
Non-Linear Interactions of Jeffcott-Rotor System Controlled by a Radial PD-Control Algorithm and Eight-Pole Magnetic Bearings Actuator



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Equations of Motion
3. Analytical Investigations
4. Sensitivity Investigations and Numerical Simulations
4.1. System Dynamics without Control ()
4.2. System Dynamics with Control ()
5. Non-Linear Dynamics of the Jeffcott System before and after Control
6. Conclusions
- The uncontrolled Jeffcott rotor system responds as a linear dynamical system with a mono-stable periodic solution regardless of the system angular velocity as long as the shaft eccentricity as shown in Figure 4.
- At the large disc eccentricity (i.e., ), the nonlinearities dominate the response curves of the uncontrolled Jeffcott system, where the rotor may oscillate by one of two periodic solutions depending on the initial conditions as shown in Figure 4.
- The uncontrolled Jeffcott system has symmetric bifurcation characteristics and symmetric stable periodic motion in both the horizontal and the vertical direction regardless of the shaft eccentricity and the rotor spinning speed.
- The coupling of the radial PD-control algorithm to the Jeffcott rotor via an eight-pole magnetic actuator results in a new dynamical system with completely different oscillatory behaviors and bifurcation characteristics than the uncontrolled Jeffcott system.
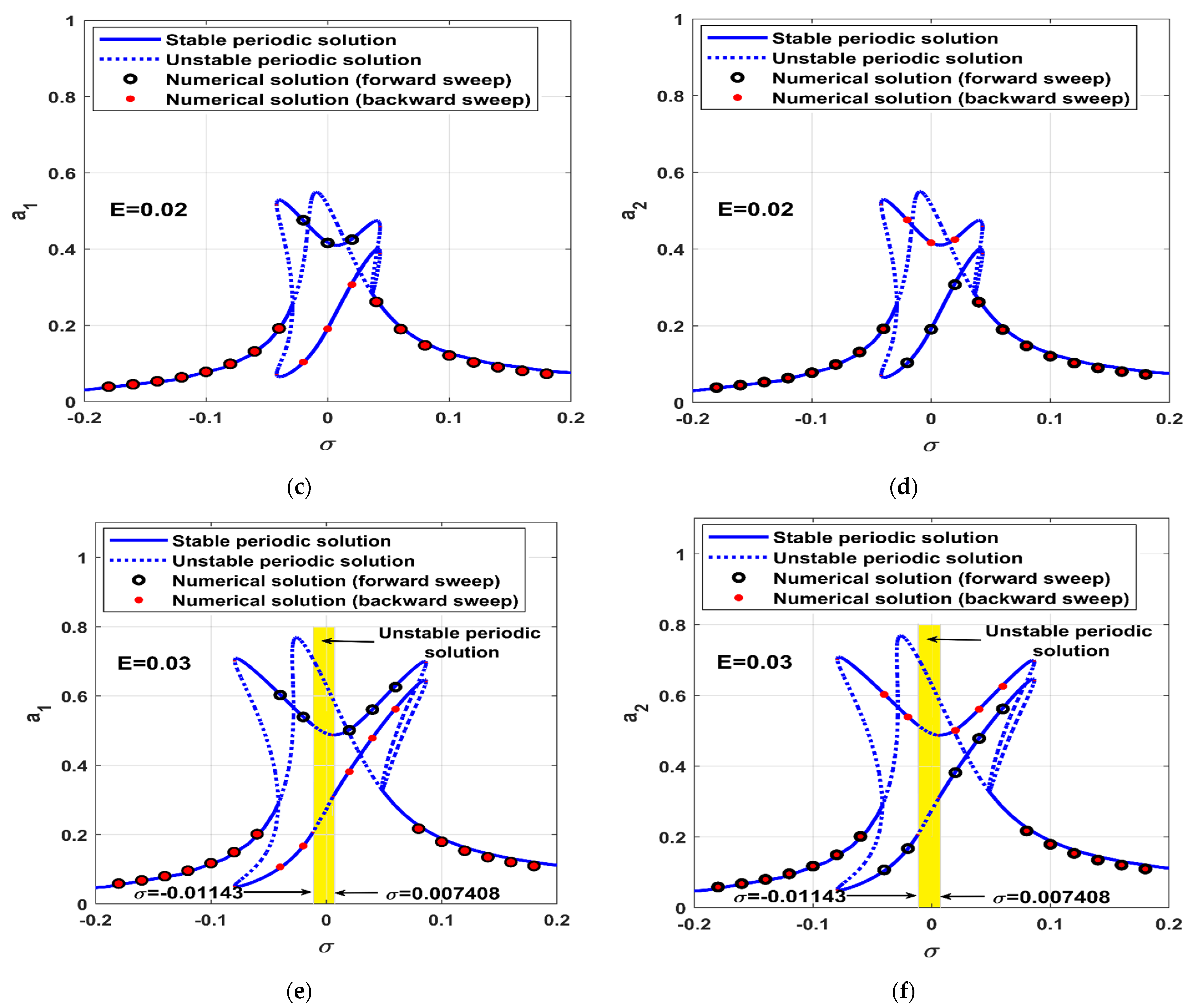
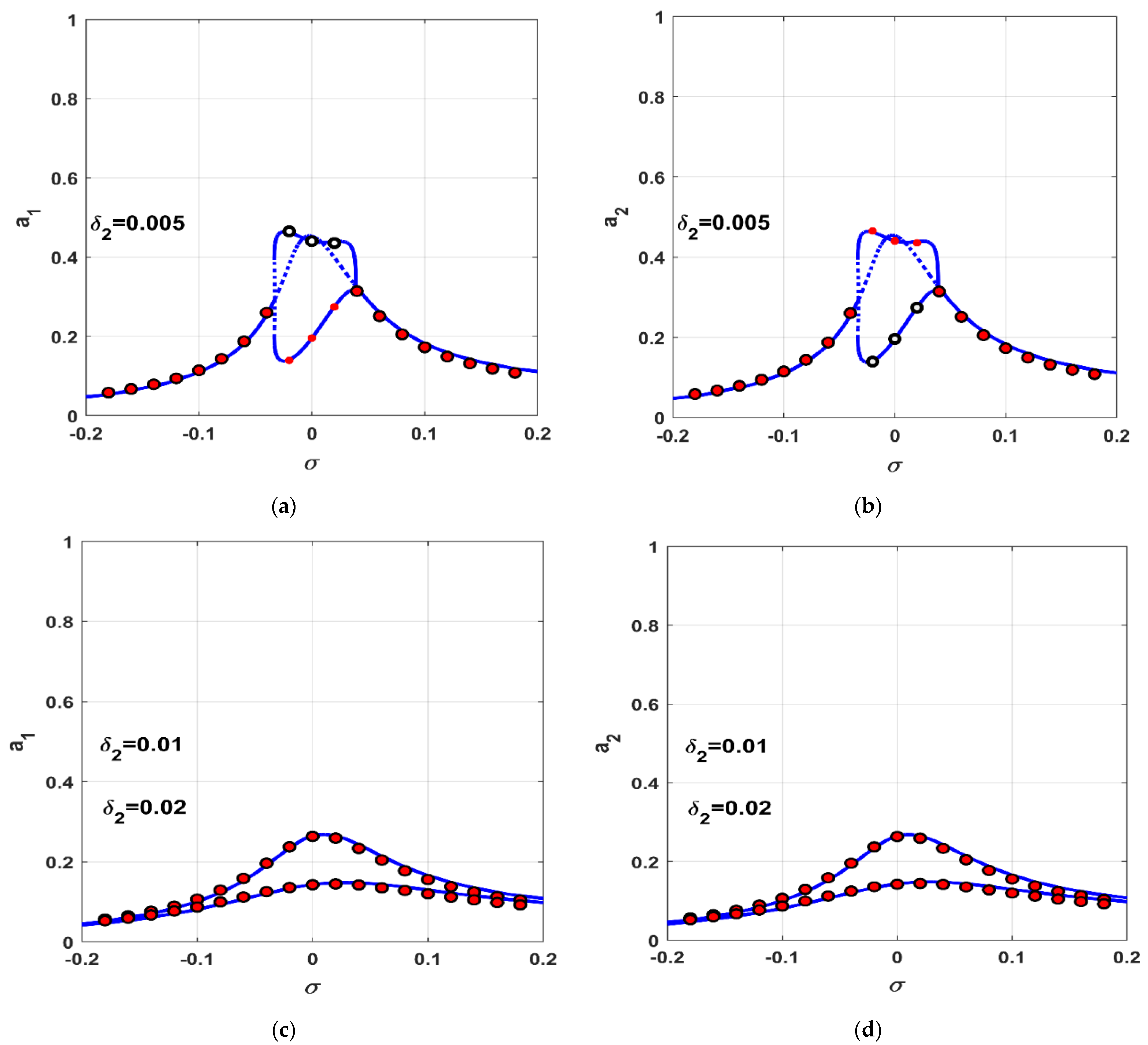
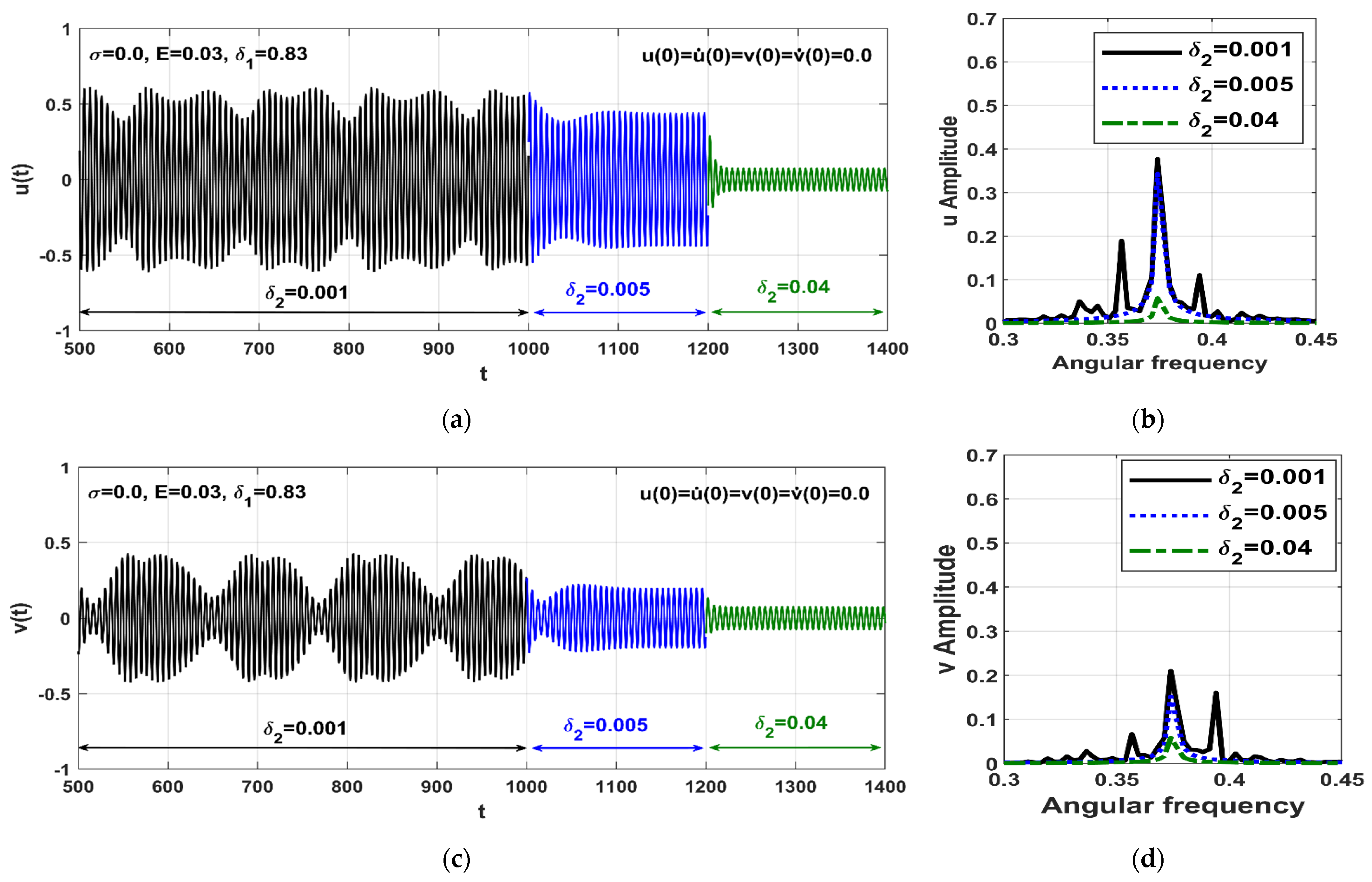
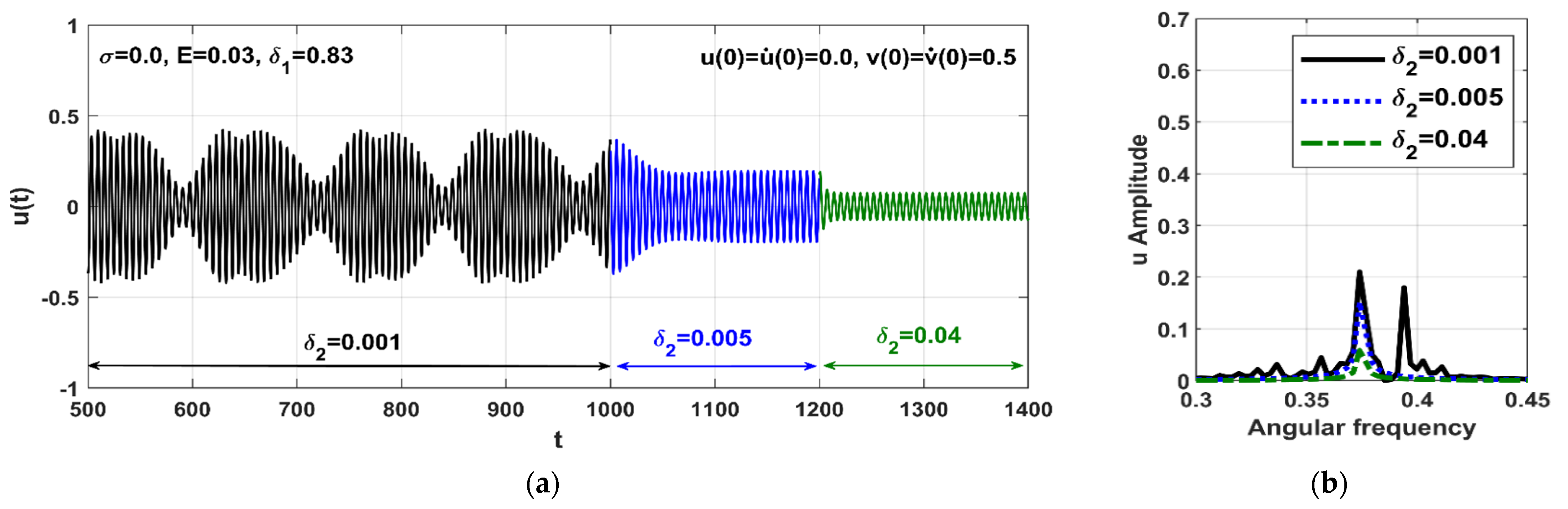
- Despite that the vibration control efficiency of the eight-pole magnetic actuator is higher than that of the four-pole magnetic actuator [24,25,26,27,28], it may destabilize the stable motion and force the Jeffcott system to oscillate with a quasi-periodic or chaotic motion if the control parameters ( and ) have not selected properly, as in Figure 7, Figure 8, Figure 9 and Figure 10. However, that is not the case with the four-pole actuator as reported in refs [24,25,26,27,28].
- The controlled Jeffcott system has symmetric bifurcation characteristics and asymmetric oscillation in both the horizontal and the vertical direction regardless of the shaft eccentricity and the rotor spinning speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Symbols
| Normalized displacement, velocity, and acceleration of the controlled Jeffcott-rotor in direction. | |
| Normalized displacement, velocity, and acceleration of the controlled Jeffcott system in direction | |
| Normalized Linear damping of Jeffcott-rotor system in and directions. | |
| Normalized cubic non-linear stiffness coefficient of Jeffcott-rotor system | |
| Normalized angular speed of the rotor. | |
| Normalized Jeffcott-rotor eccentricity. | |
| Normalized proportional gain of the applied radial PD-controller. | |
| Normalized derivative gain of the applied radial PD-controller. | |
| Normalized linear and non-linear coupling coefficients between the Jeffcott system and the eight-pole actuator. | |
| Detuning parameter to describe the difference between the system angular speed and normalized natural frequency, where | |
| Normalized oscillation amplitudes of the controlled Jeffcott-rotor system in and directions. |
Appendix A
References
- Yamamoto, T. On the vibrations of a shaft supported by bearings having radial clearances. Trans. Jpn. Soc. Mech. Eng. 1955, 21, 186–192. [Google Scholar] [CrossRef] [Green Version]
- Ehrich, F.F. High-order subharmonic response of highspeed rotors in bearing clearance. ASME J. Vib. Acoust. Stress. Reliab. Des. 1988, 110, 9–16. [Google Scholar] [CrossRef]
- Ganesan, R. Dynamic response and stability of a rotor support system with non-symmetric bearing clearances. Mech. Mach. Theory 1996, 31, 781–798. [Google Scholar] [CrossRef]
- Chávez, J.P.; Hamaneh, V.V.; Wiercigroch, M. Modelling and experimental verification of an asymmetric Jeffcott rotor with radial clearance. J. Sound Vib. 2015, 334, 86–97. [Google Scholar] [CrossRef]
- Yamamoto, T.; Ishida, Y. Theoretical discussions on vibrations of a rotating shaft with non-linear spring characteristics. Arch. Appl. 1977, 46, 125–135. [Google Scholar]
- Ishida, Y.; Ikeda, T.; Yamamoto, T.; Murakami, S. Vibration of a rotating shaft with non-linear spring characteristics during acceleration through a critical speed. 2nd report. A critical speed of a 1/2-order subharmonic oscillation. Trans. Jpn. Soc. Mech. Eng. 1986, 55, 636–643. [Google Scholar] [CrossRef] [Green Version]
- Ishida, Y.; Ikeda, T.; Yamamoto, T.; Murakami, S. Nonstationary vibration of a rotating shaft with non-linear spring characteristics during acceleration through a critical speed. A critical speed of a 1/2-order subharmonic oscillation. JSME Int. J. 1989, 32, 575–584. [Google Scholar]
- Adiletta, G.; Guido, A.R.; Rossi, C. Non-periodic motions of a Jeffcott rotor with non-linear elastic restoring forces. Non-Linear Dyn. 1996, 11, 37–59. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Noah, S. Quasi-periodic response and stability analysis for a non-linear Jeffcott rotor. J. Sound Vib. 1996, 190, 239–253. [Google Scholar] [CrossRef]
- Ishida, Y.; Inoue, T. internal resonance phenomena of the Jeffcott rotor with non-linear spring characteristics. J. Vib. Acoust. 2004, 126, 476–484. [Google Scholar] [CrossRef]
- Cveticanin, L. Free vibration of a Jeffcott rotor with pure cubic non-linear elastic property of the shaft. Mech. Mach. Theory 2005, 40, 1330–1344. [Google Scholar] [CrossRef]
- Yabuno, H.; Kashimura, T.; Inoue, T.; Ishida, Y. Non-linear normal modes and primary resonance of horizontally supported Jeffcott rotor. Non-Linear Dyn. 2011, 66, 377–387. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Gohary, H.A. On the non-linear oscillations of a horizontally supported Jeffcott rotor with a non-linear restoring force. Non-Linear Dyn. 2017, 88, 293–314. [Google Scholar] [CrossRef]
- Han, Q.; Chu, F. Parametric instability of a Jeffcott rotor with rotationally asymmetric inertia and transverse crack. Non-Linear Dyn. 2013, 73, 827–842. [Google Scholar] [CrossRef]
- Saeed, N.A.; Eissa, M. Bifurcation analysis of a transversely cracked non-linear Jeffcott rotor system at different resonance cases. Int. J. Acoust. Vib. 2019, 24, 284–302. [Google Scholar] [CrossRef]
- Saeed, N.A.; Mohamed, M.S.; Elagan, S.K. Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Non-linear Rotor System. Symmetry 2020, 12, 2059. [Google Scholar] [CrossRef]
- Chang-Jian, C.-W.; Chen, C.-K. Chaos of rub–impact rotor supported by bearings with non-linear suspension. Tribol. Int. 2009, 42, 426–439. [Google Scholar] [CrossRef]
- Chang-Jian, C.-W.; Chen, C.-K. Non-linear analysis of a rub-impact rotor supported by turbulent couple stress fluid film journal bearings under quadratic damping. Non-Linear Dyn. 2009, 56, 297–314. [Google Scholar] [CrossRef]
- Khanlo, H.M.; Ghayour, M.; Ziaei-Rad, S. Chaotic vibration analysis of rotating, flexible, continuous shaft-disk system with a rub-impact between the disk and the stator. Commun. Non-Linear Sci. Numer. Simulat. 2011, 16, 566–582. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, L.; Liu, Y.; Wen, B. Non-linear Dynamics of Jeffcott Rotor System with Rub-Impact Fault. Adv. Eng. Forum 2011, 2–3, 722–727. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zhou, J.; Dong, D.; Yan, B.; Huang, C. Non-linear dynamic analysis of a rub-impact rotor supported by oil film bearings. Arch. Appl. Mech. 2013, 83, 413–430. [Google Scholar] [CrossRef]
- Khanlo, H.M.; Ghayour, M.; Ziaei-Rad, S. The effects of lateral–torsional coupling on the non-linear dynamic behavior of a rotating continuous flexible shaft–disk system with rub–impact. Commun. Non-Linear Sci. Numer. Simulat. 2013, 18, 1524–1538. [Google Scholar] [CrossRef]
- Hu, A.; Hou, L.; Xiang, L. Dynamic simulation and experimental study of an asymmetric double-disk rotor-bearing system with rub-impact and oil-film instability. Non-Linear Dyn. 2016, 84, 641–659. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Bendary, S.I.; Sayed, M.; Mohamed, M.S.; Elagan, S.K. On the oscillatory behaviours and rub-impact forces of a horizontally supported asymmetric rotor system under position-velocity feedback controller. Lat. Am. J. Solids Struct. 2021, 18, e349. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; Maarouf, A.; Farh, H.M.H.; Alturki, F.A.; Awrejcewicz, J. Rub-impact force induces periodic, quasiperiodic, and chaotic motions of a controlled asymmetric rotor system. Shock. Vib. 2021, 2021, 1800022. [Google Scholar] [CrossRef]
- Ishida, Y.; Inoue, T. Vibration Suppression of non-linear rotor systems using a dynamic damper. J. Vib. Control. 2007, 13, 1127–1143. [Google Scholar] [CrossRef]
- Saeed, N.A.; Kamel, M. Non-linear PD-controller to suppress the non-linear oscillations of horizontally supported Jeffcott-rotor system. Int. J. Non-Linear Mech. 2016, 87, 109–124. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Sensitivity analysis and vibration control of asymmetric non-linear rotating shaft system utilizing 4-pole AMBs as an actuator. Eur. J. Mech. A/Solids 2021, 86, 104145. [Google Scholar] [CrossRef]
- Ji, J.C. Dynamics of a Jefcott rotor-magnetic bearing system with time delays. Int. J. Non-Linear Mech. 2003, 38, 1387–1401. [Google Scholar] [CrossRef]
- Xiu-yan, X.; Wei-hua, J. Singularity analysis of Jeffcott rotor-magnetic bearing with time delays. Appl. Math. J. Chin. Univ. 2012, 27, 419–427. [Google Scholar]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Abouel Nasr, E.; Awrejcewicz, J. On the Performance of a Non-linear Position-Velocity Controller to Stabilize Rotor-Active Magnetic-Bearings System. Symmetry 2021, 13, 2069. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awrejcewicz, J.; Mousa, A.A.A.; Mohamed, M.S. ALIPPF-Controller to Stabilize the Unstable Motion and Eliminate the Non-Linear Oscillations of the Rotor Electro-Magnetic Suspension System. Appl. Sci. 2022, 12, 3902. [Google Scholar] [CrossRef]
- Saeed, N.A.; Mohamed, M.S.; Elagan, S.K.; Awrejcewicz, J. Integral Resonant Controller to Suppress the Non-linear Oscillations of a Two-Degree-of-Freedom Rotor Active Magnetic Bearing System. Processes 2022, 10, 271. [Google Scholar] [CrossRef]
- Saeed, N.A.; Awwad, E.M.; El-Meligy, M.A.; Nasr, E.S.A. Radial versus cartesian control strategies to stabilize the non-linear whirling motion of the six-pole rotor-AMBs. IEEE Access 2020, 8, 138859–138883. [Google Scholar] [CrossRef]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Aboudaif, M.K.; Awrejcewicz, J. Control Performance, Stability Conditions, and Bifurcation Analysis of the Twelve-Pole Active Magnetic Bearings System. Appl. Sci. 2021, 11, 10839. [Google Scholar] [CrossRef]
- Heindel, S.; Becker, F.; Rinderknecht, S. Unbalance and resonance elimination with active bearings on a Jeffcott Rotor. Mech. Syst. Signal Process. 2017, 85, 339–353. [Google Scholar] [CrossRef]
- Heindel, S.; Müller, P.C.; Rinderknecht, S. Unbalance and resonance elimination with active bearings on general rotors. J. Sound Vib. 2018, 431, 422–440. [Google Scholar] [CrossRef]
- Heindel, S. Unbalance and Resonance Elimination on General Rotors with Active Bearings. Ph.D. Thesis, Department of Mechanical Engineering, The Technical University of Darmstadt, Darmstadt, Germany, 2017. [Google Scholar]
- Ishida, Y.; Yamamoto, T. Linear and Non-Linear Rotordynamics: A Modern Treatment with Applications, 2nd ed.; Wiley-VCH Verlag GmbH & Co., KGaA: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Schweitzer, G.; Maslen, E.H. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Non-Linear Oscillations; Wiley: New York, NY, USA, 1995. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Resolving Controversies in the Application of the Method of Multiple Scales and the Generalized Method of Averaging. Non-Linear Dyn. 2005, 40, 61–102. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Non-Linear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Yang, W.Y.; Cao, W.; Chung, T.; Morris, J. Applied Numerical Methods Using Matlab; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]

























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, N.A.; Omara, O.M.; Sayed, M.; Awrejcewicz, J.; Mohamed, M.S. Non-Linear Interactions of Jeffcott-Rotor System Controlled by a Radial PD-Control Algorithm and Eight-Pole Magnetic Bearings Actuator. Appl. Sci. 2022, 12, 6688. https://0-doi-org.brum.beds.ac.uk/10.3390/app12136688
Saeed NA, Omara OM, Sayed M, Awrejcewicz J, Mohamed MS. Non-Linear Interactions of Jeffcott-Rotor System Controlled by a Radial PD-Control Algorithm and Eight-Pole Magnetic Bearings Actuator. Applied Sciences. 2022; 12(13):6688. https://0-doi-org.brum.beds.ac.uk/10.3390/app12136688
Chicago/Turabian StyleSaeed, Nasser A., Osama M. Omara, M. Sayed, Jan Awrejcewicz, and Mohamed S. Mohamed. 2022. "Non-Linear Interactions of Jeffcott-Rotor System Controlled by a Radial PD-Control Algorithm and Eight-Pole Magnetic Bearings Actuator" Applied Sciences 12, no. 13: 6688. https://0-doi-org.brum.beds.ac.uk/10.3390/app12136688