charney, F.A.; Pekelinicky, R.G.; et al. Response History Analysis for the Design of New Buildings in the NEHRP Provisions and ASCD/SEI 7 Standard: Part Ⅱ—Structural Aanlysis Procedures and Acceptance Criteria; Earthquake Engineering Research Institute: Seoul, Korea, 2017; Volume 33, pp. 397–417. [Google Scholar]
- Jarrett, J.A.; Zimmerman, R.B.; Charney, F.A.; Jalalian, A. Response—History Analysis for the Design of New Buildings in the NEHRP Provisions and ASCE/SEI 7 Sthandard: Part Ⅳ-A Study of Assumptions; Earthquake Engineering Research Institute: Seoul, Korea, 2017; Volume 33, pp. 449–468. [Google Scholar]
- Zimmerman, R.B.; Baker, J.W.; Hooper, J.D.; Bono, S.; Haselton, C.B.; Engel, A.; Hamburger, R.O.; Celikbas, A.; Jalalian, A. Response History Analysis for the Design of New Buildings in the NEHRP Provisions and ASCD/SEI 7 Standard: Part Ⅲ—Example Applications Illustrating the Recommended Methodology. Earthquake Engineering Research Institute: Seoul, Korea, 2017; Volume 33, pp. 419–447. [Google Scholar]
- Renault, P. PEGASOS refinement project: New findings and challenges from a PSHA for Swiss Nuclear Power Plants. In Proceedings of the Transactions, SMiRT 21, New Delhi, India, 6–11 November 2011. [Google Scholar]
- Renault, P.; Kurmann, D. Comparison of uniform hazard spectra and conditional spectra approach in the framework of fragility curve development. In Proceedings of the Transactions, SMiRT 22, San Francisco, CA, USA, 18–23 August 2013. [Google Scholar]
- Renault, P.; Proske, D.; Kurmann, D.; Asfura, A.P. Evaluation of the seismic risk of a NPP building using the conditional spectra approach. In Proceedings of the Transactions, SMiRT 23, Manchester, UK, 10–14 August 2015. [Google Scholar]
- Renault, P.; Asfura, A.P. Comarison of approaches for selecting and adjusting time histories to be used in seismic fragility analyses. In Proceedings of the Transactions, SMiRT 25, Charlotte, NC, USA, 4–9 August 2019. [Google Scholar]
- Reed, J.W.; Kennedy, R.P. Methodology for Developing Seismic Fragilities; EPRI TR-103959; Electric Power Research Institute: Palo Alto, CA, USA, 1994. [Google Scholar]
- Cho, H.; Koh, H.M.; Hyun, C.H.; Shin, H.M. Seismic damage assessment of nuclear power plant containment structures. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004; Volume 2972, pp. 1–6. [Google Scholar]
- Tavakkoli, I.; Kianoush, M.R.; Abrishami, H.; Han, X. Finite element modelling of a nuclear containment structure subjected to high internal pressure. Int. J. Press. Vessels Pip. 2017, 153, 59–69. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Thusa, B.; Park, H.; Azad, M.S.; Lee, T.H. Efficiency of various structural modeling schemes on evaluating seismic performance and fragility of APR1400 containment building. Nuclear Eng. Technol. 2021, 53, 2696–2707. [Google Scholar] [CrossRef]
- Li, Z.; Guo, J.; Jin, S.; Zhang, P.; Gong, J. Fragility analysis and probabilistic safety evaluation of the nuclear containment structure under different prestressing loss conditions. Ann. Nuclear Energy 2022, 167, 108862. [Google Scholar] [CrossRef]
- Korea Electrical Power Corporation; Korea Hydro & Nuclear Power Co., Ltd. APR1400 DESIGN CONTROL DOCUMENT TIER2. APR1400- K-X-FS-14002-NP REVISION 0; Korea Electrical Power Corporation: Busan, Korea; Korea Hydro & Nuclear Power Co., Ltd.: Gyeongju-si, Korea, 2014. [Google Scholar]
- Park, W.H. Seismic Fragility Analysis of Nuclear Power Plant Containment Structures Based on Conditional Spectrum; Incheon National University: Incheon, Korea, 2019. [Google Scholar]
- Available online: https://www.midasuser.com/ (accessed on 27 April 2022).
- Japan Electric Association (JEA). Technical Guidelines for a Seismic Design of Nuclear Power Plants: Translation of JEAG 4601-1987, JEAG-4601; Japan Electric Association: Tokyo, Japan, 1991. [Google Scholar]
- Chang, G.A.; Mander, J.B. Seismic Energy Based Fatigue Damage Analysis of Bridge Columns: Part 1—Evaluation of Seismic Capacity; NCEER Technical Rep. No. NCEER-94-0006; State University of New York: Buffalo, NY, USA, 1994. [Google Scholar]
- Ogaki, Y.; Kobayashi, M.; Takeda, T.; Yamaguchi, T.; Yoshizaki, K.; Sugano, S. Shear strength tests of prestressed concrete containment vessels. In Proceedings of the SMiRT-6, Paris, France, 17–21 August 1981; Volume 13. [Google Scholar]
- American Society of Civil Engineers. Seismic Design Criteria for Structures, Systems, and Components in Nuclear Facilities; ASCE/SEI 43-05; American Society of Civil Engineers: Reston, VA, USA, 2005. [Google Scholar]
- Korea Atomic Energy Research Institute. Development of Ground Response Spectrum for Seismic Risk Assessment; Korea Meteorological Administration: Seoul, Korea, 2018; p. 171.
- Atkinson, G.M.; Boore, D.M. Earthquake Ground-Motion Prediction Equations for Eastern North America. Bull. Seismol. Soc. Am. 2006, 96, 2181–2205. [Google Scholar] [CrossRef]
- Lin, T.; Harmsen, S.C.; Baker, J.W.; Luco, N. Conditional spectrum computation incorporating multiple causal earthquakes and ground motion prediction models. Bull. Seismol. Soc. Am. 2013, 103, 1103–1116. [Google Scholar] [CrossRef]
- Al Atik, L.; Abrahamson, N.A. An improved method for non-stationary spectral matching. Earthq. Spectra 2010, 26, 601–617. [Google Scholar] [CrossRef] [Green Version]
- US Nuclear Regulatory Commission. US Nuclear Regulatory Commission Standard Review Plan 3.7.1; Revision 4. NUREG-0800; U.S. Nuclear Regulatory Commission: Washington, DC, USA, 2014.
- Jayaram, N.; Lin, T.; Baker, J.W. A Computationally Efficient Ground—Motion Selection Algorithm for Matching a Target Response Spectrum Mean and Variance. Earthq. Spectra 2011, 27, 797–815. [Google Scholar] [CrossRef]
- PEER Ground Motion Database. Available online: https://ngawest2.berkeley.edu/ (accessed on 27 April 2022).
- Boore, D.M.; Watson-Lamprey, J.; Abrahamson, N.A. Orientation-independent measures of ground motion. Bull. Seismol. Soc. Am. 2006, 96, 1502–1511. [Google Scholar] [CrossRef]
- Helton, J.C.; Davis, F.J. Latin hypercube sampling and the propagation of uncertainty in analyses of complex systems. Reliab. Eng. Syst. Saf. 2003, 81, 23–69. [Google Scholar] [CrossRef] [Green Version]
- Vamvatsikos, D.C.; Cornell, C.A. Incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 2002, 31, 491–514. [Google Scholar] [CrossRef]
- Baker, J.W. Efficient analytical fragility function fitting using dynamic structural analysis. Earthq. Spectra 2014, 31, 579–599. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Natural Frequency (Hz) | Mass Participation Ratio (%) | ||
|---|---|---|---|---|
| LMS Model | FE Model | LMS Model | FE Model | |
| 1st | 3.65 | 3.43 | 76.9 | 70.5 |
| 2nd | 11.2 | 10.2 | 14.4 | 19.2 |
| 3rd | 20.0 | 18.4 | 3.85 | 3.22 |
| Modeling Parameter | Median Value | Logarithmic Standard Deviation [1] |
|---|---|---|
| (MPa) | 41.4 | 0.14 |
| 0.002 | 0.17 | |
| (MPa) | 3.41 | 0.13 |
| (MPa) 1) | 30,241 | 0.07 |
| (MPa) 1) | 12,096 | 0.07 |
| (MPa) | 455 | 0.06 |
| (MPa) | 200,000 | 0 |
| (MPa) | 1810 | 0.06 |
| (MPa) | 193,000 | 0 |
| Shear strength equation | 1 | 0.16 |
| Damping ratio (%) | 0.05 | 0.35 |
| Category | Median Allowable Drift Ratio | Logarithmic Standard Deviation | |
|---|---|---|---|
| Bending controlled walls | 0.007 | 0.34 | |
| 0.009 | |||
| Shear controlled walls | 0.007 | ||
| Response Spectrum for Seismic Input | Control Frequency (Hz) | Spectral Acceleration (g) | , Number of PGA in UHRS 1) |
|---|---|---|---|
| CS1 | 1.85 | 0.153 | 0.648 |
| CS2 | 3.47 | 0.311 | 1.318 |
| CS3 | 9.96 | 0.517 | 2.191 |
| Seismic Input Model | Median Capacity (g) | Logarithmic Standard Deviation | |||
|---|---|---|---|---|---|
| Median Model | LHS Model | Median Model | LHS Model | ||
| UHRS | 5.44 | 5.57 | 0.183 1) | 0.357 1) | 0.307 |
| CS1 | 5.54 | 5.53 | 0.273 | 0.322 | 0.171 |
| CS2 | 5.49 | 5.57 | 0.310 | 0.401 | 0.255 |
| CS3 | 8.83 | 8.00 | 0.864 | 0.883 | 0.183 |
| Direction | Seismic Input Model | ||
|---|---|---|---|
| CS1 | CS2 | CS3 | |
| H1 | 0.24 | 0.24 | 0.24 |
| H2 | 0.25 | 0.23 | 0.24 |
| Seismic Input Model | ||
|---|---|---|
| UHRS | 2.442 (1.00) | 2.378 (1.00) |
| CS1 | 2.663 (1.09) | 2.615 (1.10) |
| CS2 | 2.162 (0.89) | 2.156 (0.91) |
| CS3 | 1.569 (0.64) | 1.128 (0.47) |
| Hazard Curve | Fragility Curve | |||
|---|---|---|---|---|
| H (100 Hz) | 0.955 × 10−8 | - | - | - |
| H (1.85 Hz) | 0.812 × 10−8 | 0.658 × 10−8 | - | - |
| H (3.47 Hz) | 0.727 × 10−8 | - | 1.01 × 10−8 | - |
| H (9.96 Hz) | 0.769 × 10−8 | - | - | 13.2 × 10−8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.-H.; Shin, D.-H.; Jeon, S.-H. Seismic Fragility and Risk Assessment of a Nuclear Power Plant Containment Building for Seismic Input Based on the Conditional Spectrum. Appl. Sci. 2022, 12, 5176. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105176
Park J-H, Shin D-H, Jeon S-H. Seismic Fragility and Risk Assessment of a Nuclear Power Plant Containment Building for Seismic Input Based on the Conditional Spectrum. Applied Sciences. 2022; 12(10):5176. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105176
Chicago/Turabian StylePark, Ji-Hun, Dong-Hyun Shin, and Seong-Ha Jeon. 2022. "Seismic Fragility and Risk Assessment of a Nuclear Power Plant Containment Building for Seismic Input Based on the Conditional Spectrum" Applied Sciences 12, no. 10: 5176. https://0-doi-org.brum.beds.ac.uk/10.3390/app12105176