
Machine Learning Techniques Applied to Identify the Two-Phase Flow Pattern in Porous Media Based on Signal Analysis


Abstract
:1. Introduction
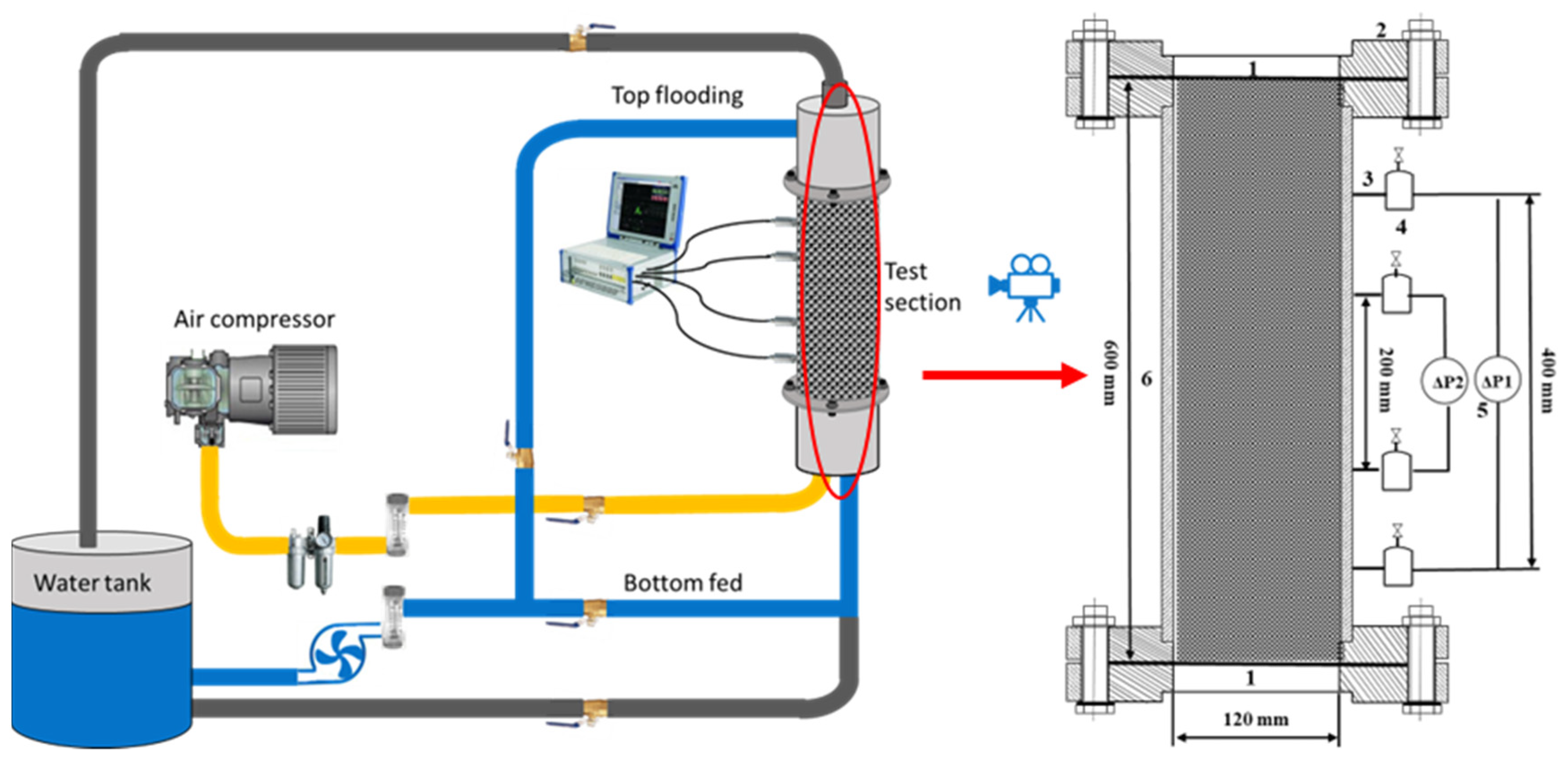
2. Description of Experiments
3. Methodology
3.1. Feature Extraction Methodology
3.1.1. Characteristics of Time Domain
3.1.2. Characteristics of Time-Frequency Domain
- (1)
- Find all extreme points of signal I(n).
- (2)
- Use a cubic spline curve to fit the envelope Emax(n) and Emin(n) of the upper and lower extreme points, and find the average value m1(n) of the upper and lower envelope and subtract it from I(n):
- (3)
- Judge whether h(n) is IMF according to preset criteria:
- (1)
- In the whole time range of the function, the number of local extreme points and zero crossing points must be equal or be at most one difference;
- (2)
- At any time point, the envelope of the local maximum (upper envelope) and the envelope of the local minimum (lower envelope) must be zero on average;
- (4)
- If not, replace I(n) with h(n) and repeat the above steps until h(n) meets the criteria; then h(n) is the IMFm(n) to be extracted;
- (5)
- Each time the IMFm(n) is obtained, it is deducted from the original signal and the above steps are repeated until the last remaining part RESM(n) of the signal is only a monotone sequence or a constant value sequence. In this way, the original signal I(n) is decomposed into the linear superposition of a series of IMFm(n) and the remaining parts:
3.2. Machine Learn Methodologies
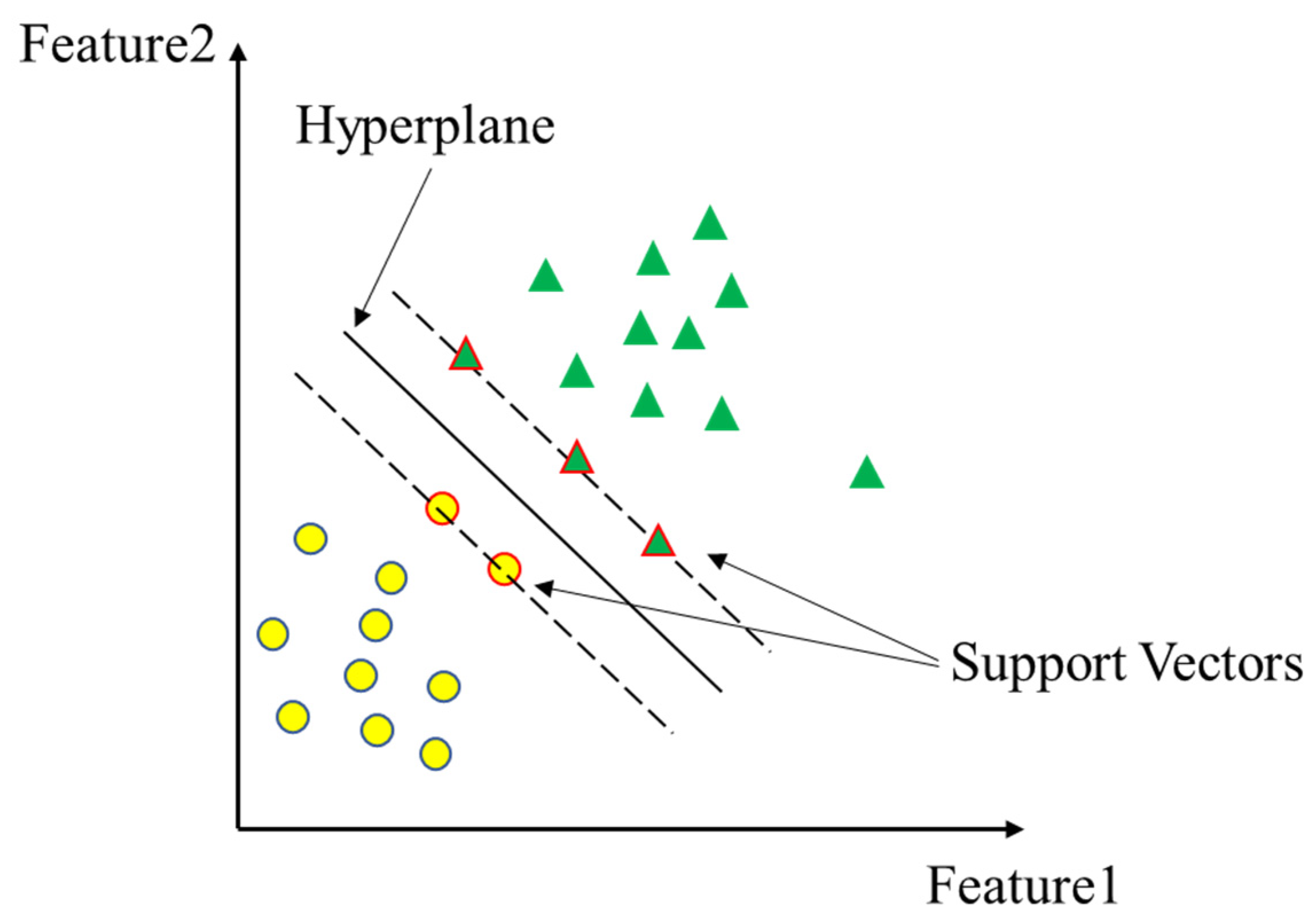
3.2.1. Support Vector Machine
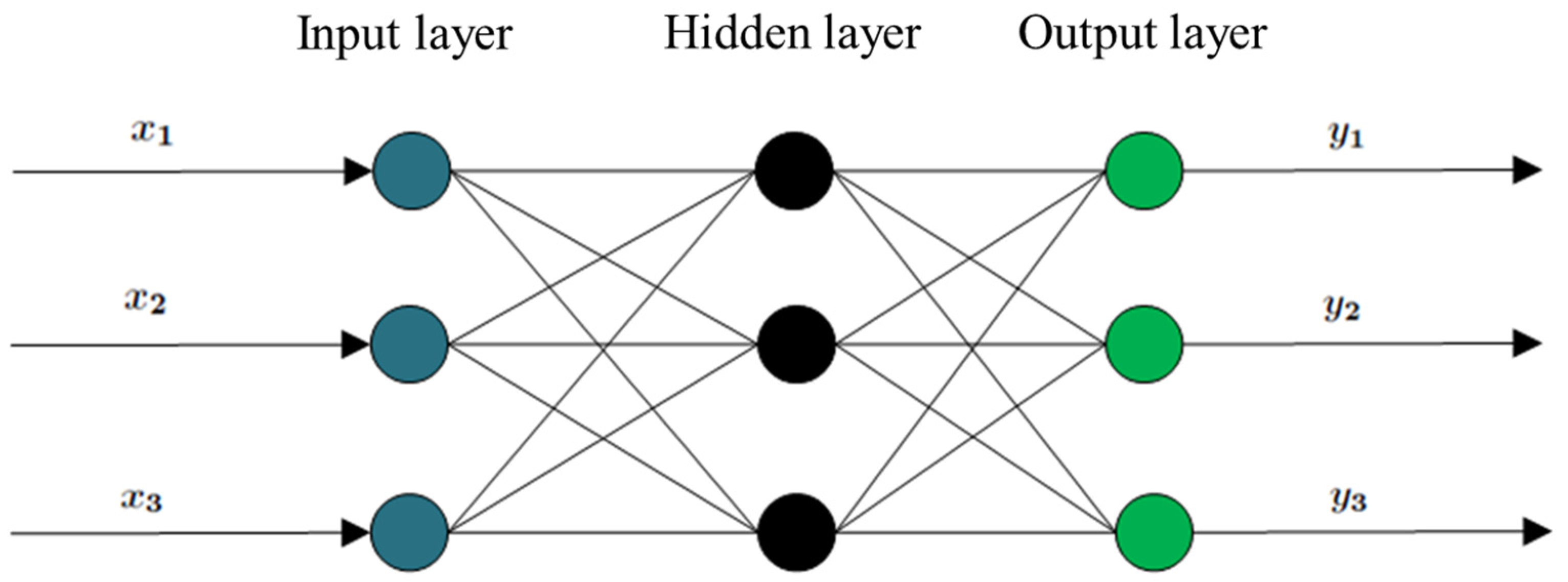
3.2.2. BP Neural Network
4. Results and Discussion
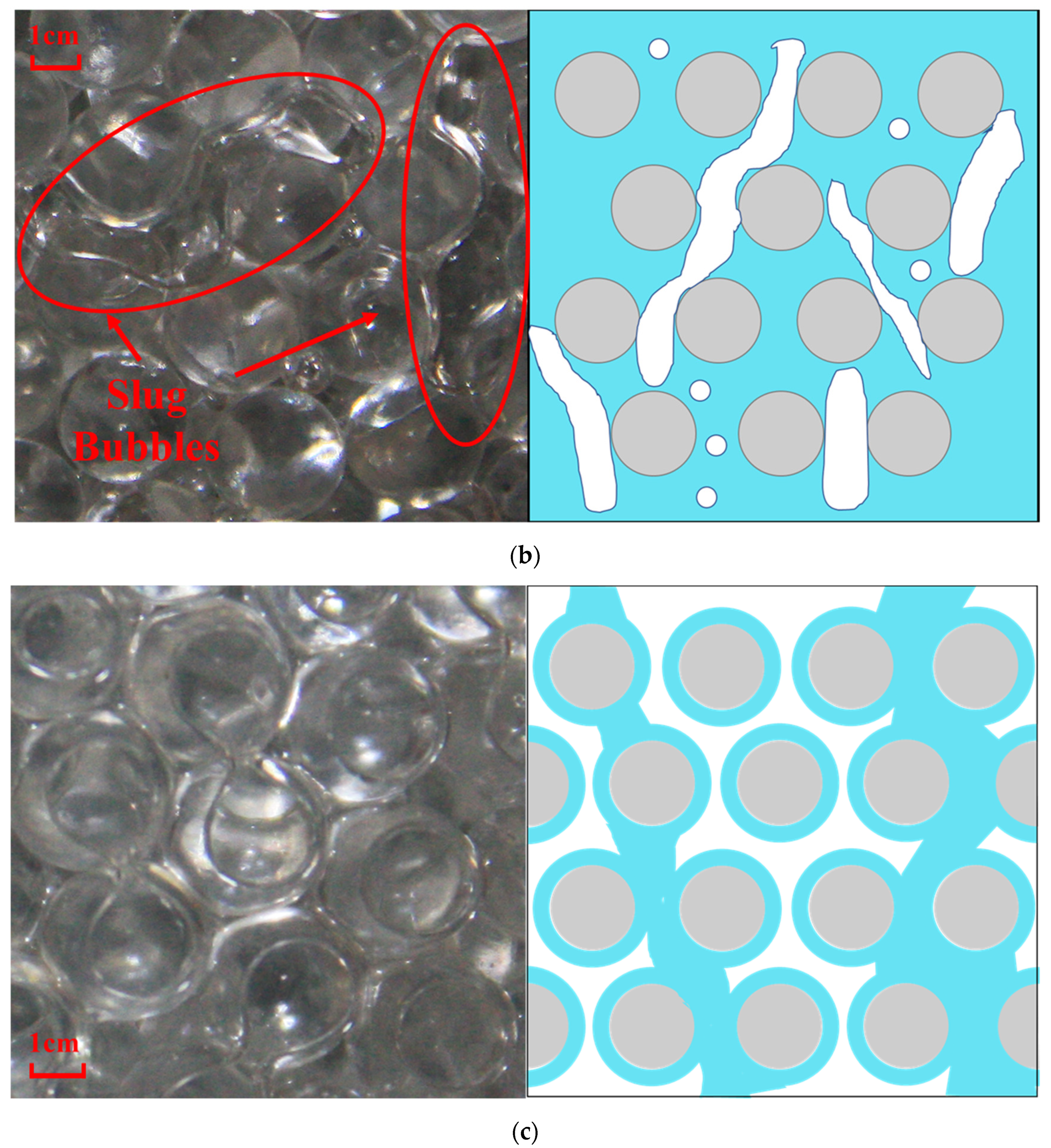
4.1. Experiment Results
4.2. Feature Extraction
4.2.1. Time Domain Feature Extraction
4.2.2. Time-Frequency Feature Extraction
4.3. Machine Learning Identification
5. Conclusions
- (1)
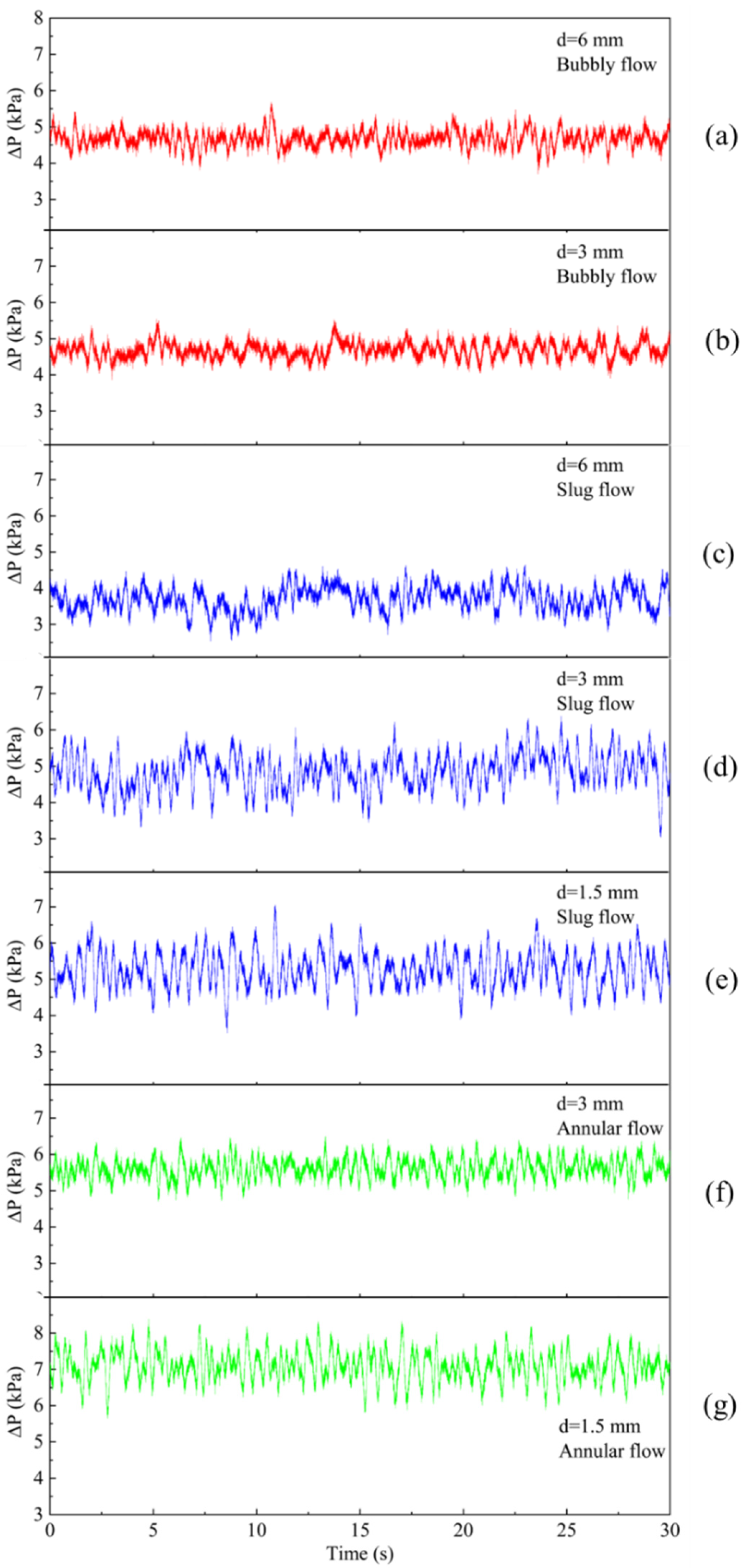
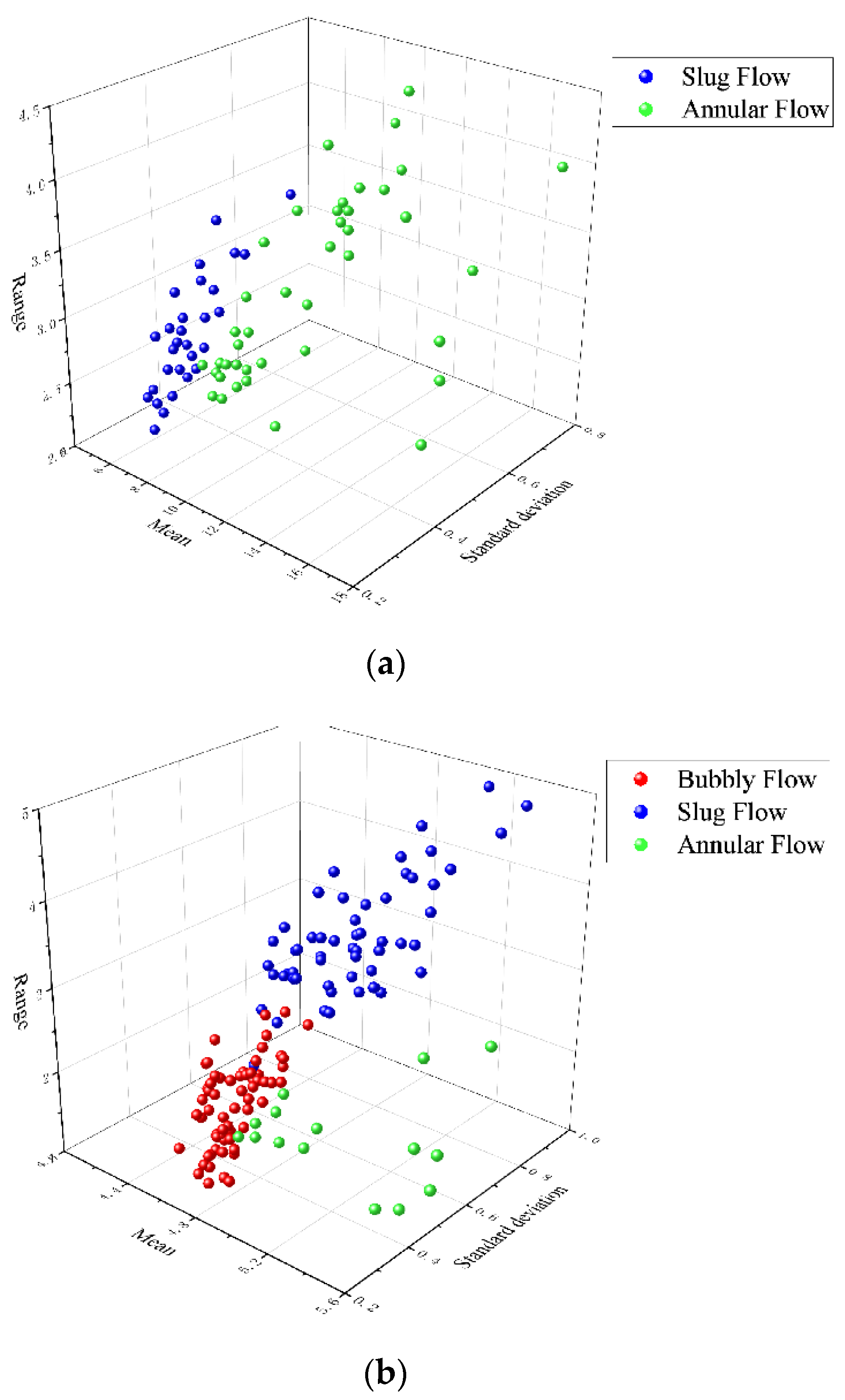
- There are differences between the average values of differential pressure signals of different flow patterns. For a porous bed with a particle diameter of 1.5 mm, the boundary between slug flow and annular flow is 8 kPa. For a porous bed with a particle diameter of 3 mm, the distribution range of average differential pressure of different flow patterns overlaps. For a porous bed with a particle diameter of 6 mm, the boundary between bubbly flow and slug flow is 4 kPa. For other parameters, the overlapping area between different flow patterns is larger, and it is difficult to distinguish the flow patterns only by manual identification. It is necessary to introduce machine learning technology.
- (2)
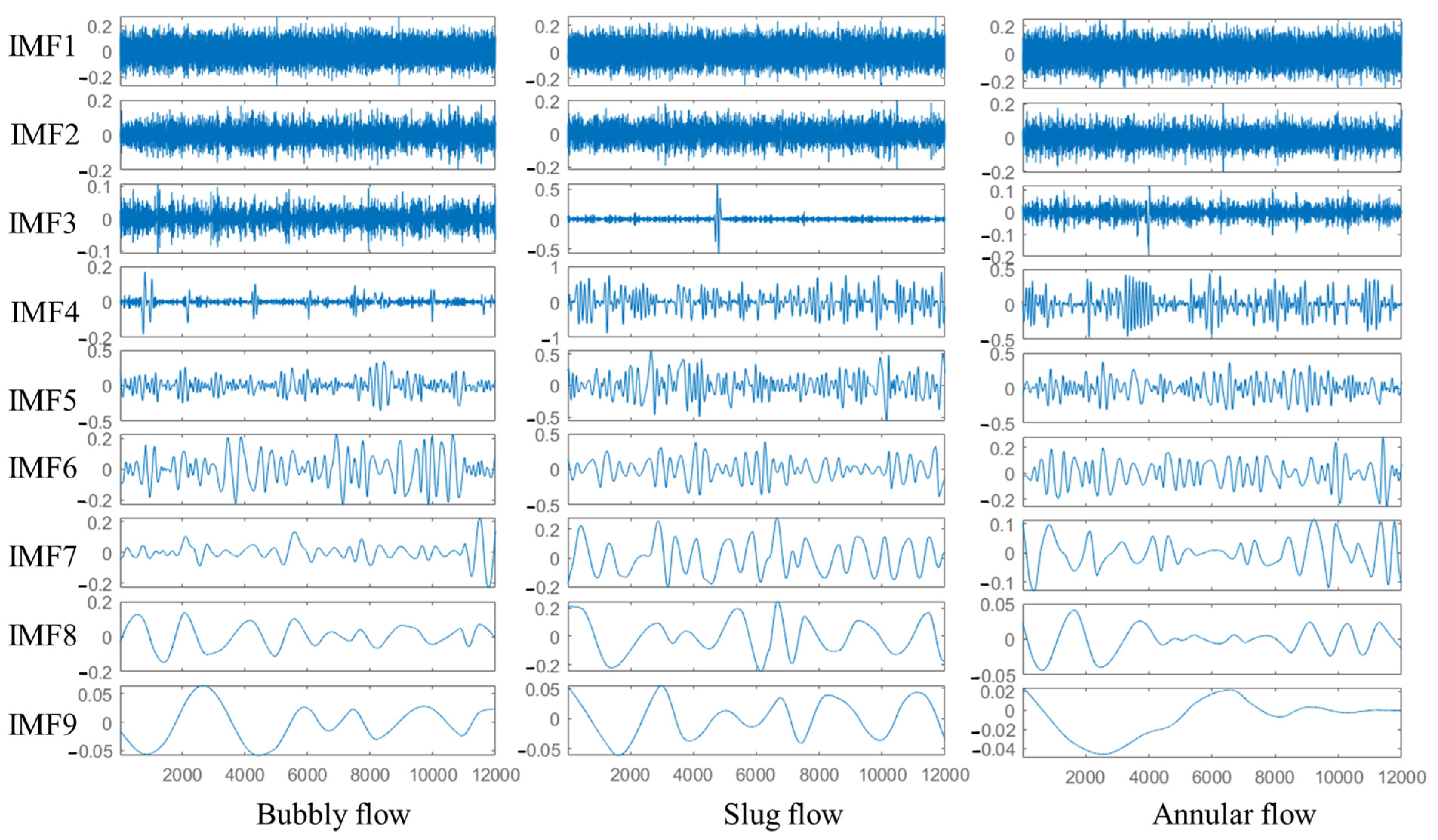
- The BP-1 model based on BP neural network technology has the best identification ability among single models, with an accuracy of 96.08%. However, another BP-2 model based on different levels of EMD energy has the worst identification ability. Its accuracy is only 91.5%. The identification ability of the two models SVM-1 and SVM-2 trained by SVM technology is close, since the accuracies of them are 94.77%, and 93.4%, respectively. In this study, the two neural network models have the highest and lowest recognition accuracy. Although the SVM model is lower than the optimal neural network model in recognition accuracy, the recognition ability of the two models is closer. SVM technology is more stable than BP neural network technology.
- (3)
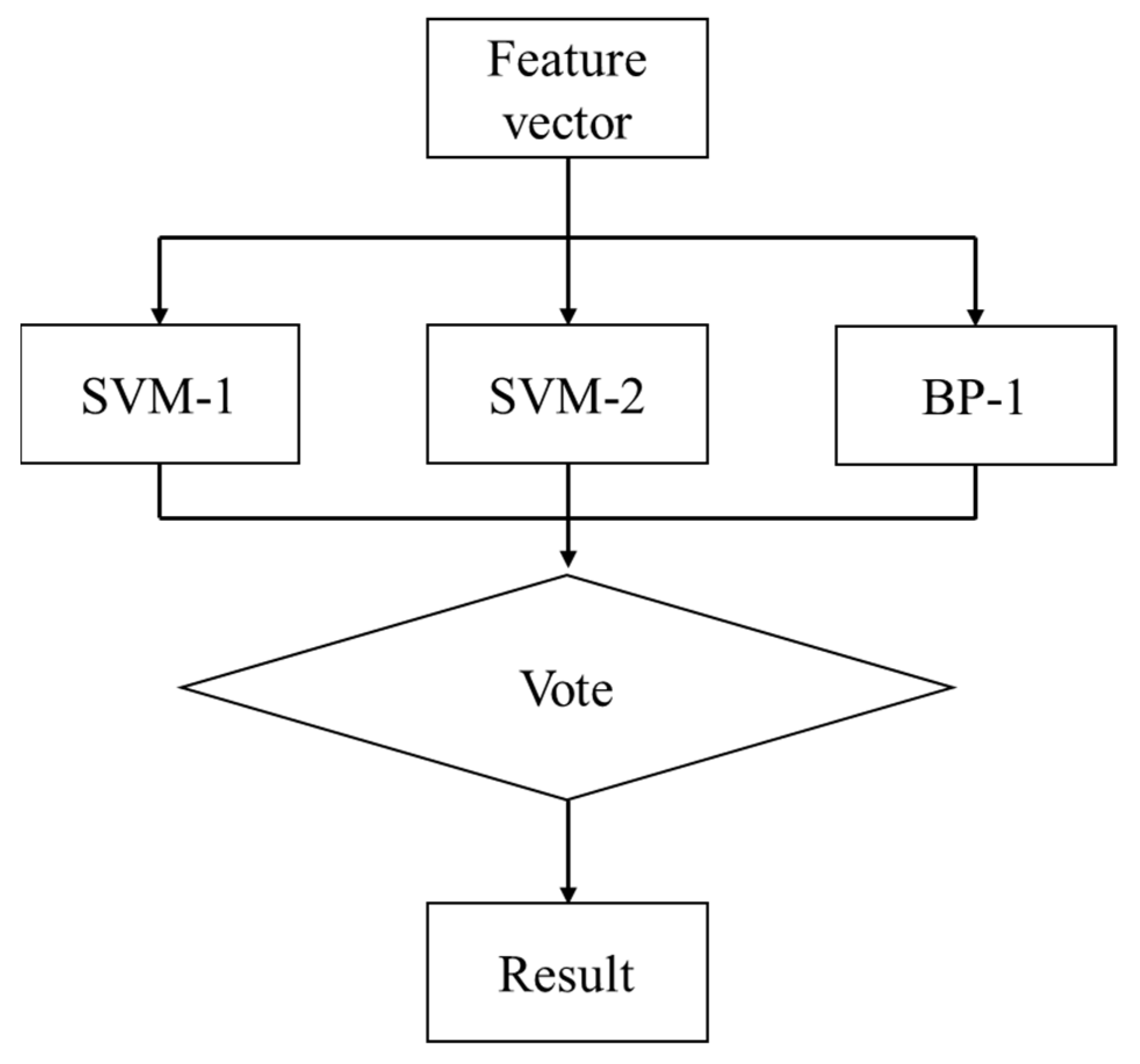
- By integrating several high-quality models, the integrated model can further improve the ability of flow pattern identification on the basis of the original models. The identification accuracy increased from 94.77% to 98.04%. This behavior will increase the total calculation time because it takes time to train each model. The total time is approximately equal to the sum of the time needed to train the three models, respectively. Users can consider comprehensively according to the requirements for accuracy and timeliness. Moreover, poor quality models will reduce the identification ability of integrated models.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| a | approximation coefficient, 1 |
| b | Constant term of hyperplane equation,1 |
| C | Crest factor, 1 |
| E | local energy density, 1 |
| J | flow rate, mm/s |
| K | kernel function |
| P | power spectral density, kPa2/Hz |
| R | Range value |
| s | signal |
| S | Standard deviation |
| t | time |
| x | Coordinates |
| y | Coordinates |
| z | Coordinates |
| Ф | scaling function |
| Subscripts | |
| g | gas |
| i | unit number |
| j | unit number |
| k | unit number |
| m | unit number |
| max | maximum |
| min | minimum |
| M | unit number |
| R | Range value |
| S | Standard deviation |
| Acronyms | |
| BP | Back propagation |
| EMD | Empirical mode decomposition |
| IMF | Intrinsic mode function |
| SVM | support vector machine |
References
- Ma, W.; Yuan, Y.; Sehgal, B.R. In-Vessel Melt Retention of Pressurized Water Reactors: Historical Review and Future Research Needs. Engineering 2016, 2, 103–111. [Google Scholar] [CrossRef]
- Hu, B.; Gu, Z.; Zhou, C.; Wang, L.; Huang, C.; Su, J. Investigation of the Effect of Capillary Barrier on Water–Oil Movement in Water Flooding. Appl. Sci. 2022, 12, 6285. [Google Scholar] [CrossRef]
- Kulli, B. Visualizing soil compaction based on flow pattern analysis. Soil Tillage Res. 2003, 70, 29–40. [Google Scholar] [CrossRef]
- Zhang, C.; Jiao, W.; Liu, Y.; Qi, G.; Yuan, Z.; Zhang, Q. CFD Simulation of Dry Pressure Drop in a Cross-Flow Rotating Packed Bed. Appl. Sci. 2021, 11, 10099. [Google Scholar] [CrossRef]
- Yao, T.; Wu, Q.; Liu, Z.; Zou, S.; Xu, Q.; Guo, L. Experimental investigation on mitigation of severe slugging in pipeline-riser system by quasi-plane helical pipe device. Exp. Therm. Fluid Sci. 2019, 102, 189–204. [Google Scholar] [CrossRef]
- Tosun, G. A study of cocurrent downflow of nonfoaming gas-liquid systems in a packed bed. 1. Flow regimes: Search for a generalized flow map. Ind. Eng. Chem. Process Des. Dev. 1984, 23, 29–35. [Google Scholar] [CrossRef]
- Tung, V.; Dhir, V. A hydrodynamic model for two-phase flow through porous media. Int. J. Multiph. Flow 1988, 14, 47–65. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, X.; Sun, Z.; Ruan, J.; He, B. Flow patterns and transition criteria in boiling water-cooled packed bed reactors. Prog. Nucl. Energy 2018, 108, 214–221. [Google Scholar] [CrossRef]
- Shaban, H.; Tavoularis, S. Identification of flow regime in vertical upward air–water pipe flow using differential pressure signals and elastic maps. Int. J. Multiph. Flow 2014, 61, 62–72. [Google Scholar] [CrossRef]
- Wu, B.; Ribeiro, A.S.; Firouzi, M.; Rufford, T.E.; Towler, B. Use of pressure signal analysis to characterise counter-current two-phase flow regimes in annuli. Chem. Eng. Res. Des. 2020, 153, 547–561. [Google Scholar] [CrossRef]
- Vieira, S.C.; van der Geest, C.; Fabro, A.; de Castro, M.S.; Bannwart, A.C. Intermittent slug flow identification and characterization from pressure signature. Mech. Syst. Signal Process. 2021, 148, 107148. [Google Scholar] [CrossRef]
- Guo, W.; Liu, C.; Wang, L. Temperature fluctuation on pipe wall induced by gas–liquid flow and its application in flow pattern identification. Chem. Eng. Sci. 2021, 237, 116568. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Matsui, G. Identification of flow regimes in vertical gas-liquid two-phase flow using differential pressure fluctuations. Int. J. Multiph. Flow 1984, 10, 711–719. [Google Scholar] [CrossRef]
- Elperin, T.; Klochko, M. Flow regime identification in a two-phase flow using wavelet transform. Exp. Fluids 2002, 32, 674–682. [Google Scholar] [CrossRef]
- dos Reis, E.; Goldstein, L., Jr. Characterization of slug flows in horizontal piping by signal analysis from a capacitive probe. Flow Meas. Instrum. 2010, 21, 347–355. [Google Scholar] [CrossRef]
- Li, X.; Wei, T.; Wang, D.; Hu, H.; Kong, L.; Xiang, W. Study of gas–liquid two-phase flow patterns of self-excited dust scrubbers. Chem. Eng. Sci. 2016, 151, 79–92. [Google Scholar] [CrossRef]
- Khorasani, M.; Ghasemi, A.; Leary, M.; Sharabian, E.; Cordova, L.; Gibson, I.; Downing, D.; Bateman, S.; Brandt, M.; Rolfe, B. The effect of absorption ratio on meltpool features in laser-based powder bed fusion of IN718. Opt. Laser Technol. 2022, 153, 108263. [Google Scholar] [CrossRef]
- Sezer, H.; Tang, J.; Ahsan, A.N.; Kaul, S. Modeling residual thermal stresses in layer-by-layer formation of direct metal laser sintering process for different scanning patterns for 316L stainless steel. Rapid Prototyp. J. 2022. ahead of print. [Google Scholar] [CrossRef]
- Rashed, K.; Kafi, A.; Simons, R.; Bateman, S. Fused Filament Fabrication of Nylon 6/66 Copolymer: Parametric Study Com-paring Full Factorial and Taguchi Design of Experiments. Rapid Prototyp. J. 2022, 28, 1111–1128. [Google Scholar] [CrossRef]
- Agrawal, R. Sustainable design guidelines for additive manufacturing applications. Rapid Prototyp. J. 2022, 28, 1221–1240. [Google Scholar] [CrossRef]
- Liang, F.; Hang, Y.; Yu, H.; Gao, J. Identification of gas-liquid two-phase flow patterns in a horizontal pipe based on ultrasonic echoes and RBF neural network. Flow Meas. Instrum. 2021, 79, 101960. [Google Scholar] [CrossRef]
- Pei, S.; Liu, H.; Zhu, Y.; Zhang, C.; Zhao, M.; Fu, G.; Yang, K.; Yuan, Y.; Zhang, C. Identifying Flow Patterns in Water Pipelines Using Complex Network Theory. J. Hydraul. Eng. 2021, 147, 04021019. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H. Identification of oil–gas two-phase flow pattern based on SVM and electrical capacitance tomography technique. Flow Meas. Instrum. 2010, 21, 20–24. [Google Scholar] [CrossRef]
- Liu, W.; Tan, C.; Dong, F. Doppler spectrum analysis and flow pattern identification of oil-water two-phase flow using dual-modality sensor. Flow Meas. Instrum. 2021, 77, 101861. [Google Scholar] [CrossRef]
- Ambrosio, J.D.S.; Lazzaretti, A.E.; Pipa, D.R.; da Silva, M.J. Two-phase flow pattern classification based on void fraction time series and machine learning. Flow Meas. Instrum. 2021, 83, 102084. [Google Scholar] [CrossRef]
- Li, L.; Zou, X.; Wang, H.; Zhang, S.; Wang, K. Investigations on two-phase flow resistances and its model modifications in a packed bed. Int. J. Multiph. Flow 2018, 101, 24–34. [Google Scholar] [CrossRef]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity Analysis of k-Fold Cross Validation in Prediction Error Estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 569–575. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particle Sizes (mm) | Porosity | Superficial Velocity | Reynolds Number | ||
|---|---|---|---|---|---|
| Water (mm/s) | Gas (m/s) | Water | Gas | ||
| 1.5 | 0.391 | 0.59~1.17 | 0.005–0.44 | 1.13–2.26 | 1.87–97.93 |
| 3 | 0.385 | 0.29~1.17 | 0.005–0.44 | 1.21–5.12 | 1.98–161.92 |
| 6 | 0.4 | 0.29~1.17 | 0.005–0.44 | 2.31–10.01 | 3.65–327.55 |
| Particle Diameter | Quartile | Bubbly Flow | Slug Flow | Annular Flow | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| m | S | R | m | S | R | m | S | R | ||
| 1.5 mm | min | 5.74 | 0.28 | 2.08 | 8.02 | 0.33 | 2.35 | |||
| median | 6.13 | 0.38 | 2.65 | 10.27 | 0.46 | 3.11 | ||||
| max | 7.05 | 0.60 | 3.50 | 17.48 | 0.74 | 4.40 | ||||
| 3 mm | min | 4.65 | 0.21 | 1.47 | 4.73 | 0.38 | 2.43 | 4.93 | 0.27 | 1.79 |
| median | 4.85 | 0.30 | 2.18 | 5.05 | 0.54 | 3.64 | 5.27 | 0.29 | 2.26 | |
| max | 5.01 | 0.44 | 3.01 | 5.49 | 0.86 | 5.08 | 5.88 | 0.51 | 3.25 | |
| 6 mm | min | 4.11 | 0.17 | 1.26 | 3.38 | 0.31 | 1.99 | |||
| median | 4.60 | 0.26 | 1.91 | 3.61 | 0.37 | 2.52 | ||||
| max | 4.76 | 0.40 | 2.71 | 3.97 | 0.50 | 3.51 | ||||
| all | min | 4.11 | 0.17 | 1.26 | 3.38 | 0.28 | 1.99 | 4.93 | 0.27 | 1.79 |
| median | 4.70 | 0.28 | 1.98 | 4.91 | 0.41 | 2.79 | 9.00 | 0.40 | 2.72 | |
| max | 5.01 | 0.44 | 3.01 | 7.05 | 0.86 | 5.08 | 17.48 | 0.74 | 4.40 | |
| Particle Diameter | Quartile | Bubbly Flow | Slug Flow | Annular Flow | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Level 1 | Level 2 | Level 3 | Level 1 | Level 2 | Level 3 | Level 1 | Level 2 | Level 3 | ||
| 1.5 mm | min | 2.38% | 1.15% | 0.35% | 1.46% | 0.74% | 0.29% | |||
| median | 5.50% | 2.55% | 0.86% | 3.83% | 1.81% | 3.23% | ||||
| max | 9.06% | 4.37% | 8.97% | 7.61% | 3.58% | 30.81% | ||||
| 3 mm | min | 3.05% | 1.53% | 0.48% | 1.05% | 0.54% | 0.21% | 3.07% | 1.47% | 0.40% |
| median | 7.55% | 3.53% | 0.97% | 2.48% | 1.23% | 1.94% | 8.84% | 4.15% | 1.53% | |
| max | 16.77% | 7.71% | 7.02% | 5.01% | 2.31% | 12.42% | 12.24% | 5.88% | 5.96% | |
| 6 mm | min | 4.41% | 2.34% | 0.78% | 2.81% | 1.51% | 0.56% | |||
| median | 10.36% | 5.25% | 1.46% | 5.24% | 2.86% | 0.90% | ||||
| max | 26.74% | 12.76% | 3.55% | 7.50% | 4.04% | 2.29% | ||||
| Particle Diameter | Quartile | Bubbly Flow | Slug Flow | Annular Flow | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Level 4 | Level 5 | Level 6 | Level 4 | Level 5 | Level 6 | Level 4 | Level 5 | Level 6 | ||
| 1.5 mm | min | 12.89% | 5.62% | 4.17% | 14.67% | 8.20% | 3.18% | |||
| median | 41.20% | 15.76% | 8.70% | 49.53% | 19.06% | 6.34% | ||||
| max | 54.80% | 28.95% | 15.18% | 63.68% | 32.43% | 15.24% | ||||
| 3 mm | min | 4.20% | 7.78% | 6.28% | 18.91% | 8.80% | 3.56% | 17.22% | 9.26% | 2.95% |
| median | 27.93% | 23.54% | 15.71% | 38.60% | 16.42% | 9.37% | 47.36% | 25.62% | 5.35% | |
| max | 41.96% | 36.65% | 30.57% | 54.29% | 31.79% | 23.24% | 53.11% | 36.10% | 9.27% | |
| 6 mm | min | 15.70% | 11.03% | 6.56% | 8.97% | 10.90% | 5.52% | |||
| median | 32.78% | 22.00% | 13.26% | 22.36% | 20.97% | 15.36% | ||||
| max | 46.04% | 37.71% | 27.43% | 32.97% | 33.70% | 31.20% | ||||
| Particle Diameter | Quartile | Bubbly Flow | Slug Flow | Annular Flow |
|---|---|---|---|---|
| Level 7 | Level 7 | Level 7 | ||
| 1.5 mm | min | 2.80% | 0.52% | |
| median | 7.88% | 3.38% | ||
| max | 15.33% | 13.96% | ||
| 3 mm | min | 3.71% | 1.40% | 1.19% |
| median | 10.94% | 12.61% | 2.13% | |
| max | 24.44% | 46.50% | 9.21% | |
| 6 mm | min | 1.65% | 3.51% | |
| median | 5.02% | 14.75% | ||
| max | 12.52% | 43.14% |
| Flow Pattern Data Sets | |||
|---|---|---|---|
| Train | Test | Total | |
| Bubbly | 77 | 63 | 140 |
| Slug | 80 | 65 | 145 |
| Annular | 31 | 25 | 56 |
| total | 188 | 153 | 341 |
| Vector Type | Parameters | Label | Flow Pattern | ||||||
|---|---|---|---|---|---|---|---|---|---|
| m | S | R | Level 4 | Level 5 | Level 6 | dp | |||
| Vector-1 | 4.86 | 0.22 | 1.64 | 12.41% | 16.73% | 30.57% | 3 | 1 | Bubbly |
| 3.96 | 0.39 | 2.69 | 22.55% | 24.26% | 15.26% | 6 | 2 | Slug | |
| 8.74 | 0.34 | 2.71 | 55.92% | 12.33% | 9.04% | 1.5 | 3 | Annular | |
| m | S | R | Level 1 | Level 2 | Level 7 | dp | |||
| Vector-2 | 4.86 | 0.22 | 1.64 | 16.24% | 7.14% | 12.95% | 3 | 1 | Bubbly |
| 3.96 | 0.39 | 2.69 | 3.60% | 1.95% | 13.84% | 6 | 2 | Slug | |
| 9.08 | 0.34 | 2.72 | 6.23% | 2.85% | 2.90% | 1.5 | 3 | Annular | |
| SVM Model | Flow Pattern | Correct Identification | Total Number | Accuracy |
|---|---|---|---|---|
| SVM-1 | Bubbly | 60 | 63 | 95.24% |
| Slug | 62 | 65 | 95.38% | |
| Annular | 23 | 25 | 92.00% | |
| Overall | 145 | 153 | 94.77% | |
| SVM-2 | Bubbly | 61 | 63 | 96.83% |
| Slug | 60 | 65 | 92.31% | |
| Annular | 22 | 25 | 88.00% | |
| Overall | 143 | 153 | 93.46% |
| BP-Network Model | Flow Pattern | Correct Identification | Total Number | Accuracy |
|---|---|---|---|---|
| BP-1 | Bubbly | 61 | 63 | 96.83% |
| Slug | 63 | 65 | 96.92% | |
| Annular | 23 | 25 | 92.00% | |
| Overall | 147 | 153 | 96.08% | |
| BP-2 | Bubbly | 58 | 63 | 92.06% |
| Slug | 61 | 65 | 93.85% | |
| Annular | 21 | 25 | 84.00% | |
| Overall | 140 | 153 | 91.50% |
| Flow Pattern | Correct Identification | Total Number | Accuracy | |
|---|---|---|---|---|
| Integrated model | Bubbly | 63 | 63 | 100.00% |
| Slug | 63 | 65 | 96.92% | |
| Annular | 25 | 25 | 100.00% | |
| Overall | 151 | 153 | 98.69% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, L.; Wang, W.; Zhao, H.; Zhao, J. Machine Learning Techniques Applied to Identify the Two-Phase Flow Pattern in Porous Media Based on Signal Analysis. Appl. Sci. 2022, 12, 8575. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178575
Li X, Li L, Wang W, Zhao H, Zhao J. Machine Learning Techniques Applied to Identify the Two-Phase Flow Pattern in Porous Media Based on Signal Analysis. Applied Sciences. 2022; 12(17):8575. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178575
Chicago/Turabian StyleLi, Xiangyu, Liangxing Li, Wenjie Wang, Haoxiang Zhao, and Jiayuan Zhao. 2022. "Machine Learning Techniques Applied to Identify the Two-Phase Flow Pattern in Porous Media Based on Signal Analysis" Applied Sciences 12, no. 17: 8575. https://0-doi-org.brum.beds.ac.uk/10.3390/app12178575