1. Introduction
Offshore structures arrange immense potentials for the progress and utilization of oceanic energy and resources. Offshore industrializations are moving rapidly towards deep seawaters for oil and gas exploration in oceanic environments to meet global energy demands. Typically, these constructed structures are subjected to more severe load conditions than those seen on land. The main source of structural load pressure for soil foundations is the ocean waves affecting the platform. In addition to the conditions and situations that often occur in inland structures, offshore structures have additional complications due to their location in the marine environment, where hydrodynamic interactions and dynamic reactions are essential considerations in their design. An offshore structure based on mobility can be of two types: offshore fixed structures and offshore floating structures. In shallow waters, both fixed types of offshore-based structures (gravity and jacketed platforms) are cost-effective and practical. Using fixed platforms, mainly in deep water (nearly 300 m deep), is vulnerable to technical complications linked to economic issues that increase rapidly as the water depth increases. Contrarily, compatible floating structures such as tension leg platforms and spar platforms provide an economical solution to exploration and production facilities in profound and ultra-deep water [
1].
Most floating-on-water-based offshore structures are largely ostentatious by certain uncertainties primarily related to steep and nonlinear waves, wind, and currents, which cause the ringing and springing of tension leg platforms (TLPs), slow the drift-yaw motion of floating production, storage, and offloading (FPSO), and significant oscillations in spar platforms due to vortex shedding [
2].
Due to non-linearities such as geometry, changeable pretension, and varying immersion, investigating floating offshore constructions such as spar platforms and evaluating their environmental impact is difficult. Spar platforms are the most suitable and economical offshore floating structures suitable for deep-sea waters. In the exploration phase of oil and gas drilling operations, several environmental and associated forces often affect offshore floating structures. An early decision should be made to either delay or stop production based on the prediction of the spar platform’s response to several anticipated environmental situations.
The finite element method (FEM) can be considered a key practice for dealing with such analysis. Several recent studies have been conducted to forecast and predict the responses of spar types of platforms using several conventional methods [
3,
4,
5,
6]. However, utilizing such methodologies to analyze the reaction of spar platforms is time-consuming and difficult.
Artificial neural networks (ANNs) are cutting-edge algorithms that can deliver very quick and efficient results in instances where a traditional analysis would be quite difficult. Hence, Simoes et al. [
7] developed an ANN model to predict the mooring forces and analyze the dynamic behavior of guard tent and FPSO in a tandem configuration. It is of great importance to monitor the integrity of the mooring lines [
8] on floating offshore platforms in order to detect any damage or failures. To address the problem, Sidarta et al. [
9] exploited an ANN model for mooring line damage detection based on a proprietary methodology that only uses GPS tracking to detect tiny fluctuations in the long drift period of a moored floating vessel as a signal of mooring line failure. ANN was applied by Yee et al. [
10] for the purpose of monitoring the health of a floating offshore structure’s mooring line. Two machine learning models, a gradient-boosted regression tree (GBRT) and an artificial neural network (ANN), were used to forecast offshore platform risk assessments [
11]. In other work, Uddin et al. [
12] predicted the top tension response of the spar mooring lines using an ANN for a long-time history. This style was appropriate for averting ship strikes and maintaining the mooring line.
Response-based hydrodynamic models (SAMERS) were suggested by Mazaheri et al. to predict the excursion and mooring power of the FPSO over a lifetime of year N [
13,
14]. They computed the responses from an offshore floating-based platform exposed to arbitrary waves, current loads, and wind. Hybrid versions of the ANN-FEM technique have been implemented by Guarize et al. [
15] for a long-term time-based history to predict the retort of the FPSO and for the indiscriminate dynamic-based response of ladder tubes as well as for mooring lines.
Pina et al. [
16] have developed an ANN-based surrogate model for predicting the response of offshore structures. They used FEM instead of dynamic analysis. The authors employed the line tension of FPSO to find the test model, and the results demonstrated that ANN is highly successful in precisely and swiftly anticipating responses. Moghim et al. [
17], Shafiefar et al. [
18], Shafiefar and Moghim [
19], and Zhou and Luan [
20] used ANNs to forecast the hydrodynamic forces caused by waves and currents on thin cylinders.
With an ANN-based technique, the current study proposes a nonlinear prediction of spar platform responses under numerous environmental-related factors, such as the wave period and wave height. By using entirely new environmental forces as inputs for the ANN, it was found that the response of the spar platform time history could be predicted more accurately. The findings demonstrate that the ANN technique is proficient and can ominously shorten the computation time required to predict response time histories.
2. Materials and Methods
2.1. Finite Element Modelling and Analysis
To implement pairs of completely integrated spar hulls and mooring lines that are coupled under wave loading, a finite element model (FEM) was used. The spar platform analysis considers the actual physical connection between a vertical rigid floating hull and a mooring line. Such a unique model can capture all different types of loading, nonlinearities, and boundary conditions [
21]. Thus, the integrated binding consequence used in this study was examined to demonstrate the drag damping importance in mooring systems under deep water conditions. The FEM code AQUA/ABAQUS was utilized to find the responses of the spar types of the platform.
The primary purposes of this research are to achieve the right catenary shape of the mooring line under gravity (self-weight), stiffness, and axial tension, all of which are related to its mean curvature. This equilibrium state is obtained conclusively when the spar cylinder is gently released under buoyancy. This dynamic analysis was performed under normal seawater circumstances.
A decoupled quasi-static method that totally or partially ignores the influences of the interaction between the platforms and mooring lines is the most commonly used strategy for handling the dynamics of a spar platform. In this technique, the mooring lines are used to model as massless linear or nonlinear springs. For the mooring line responses, the platform motions are applied in a comprehensive finite element model of the catenary mooring line as an external loading with regard to the imposed boundary conditions. Hence, the dynamic interactions between mooring lines and platforms are not appropriately modelled in the uncoupled conventional analysis [
22]. For platforms in deeper waters, moorings often contribute to considerable damping and inertia due to their longer length, greater weight, and greater dimensions. These damping values must be taken into account in order to provide an appropriate motion analysis of a platform in deep waters.
2.1.1. Modeling of the Spar Platform
The installation of a spar platform at a depth of 1018 m was selected for this study. The spar platform is mainly made up of three parts: spar hulls, a riser, and mooring lines. The geotechnical and mechanical characteristics of the mooring system are listed in
Table 1.
Table 2 also shows the hydrodynamic characteristics and properties of the marine environment.
In the vertical guiding position, the spar hull was depicted as a rigid beam with a mooring line securing it to the bottom. The riser’s reaction point was attached to the riser. Six springs were used to connect the hard spar platform to the flexible mooring lines (three for translations such as surge, heave, and sway and three for rotations such as pitch, roll, and yaw). The translation spring had a relatively high individual stiffness, but the rotation spring had a relatively low stiffness, approximating a hinge connection.
The relevant mooring line was designed to cover all sorts of significant non-linearity, including low deformation and variable deformation non-linearity. The mooring line was developed using the hybrid beam element. It has been called a hybrid system since the situation uses two shape functions to preserve the catenary shape of every mooring line: one to simulate elastic behavior and the other to simulate axial tension. For simplicity of convergence, other elements such as linear or nonlinear truss elements can be explored in addition to the hybrid beam element.
For modeling purposes, the seabed was treated as a rigid plate. The mooring line was in contact with the seafloor but did not penetrate it. This interface was modeled as a frictionless surface-to-surface contact. For contact interaction, the surfaces around the mooring lines and the seabed surfaces were chosen. For the final pieces, the integrated spar hulls and mooring lines were simulated in the ABAQUS code, as illustrated in
Figure 1.
2.1.2. Response Analysis of Spar Platform
In our current investigation, a completely coupled analysis of the mooring line and spar hull was performed as a single and integrated prototype. At each phase, this tactic maintained a dynamic steadiness among the forces operating on the mooring lines and spar hull. This accurately depicted the damping and showed the genuine behavior of the spar hull and mooring line arrangement. A completely integrated analysis method was used to determine the ability to forecast the platform’s response more correctly. The structural behavior of the spar platform was examined after it was simulated and studied under hydrodynamic loadings.
The wave data were considered when analyzing responses in Morrison’s regime, and it was assumed that these measures provided statistical stability in the structure and accuracy in the solutions for short periods [
23]. The results of the response analysis of the platform and the detailed responses of the mooring lines are presented. Dynamic and static loads were applied depending on the analysis. The model automatically incorporated the stress and stiffness related with the mean curvature. Hence, it was an accurate approach. The wave loading of the mooring line was carried out at each stage.
2.2. Artificial Neural Network
An ANN was employed to develop models to predict the response of the spar platform. The reaction of the spar platform was anticipated using the ANN model, and the wave period and height were obtained. Prior to that, the wave period and height were anticipated by means of forecasting the wind speed and the ANN model. The ANN model was developed in this study considering a nonlinear autoregressive network model (NARX) to predict the wave period and wave height. The NARX is a dynamic recurrent neural network model with many layers involving feedback connections. The NARX model can be expressed mathematically as follows:
where
F(.) is the nonlinear function assessed by a multi-layer perceptron,
x(
t −
n) and
y(
t −
n) are the input and output of the network at the time (
t −
n), respectively, and
n is the input delay. The trained network can predict output
y(
t) based on the input values.
The NARX network contains five neurons in the hidden layer with an activation function and two-step delays for both the input and the output. The Levenberg–Marquardt backpropagation [
24,
25] algorithm helps to obtain the minimum mean square error (MSE) between the target and output by adjusting the weights and bias. In total, 1460 data samples were collected, of which 992 were used for training, 234 were used for validation, and 234 were used for testing. The NARX network was trained and predicted the wave height and wave period from randomly selected wind forces.
The obtained wave height and wave period, along with the geometrical and mechanical properties (
Table 1) and hydrodynamic properties (
Table 2), were used as inputs for the response prediction of the spar platform using an ANN. A feed-forward backpropagation neural network was used to develop the ANN model for the prediction responses such as the heave, surge, and pitch of spar hulls and the top tension of the mooring line. The ANN architecture primarily consists of input, output, and hidden layers. The ANN architecture may be expressed mathematically as
where
is the value of the input at time
t;
i is the number of inputs;
is the value of the output, which consists of responses at time
t;
j is the number of output data;
is the weight that is multiplied with the input;
b is the bias; and
φ is the activation function.
The activation function can be utilized via a hyperbolic tangent sigmoid transfer function that can be expressed as
The hidden layer contains 20 neurons with a transfer function in the ANN and the output layer with a purely linear function type of activation function. When the ANN results differed from the anticipated output response, the Levenberg–Marquardt backpropagation was employed to reduce error. The weights were determined using the gradient optimization method, and the ANN network was created using the trial-and-error method. The effectiveness and efficiency of the network were then measured using MSE. In order to observe the ANN performance, the root-mean-square errors (RMSE), correlation coefficient (R), and bias were calculated using the following expressions:
where
is the target value at the
ith step,
is the predicted value at the same step,
n is the number of increments,
is the average target, and
is the average of the predicted values.
The time history data that contain 3000 s responses (i.e., surge, heave, pitch, and top tension) of the spar platform obtained from FEM were used as the target in the ANN. The data were randomly divided into three groups: 70% for training, 15% for validation, and 15% for testing. Before training the ANN, the input and target data were normalized within the range of −1 to 1 using the following equation:
where
xmin and
xmax are the minimum and maximum values of input and target, and
a and
b are the scaling factors. The network was trained by the iterative process, and it stopped when the error variation was too small.
3. Results
3.1. Prediction of Wave
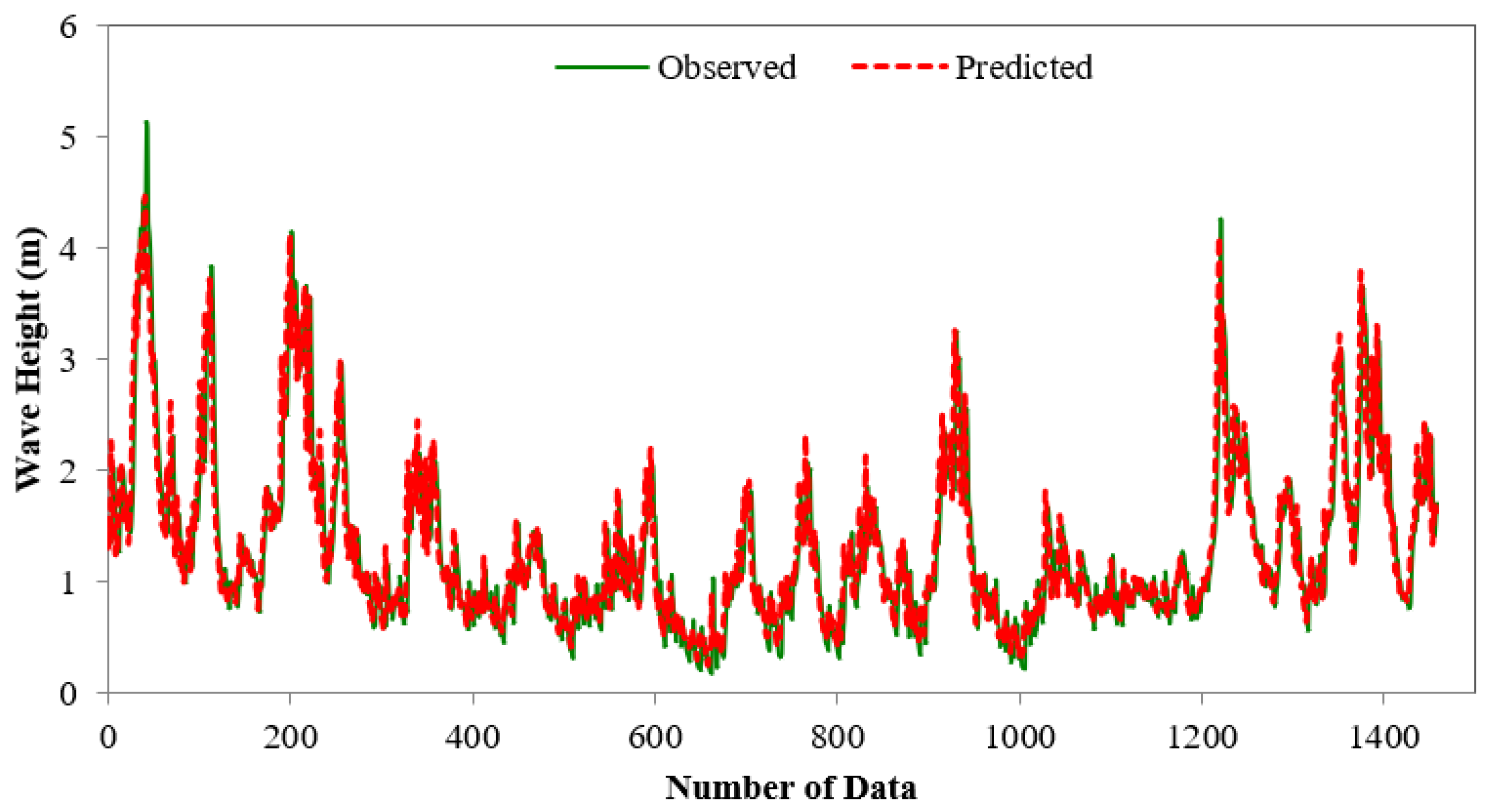
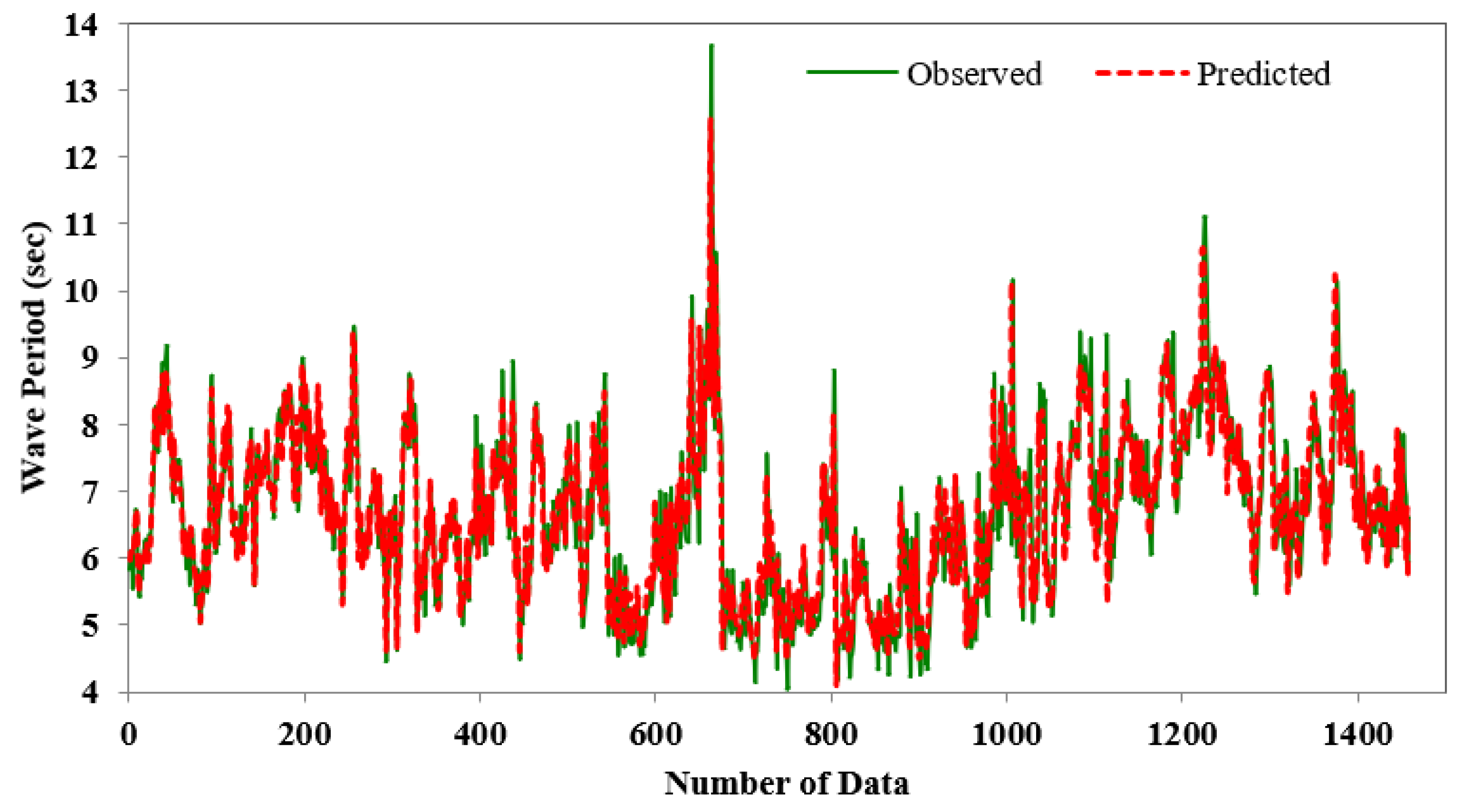
The NARX neural network model was used to forecast the wave height and period based on a random wind force. Because the gradient of the performance function tended to be zero, the ANN network training was terminated after 436 training epochs. The performance of the NARX neural network model was evaluated by comparing the predicted results with the observed data for the wave height and wave period (
Figure 2 and
Figure 3, respectively).
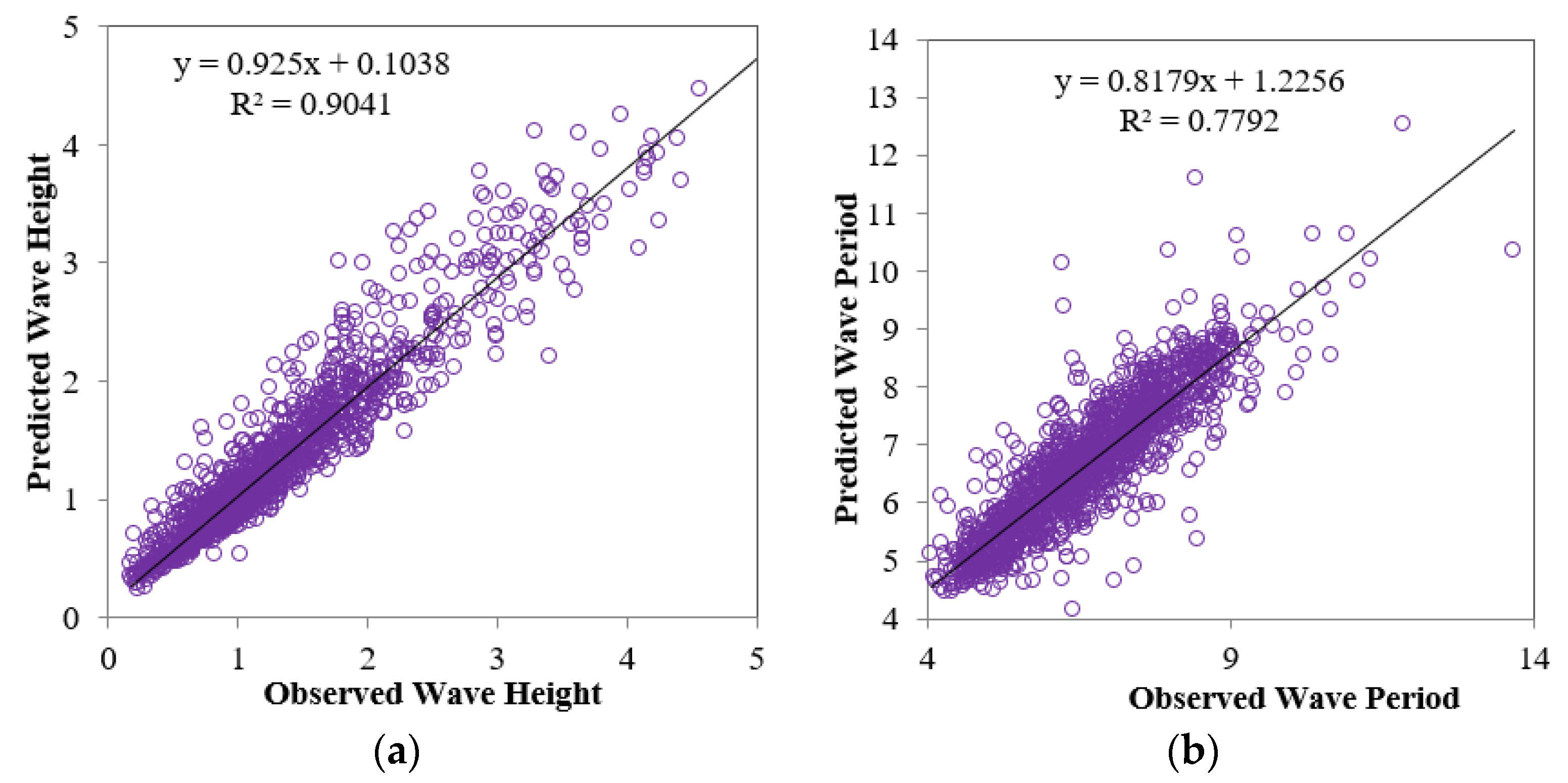
Figure 4a,b compares the observed data and the results predicted by the ANN model of wave period and wave height for the training results. Here, the ANN model’s predicted results and observed values are plotted with corresponding trend lines. In the ANN model, the overall prediction accuracies were discovered to be good.
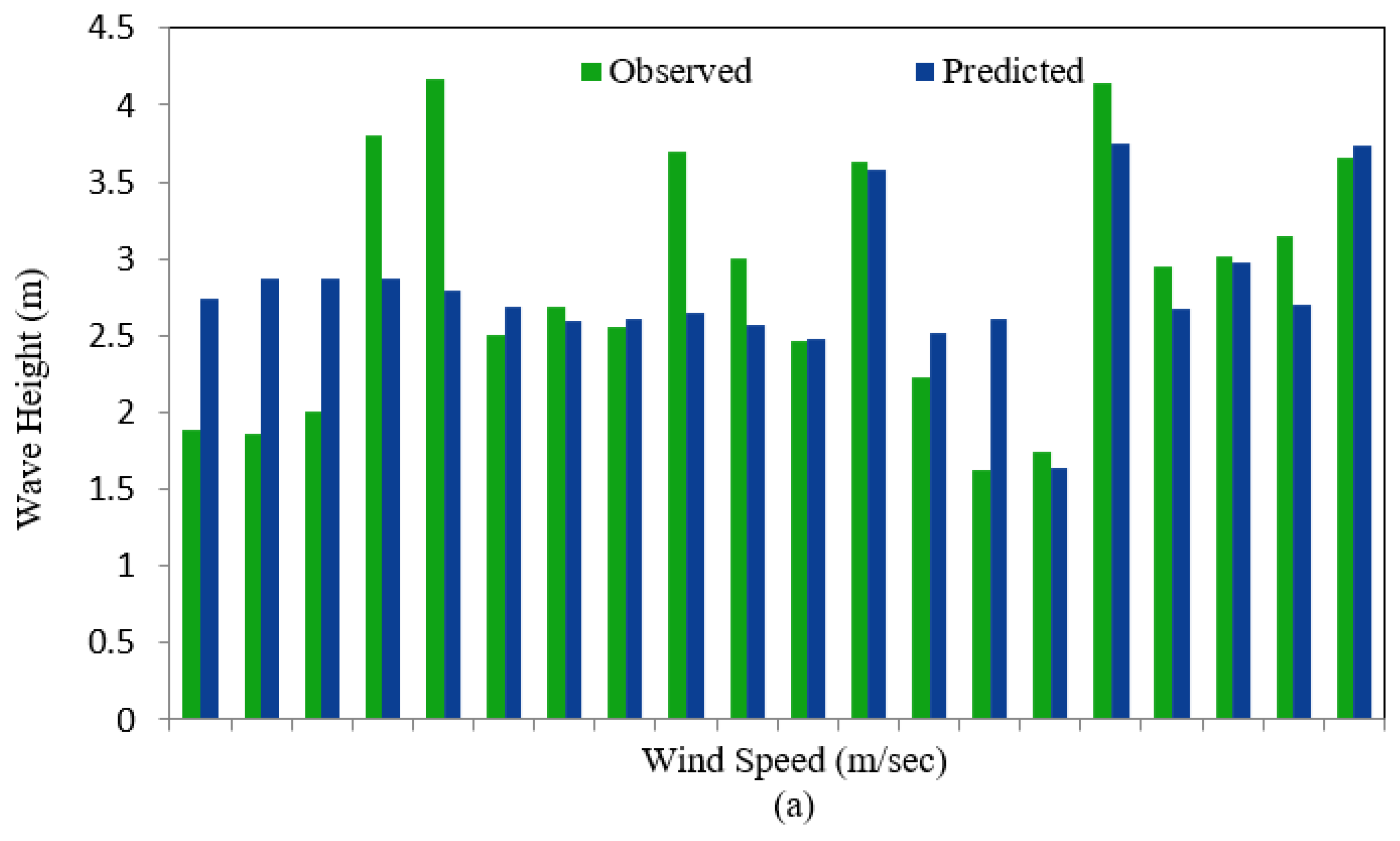
The predictions of wave period and wave height, using a randomly chosen wind force as the input, along with the observed data for testing, are shown in
Figure 5a,b, respectively. Despite modest changes in the observed and anticipated wave height and length due to the new randomly picked wind force, the ANN model’s overall performance was good.
3.2. Surge Response
The FEM model’s predictions of the surge response of the spar hull for an 11.39 s wave period and a 12.65 m wave height were contemplated to validate the ANN model in the current study.
Figure 6 shows the surge responses of the spar hull from the training data of the ANN model results alongside the FEM results. The expected responses of the network outcome align with the FEM results.
The statistics of the surge response of the spar platform predicted by ANN and FEM for a wave height of 12.65 m and wave period of 11.39 s for the training results are shown in
Table 3. The ANN model was used to predict the surge response based on newly chosen environmental forces and a mechanical parameter (
Figure 7). A 3000 s time history of surge response was predicted by the ANN model for a wave height of 9.65 m and a wave period of 10.10 s.
3.3. Heave Response
The prediction of the heave response of the spar hull using the ANN model was compared with the FEM results for a wave height of 9.65 m and a 9.94 s wave period (
Figure 8). The figure shows that the training data of the ANN model results follow the same trends as the FEM results.
The statistical heave responses for a wave height of 9.65 m and a wave period of 9.94 s are reported in
Table 4, as predicted by both the ANN and FEM approaches. The results show that the ANN approach is suitable for predicting the heave response.
The performance of the ANN approach was assessed by the heave response predictions of a spar platform using newly selected environmental force and mechanical parameters and comparing these predictions with the FEM results (
Figure 9). The 3000 s heave response time history was predicted for a wave height of 6.65 m and a wave period of 8.25 s. The heave response oscillated about the mean location, alternating between smaller and greater amplitudes and repeating the same trend over time. The fluctuations narrowed by around 20% as they progressed from wide to narrow.
3.4. Pitch Response
The ANN model was used to validate the pitch response results and FEM results for a wave height of 9.65 m and a wave period of 9.94 s.
Figure 10 presents the convergence of the predicted values from the ANN training data and the FEM response of the spar hull. As shown, the outcomes forecasted by the ANN model results and the FEM results follow similar trends.
Table 5 displays the ANN’s statistical pitch response and the FEM results for a wave height of 9.65 m and a period of 9.94 s. The results of the ANN technique indicate accurate pitch response predictions.
The average prediction error was less for the prediction of the pitch response of the spar hull based on the newly chosen mechanical parameters and environmental forces (
Figure 11). The response for a time history of 3000 s, wave height of 12.65 m, and wave period of 11.39 s was predicted by the ANN, and the outcomes were compared with the FEM model results. The pitch response exhibited a peak value of 0.8 rad.
3.5. Maximum Mooring Tension Response
The maximum mooring response was predicted by the ANN model using training data; the results were then compared with the FEM model’s results (
Figure 12). The prediction of the top tension responses of the spar platform was obtained by considering a wave height of 12.65 m and a wave period of 11.39 s. The ANN model’s predictions aligned with the FEM findings.
Table 6 presents the statistical analysis of the mooring line tension response of the spar platform concerning the FEM and ANN results. The results of the ANN model are suitable for predicting the top tension response in terms of newly chosen mechanical parameters and environmental forces (
Figure 13). The top tension response for the 3000 s time history was predicted by the ANN model and compared with the FEM model results for a wave height of 11.30 m and a wave period of 14.15 s.
4. Discussion
The performance of the artificial neural network (ANN) model was evaluated primarily using three parameters: root-mean-square errors (RMSE), the coefficient of correlation (
R), and bias (
Table 7). The statistical parameters were analyzed from the network-predicted results and the target for the training data. The ANN results exhibited good performance for predicting the wave height and wave period, as revealed by the high correlation coefficient values of 0.996 and 0.989, respectively.
The artificial neural network (ANN) model’s predictions were compared to the observed values of wave height and wave period. It was critical to train the network so that the series-parallel configuration errors were relatively tiny for the model to be effective in parallel response (iterated prediction). The greatest prediction error was less than ±1 per cent, and this model can estimate wave height and period based on randomly selected wind forces.
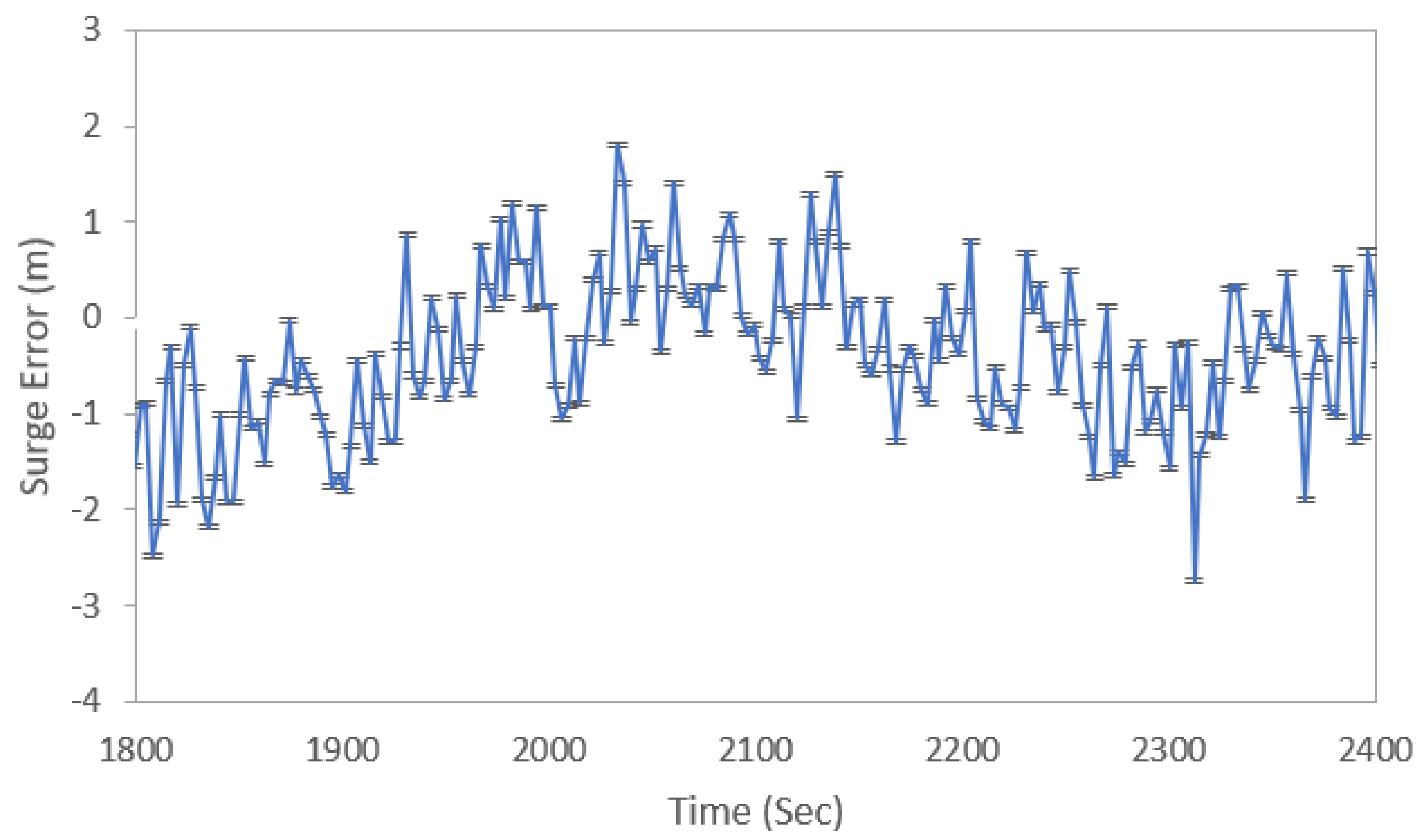
The relative comparison between the ANN and FEM models’ results for surge response error is shown in
Figure 14. The ANN model’s overall performance was obtained to be reliable for predicting surge responses.
Figure 15 shows the standard error bar of heave responses between the ANN model and FEM results for the 9.65 m wave height and 9.94 s wavelength. The ANN model’s response predictions were very accurate.
The pitch response error obtained by the difference of predicted responses by ANN and FEM is depicted in
Figure 16. The overall prediction performance of the neural network was decent.
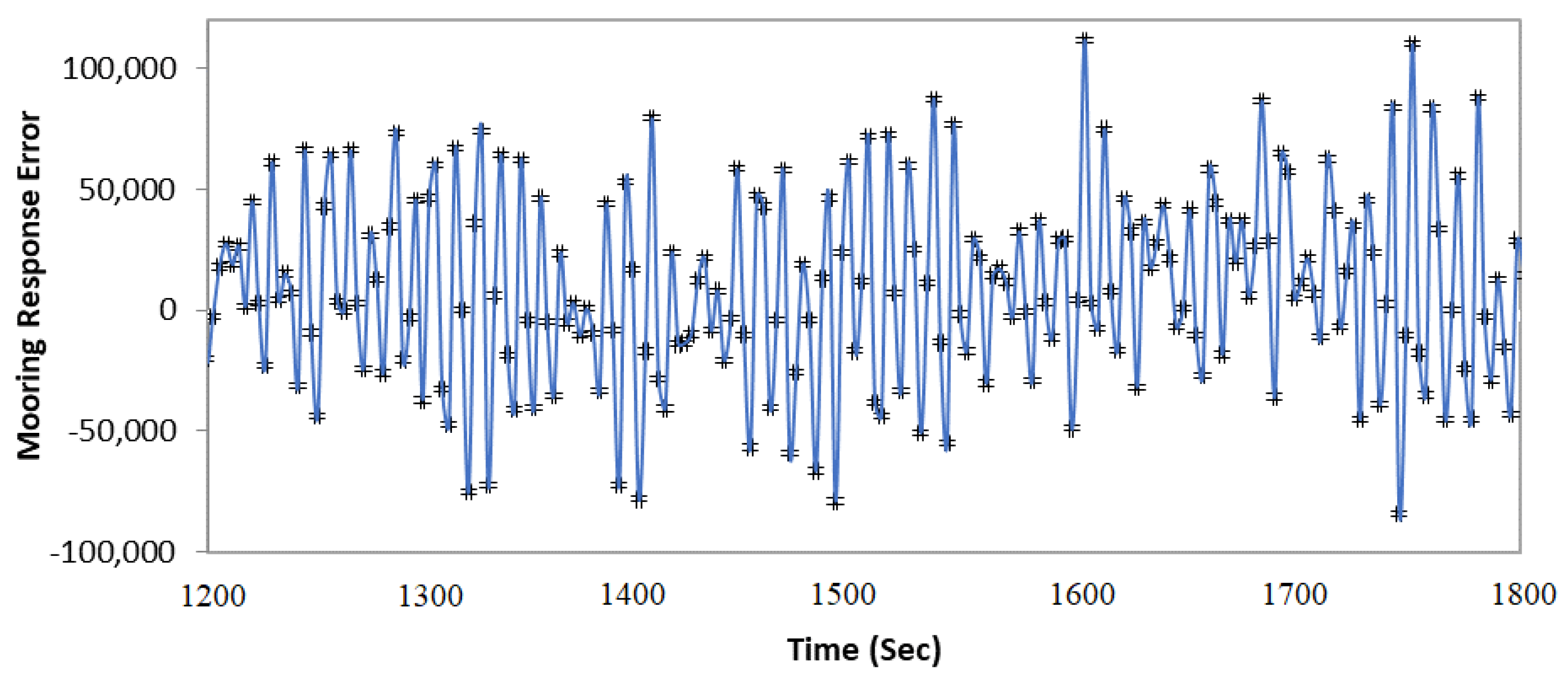
The maximum mooring line tension response error was calculated based on the difference between the FEM results and ANN results (
Figure 17). The predicted FEM and ANN results were plotted for a wave height of 12.65 m and a wave period of 11.39 s.
The performance of the ANN model was assessed based on how much the predicted responses differed from the obtained FEM results and generated errors. As shown in
Table 8, the correlation coefficient (R) and root-mean-square error (RMSE) reflect the network’s error function and prediction abilities, respectively.
Based on the above discussion, the ANN model can predict the surge, pitch, and heave response of a spar hull and the maximum mooring line response using untrained wave height and wave period data as well as structural parameters. It has been observed that the ANN model is highly efficient and considerably reduces the time needed to predict response time histories of spars and mooring lines. The responses of the spar platform predicted by the ANN model correlate well with the FEM results. However, an ANN model that has already been trained and formed the networks for a spar platform cannot predict the response for other different types of platforms.
5. Conclusions
Using newly chosen wave periods and wave heights, an ANN model was used to anticipate the responses of a spar platform. Based on structural and environmental limitations and parameters, this attempt forecasted the heave, surge, and pitch response of a spar hull as well as the top tension of mooring lines.
The ANN model remains effective and can significantly reduce the prediction time of spar hull and mooring line response time histories.
The spar platform responses predicted by the ANN technique align with FEM-derived outcomes.
The required time to calculate the response of a spar platform by means of the ANN technique is 10 s with 4.0 GB of RAM (i3-2100 CPU @ 3.10 GHz) on a normal desktop PC, while the FEM model on a Dell Workstation (Intel Xeon E5620 @ 2.40 GHz and 8 GB of RAM) takes 23 h. Rapid forecasting using the ANN will assist in making decisions related to whether to stop or continue oil and gas production in the event of adverse weather conditions. Furthermore, the practice of ANN does not necessarily require the on-site attendance of a skilled technical person to obtain the platform responses.
The accuracy of predicting the spar platform responses within the range of the training data was 90.0%.
The accuracy of predicting responses outside the range of the training data was 85.35%. Thus, accurate results can be obtained if more data are used for training.
An artificial neural network (ANN) can be used to monitor the responses of spar platforms in the face of extreme storms, unintentional collisions with supply vessels, and more. For safety analysis and design, an ANN can be employed to investigate the reliability of the spar platform.
Author Contributions
Conceptualization, M.A.U. and M.J.; methodology, M.A.U. and M.J.; software, M.A.U; validation, M.A.U. and M.J.; formal analysis, M.A.U. and M.J.; investigation, M.A.U., M.T.R.B. and M.J.; resources, M.A.U., M.T.R.B. and M.J.; data curation, M.A.U. and M.J.; writing—original draft preparation, M.A.U., M.A. and M.J.; writing—review and editing, M.A.U., M.T.R.B. and M.J.; visualization, M.A.U. and M.A.; supervision, M.A. and M.T.R.B.; project administration, M.A. and M.J; funding acquisition, M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financially supported by the Deanship of Scientific Research (Ambitious Research Track) in the King Faisal University, Saudi Arabia, grant number: GRANT329. And the APC also funded by the same grant.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from Md. Alhaz Uddin, upon reasonable request.
Acknowledgments
The authors extend their appreciation to the Deanship of Scientific Research (DSR) at King Faisal University (KFU) for funding this work through research grant number GRANT329.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ng, V.; Kurian, O.A.; Montasir, A. Experimental and Analytical Investigation of Classic Spar Responses. In Proceedings of the International Conference on Sustainable Building and Infrastructure, UTP Institutional Repository, Kuala Lumpur, Malaysia, 3–4 March 2010. [Google Scholar]
- Kim, C.H. Nonlinear Waves and Offshore Structures; World Scientific Publishing Company: Hackensack, NJ, USA, 2008. [Google Scholar]
- Prislin, I.; Steen, A.; Halkyard, J. Upending of a Spar Offshore Platform: Prediction of Motions and Loading. In Proceedings of the Eleventh International Offshore and Polar Enghleering Conference, The International Society of Offshore and Polar Engineers, Stavanger, Norway, 17–22 June 2001; pp. 421–426. [Google Scholar]
- Steen, A.; Kim, M.H.; Irani, M. Prediction of Spar Response: Model Tests vs Analysis. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 2004; pp. 1–11. [Google Scholar]
- Montasir, O.A.A.; Kurian, V.J.; Narayanan, S.P.; Mubarak, M.A.W. Dynamic Response of Spar Platforms Subjected to Waves and Current. In Proceedings of the International Conference on Construction and Building Technology, Kuala Lumpur, Malaysia, 17–20 June 2008. [Google Scholar]
- Liu, W.; Zhong, Y. Prediction of Floating Platform Mooring Responses in South China Sea. In Proceedings of the Twenty-first International Offshore and Polar Engineering Conference, The International Society of Offshore and Polar Engineers (ISOPE), Maui, HI, USA, 19–24 June 2011; pp. 170–175. [Google Scholar]
- Simoes, G.; Tiquilloca, L.M.; Morishita, M. Neural-network-based prediction of mooring forces in floating production storage and offloading systems, Industry Applications. IEEE Trans. 2002, 38, 457–466. [Google Scholar]
- FBjørni, A.; Lien, S.; Midtgarden, T.A.; Kulia, G.; Verma, A.; Jiang, Z. Prediction of dynamic mooring responses of a floating wind turbine using an artificial neural network. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1201, 12023. [Google Scholar] [CrossRef]
- Sidarta, D.E.; O’Sullivan, J.; Lim, H.J. Damage Detection of Offshore Platform Mooring Line Using Artificial Neural Network. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Yee, X.E.; Mohamed, M.A.W.; Montasir, O.A. Application of Artificial Neural Network on Health Monitoring of Offshore Mooring System. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1144, 12035. [Google Scholar]
- Dyer, A.S.; Zaengle, D.; Nelson, J.R.; Duran, R.; Wenzlick, M.; Wingo, P.C.; Bauer, J.R.; Rose, K.; Romeo, L. Applied machine learning model comparison: Predicting offshore platform integrity with gradient boosting algorithms and neural networks. Mar. Struct. 2022, 83, 103152. [Google Scholar] [CrossRef]
- Uddin, M.A.; Jameel, M.; Razak, H.; Islam, A. Response Prediction of Offshore Floating Structure Using Artificial Neural Network. Adv. Sci. Lett. 2012, 14, 186–189. [Google Scholar] [CrossRef]
- Mazaheri, S.; Downie, M.J. Response-based method for determining the extreme behaviour of floating offshore platforms. Ocean. Eng. 2005, 32, 363–393. [Google Scholar] [CrossRef]
- Mazaheri, S. The usage of artificial neural networks in hydrodynamic analysis of floating offshore platforms. J. Mar. Eng. 2006, 3, 48–60. [Google Scholar]
- Guarize, R.; Matos, N.A.F.; Sagrilo, L.V.S.; Lima, E.C.P. Neural networks in the dynamic response analysis of slender marine structures. Appl. Ocean. Res. 2007, 29, 191–198. [Google Scholar] [CrossRef]
- Pina, A.A.D.; Pina, A.C.D.; Albrecht, C.H.; Lima, B.S.L.P.D.; Jacob, B.P. Applying Computational Intelligence in the Design of Moored Floating Systems for Offshore Oil Production. In Proceedings of the 2nd International Conference on Engineering Optimization, Lisbon, Portugal, 6–9 September 2010. [Google Scholar]
- Alhodairy, Y.S.; Sadeghi, K. Application of artificial neural network to predict the wave characteristics to improve the sea waves and currents forces applied on the jacket platform legs. J. Pure Appl. Sci. 2019, 18, 4. [Google Scholar]
- Shafiefar, M.; Ardeshir, B.; Moghim, M.N. Prediction of wave and current forces on slender structures using artificial neuralnetworks. Trans. Hong Kong Inst. Eng. 2011, 18, 30–35. [Google Scholar]
- Shafiefar, M.; Moghim, M.N. Prediction of Wave and Current Forces on Slender Structures in the Form of Time Series Using Artificial Neural Networks. Int. J. Marit. Technol. 2005, 2, 13–24. [Google Scholar]
- Zhou, X.; Luan, S. Study on wave impact force prediction of different shore connecting structure based on improved BP neural network. In Proceedings of the 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 26–29 September 2009; pp. 1–4. [Google Scholar]
- Jameel, M. Non-Linear Dynamic Analysis and Reliability Assessment of Deepwater Floating Structure; Indian Institute of Technology: New Delhi, India, 2008. [Google Scholar]
- Montasir, O.A.; Yenduri, A.; Kurian, V.J. Mooring System Optimisation and Effect of Different Line Design Variables on Motions of Truss Spar Platforms in Intact and Damaged Conditions. China Ocean. Eng. 2019, 33, 385–397. [Google Scholar] [CrossRef]
- Jameel, M.; Ahmad, S.; Islam, A.; Jumaat, M.Z. Nonlinear Analysis of Fully Coupled Integrated Spar-Mooring Line System. In Proceedings of the International Offshore and Polar Engineering Conference (ISOPE), Maui, HI, USA, 19–24 June 2011; pp. 198–205. [Google Scholar]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H. Neural Network Design; PWS Publishing: Boston, MA, USA, 1996. [Google Scholar]
- Hagan, M.T.; Menhaj, M. Training Feed-forward Networks with the Marquardt Algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Two-dimensional finite element model of the spar platform in ABAQUS.
Figure 1.
Two-dimensional finite element model of the spar platform in ABAQUS.
Figure 2.
Comparison of ANN results and observed data of wave height for the training results.
Figure 2.
Comparison of ANN results and observed data of wave height for the training results.
Figure 3.
Comparison of ANN results and observed data of wave period for the training results.
Figure 3.
Comparison of ANN results and observed data of wave period for the training results.
Figure 4.
Comparison between the observed and predicted results for the training results of (a) wave height and (b) wave period.
Figure 4.
Comparison between the observed and predicted results for the training results of (a) wave height and (b) wave period.
Figure 5.
Variation in observed and predicted (a) wave height and (b) wave period from randomly chosen wind force.
Figure 5.
Variation in observed and predicted (a) wave height and (b) wave period from randomly chosen wind force.
Figure 6.
The surge response time history predicted by the training data of the ANN and FEM results for 11.39 s wave period and 12.65 m wave height.
Figure 6.
The surge response time history predicted by the training data of the ANN and FEM results for 11.39 s wave period and 12.65 m wave height.
Figure 7.
Surge response time history predicted for wave height of 9.65 m and wave period of 10.10 s.
Figure 7.
Surge response time history predicted for wave height of 9.65 m and wave period of 10.10 s.
Figure 8.
The heave response time history predicted by the training data of ANN and FEM results for wave height of 9.65 m and wave period of 9.94 s.
Figure 8.
The heave response time history predicted by the training data of ANN and FEM results for wave height of 9.65 m and wave period of 9.94 s.
Figure 9.
Heave response time history predicted for wave height of 6.65 m and wave period of 8.25 s.
Figure 9.
Heave response time history predicted for wave height of 6.65 m and wave period of 8.25 s.
Figure 10.
The pitch response time history predicted by the training data of ANN and FEM results for wave height of 9.65 m) and the wave period of 9.94 s.
Figure 10.
The pitch response time history predicted by the training data of ANN and FEM results for wave height of 9.65 m) and the wave period of 9.94 s.
Figure 11.
Pitch response time history predicted for wave height of 12.65 m and wave period of 11.39 s.
Figure 11.
Pitch response time history predicted for wave height of 12.65 m and wave period of 11.39 s.
Figure 12.
Mooring line tension response predicted using training data by ANN and FEM models for 12.65 m wave height and 11.39 s wave period.
Figure 12.
Mooring line tension response predicted using training data by ANN and FEM models for 12.65 m wave height and 11.39 s wave period.
Figure 13.
Top tension response time history predicted for 14.15 s wave period and 11.30 m wave height.
Figure 13.
Top tension response time history predicted for 14.15 s wave period and 11.30 m wave height.
Figure 14.
Surge response error between ANN and FEM model results for wave height of 12.65 m and wave period of 11.39 s.
Figure 14.
Surge response error between ANN and FEM model results for wave height of 12.65 m and wave period of 11.39 s.
Figure 15.
Heave response error between ANN and FEM model results for wave height of 9.65 m and the wave period of 9.94 s.
Figure 15.
Heave response error between ANN and FEM model results for wave height of 9.65 m and the wave period of 9.94 s.
Figure 16.
Pitch response error between ANN and FEM model results for wave height of 9.65 m and wave period of 9.94 s.
Figure 16.
Pitch response error between ANN and FEM model results for wave height of 9.65 m and wave period of 9.94 s.
Figure 17.
The mooring line response error between ANN and FEM for 12.65 m wave height and 11.39 s wave period.
Figure 17.
The mooring line response error between ANN and FEM for 12.65 m wave height and 11.39 s wave period.
Table 1.
Geometrical and mechanical properties of moorings and spar hull.
Table 1.
Geometrical and mechanical properties of moorings and spar hull.
| Description | Value | Unit |
|---|
| Sea-bed size | 5000 × 5000 | m2 |
| Spar (Classic JIP Spar) | Length | 213.044 | m |
| Diameter | 40.54 | m |
| Draft | 198.12 | m |
| Mass | 2.515276 × 108 | kg |
| Mooring Point | 106.62 | m |
| No. of Nodes | 17 | |
| No. of Elements | 16 | |
| Type of Element | Rigid beam element | |
| Depth of Water | 1018 | m |
| Mooring | No. of Moorings | 4 | |
| Length | 2000.0 | m |
| Stiffness (EA) | 1.50 × 109 | N |
| Mass | 1100 | Kg/m |
| Mooring line pretension | 1.625 × 107 | N |
| No. of Nodes | 101 | |
| Element Type | Hybrid beam element | |
Table 2.
Hydrodynamic Properties for spar platform.
Table 2.
Hydrodynamic Properties for spar platform.
| Description | Coefficient | Value |
|---|
| Spar | Drag | 0.6 |
| Inertia | 2.0 |
| Added mass | 1.0 |
| Mooring line | Drag | 1.0 |
| Inertia | 2.2 |
| Added mass | 1.2 |
Table 3.
Statistical surge response of spar platform for wave height of 12.65 m and wave period of 11.39 s.
Table 3.
Statistical surge response of spar platform for wave height of 12.65 m and wave period of 11.39 s.
| Response of Surge (m) | Max | Min | Mean | Std. Deviation |
|---|
| ANN model | 11.311 | −10.154 | 0.916 | 3.917 |
| FEM | 11.279 | −9.497 | 1.017 | 3.741 |
| Difference (%) | 0.29 | 6.478 | 9.93 | 4.477 |
Table 4.
Statistical heave responses of ANN and FEM at a wave height of 9.65 m and a period of 9.94 s.
Table 4.
Statistical heave responses of ANN and FEM at a wave height of 9.65 m and a period of 9.94 s.
| Heave Response (m) | Max | Min | Mean | Standard Deviation |
|---|
| Resp-Pred | 0.574 | −0.575 | 0.033 | 0.222 |
| FEM | 0.675 | −0.668 | 0.033 | 0.250 |
| Difference (%) | 14.96 | 13.92 | 0.480 | 11.2 |
Table 5.
ANN and FEM statistical pitch responses for wave height of 9.65 m and the wave period of 9.94 s.
Table 5.
ANN and FEM statistical pitch responses for wave height of 9.65 m and the wave period of 9.94 s.
| Pitch Response (m) | Max | Min | Mean | Standard Deviation |
|---|
| FEM | 0.055 | −0.057 | 0.00026 | 0.021 |
| Resp-Pred | 0.057 | −0.057 | 0.00019 | 0.021 |
| Difference (%) | 3.56 | 0.287 | 24.038 | 0.173 |
Table 6.
FEM and ANN results for statistical mooring line top tension response for wave height of 12.65 m and time of 11.39 s.
Table 6.
FEM and ANN results for statistical mooring line top tension response for wave height of 12.65 m and time of 11.39 s.
| Mooring line Tension (N) | Min | Max | Mean | Standard Deviation |
|---|
| Resp-Pred | 11,182,323.9 | 17,085,820.59 | 16,263,011 | 463,165.8 |
| FEM | 11,182,200 | 17,062,834.5 | 16,266,318 | 463,666.5 |
| Difference (%) | 0.001 | 0.13 | 0.020 | 0.108 |
Table 7.
The statistics of the ANN models for training results.
Table 7.
The statistics of the ANN models for training results.
| Parameter | Max. Error | Min Error | Standard
Deviation Error | RMSE | Bias | R |
|---|
| Wave Height (m) | 0.3368 | −0.4832 | 0.0662 | 0.0673 | 0.0123 | 0.996 |
| Wave Period (s) | 0.6969 | −2.1046 | 0.2078 | 0.2106 | 0.0344 | 0.989 |
Table 8.
Results predicted by ANN and FEM in a statistical comparison of Spar mooring responses.
Table 8.
Results predicted by ANN and FEM in a statistical comparison of Spar mooring responses.
| Parameter | MaxE | MinE | StdevE | Bias | RMSE | R |
|---|
| Surge response (m) | 2.564 | −2.749 | 0.75 | 0.1005 | 0.757 | 0.9819 |
| Pitch response (rad) | 0.004 | −0.003 | 0.001 | 0.0001 | 0.001 | 0.999 |
| Heave response (m) | 0.119 | −0.128 | 0.041 | −0.0002 | 0.041 | 0.9919 |
| Top tension (N) | 116230 | −88155 | 35704 | 3307.5 | 35839 | 0.997 |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}