
A Self-Paced P300 Healthcare Brain-Computer Interface System with SSVEP-Based Switching Control and Kernel FDA + SVM-Based Detector


Abstract
:1. Introduction
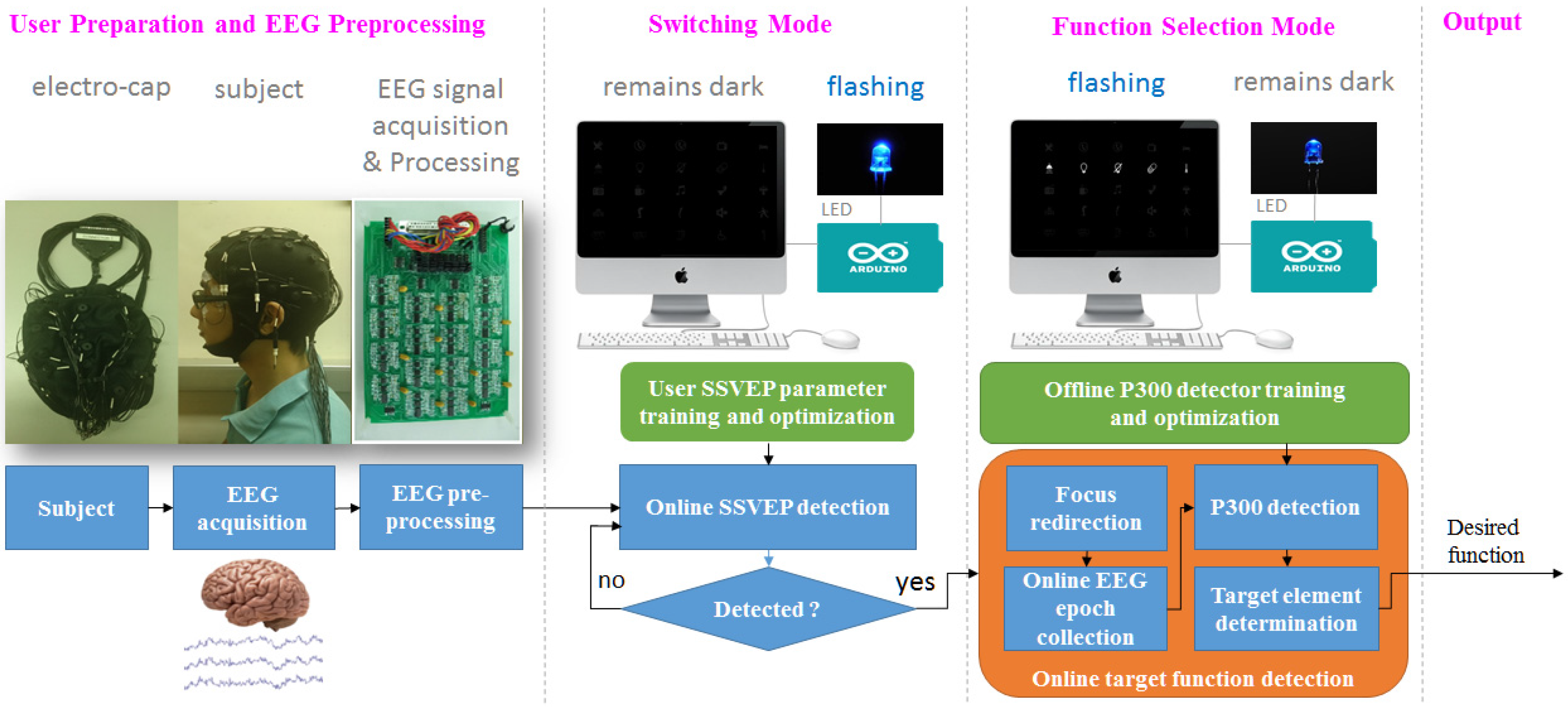
2. Overview of the Healthcare BCI System
3. Methods
3.1. EEG Acquisition and Preprocessing
3.2. Switching Mode
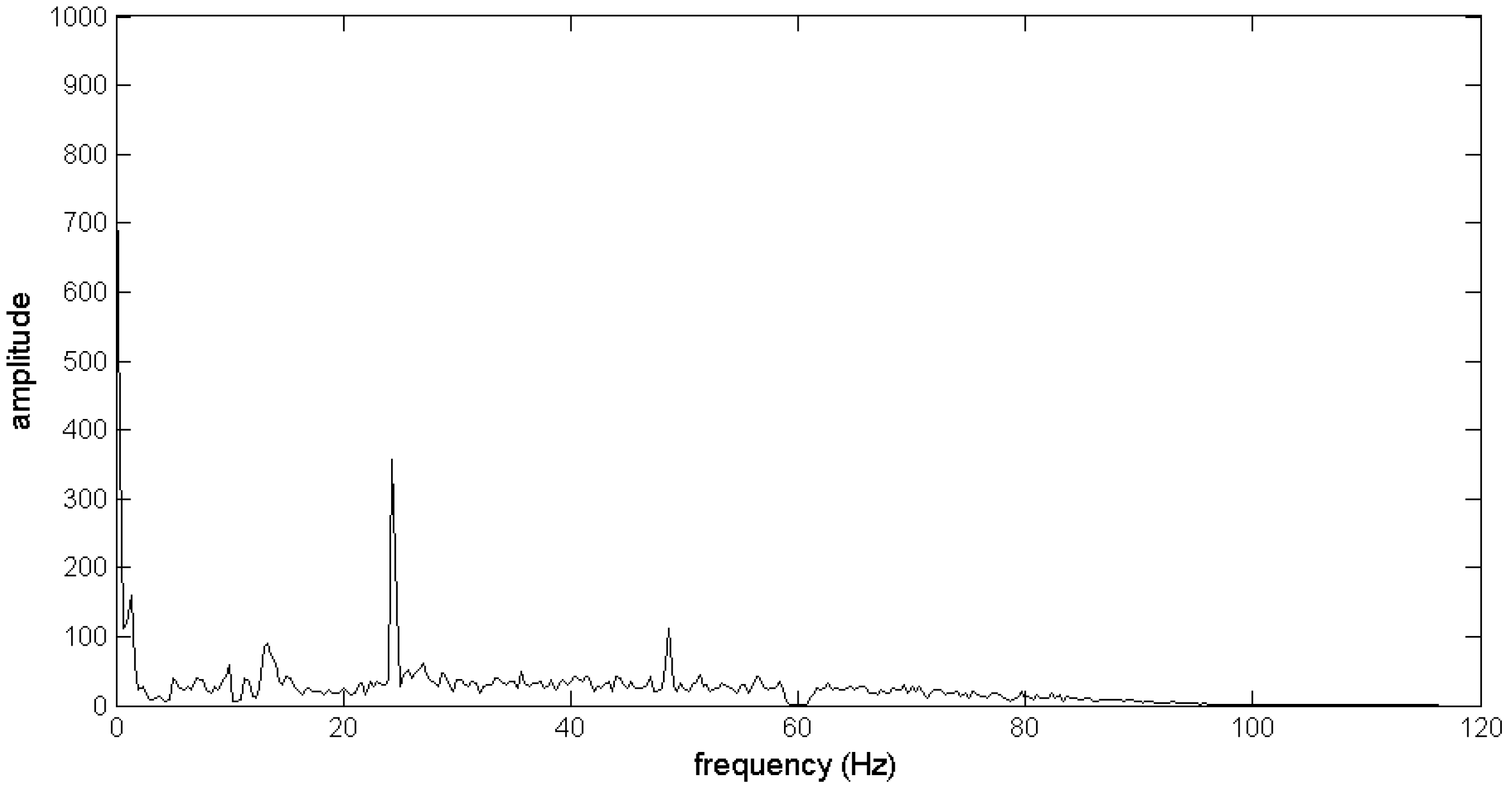
3.2.1. Online SSVEP Detection
3.2.2. SSVEP Parameter Training and Optimization
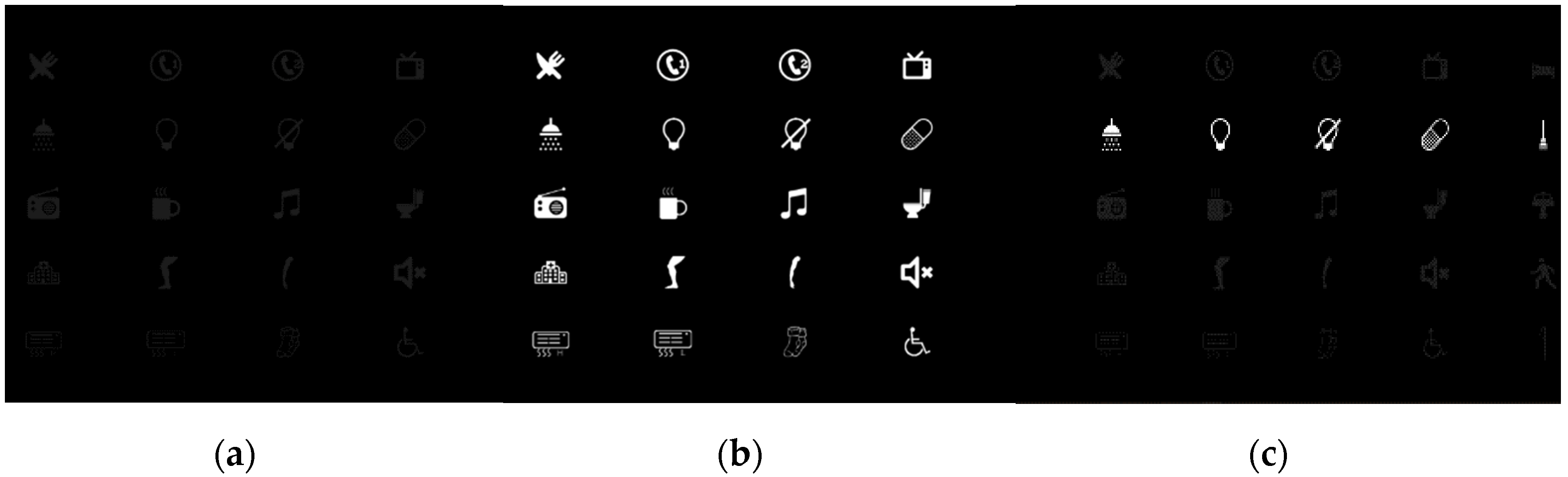
3.3. Function Selection Mode
3.3.1. Offline P300 Detector Training and Optimization
EEG Training Data Collection and Labeling
P300 Detector – Kernel FDA Training and Testing
P300 Detector – SVM Training and Testing
P300 Detector – Optimization
3.3.2. Online Target Function Detection
4. Results and Discussion
4.1. SSVEP Detection Results
4.2. P300 Detection Results
4.3. Comparison with Other P300 Detectors
4.3.1. FLDA
4.3.2. BLDA
4.3.3. Gradient Boosting with OLS
- Step 1: Set
- Step 2: Initialize
- Step 3: For m = 1 to M do
- a)
- b)
- c)
- d)
- e)
- Compute
4.3.4. Results
4.4. Comparison with Other Works
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wolpaw, J.R.; Birbaumer, N.; Heetderks, W.J.; McFarland, D.J.; Peckham, P.H.; Schalk, G.; Donchin, E.; Quatrano, L.A.; Robinson, C.J.; Vaughan, T.M. Brain-computer interface technology: A review of the first international meeting. IEEE Trans. Rehabil. Eng. 2000, 8, 164–173. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain-computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Turnip, A.; Hong, K.-S. Classifying mental activities from EEG-P300 signals using adaptive neural network. Int. J. Innov. Comput. Inf. Control. 2012, 8, 6429–6443. [Google Scholar]
- Moghimi, S.; Kushki, A.; Guerguerian, A.M.; Chau, T. A review of EEG-based brain-computer interfaces as access pathways for individuals with severe disabilities. Assist. Technol. 2013, 25, 99–110. [Google Scholar] [CrossRef] [PubMed]
- Naseer, N.; Hong, K.-S. fNIRS-based brain-computer interfaces: A review. Front. Hum. Neurosci. 2015, 9, 1–15. [Google Scholar]
- Khan, M.J.; Hong, K.-S. Passive BCI based on drowsiness detection: An fNIRS study. Biomed. Opt. Express 2015, 6, 4063–4078. [Google Scholar] [CrossRef] [PubMed]
- Weyand, S.; Takehara-Nishiuchi, K.; Chau, T. Weaning off mental tasks to achieve voluntary self-regulatory control of a Near-Infrared Spectroscopy Brain-Computer Interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 548–561. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.J.; Hong, M.J.; Hong, K.-S. Decoding of four movement directions using hybrid NIRS-EEG brain-computer interface. Front. Hum. Neurosci. 2014, 8, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Hyder, F.; Kida, I.; Behar, K.L.; Kennan, R.P.; Maciejewski, P.K.; Rothman, D.L. Quantitative functional imaging of the brain: Towards mapping neuronal activity by BOLD fMRI. NMR Biomed. 2001, 14, 413–431. [Google Scholar] [CrossRef] [PubMed]
- Shulman, R.G.; Rothman, D.L.; Hyder, F. A BOLD search for baseline. Neuroimage 2007, 36, 277–281. [Google Scholar] [CrossRef] [PubMed]
- Rebsamen, B.; Guan, C.; Zhang, H.; Wang, C.; Teo, C.; Ang, M.H., Jr.; Burdet, E. A brain controlled wheelchair to navigate in familiar environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 590–598. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Long, J.; Yu, T.; Yu, Z.; Wang, C.; Zhang, H.; Guan, C. An EEG-based BCI system for 2-D cursor control by combining mu/beta rhythm and P300 potential. IEEE Trans. Biomed. Eng. 2010, 57, 2495–2505. [Google Scholar] [PubMed]
- Donchin, E.; Spencer, K.M.; Wijesinghe, R. The mental prosthesis: Assessing the speed of a P300-based brain-computer interface. IEEE Trans. Rehabil. Eng. 2000, 8, 174–179. [Google Scholar] [CrossRef] [PubMed]
- Castermans, T.; Duvinage, M.; Petieau, M.; Hoellinger, T.; Saedeleer, C.; Seetharaman, K.; Bengoetxea, A.; Cheron, G.; Dutoit, T. Optimizing the performances of a P300-based brain–computer interface in ambulatory conditions. IEEE J. Emerg. Sel. Top. Circuits Syst. 2011, 1, 566–577. [Google Scholar] [CrossRef]
- Ma, R.; Aghasadeghi, N.; Jarzebowski, J.; Bretl, T.; Coleman, T.P. A stochastic control approach to optimally designing hierarchical flash sets in P300 communication prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 102–112. [Google Scholar] [PubMed]
- Khosrowabadi, R.; Quek, C.; Ang, K.K.; Wahab, A. ERNN: A biologically inspired feedforward neural network to discriminate emotion from EEG signal. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 609–629. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.H.; Wu, C.T.; Cheng, W.T.; Hsiao, Y.T.; Chen, P.M.; Teng, J.T. Emotion recognition from single trial EEG based on kernel Fisher’s emotion pattern and imbalanced quasiconformal kernel support vector machine. Sensors 2014, 14, 13361–13388. [Google Scholar] [CrossRef] [PubMed]
- Panicker, R.C.; Puthusserypady, S.; Sun, Y. An asynchronous P300 BCI with SSVEP-based control state detection. IEEE Trans. Biomed. Eng. 2011, 58, 1781–1788. [Google Scholar] [CrossRef] [PubMed]
- Meng, L.; Jin, J.; Wang, X. A comparison of three electrode channels selection methods applied to SSVEP BCI. IEEE Trans. Biomed. Eng. Inform. 2011, 1, 584–587. [Google Scholar]
- Combaz, A.; Van Hulle, M.M. Simultaneous detection of P300 and steady-state visually evoked potentials for hybrid brain-computer interface. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Yin, E.W.; Zhou, Z.T.; Jiang, J.; Chen, F.L.; Liu, Y.D.; Hu, D.W. A speedy hybrid BCI spelling approach combining P300 and SSVEP. IEEE Trans. Biomed. Eng. 2014, 61, 473–483. [Google Scholar] [PubMed]
- Beverina, F.; Palmas, G.; Silvoni, S.; Piccione, F.; Giove, S. User adaptive BCIs: SSVEP and P300 based interfaces. PsychNol. J. 2003, 1, 331–354. [Google Scholar]
- Regan, D. Human Brain Electrophysiology: Evoked Potentials and Evoked Magnetic Fields in Science and Medicine; Elsevier: New York, NY, USA, 1989. [Google Scholar]
- Thulasidas, M.; Guan, C.; Wu, J. Robust classification of EEG signal for brain-computer interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.P.; Liu, Y.H.; Lin, W.Z.; Kang, Z.H.; Cheng, C.A.; Huang, T.H. Development of a P300 brain–machine interface and design of an elastic mechanism for a rehabilitation robot. Int. J. Autom. Smart Technol. 2015, 5, 91–100. [Google Scholar]
- Lenhardt, A.; Kaper, M.; Ritter, H.J. An adaptive P300-based online brain-computer interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 21–130. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, U.; Garcia, G.; Vesin, J.-M.; Diserens, K.; Ebrahimi, T. A boosting approach to p300 detection with application to brain-computer interfaces. In Proceedings of the 2nd International IEEE EMBS Conference on Neural Engineering, Arlington, VA, USA, 16–19 March 2005; pp. 97–100.
- Hoffmann, U.; Vesin, J.-M.; Ebrahimi, T.; Diserens, K. An efficient p300-based brain–computer interface for disabled subjects. J. Neurosci. Methods 2008, 167, 115–125. [Google Scholar] [CrossRef] [PubMed]
- Rivet, B.; Souloumiac, A.; Attina, V.; Gibert, G. xDAWN algorithm to enhance evoked potentials: application to brain–computer interface. IEEE Trans. Biomed. Eng. 2009, 56, 2035–2043. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rakotomamonjy, A.; Guigue, V. BCI competition III: Dataset II- ensemble of SVMs for BCI p300 speller. IEEE Trans. Biomed. Eng. 2008, 55, 1147–1154. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.H.; Huang, H.P.; Huang, T.H.; Kang, Z.H.; Teng, J.T. A brain-controlled rehabilitation system with multiple kernel learning. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Anchorage, AK, USA, 9–12 October 2011.
- Liu, Y.H.; Chen, Y.T. Face recognition using total margin-based adaptive fuzzy support vector machines. IEEE Trans. Neural Netw. 2007, 18, 178–192. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.F.; Liao, H.-Y.M.; Ko, M.T.; Lin, J.C.; Yu, G.J. A new LDA-based face recognition system which can solve the small sample size problem. Pattern Recognit. 2000, 33, 1713–1726. [Google Scholar] [CrossRef]
- Liu, Y.H.; Huang, H.P.; Weng, C.H. Recognition of electromyographic signals using cascaded kernel learning machine. IEEE/ASME Trans. Mechatron. 2007, 12, 253–264. [Google Scholar] [CrossRef]
- Yin, E.W.; Zeyl, T.; Saab, R.; Chau, T.; Hu, D.W.; Zhou, Z.T. A hybrid brain-computer interface based on the fusion of P300 and SSVEP scores. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 693–701. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.X.; Zhang, Y.; Cichocki, A.; Matsuno, F. A novel EOG/EEG hybrid human-machine interface adopting eye movements and ERPs: Application to robot control. IEEE Trans. Biomed. Eng. 2015, 62, 876–889. [Google Scholar] [CrossRef] [PubMed]
- Panicker, R.C.; Puthusserypady, S.; Sun, Y. Adaptation in P300 brain-computer interfaces: A two-classifier cotraining approach. IEEE Trans. Biomed. Eng. 2010, 57, 2927–2935. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baudat, G.; Anouar, F. Generalized discriminant analysis using a kernel approach. Neural Comput. 2000, 12, 2385–2404. [Google Scholar] [CrossRef] [PubMed]
- Shyu, K.K.; Chiu, Y.J.; Lee, P.L.; Liang, J.M.; Peng, S.H. Adaptive SSVEP-based BCI system with frequency and pulse duty-cycle stimuli tuning design. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 697–703. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.H.; Liu, Y.C.; Chen, Y.J. Fast support vector data descriptions for novelty detection. IEEE Trans. Neural Netw. 2010, 21, 1296–1313. [Google Scholar] [PubMed]
- Friedmann, J.H.; Hastie, T.; Tibshirani, R. Additive logistic regression: A statistical view of boosting. Ann. Statist. 2000, 28, 337–407. [Google Scholar] [CrossRef]
- Gao, J.F.; Tian, H.J.; Yang, Y.; Yu, X.L.; Li, C.H.; Rao, N.N. A novel algorithm to enhance P300 in single trials: Application to lie detection using F-Score and SVM. PLoS ONE 2014, 9. [Google Scholar] [CrossRef] [PubMed]
- Turnip, A.; Hong, K.-S.; Jeong, M.-Y. Real-time feature extraction of EEG-based P300 using adaptive nonlinear principal component analysis. Biomed. Eng. Online 2011, 10, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Y.J.; Luo, Y.; Huang, W.T.; Zhang, W.J.; Yang, Y.; Gao, J.F. A novel classification method based on ICA and ELM: A case study in lie detection. Bio-Med. Mater. Eng. 2014, 24, 357–363. [Google Scholar]
- Gonzalez, A.; Nambu, I.; Hokari, H.; Wada, Y. EEG channel selection using particle swarm optimization for the classification of auditory event-related potentials. Sci. World J. 2014. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | d | C | ||
|---|---|---|---|---|
| 1 | 3 | 100 | 24 | 211 |
| 2 | 9 | 100 | 27 | 213 |
| 3 | 5 | 100 | 27 | 28 |
| 4 | 4 | 1000 | 22 | 211 |
| 5 | 7 | 100 | 28 | 212 |
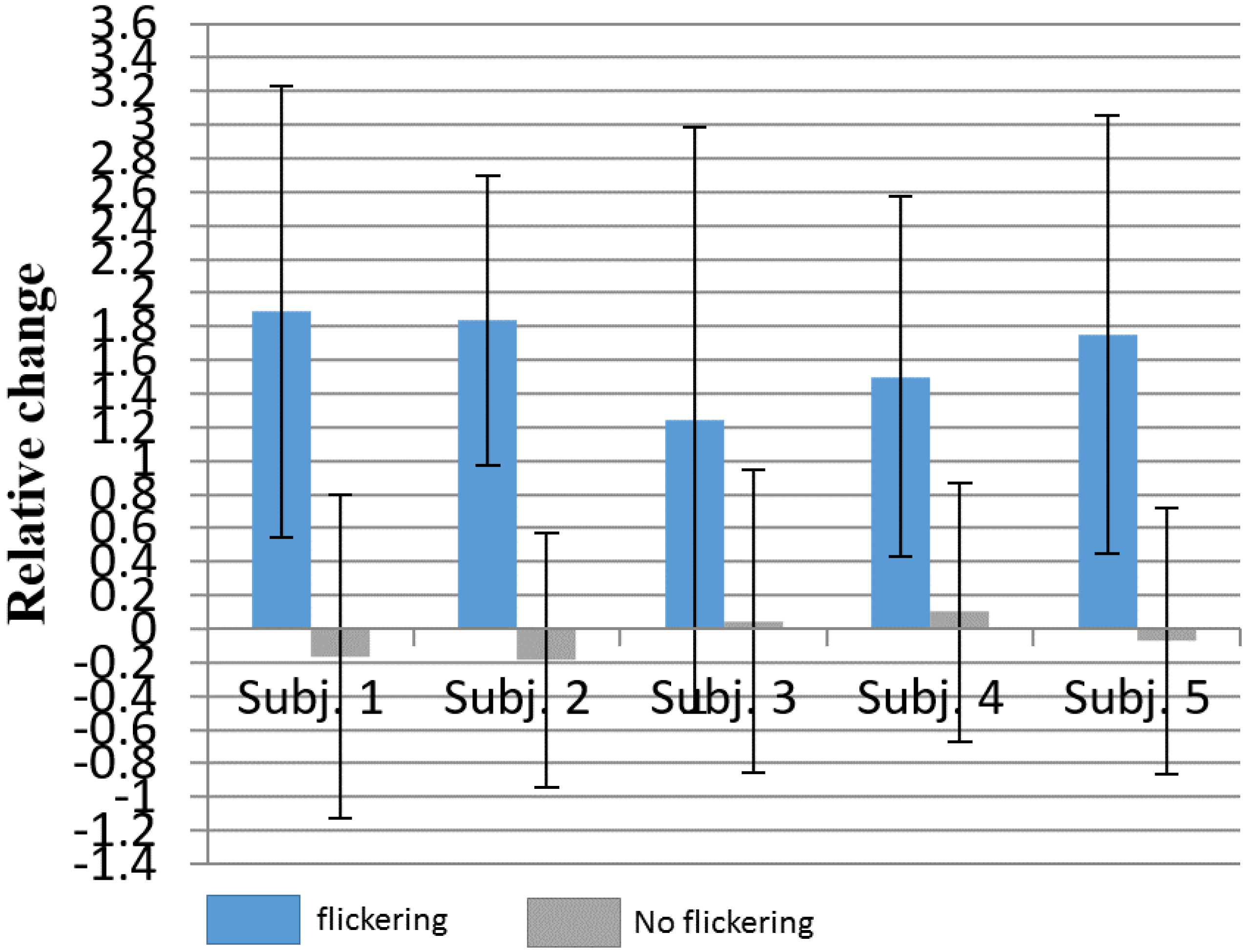
| Channel | Flickering | No Flickering | ||
|---|---|---|---|---|
| Average RC | Sd | Average RC | Sd | |
| O1 | 1.55 | 0.61 | −0.22 | 0.34 |
| Oz | 1.88 | 0.67 | −0.16 | 0.48 |
| O2 | 1.42 | 0.58 | −0.27 | 0.41 |
| Results | Sub1 | Sub2 | Sub3 | Sub4 | Sub5 | Average |
|---|---|---|---|---|---|---|
| TPR | 100% | 95% | 75% | 100% | 95% | 93% |
| FPR | 10% | 5% | 20% | 20% | 15% | 14% |
| Best Combination | Sub1 | Sub2 | Sub3 | Sub4 | Sub5 |
|---|---|---|---|---|---|
| Flickering Frequency (Hz) | 22.72 | 24.39 | 23.26 | 24.39 | 21.74 |
| Duty Cycle (%) | 70 | 70 | 30 | 10 | 50 |
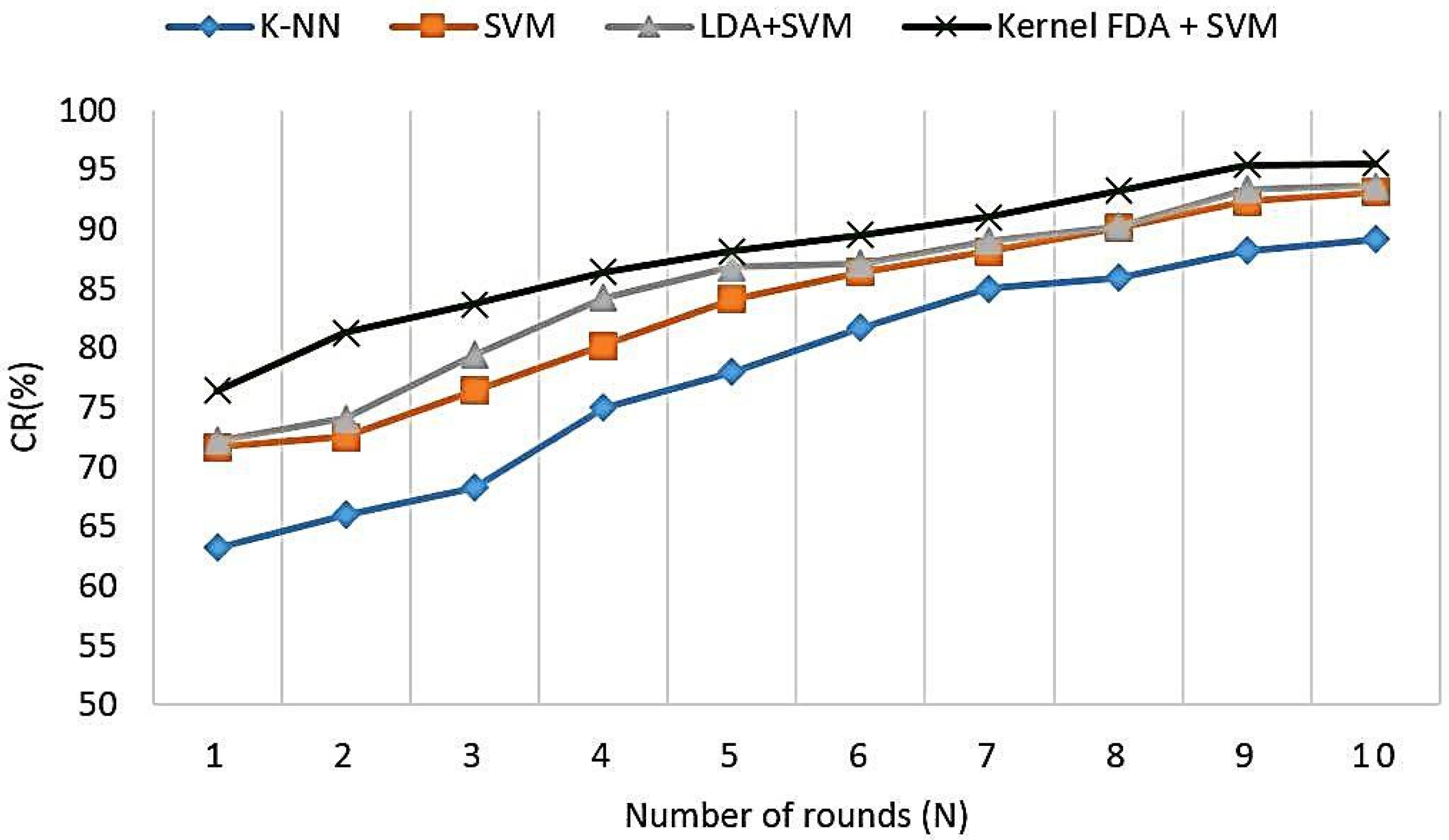
| P300 Detectors | N = 1 | N = 2 | N = 3 | N = 4 | N = 5 | N = 6 | N = 7 | N = 8 | N = 9 | N = 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| K-NN | 63.2 | 66.1 | 68.3 | 75.0 | 78.1 | 81.7 | 85.0 | 85.9 | 88.2 | 89.1 |
| SVM | 71.7 | 72.5 | 76.4 | 80.2 | 84.1 | 86.4 | 88.1 | 90.1 | 92.3 | 93.1 |
| FLDA | 64.1 | 65.8 | 69.7 | 75.3 | 77.8 | 82.7 | 85.4 | 87.2 | 88.7 | 90.3 |
| BLDA | 68.5 | 72.4 | 77.2 | 80.3 | 83.6 | 86.4 | 87.7 | 88.9 | 90.5 | 92.8 |
| Gradient boosting with OLS | 72.5 | 76.3 | 81.7 | 82.3 | 83.5 | 86.3 | 89.3 | 93.1 | 95.6 | 95.6 |
| Kernel FDA + SVM | 76.4 | 81.3 | 83.7 | 86.4 | 88.1 | 89.5 | 91.0 | 93.2 | 95.4 | 95.5 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.-H.; Wang, S.-H.; Hu, M.-R. A Self-Paced P300 Healthcare Brain-Computer Interface System with SSVEP-Based Switching Control and Kernel FDA + SVM-Based Detector. Appl. Sci. 2016, 6, 142. https://0-doi-org.brum.beds.ac.uk/10.3390/app6050142
Liu Y-H, Wang S-H, Hu M-R. A Self-Paced P300 Healthcare Brain-Computer Interface System with SSVEP-Based Switching Control and Kernel FDA + SVM-Based Detector. Applied Sciences. 2016; 6(5):142. https://0-doi-org.brum.beds.ac.uk/10.3390/app6050142
Chicago/Turabian StyleLiu, Yi-Hung, Shih-Hao Wang, and Ming-Ren Hu. 2016. "A Self-Paced P300 Healthcare Brain-Computer Interface System with SSVEP-Based Switching Control and Kernel FDA + SVM-Based Detector" Applied Sciences 6, no. 5: 142. https://0-doi-org.brum.beds.ac.uk/10.3390/app6050142