Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand

Abstract
:Featured Application
Abstract
1. Introduction
2. Previous Work
3. Materials and Methods
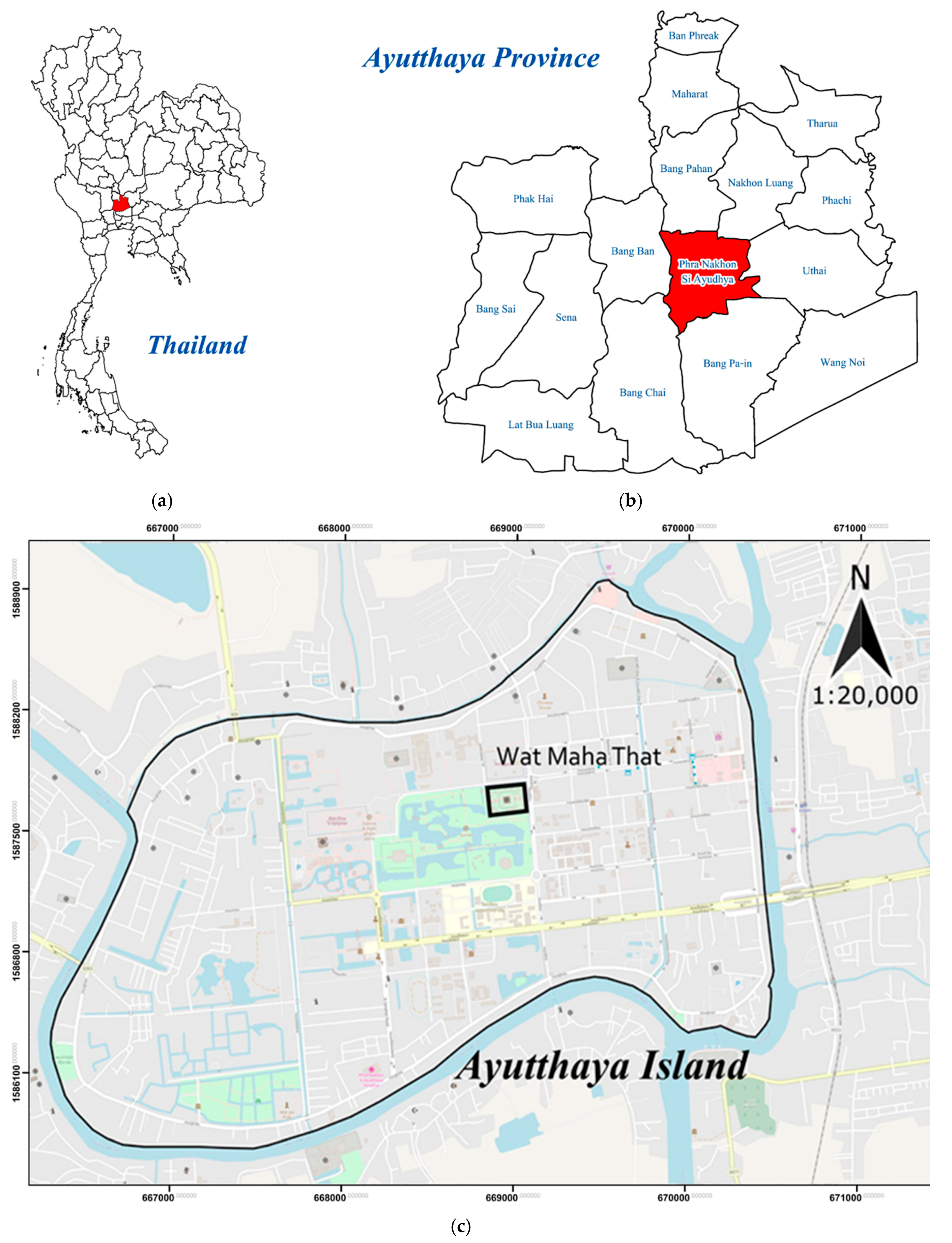
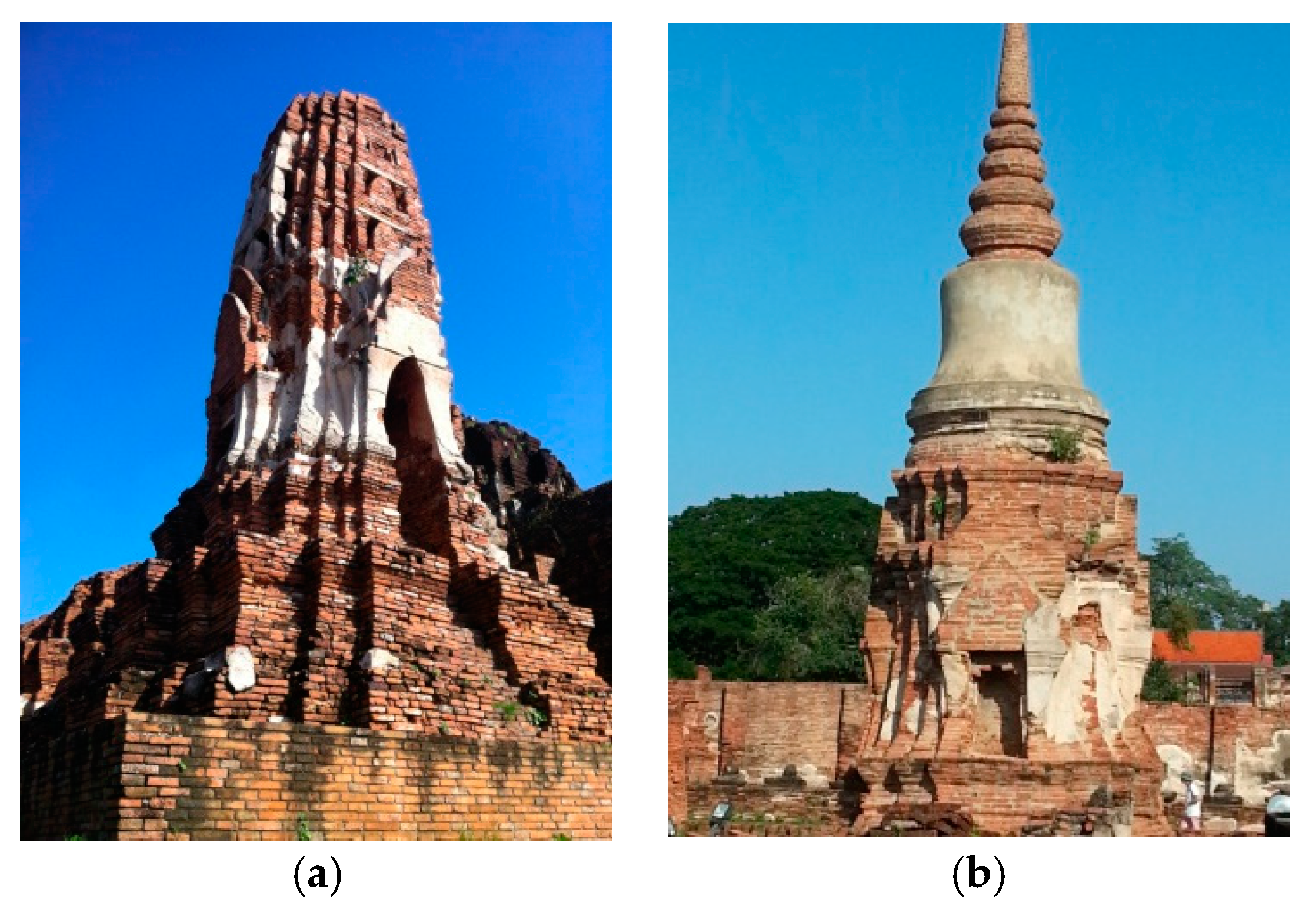
3.1. Cultural Heritage Sites: Wat Maha That, Thailand
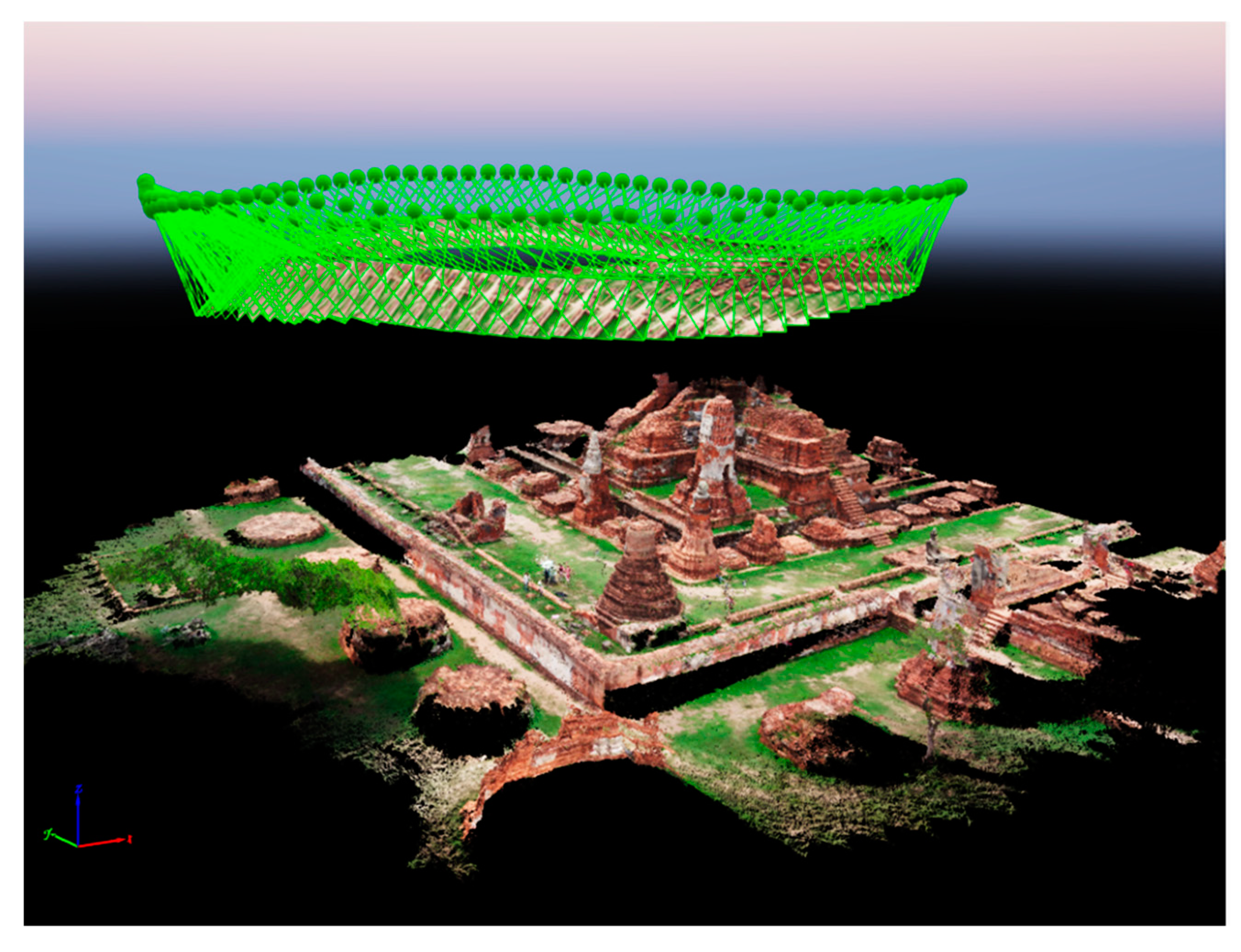
3.2. Image Acquisition Using UAVs
3.3. Flight Planning and Control
- A photogrammetric block is designed;
- The flight path of the strips, along with their forward and side overlaps, are established;
- The theoretical scale is determined using ground sample distance (GSD) calculations.
- The vertical deviation of the image must be controlled by monitoring the angle between the optical axis and the nadir direction at the projection center.
- Changes in direction and the drift effect must be controlled by monitoring the difference in the image coordinate system between the flight axis and the x-axis directions. In a planned flight, the theoretical value is 0° because the x-axis and the flight axis are in alignment.
- The scale must be controlled. During digital photogrammetric flights, the definition of theoretical scale depends on the pixel size that is projected to the ground. Maintaining a constant GSD requires the ground to be a plane, but this is rarely the case in practice. The GSD is therefore dependent on the flight altitude and ground elevation, and can be calculated at any given point using a digital elevation model. The main aim is therefore to obtain an estimate for the GSD for each image and for each strip, which will eventually provide the mean GSD for the entire photogrammetric block upon completion of the flight.
- The extent of the overlap must also be controlled. After calculating the scale and GSD, it is necessary to verify the forward and side overlaps that rise between images and between strips (Figure 5). This is essential, owing to the high degree of correlation between the altitude, GSD, and overlap values. The control of overlap depends on the verification of the side overlap between images and strips, and the forward overlap found between sequential images and strips.
3.4. Reference Measurements
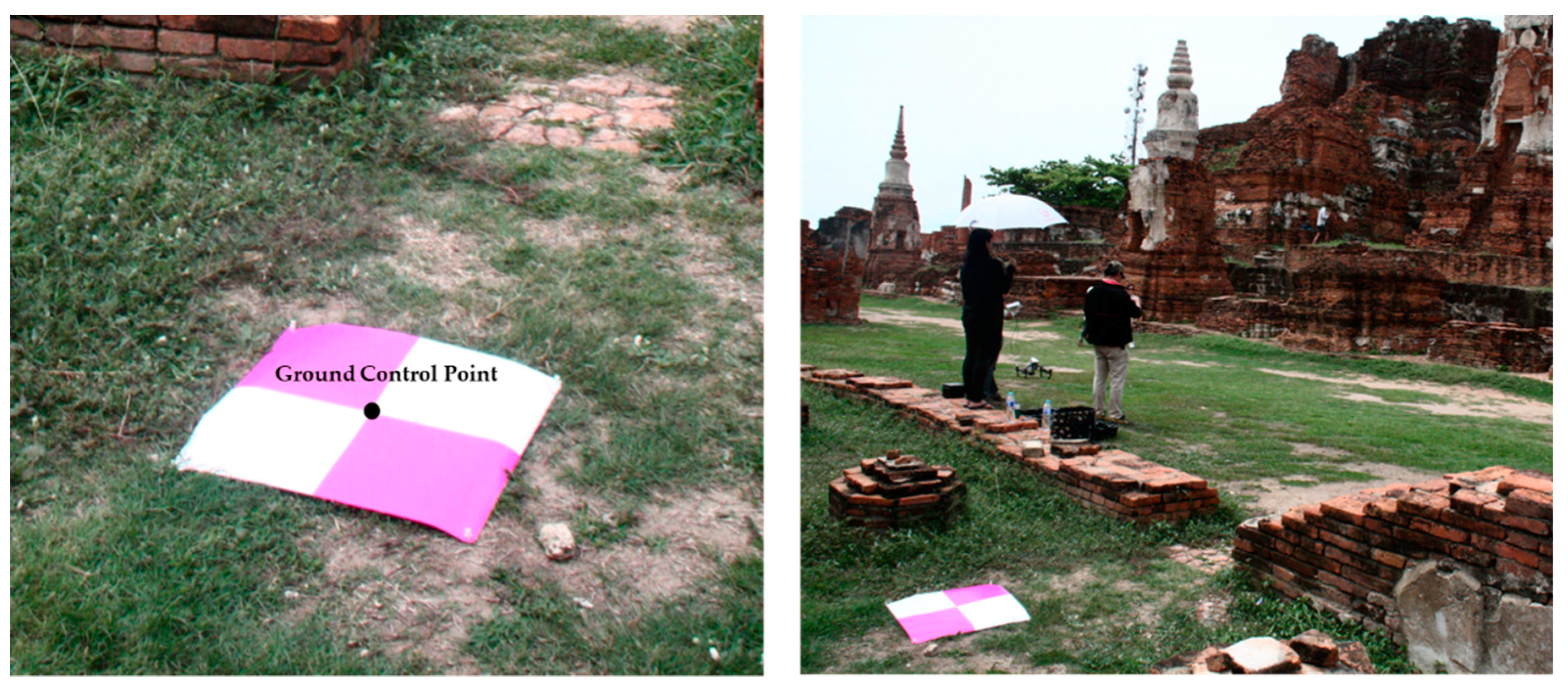
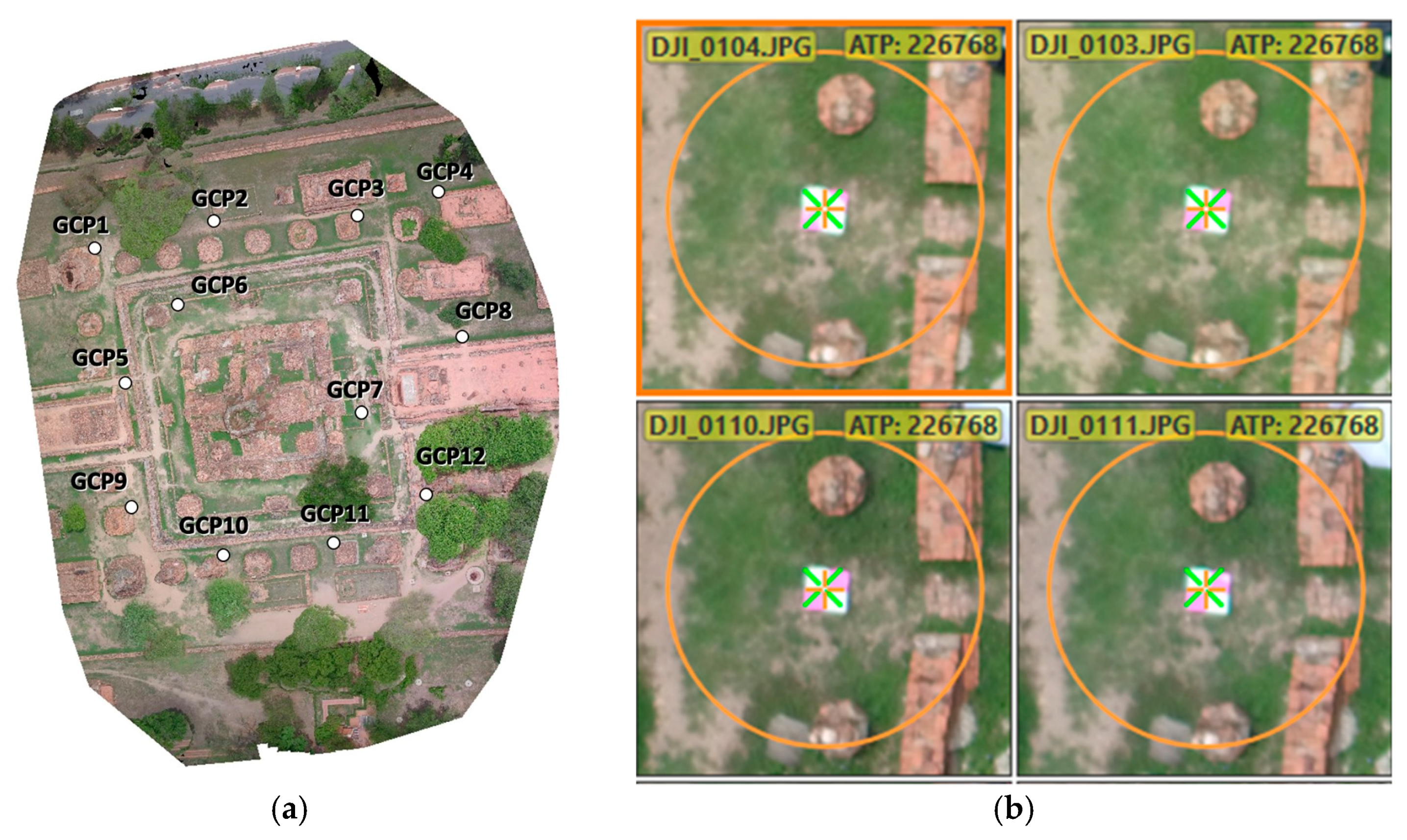
3.4.1. GCPs Measurements
3.4.2. Terrestrial Laser Scanning
3.5. Image Processing
3.5.1. UAV Image Processing
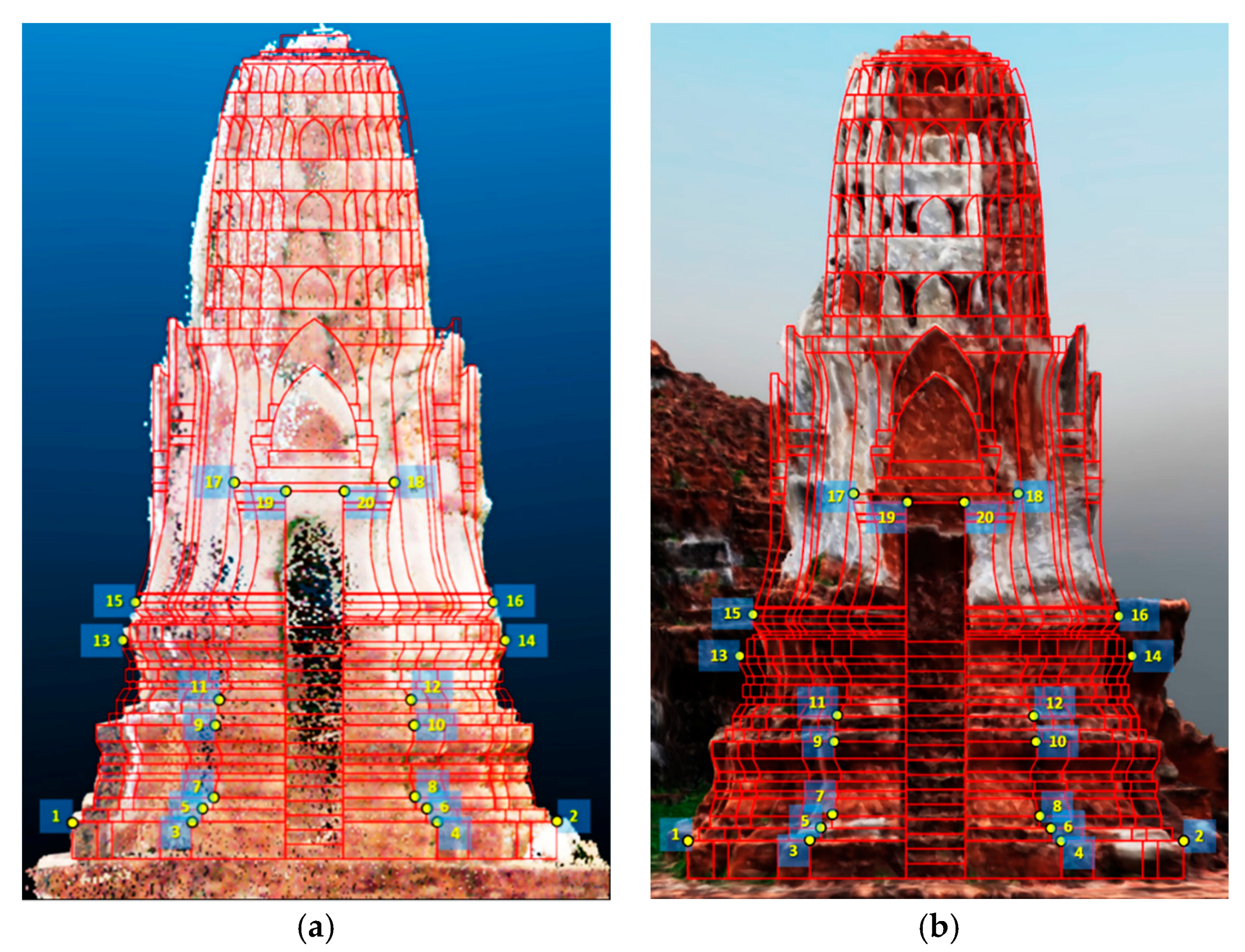
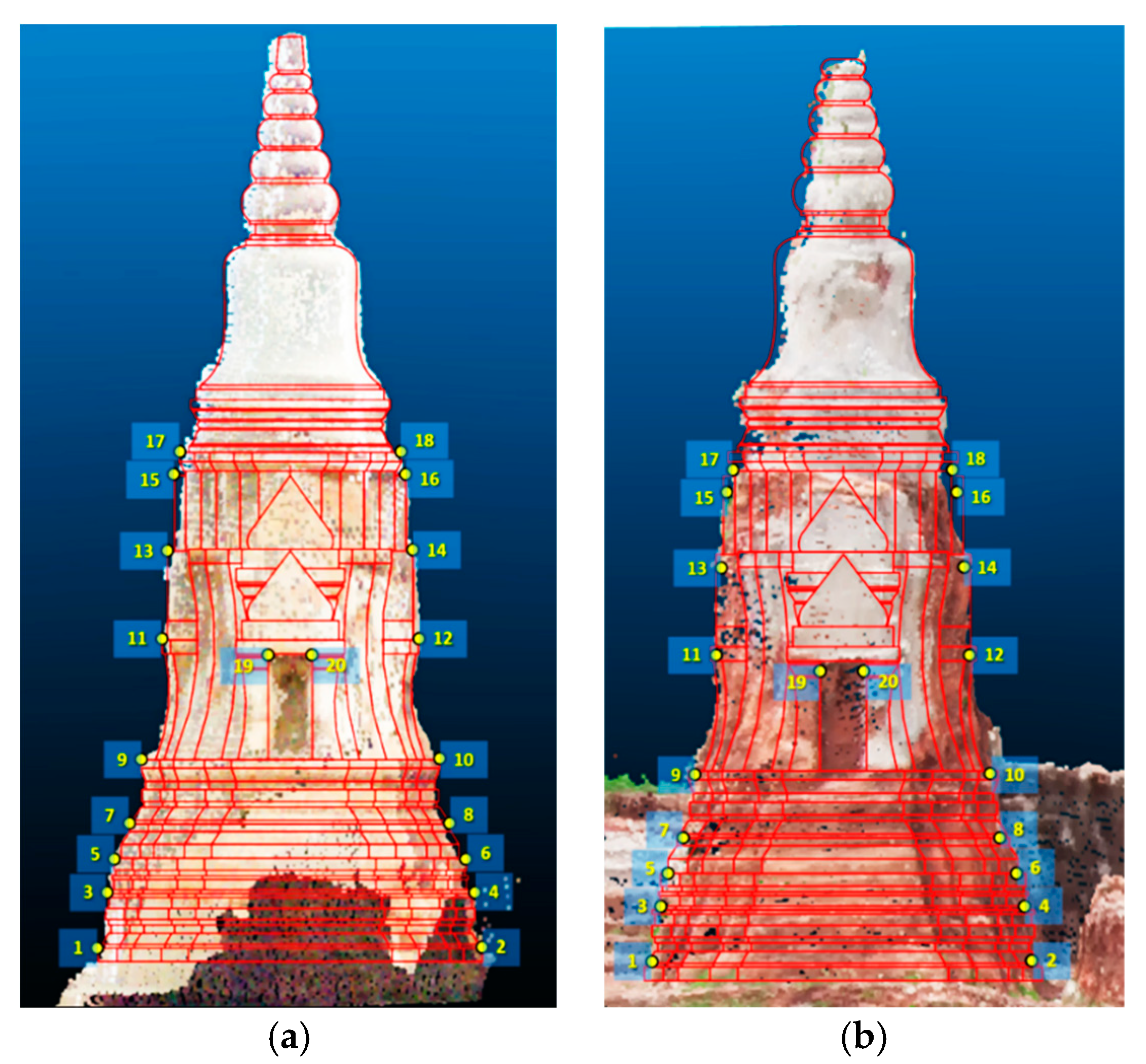
3.5.2. 3D Pagoda Models Comparison
4. Results
- is the root–mean–square error
- is the point coordinates in the UAV images.
- is the point coordinate measured from RTK.
- is the number of GCPs
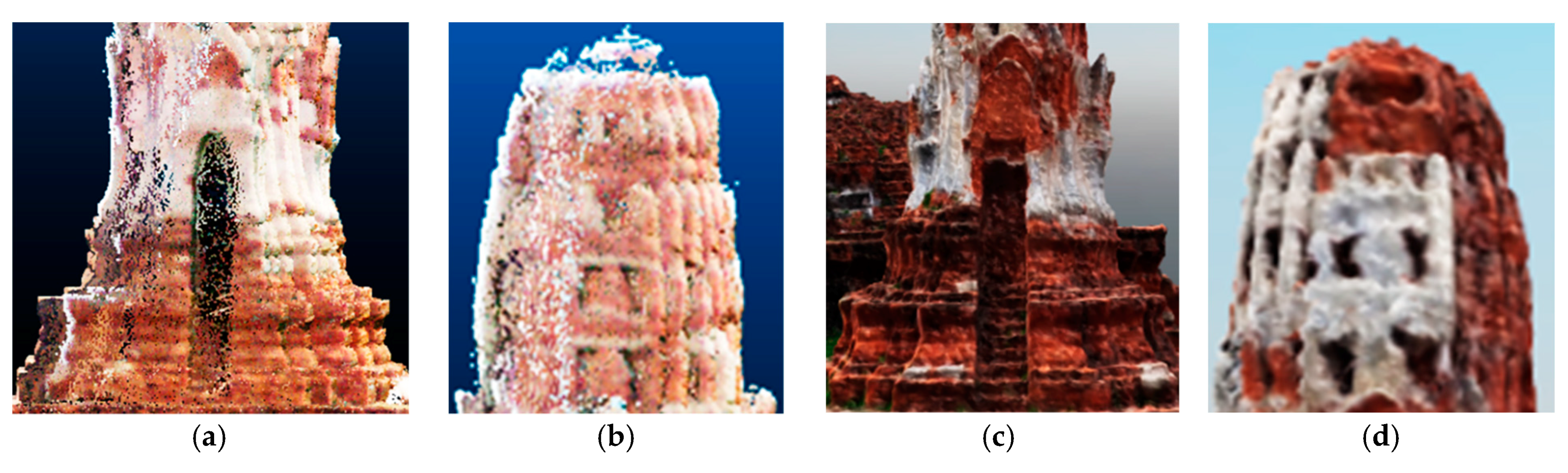
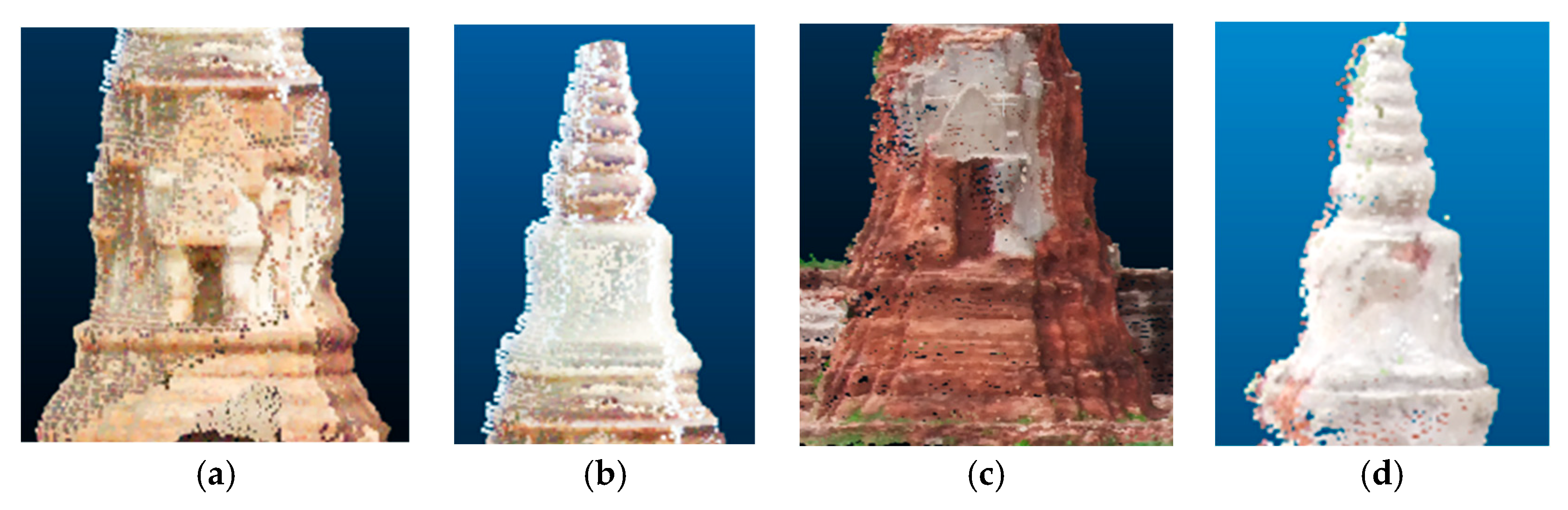
4.1. First Case Study: Prang Structure
4.2. Second Case Study: Chedi Structure
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Discamps, E.; Muth, X.; Gravina, B.; Lacrampe-Cuyaubère, F.; Chadelle, J.; Faivre, J.; Maureille, B. Photogrammetry as a tool for integrating archival data in archaeological fieldwork: Examples from the Middle Palaeolithic sites of Combe-Grenal, Le Moustier, and Regourdou. J. Archaeol. Sci. Rep. 2016, 8, 268–276. [Google Scholar] [CrossRef]
- Xu, Z.H.; Wu, L.X.; Shen, Y.L.; Li, F.X.; Wang, Q.Z.; Wang, R. Tridimensional reconstruction applied to cultural heritage with the use of camera-Equipped UAV and terrestrial laser scanner. J. Remote Sens. 2014, 6, 10413–10414. [Google Scholar] [CrossRef]
- Erenoglu, R.C.; Akcay, O.; Erenoglu, O. An UAS-Assisted multi-Sensor approach for 3D modeling and reconstruction of cultural heritage site. J. Cult. Herit. 2017, 26, 79–90. [Google Scholar] [CrossRef]
- O’Driscoll, J. Landscape applications of photogrammetry using unmanned aerial vehicles. J. Archaeol. Sci. Rep. 2018, 22, 32–44. [Google Scholar] [CrossRef]
- Themistocleous, K. Model reconstruction for 3-D vizualization of cultural heritage sites using open data from social media: The case study of Soli, Cyprus. J. Archaeol. Sci. Rep. 2017, 14, 774–781. [Google Scholar] [CrossRef]
- Young, H.J.; Seonghyuk, H. Three-Dimensional Digital Documentation of Cultural Heritage Site Based on the Convergence of Terrestrial Laser Scanning and Unmanned Aerial Vehicle Photogrammetry. ISPRS Int. J. Geo-Inf. 2019, 8, 53. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Sayab, M.; Aerden, D.; Paananen, M.; Saarela, P. Virtual structural analysis of jokisivu open pit using ‘structure-from-motion’ unmanned aerial vehicles (UAV) photogrammetry: Implications for structurally-Controlled gold deposits in southwest Finland. Remote Sens. 2018, 10, 1296. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft—Archaeological three-Dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Aerial Data Systems, Fixed-Wing UAV. 2016. Available online: http://aerialdatasystems.com/fixed-wing (accessed on 17 January 2019).
- Fallavollita, P.; Balsi, M.; Esposito, S.; Melis, M.G.; Milanese, M.; Luca, Z. UAS for Archaeology. New Perspectives on Aerial Documentation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 4–6. [Google Scholar] [CrossRef]
- Olson, K.G.; Rouse, L.M. A Beginner’s Guide to Mesoscale Survey with Quadrotor-UAV Systems. Adv. Archaeol. Pract. 2018, 6, 357–371. [Google Scholar] [CrossRef]
- Xia, D.; Cheng, L.; Yao, Y. A Robust Inner and Outer Loop Control Method for Trajectory Tracking of a Quadrotor. Sensors 2017, 17, 2147. [Google Scholar] [CrossRef] [PubMed]
- Dong, J.; He, B. Novel Fuzzy PID-Type Iterative Learning Control for Quadrotor UAV. Sensors 2018, 19, 24. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Hernandez, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Mancera-Taboada, J. Image-Based modelling from unmanned aerial vehicle (UAV) photogrammetry: An effective, low-Cost tool for archaeological applications. Archaeometry 2015, 57, 128–145. [Google Scholar] [CrossRef]
- Lo Brutto, M.; Garraffa, A.; Meli, P. UAV Platforms for Cultural Heritages Survey: First Results. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2. [Google Scholar] [CrossRef]
- Nadhirah, H.M.N.; Khairul, N.T. 3D Model Generation from UAV: Historical Mosque (Masjid Lama Nilai). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 251. [Google Scholar]
- Ebolese, D.; Lo Brutto, M.; Dardanelli, G. UAV survey for the archaeological map of Lilybaeum (Marsala, Italy). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42. [Google Scholar] [CrossRef]
- Chiabrando, F.; Nex, F.; Piatti, D.; Rinaudo, F. UAV and RPV systems for photogrammetric surveys in archaelogical areas: Two tests in the Piedmont region (Italy). J. Arch. Sci. 2011, 38, 697–710. [Google Scholar] [CrossRef]
- Stek, T.D. Drones over Mediterranean landscapes. The potential of small UAV’s (drones) for site detection and heritage management in archaeological survey projects: A case study from Le Pianelle in the Tappino Valley, Molise (Italy). J. Cult. Herit. 2016, 22, 1066–1071. [Google Scholar] [CrossRef]
- Bolognesi, M.; Furini, A.; Russob, V.; Pellegrinelli, A.; Russo, P. Accuracy of Cultural Heritage 3D Models by RPAS and Terrestrial Photogrammetry. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 113–119. [Google Scholar] [CrossRef]
- Cho, G.; Hildebrand, A.; Claussen, J.; Cosyn, P.; Morris, S. Pilotless aerial vehicle systems: Size, scale and functions. Coordinates 2013, 9, 8–16. [Google Scholar]
- Petrie, G. Commercial operation of lightweight UAVs for aerial imaging and mapping. Geoinformatics 2013, 16, 28–39. [Google Scholar]
- Remondino, F.; Nocerino, E.; Toschi, I.; Menna, F. A critical review of automated photogrammetric processing of large datasets. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 591–599. [Google Scholar] [CrossRef]
- Themistocleous, K.; Agapiou, A.; Cuca, B.; Hadjimitsis, D.G. Unmanned Aerial Systems and Spectroscopy for Remote Sensing Application in Archaeology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV Photogrammetry for Mapping and 3D Modeling-Current Status and Future Perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 25–31. [Google Scholar] [CrossRef]
- Ioannides, M.; Hadjiprocopis, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E.; Makantasis, K.; Santos, P.; Fellner, D.; Stork, A.; Balet, O.; et al. Online 4D Reconstruction using multi-Images available under open access. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 169–174. [Google Scholar] [CrossRef]
- Koch, T.; Zhuo, X.; Reinartz, P.; Fraundorfer, F. A new paradigm for matching UAV and aerial images. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 83–90. [Google Scholar] [CrossRef]
- Ayutthaya Historical Research. Available online: http://www.ayutthaya-history.com/Temples_Ruins_MahaThat.html (accessed on 16 January 2019).
- Sanz-Ablanedo, E.; Chandler, J.; Rodríguez-Pérez, J.; Ordóñez, C.; Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-Based topographic change detection with structure-From-Motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Area of flight | 1 ha | Baseline, b | 32 m |
| Scale, S | 1:50 | Overlap, p | 80% |
| GSD | 20 mm | Sidelap, q | 40% |
| Footprint | 80 × 60 m | Spacing between strips, t | 36 m |
| Flight height, H | 50 m | Number of strips | 3 |
| Orientation of strips | West–East | Image per strip | 10 |
| GCP | Field Survey Data | Diff | ||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | dX (m) | dY (m) | Z (m) | |
| 1 | 669082.4191 | 1587840.2374 | 17.9260 | 0.021 | −0.009 | 0.043 |
| 2 | 669064.9475 | 1587827.1337 | 19.0470 | −0.012 | 0.012 | −0.036 |
| 3 | 669010.3487 | 1587839.8734 | 18.5760 | 0.028 | −0.029 | −0.049 |
| 4 | 668978.6815 | 1587827.1337 | 18.1510 | 0.008 | 0.009 | −0.086 |
| 5 | 668983.0494 | 1587790.0066 | 18.5300 | 0 | −0.001 | 0.021 |
| 6 | 668996.8810 | 1587807.1142 | 18.2430 | 0 | 0.001 | −0.081 |
| 7 | 669056.5757 | 1587778.3588 | 18.2350 | 0.047 | 0.003 | 0.026 |
| 8 | 669086.0590 | 1587798.7424 | 19.3790 | −0.027 | 0 | 0.068 |
| 9 | 668984.1413 | 1587740.1397 | 20.1880 | 0.051 | −0.040 | −0.012 |
| 10 | 669018.7205 | 1587733.2239 | 19.8580 | 0.001 | 0 | −0.057 |
| 11 | 669052.2078 | 1587737.2278 | 19.2190 | 0 | 0.001 | 0.021 |
| 12 | 669089.3349 | 1587739.7757 | 17.0110 | 0 | 0.001 | −0.062 |
| RMSE H = sqrt (sum(dX)2 + (sum(dY)2/n) | 0.028 m | |||||
| RMSE V= sqrt (sum(dZ)2/n) | 0.052 m | |||||
| Terrestrial | UAV | |
|---|---|---|
| RMSE H (m) | 0.068 | 0.066 |
| RMSE V (m) | 0.030 | 0.054 |
| Terrestrial | UAV | |
|---|---|---|
| RMSE H (m) | 0.069 | 0.069 |
| RMSE V (m) | 0.022 | 0.021 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manajitprasert, S.; Tripathi, N.K.; Arunplod, S. Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand. Appl. Sci. 2019, 9, 3640. https://0-doi-org.brum.beds.ac.uk/10.3390/app9183640
Manajitprasert S, Tripathi NK, Arunplod S. Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand. Applied Sciences. 2019; 9(18):3640. https://0-doi-org.brum.beds.ac.uk/10.3390/app9183640
Chicago/Turabian StyleManajitprasert, Supaporn, Nitin K. Tripathi, and Sanit Arunplod. 2019. "Three-Dimensional (3D) Modeling of Cultural Heritage Site Using UAV Imagery: A Case Study of the Pagodas in Wat Maha That, Thailand" Applied Sciences 9, no. 18: 3640. https://0-doi-org.brum.beds.ac.uk/10.3390/app9183640