
Water Surface and Ground Control of a Small Cross-Domain Robot Based on Fast Line-of-Sight Algorithm and Adaptive Sliding Mode Integral Barrier Control


Abstract
:1. Introduction
- Design a CDR focus on analyzing its motion characteristics on the ground and water surface, and develop a mathematical robot model of kinematics and dynamics;
- A FLOS navigation algorithm based on FESO without small angle assumption is designed for CDR. FLOS is composed based on finite-time stability theory. Compare simulation results with ALOS and ELOS and make a comparative analysis;
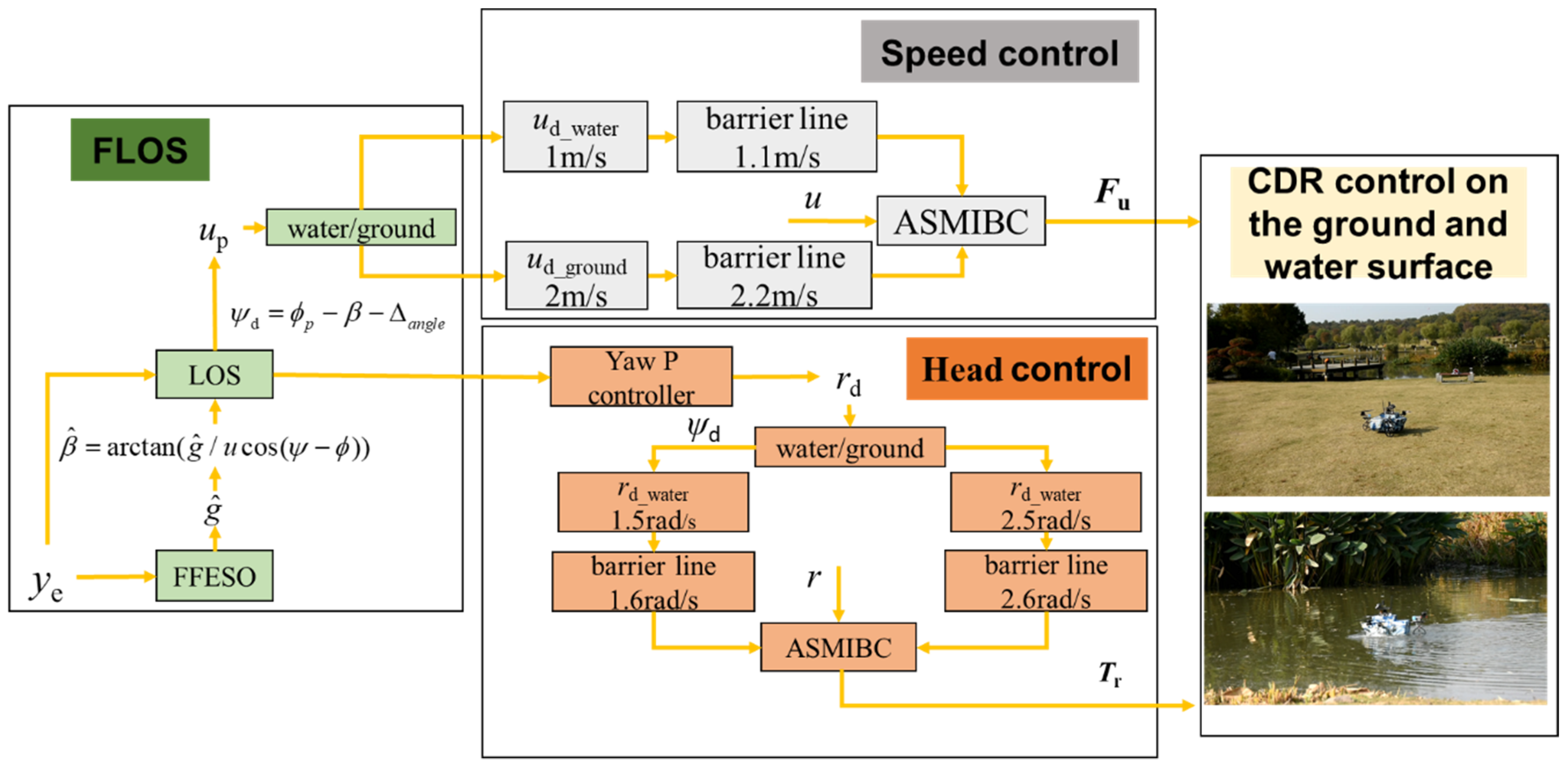
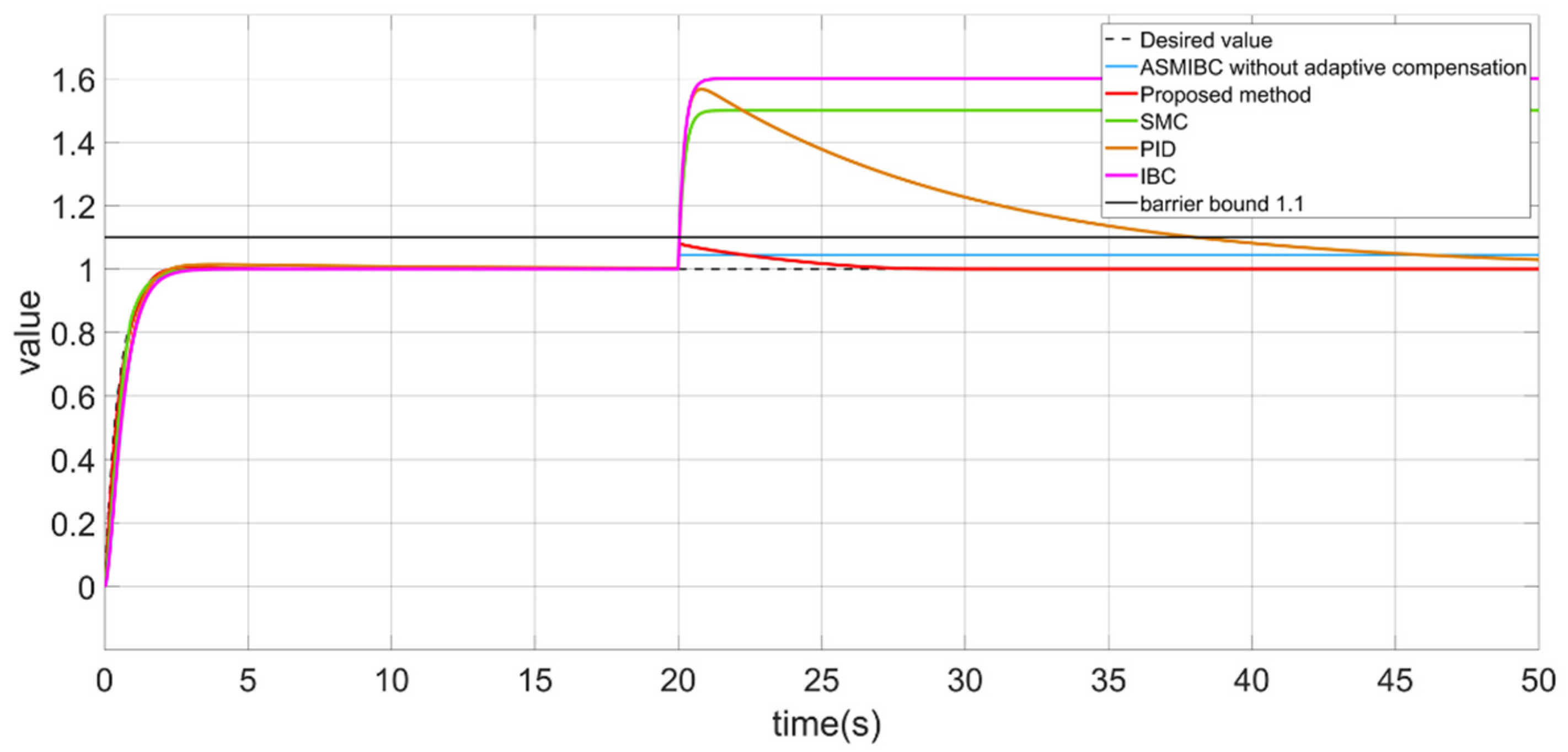
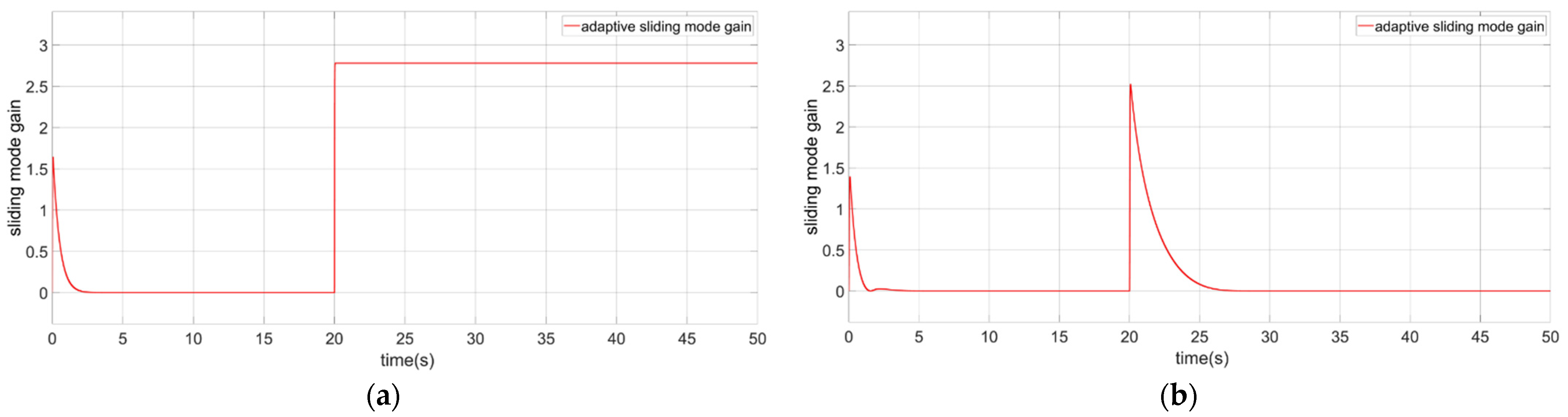
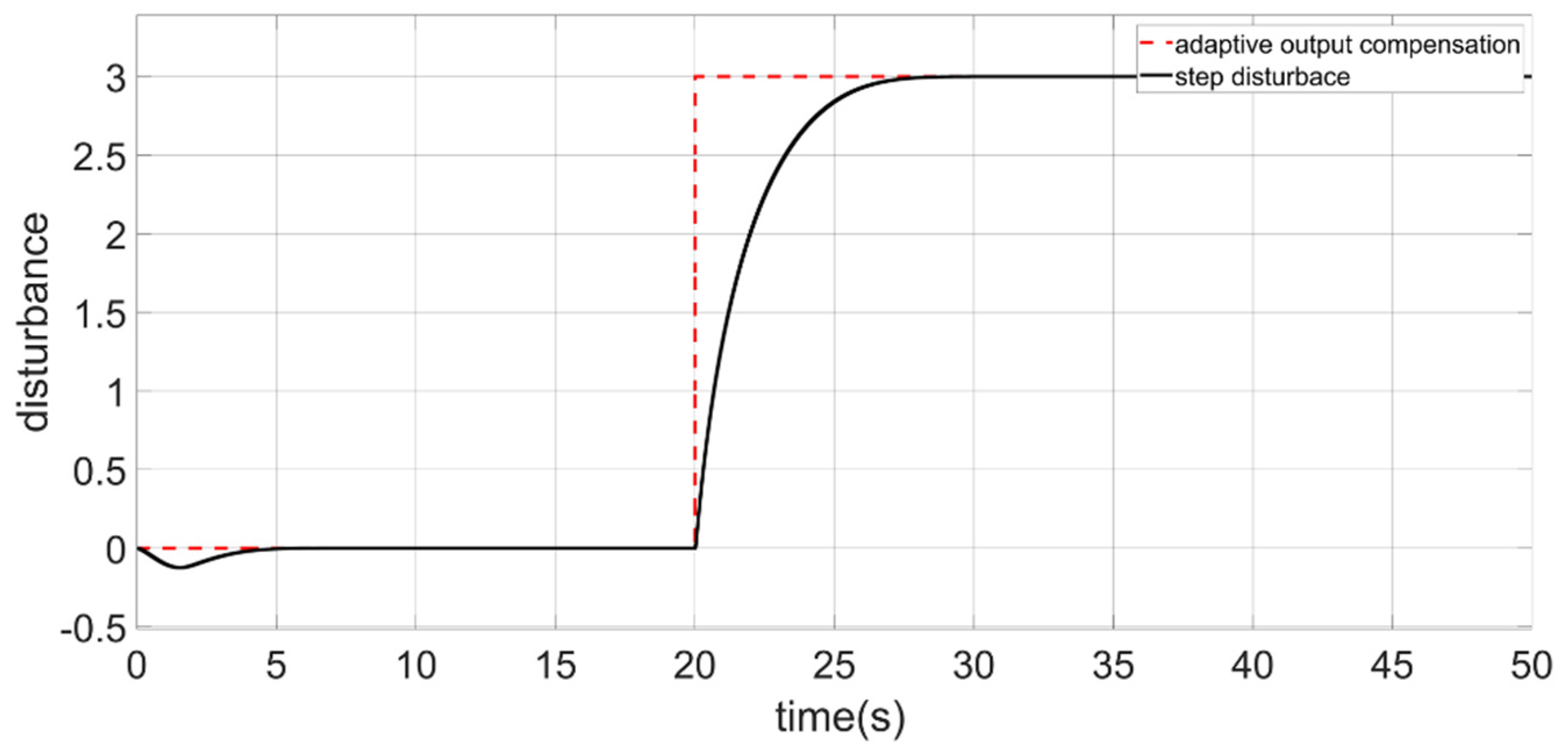
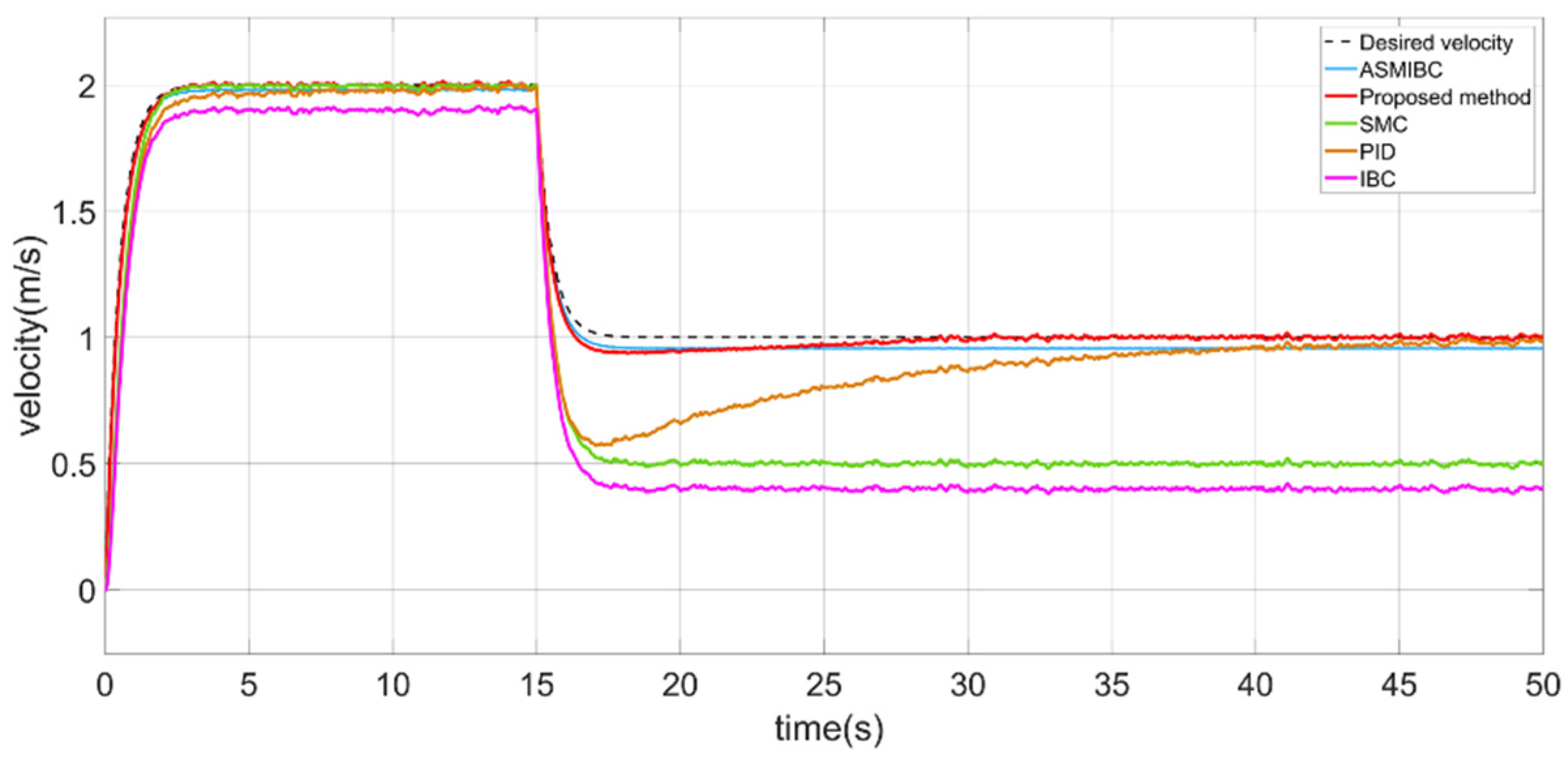
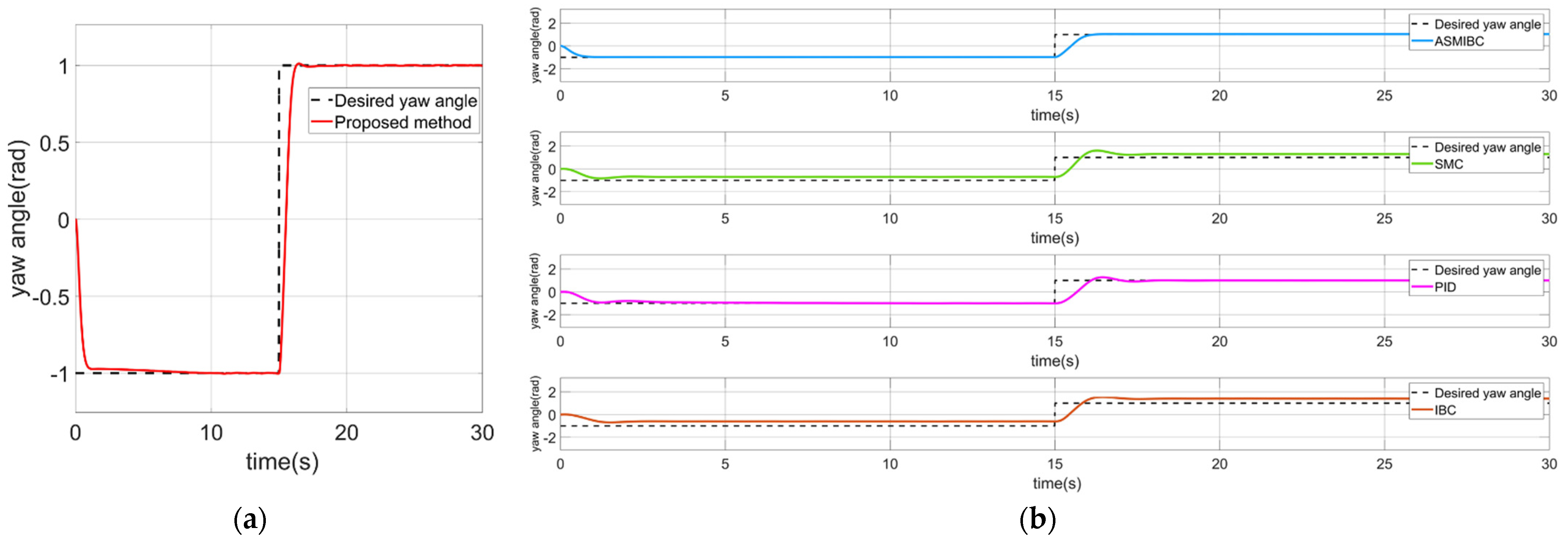
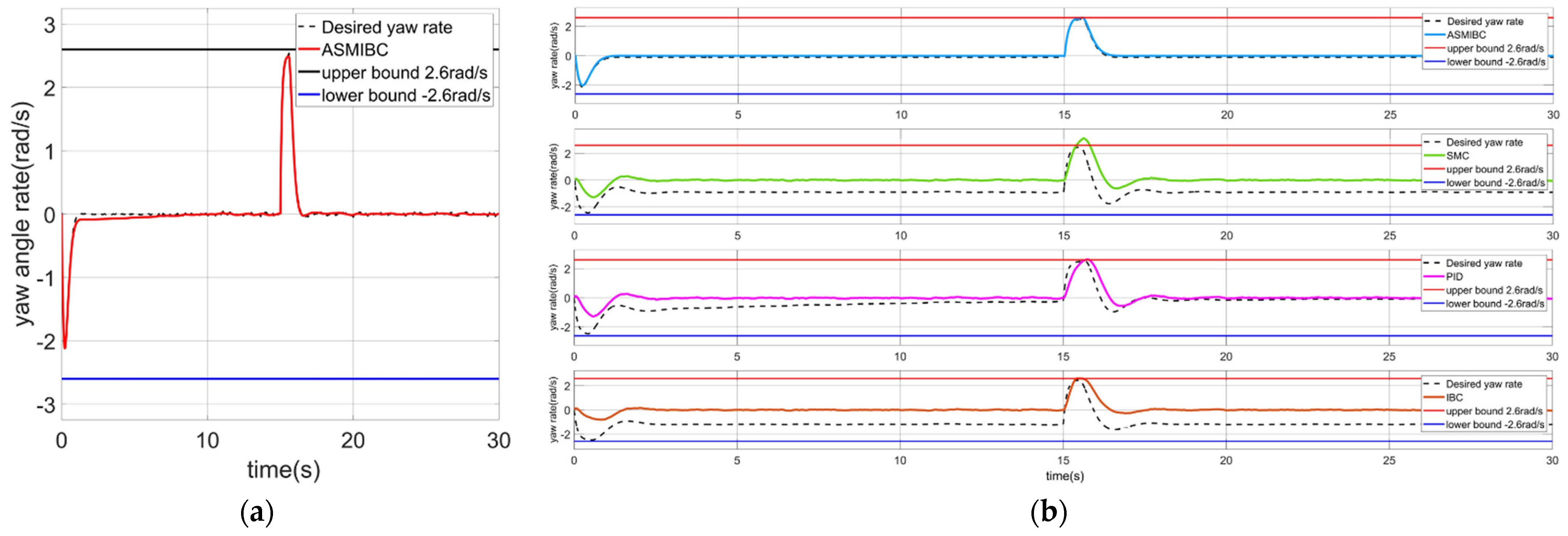
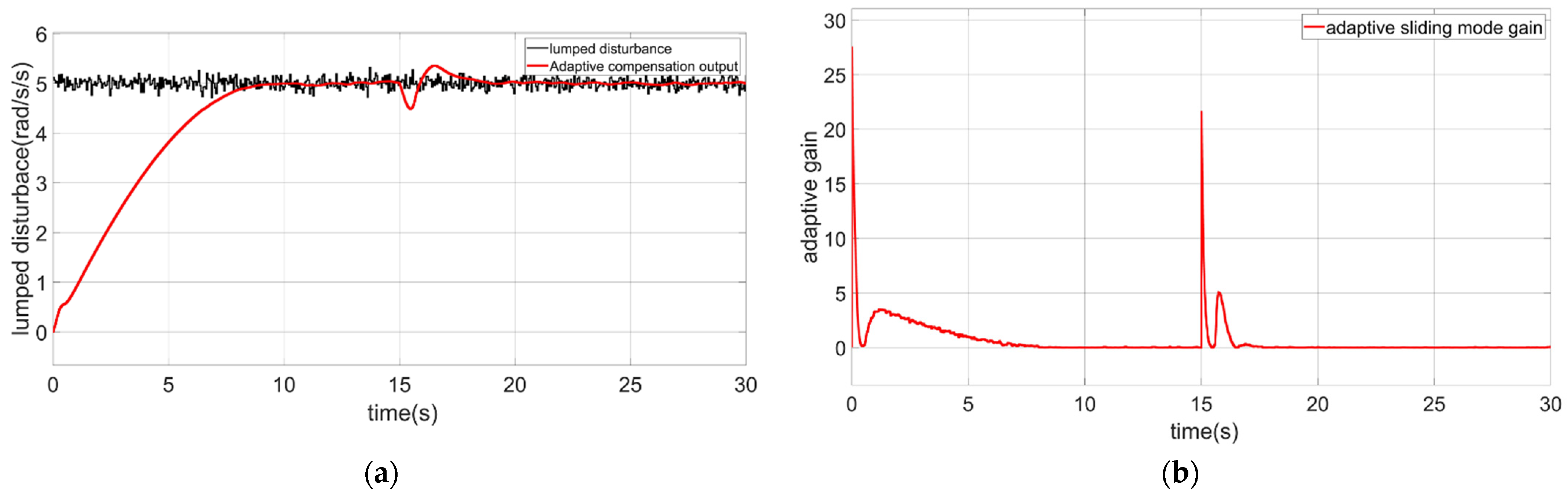
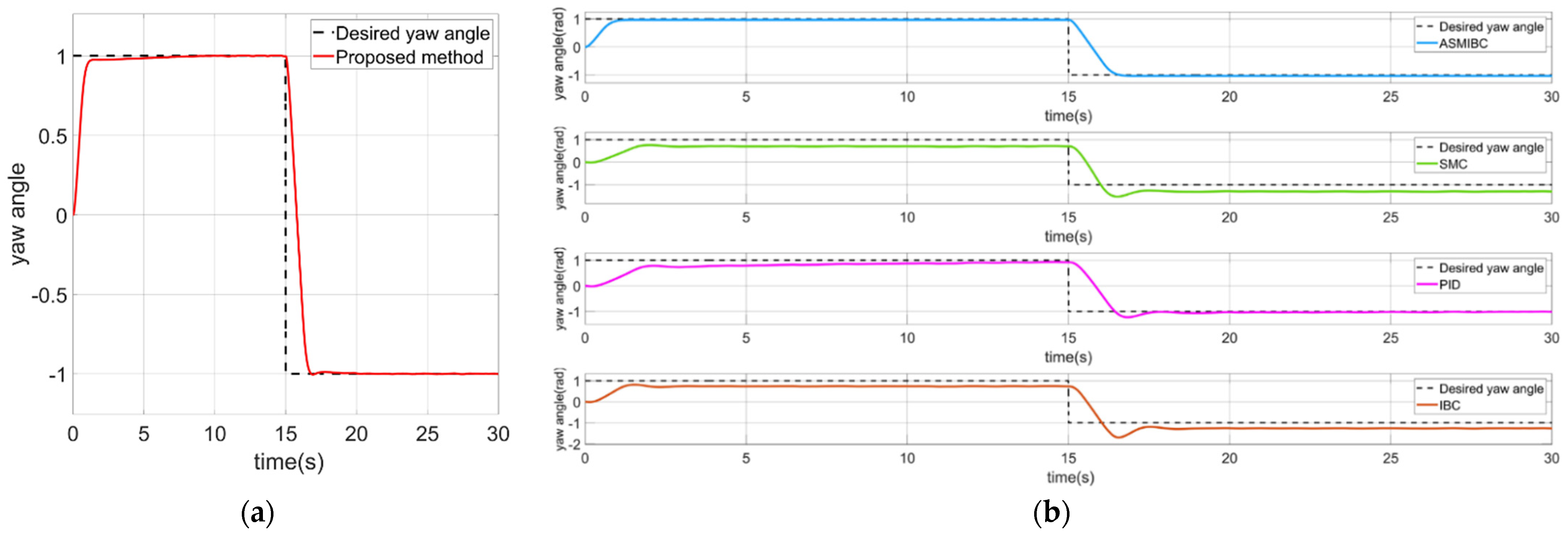
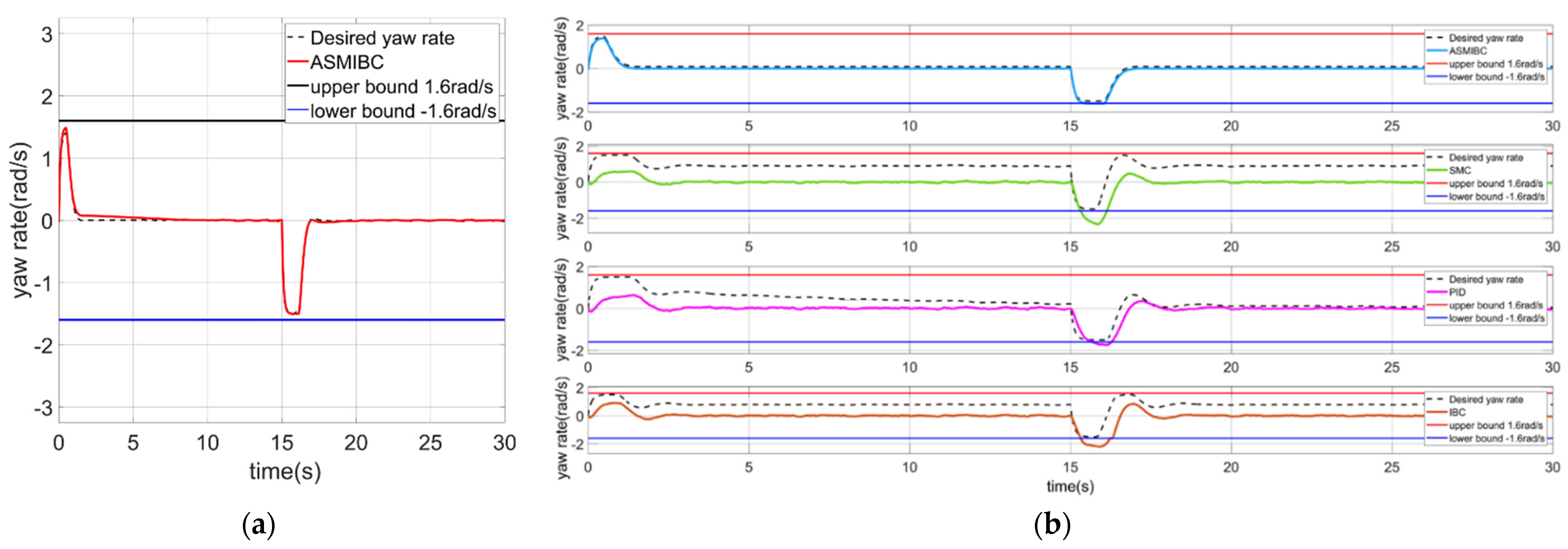
- ASMIBC is used to constrain the velocity and yaw angular velocity of the CDR in different environments. This control method solves the constraint failure of the traditional integral barrier control (IBC) when the desired state is a constant. The gain of the sliding mode is adaptively adjusted by the error between the limit state and the actual state, which improves the robustness of the controller. In addition, adaptive rate is designed for unknown and time-varying lumped disturbances. Compare simulation results with other control methods, like SMC, PID, and traditional IBC.
2. Preliminaries Work and CDR Introduction
2.1. Preliminaries
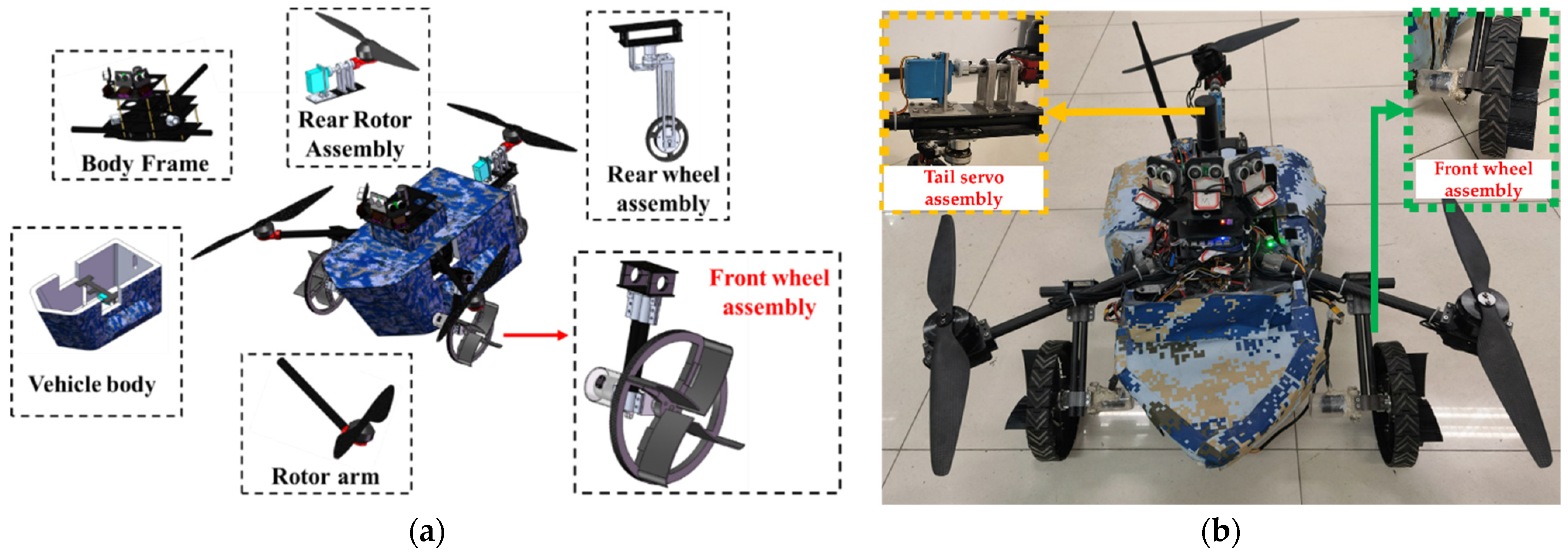
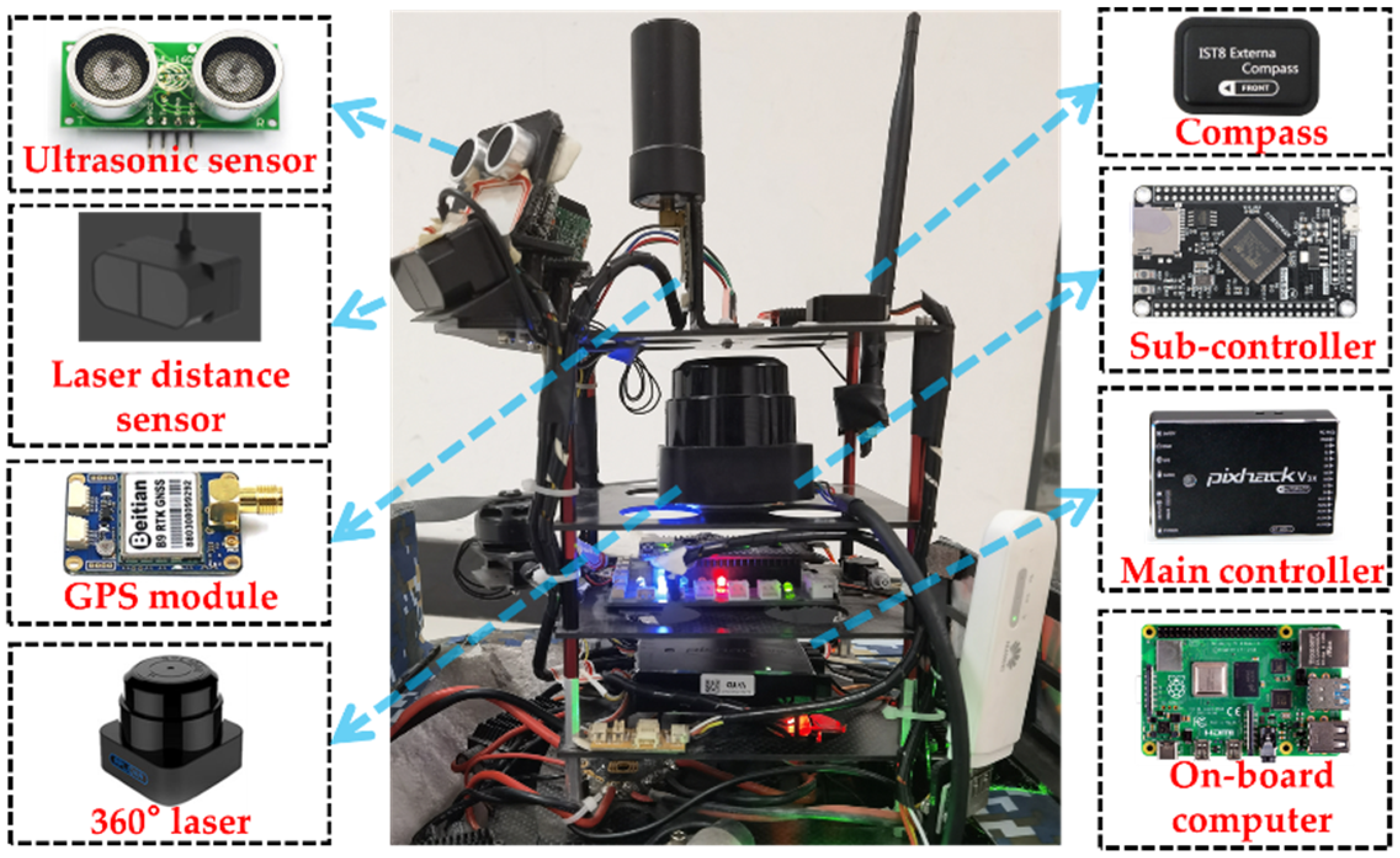
2.2. Cross-Domain Robot
3. Mathematic Model of CDR on the Ground and Water Surface
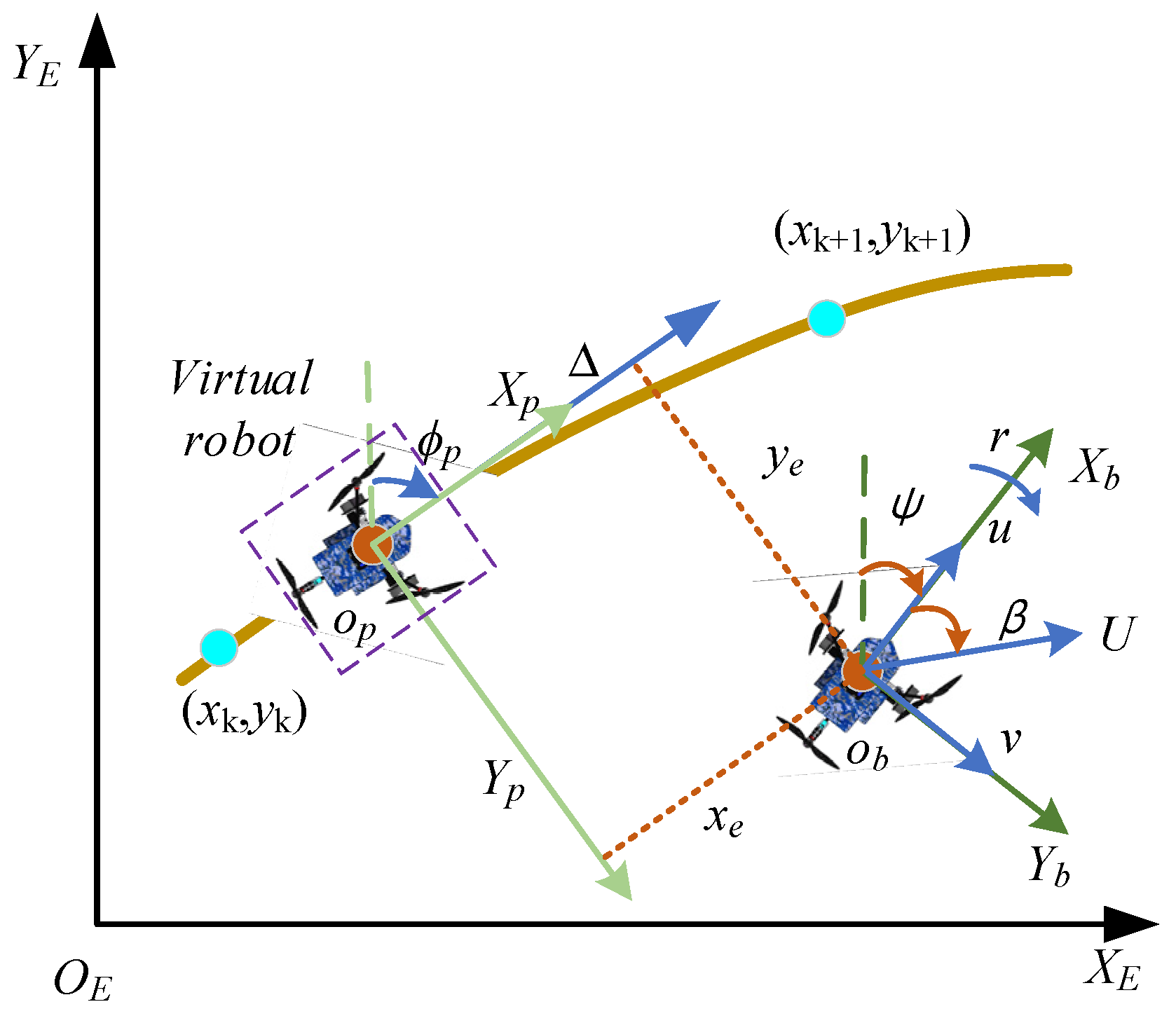
3.1. CDR Kinematic Model in Frenet-Secret Frame
3.2. Dynamic Model of CDR on the Ground and the Water Surface
4. FLOS Algorithm and ASMIBC
4.1. FLOS with FESO
4.2. ASMIBC for Yaw Angle and Linear Velocity of the CDR
5. Simulink Results and Discussion
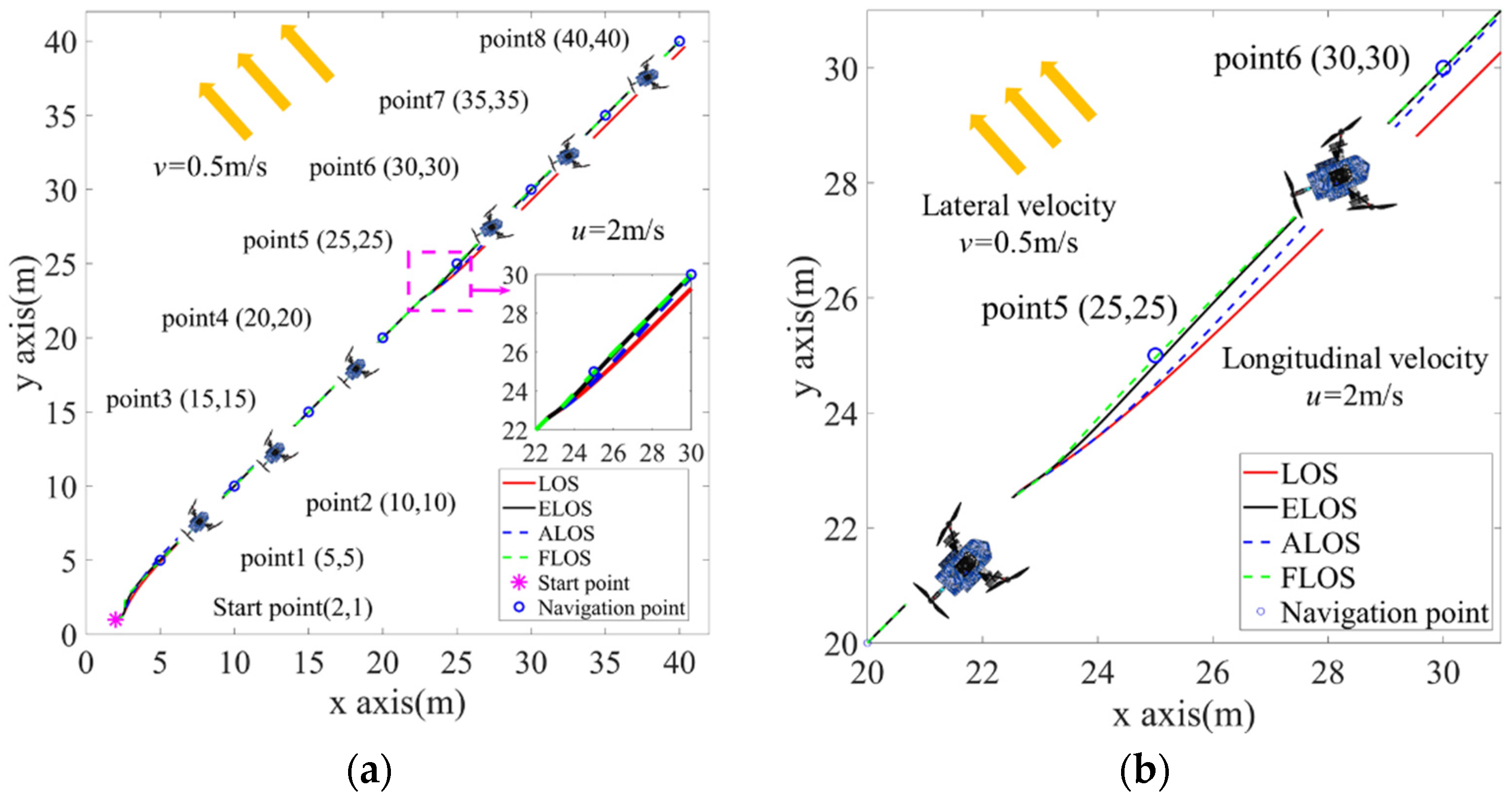
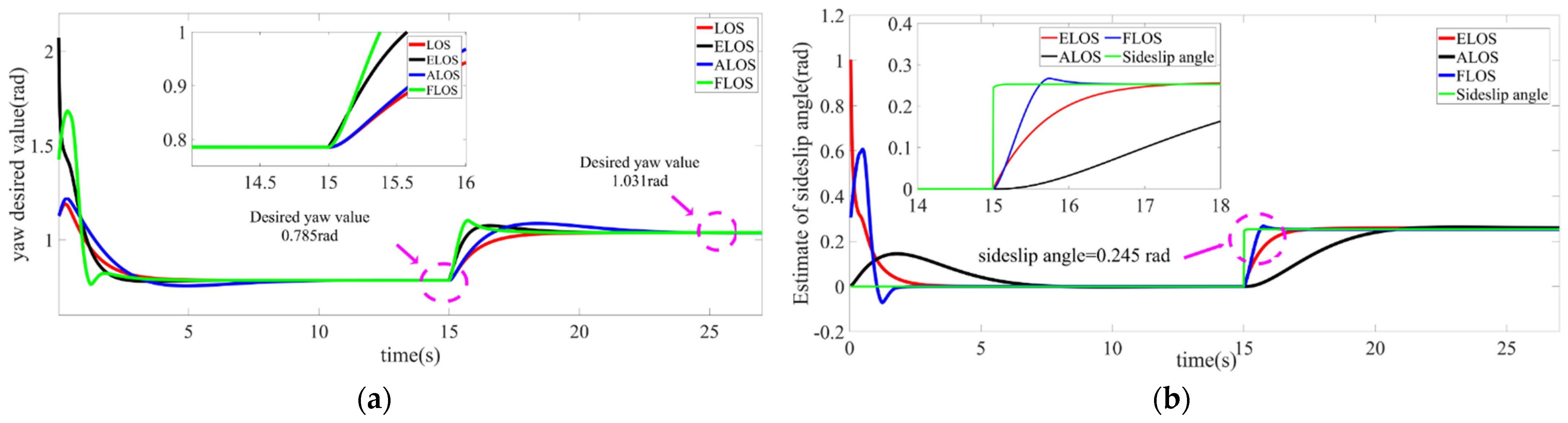
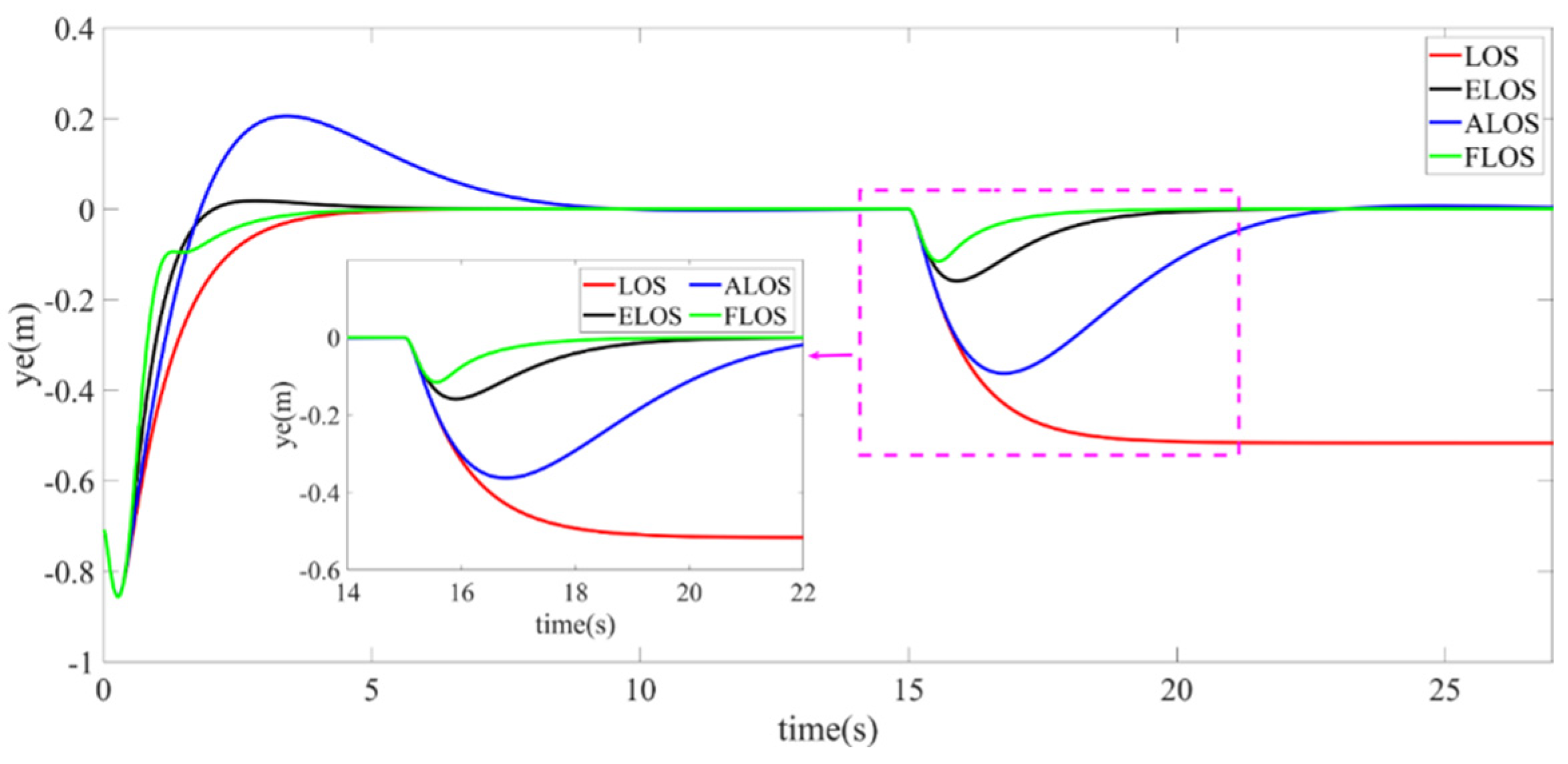
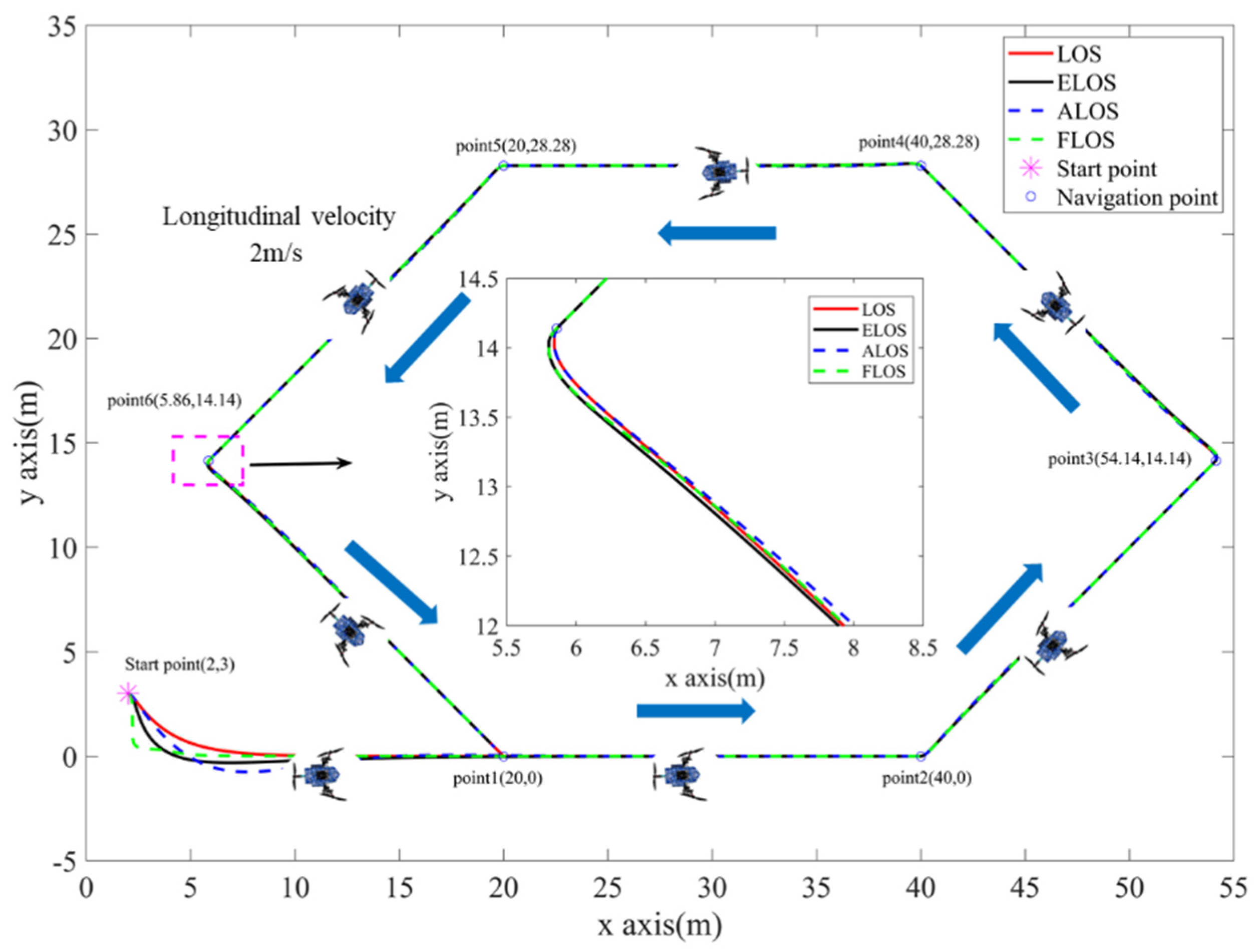
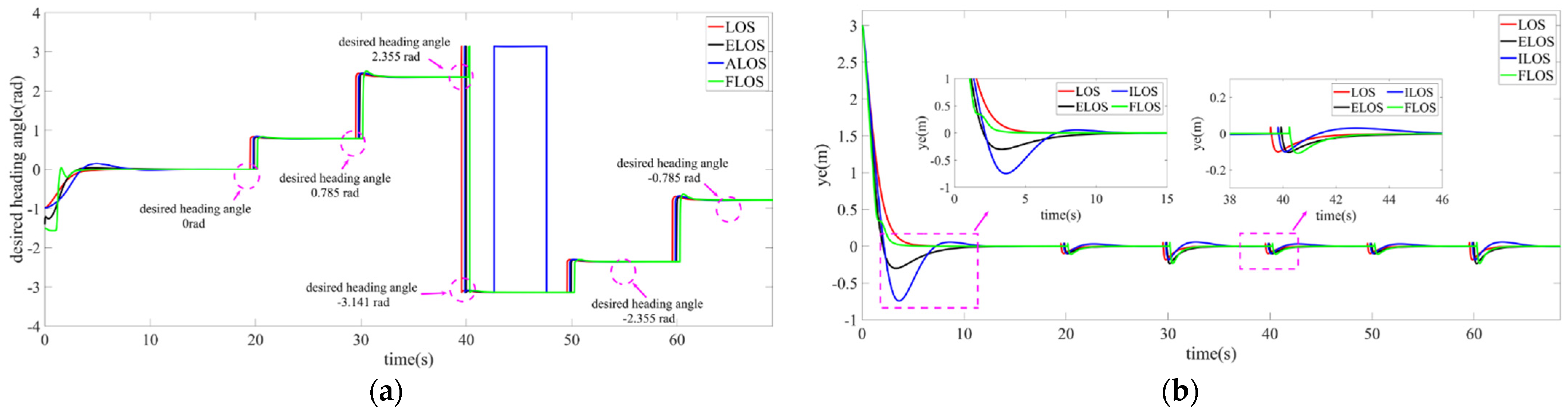
5.1. Analysis of FLOS Simulation Results
5.1.1. FLOS Navigation Algorithms in Case 1
5.1.2. FLOS Navigation Algorithms in Case 2
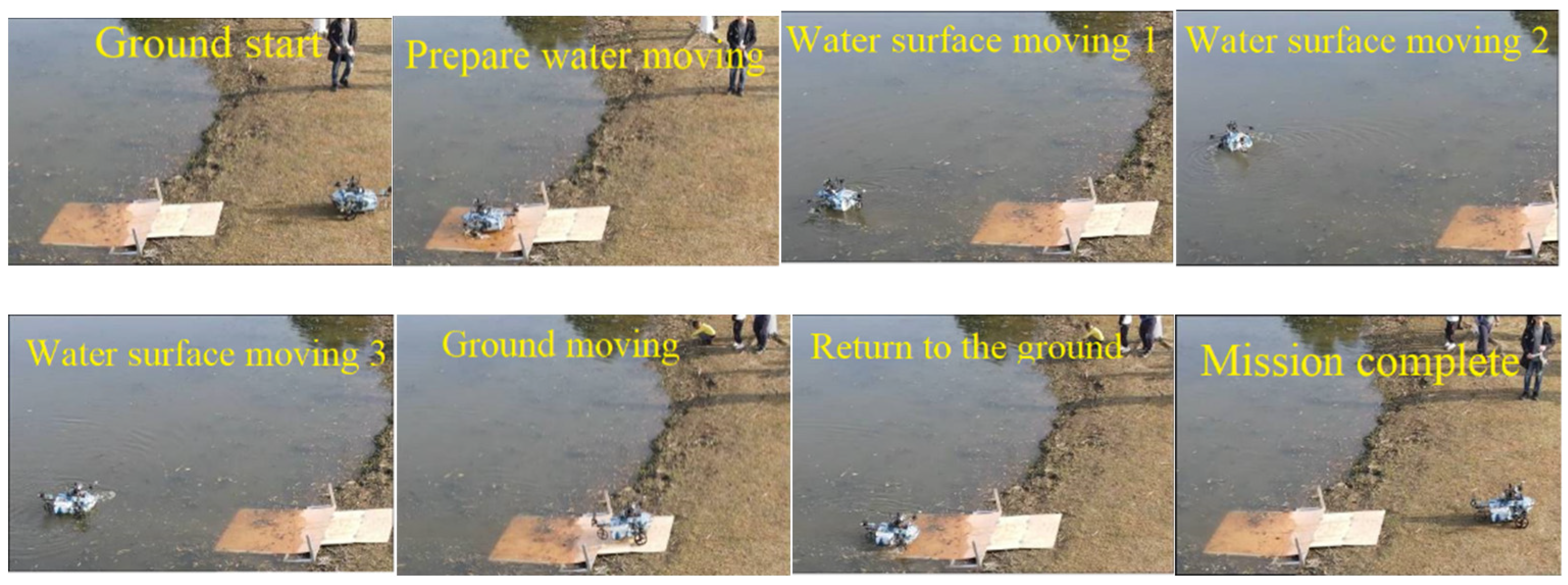
5.2. The Results of CDR Movement on the Ground and the Water Surface
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Guo, J.; Zhang, K.; Guo, S.; Li, C.; Yang, X. Design of a New Type of Tri-habitat Robot. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1508–1513. [Google Scholar]
- Tan, Q.; Zhang, X.; Liu, H.; Jiao, S.; Zhou, M.; Li, J. Multimodal Dynamics Analysis and Control for Amphibious Fly-Drive Vehicle. IEEEASME Trans. Mechatron. 2021, 26, 621–632. [Google Scholar] [CrossRef]
- Li, Y.; Lu, H.; Nakayama, Y.; Kim, H.; Serikawa, S. Automatic road detection system for an air–land amphibious car drone. Future Gener. Comput. Syst. 2018, 85, 51–59. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, G.; Zhang, J.; Cheng, S.; Fu, M. Design, modeling and control of a novel amphibious robot with dual-swing-legs propulsion mechanism. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 559–566. [Google Scholar]
- Liu, H.; Shi, L.; Guo, S.; Xing, H.; Hou, X.; Liu, Y. Platform Design for a Natatores-like Amphibious robot. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1627–1632. [Google Scholar]
- Zhong, B.; Zhang, S.; Xu, M.; Zhou, Y.; Fang, T.; Li, W. On a CPG-Based Hexapod Robot: AmphiHex-II with Variable Stiffness Legs. IEEEASME Trans. Mechatron. 2018, 23, 542–551. [Google Scholar] [CrossRef]
- Guo, S.; He, Y.; Shi, L.; Pan, S.; Xiao, R.; Tang, K.; Guo, P. Modeling and experimental evaluation of an improved amphibious robot with compact structure. Robot. Comput.-Integr. Manuf. 2018, 51, 37–52. [Google Scholar] [CrossRef]
- Li, M.; Guo, S.; Hirata, H.; Ishihara, H. A roller-skating/walking mode-based amphibious robot. Robot. Comput.-Integr. Manuf. 2017, 44, 17–29. [Google Scholar] [CrossRef]
- Lauder, G.V. Flight of the robofly. Nature 2001, 412, 688–689. [Google Scholar] [CrossRef]
- Chukewad, Y.M.; James, J.; Singh, A.; Fuller, S. RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion. arXiv 2020, arXiv:2001.02320. [Google Scholar] [CrossRef]
- Huang, C.; Liu, Y.; Wang, K.; Bai, B. Land–Air–Wall Cross-Domain Robot Based on Gecko Landing Bionic Behavior: System Design, Modeling, and Experiment. Appl. Sci. 2022, 12, 3988. [Google Scholar] [CrossRef]
- Meiri, N.; Zarrouk, D. Flying STAR, a Hybrid Crawling and Flying Sprawl Tuned Robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5302–5308. [Google Scholar]
- Cohen, A.; Zarrouk, D. The AmphiSTAR High Speed Amphibious Sprawl Tuned Robot: Design and Experiments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 6411–6418. [Google Scholar]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory tracking sliding mode control of underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar] [CrossRef]
- Liao, Y.; Zhang, M.; Wan, L.; Li, Y. Trajectory tracking control for underactuated unmanned surface vehicles with dynamic uncertainties. J. Cent. South Univ. 2016, 23, 370–378. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castaneda, H. Guidance and Control Based on Adaptive Sliding Mode Strategy for a USV Subject to Uncertainties. IEEE J. Ocean. Eng. 2021, 46, 1144–1154. [Google Scholar] [CrossRef]
- Guo, Y.; Yu, L.; Xu, J. Robust Finite-Time Trajectory Tracking Control of Wheeled Mobile Robots with Parametric Uncertainties and Disturbances. J. Syst. Sci. Complex. 2019, 32, 1358–1374. [Google Scholar] [CrossRef]
- Liu, K.; Gao, H.; Ji, H.; Hao, Z. Adaptive Sliding Mode Based Disturbance Attenuation Tracking Control for Wheeled Mobile Robots. Int. J. Control Autom. Syst. 2020, 18, 1288–1298. [Google Scholar] [CrossRef]
- Li, Z.; Yang, C.; Su, C.-Y.; Deng, J.; Zhang, W. Vision-Based Model Predictive Control for Steering of a Nonholonomic Mobile Robot. IEEE Trans. Control Syst. Technol. 2015, 24, 553–564. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, Y.; Ahn, C.K.; Cheng, J.; Chen, C. Adaptive Fuzzy Backstepping-Based Formation Control of Unmanned Surface Vehicles with Unknown Model Nonlinearity and Actuator Saturation. IEEE Trans. Veh. Technol. 2020, 69, 14749–14764. [Google Scholar] [CrossRef]
- Zhao, Y.; Qi, X.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M.A. Path Following Optimization for an Underactuated USV Using Smoothly-Convergent Deep Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6208–6220. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. An Intelligent Non-Integer PID Controller-Based Deep Reinforcement Learning: Implementation and Experimental Results. IEEE Trans. Ind. Electron. 2021, 68, 3609–3618. [Google Scholar] [CrossRef]
- Yang, H.; Guo, M.; Xia, Y.; Sun, Z. Dual closed-loop tracking control for wheeled mobile robots via active disturbance rejection control and model predictive control. Int. J. Robust Nonlinear Control 2020, 30, 80–99. [Google Scholar] [CrossRef]
- Li, X.; Ren, C.; Ma, S.; Zhu, X. Compensated model-free adaptive tracking control scheme for autonomous underwater vehicles via extended state observer. Ocean Eng. 2020, 217, 107976. [Google Scholar] [CrossRef]
- Guo, Y.; Qin, H.; Xu, B.; Han, Y.; Fan, Q.-Y.; Zhang, P. Composite learning adaptive sliding mode control for AUV target tracking. Neurocomputing. 2019, 351, 180–186. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Ali, N.; Tawiah, I.; Zhang, W. Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles. Ocean Eng. 2020, 218, 108179. [Google Scholar] [CrossRef]
- Liu, Y.-J.; Tong, S. Barrier Lyapunov Functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 2016, 64, 70–75. [Google Scholar] [CrossRef]
- Ames, A.D.; Coogan, S.; Egerstedt, M.; Notomista, G.; Sreenath, K.; Tabuada, P. Control Barrier Functions: Theory and Applications. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3420–3431. [Google Scholar]
- Li, L.; Dong, K.; Guo, G. Trajectory tracking control of underactuated surface vessel with full state constraints. Asian J. Control. 2021, 23, 1762–1771. [Google Scholar] [CrossRef]
- Cruz-Ortiz, D.; Chairez, I.; Poznyak, A. Non-singular terminal sliding-mode control for a manipulator robot using a barrier Lyapunov function. ISA Trans. 2021, 121, 268–283. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Gao, T.; Liu, Y.-J.; Tong, S.; Chen, C.L.P.; Ma, L. Time-varying IBLFs-based adaptive control of uncertain nonlinear systems with full state constraints. Automatica 2021, 129, 109595. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ding, F. Adaptive Safety Motion Control for Underactuated Hovercraft Using Improved Integral Barrier Lyapunov Function. Int. J. Control Autom. Syst. 2021, 19, 2784–2796. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles with Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Wang, N.; Ki Ahn, C. Hyperbolic-Tangent LOS Guidance-Based Finite-Time Path Following of Underactuated Marine Vehicles. IEEE Trans. Ind. Electron. 2020, 67, 8566–8575. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, C.; Li, T. Finite-time LOS Path Following of Unmanned Surface Vessels with Time-varying Sideslip Angles and Input Saturation. IEEEASME Trans. Mechatron. 2021, 27, 463–474. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths with Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S. Finite-time Extended State Observer Based Super-twisting Sliding Mode Controller for PMSM Drives with Inertia Identification. IEEE Trans. Transp. Electrif. 2021, 8, 1918–1929. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Attitude stabilization of rigid spacecraft with finite-time convergence: Attitude Stabilization of Rigid Spacecraft. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S. Control of state-constrained nonlinear systems using Integral Barrier Lyapunov Functionals. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; IEEE: Piscataway, NJ, USA, 2013; pp. 3239–3244. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, J.; Sun, W.; Zhang, B.; Wang, Z. Finite-time adaptive fuzzy control for nonlinear systems with full state constraints. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1–8. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Mass | kg | 6.5 |
| Max length | cm | 85 |
| Max width | cm | 55 |
| Height | cm | 75 |
| Max buoyancy | kg | 7.3 |
| Wheel radius | cm | 8 |
| Length of the axle | cm | 50 |
| Rotational inertia of Z-axis | kg·m2 | 0.108 |
| Performance Parameter | LOS | ELOS | ALOS | FLOS |
|---|---|---|---|---|
| 0–15 s, standard deviation ye (m) | 0.1843 | 0.1685 | 0.2306 | 0.16 |
| 0–15 s, max ye (m) | 0 | 0.018 | 0.2053 | 0 |
| Time (s) for ye < 0.01 m in 0–15 s | 4.35 | 4.00 | 8.49 | 3.72 |
| 15–28 s, standard deviation ye (m) | 0.1032 | 0.0473 | 0.1322 | 0.0264 |
| 15–28 s max ye (m) | 0.5164 | 0.1588 | 0.1154 | 0.3629 |
| Time(s) for ye < 0.01 m in 15–28 s | NAN | 4.4970 s | 7.404 | 2.784 |
| 0–15 s, time(s) to reach the ideal yaw angle of 0.785 rad | 6.3470 | 6.4910 | 10.6360 | 5.7662 |
| 15–28 s, time(s) to reach ideal yaw angle 1.031 rad | 7.270 | 6.1650 | 9.2110 | 4.9750 |
| 0–15 s, yaw angle overshoot 0.785 rad | 51.44% | 196.66% | 55.37% | 114.28% |
| 0–15 s, yaw angle overshoot 1.031 rad | 0.75% | 4.38% | 7.08% | 5.48% |
| Performance Parameter | FLOS | LOS | ALOS | ELOS |
|---|---|---|---|---|
| Standard deviation ye (m) | 0.2780 | 0.3193 | 0.3329 | 0.2942 |
| 0–15 s max ye (m) | 0 | 0 | 0.7443 | 0.3009 |
| 0–15 s ye convergence time (s), (ye < 0.01 m) | 4.2190 | 5.722 | 11.311 | 11.286 |
| 0–15 s heading angle planning time (s), (abs(ψe) < 0.05 rad) | 3.2380 | 4.4880 | 7.7780 | 6.8250 |
| 15–70 s ye average convergence time (s) | 2.3950 | 2.4200 | 3.2040 | 5.1020 |
| 15–70 s mean time (s) for heading angle planning, abs(ψe) < 0.05 rad | 4.1810 | 4.2340 | 6.9530 | 5.7670 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Liu, Y.; Huang, C.; Cheng, P. Water Surface and Ground Control of a Small Cross-Domain Robot Based on Fast Line-of-Sight Algorithm and Adaptive Sliding Mode Integral Barrier Control. Appl. Sci. 2022, 12, 5935. https://0-doi-org.brum.beds.ac.uk/10.3390/app12125935
Wang K, Liu Y, Huang C, Cheng P. Water Surface and Ground Control of a Small Cross-Domain Robot Based on Fast Line-of-Sight Algorithm and Adaptive Sliding Mode Integral Barrier Control. Applied Sciences. 2022; 12(12):5935. https://0-doi-org.brum.beds.ac.uk/10.3390/app12125935
Chicago/Turabian StyleWang, Ke, Yong Liu, Chengwei Huang, and Peng Cheng. 2022. "Water Surface and Ground Control of a Small Cross-Domain Robot Based on Fast Line-of-Sight Algorithm and Adaptive Sliding Mode Integral Barrier Control" Applied Sciences 12, no. 12: 5935. https://0-doi-org.brum.beds.ac.uk/10.3390/app12125935