
Development of a Portable Interface System Sharing the Positioning and Heading Information to Support a Berthing Vessel



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
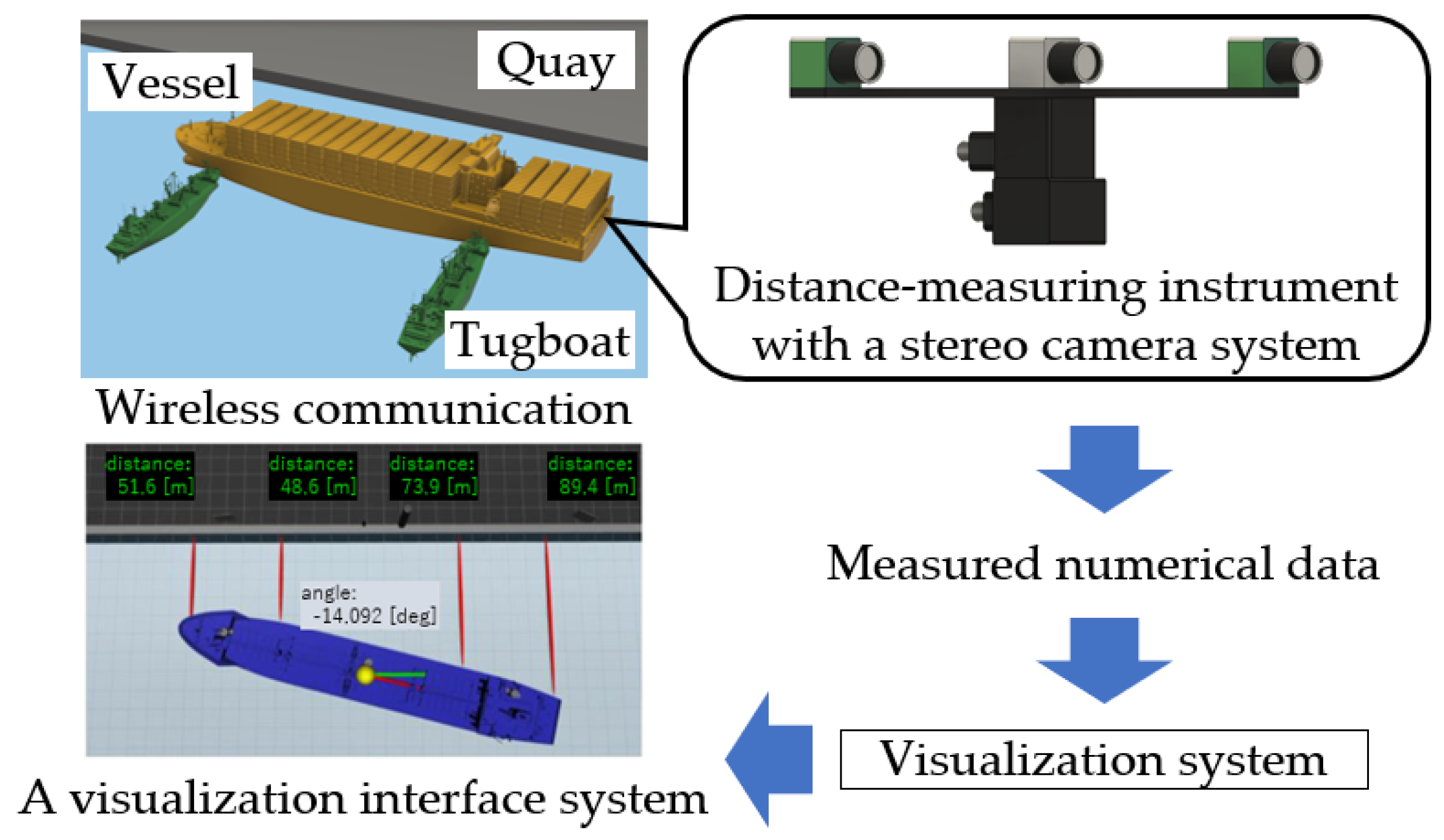
2. Visualization Related to the Quay
2.1. Positioning Estimation for a Berthing Vessel
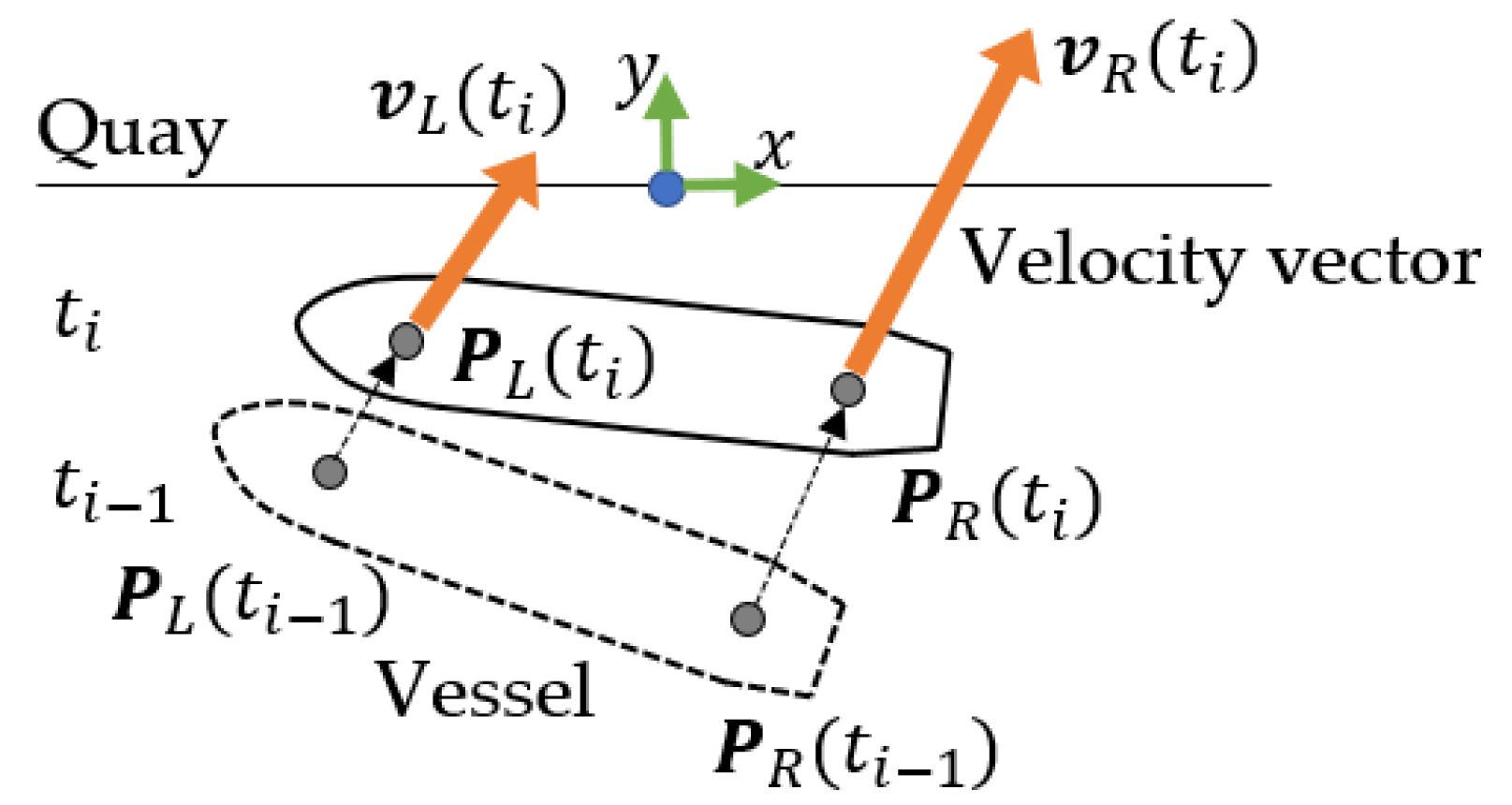
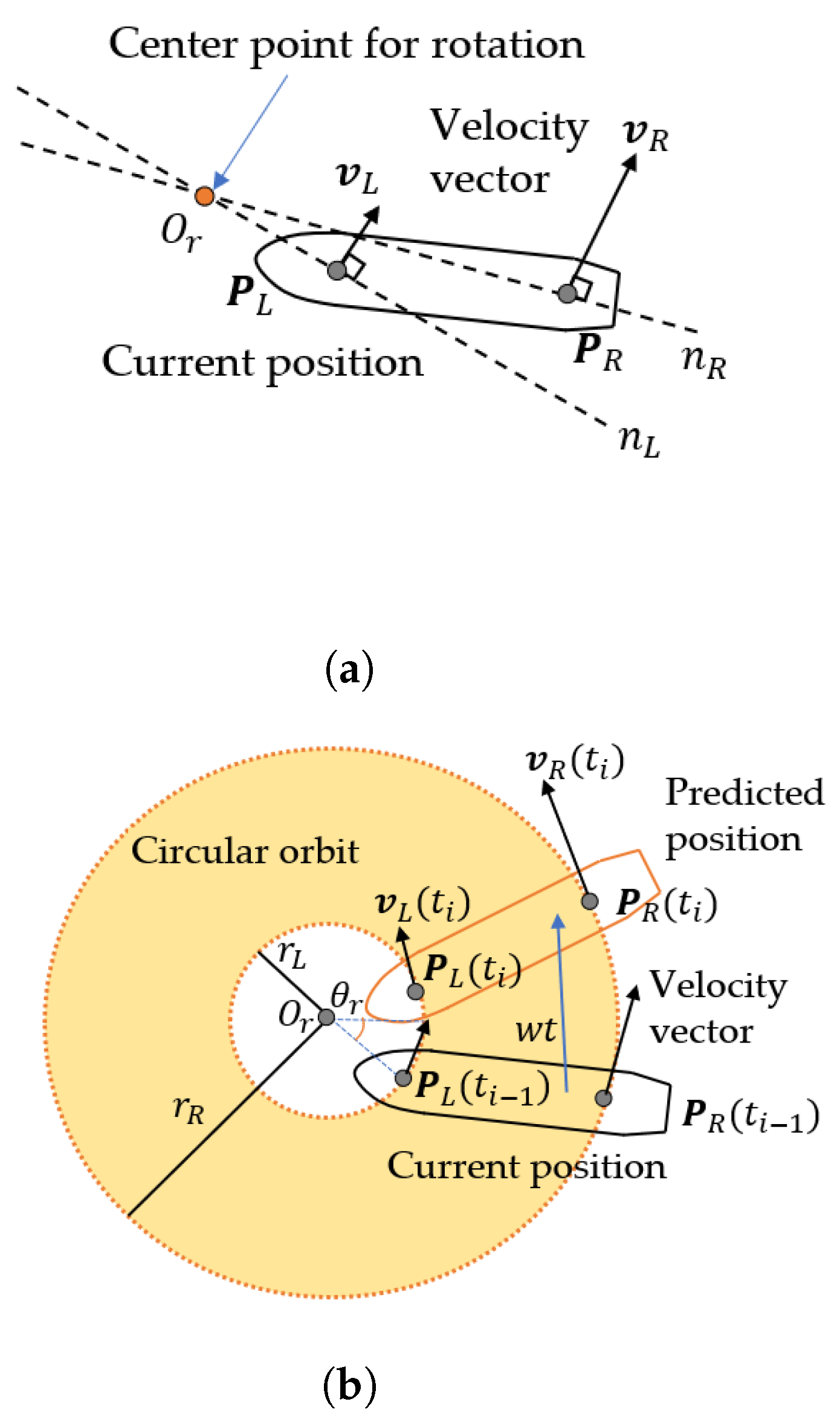
2.2. Motion Estimation for a Berthing Vessel
3. Simulation of the Interface System
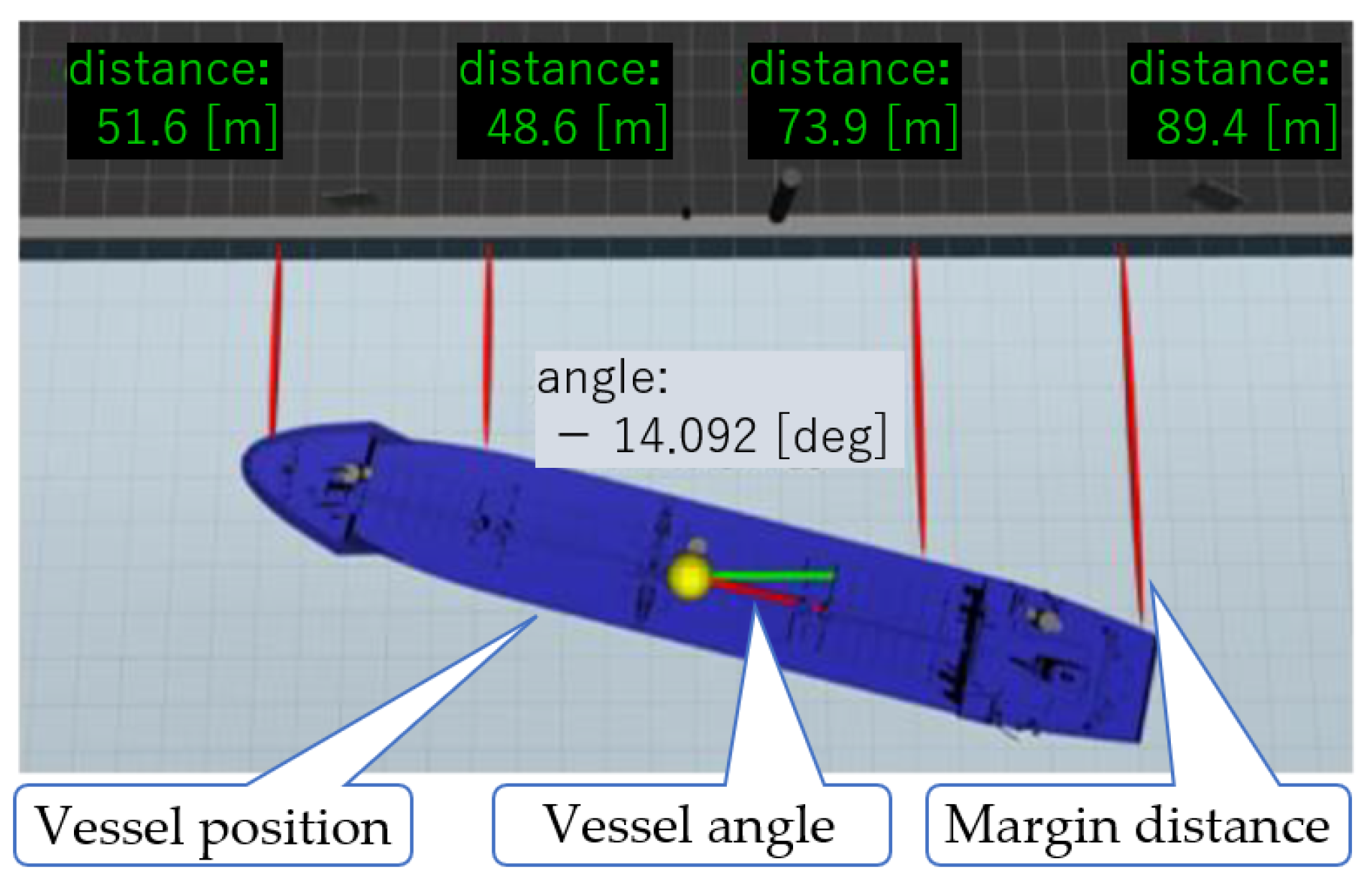
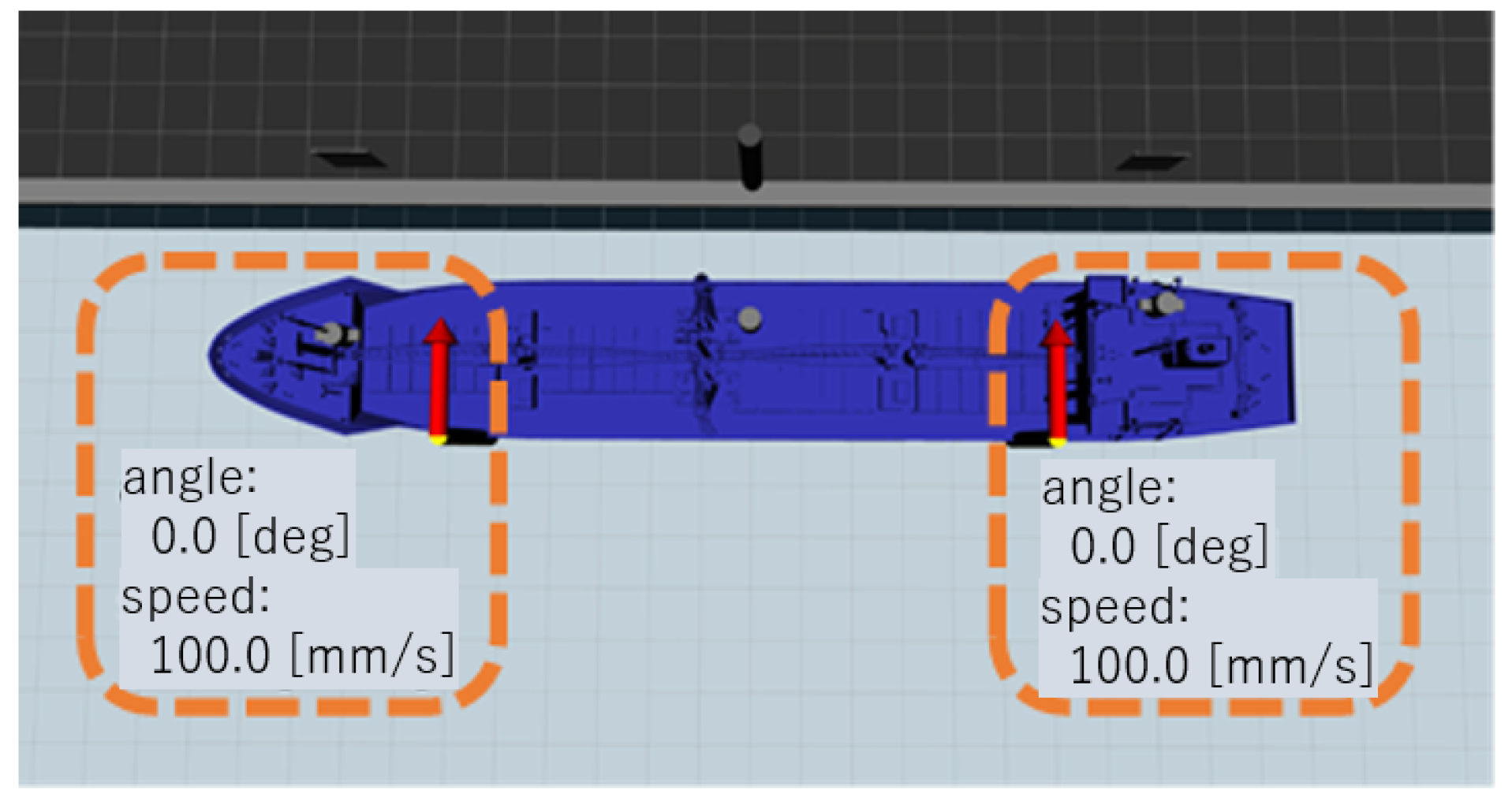
3.1. Visualization for a Vessel Positioning
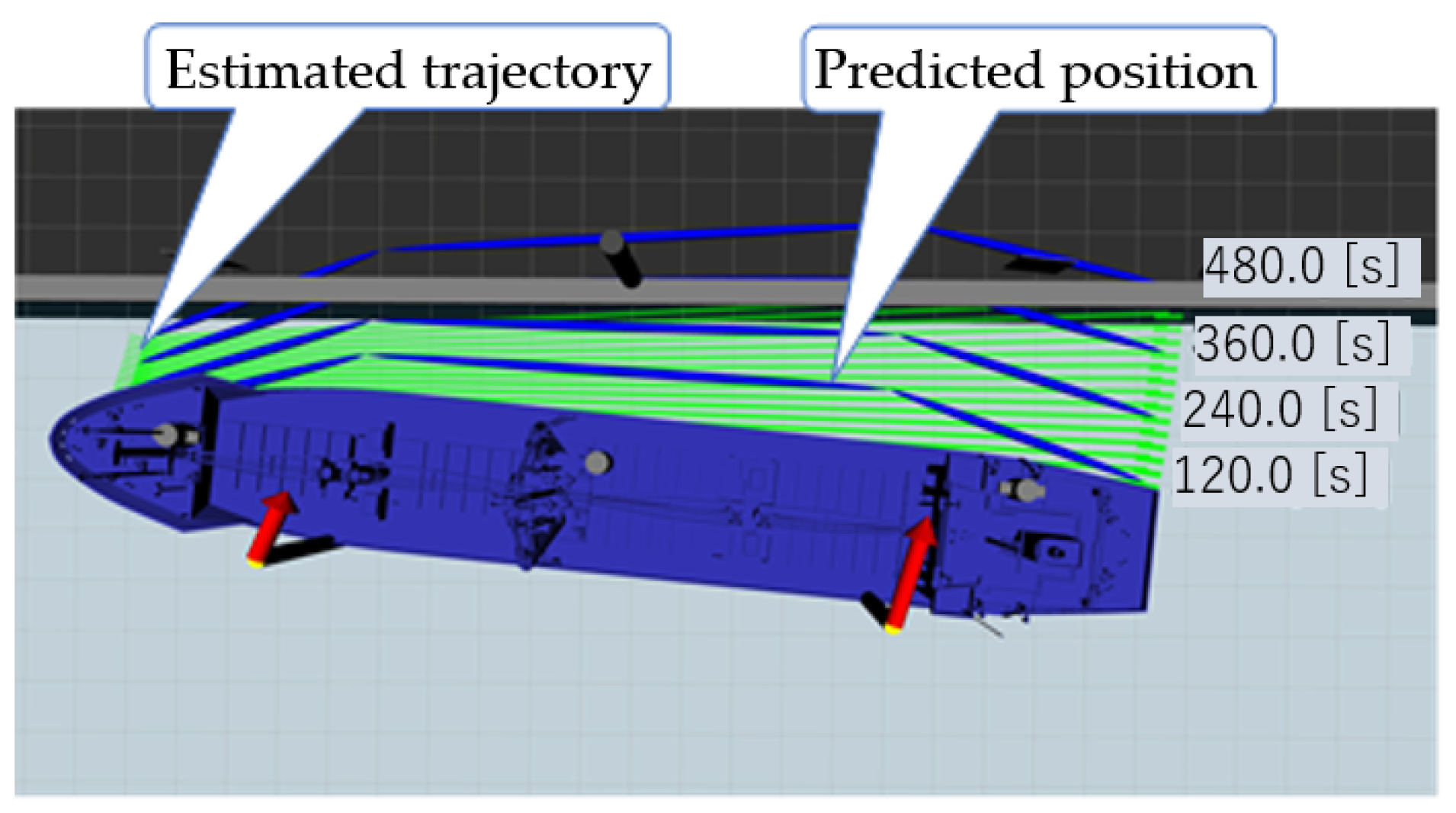
3.2. Visualization for Vessel Motion and Trajectory
3.3. Experiment for the Visualization Interface
4. Extension to a Portable Interface System
4.1. Decentralization of Each System Function
4.2. Extension of the Functionality to a Portable Terminal
4.3. Experiments for Verification
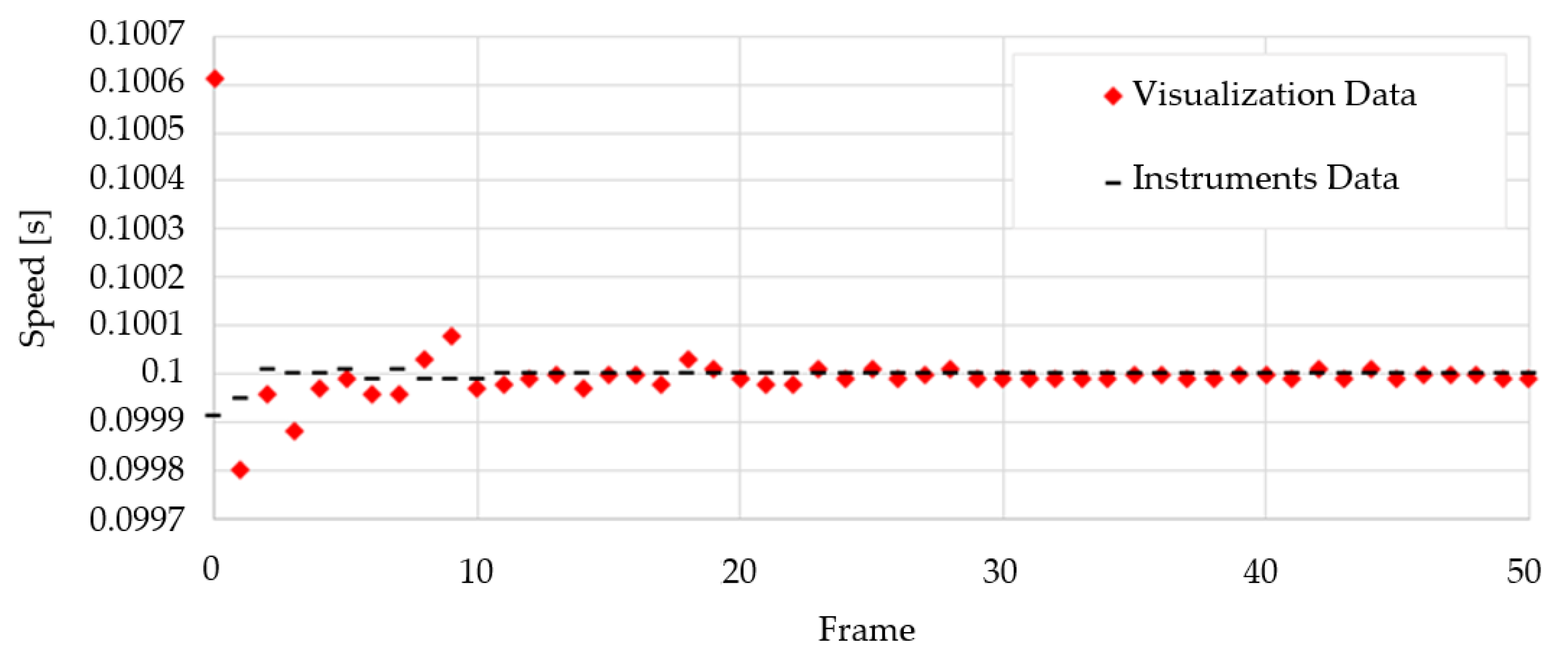
4.3.1. Evaluation of Drawing Stability
4.3.2. Operation Verification of the Web Application
4.3.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Port of Kitakyusyu. Available online: http://www.kitaqport.or.jp/index.html (accessed on 16 October 2022).
- Oda, H.; Okuyama, E.; Kawamori, Y. New Berthing Support System (NBSS) using high accuracy differential GPS—Application to Safety Navigation Management. Mar. Eng. 2009, 44, 64–69. [Google Scholar] [CrossRef] [Green Version]
- Perkovič, M.; Gucma, L.; Bilewski, M.; Muczynski, B.; Dimc, F.; Luin, B.; Vidmar, P.; Lorenčič, V.; Batista, M. Laser-based aid systems for berthing and docking. J. Mar. Sci. Eng. 2020, 8, 346. [Google Scholar] [CrossRef]
- Mizuchi, Y.; Ogura, T.; Kim, Y.B.; Hagiwara, Y.; Choi, Y. Vision-based markerless measurement system for relative vessel positioning. IET Sci. Meas. Technol. 2016, 10, 653–658. [Google Scholar] [CrossRef]
- Yuen, H.; Choi, Y.; Kim, Y.B. Implementation of Tracking-Learning-Detection for Improving a Stereo-Camera-based Marker-less Distance Measurement System for Vessel Berthing. In Proceedings of the CSPA2020/IEEE Malaysia, Langkawi, Malaysia, 28–29 February 2020; pp. 46–51. [Google Scholar]
- Kawai, H.; Kim, Y.B.; Choi, Y. Measurement of a container crane spreader under bad weather conditions by image restoration. IEEE Trans. Instrum. Meas. 2012, 61, 35–42. [Google Scholar] [CrossRef]
- Quigley, M.; Gerkey, B.; Conley, K. ROS: An open-source robot operating system. In Proceedings of the ICRA Workshop on Open-Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Mizuchil, Y.; Ogura, T.; Kim, Y.B.; Hagiwara, Y.; Choi, Y. Camera-based measurement for close-distance relative vessel positioning. J. Mech. Sci. Technol. 2017, 31, 1899–1907. [Google Scholar] [CrossRef]
- Ogura, T.; Mizuchi, Y.; Kim, Y.B.; Choi, Y. Highly accurate stereo-based measuring and tracking system for vessel control. In Proceedings of the 15th International Conference on Control Automation and Systems, Busan, Korea, 13–16 October 2015; pp. 763–768. [Google Scholar]
- Spandonidis, C.; Giannopoulos, F.; Petsa, A.; Eleftheridis, P.; Sedikos, E. A Data-Driven Situational Awareness System for Enhanced Air Cargo Operations Emergency Control. Smart Cities 2021, 4, 1087–1103. [Google Scholar] [CrossRef]
- Okada, K. ROS (Robot Operating System). J. Robot. Soc. Jpn. 2012, 30, 830–835. [Google Scholar] [CrossRef]
- Yoshimura, M.; Kawai, H.; Iyota, T.; Choi, Y. Hardware design of vector code correlation method for high-speed template matching. In Proceedings of the International Conference on Control Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2529–2532. [Google Scholar]
- Yuasa, D.; Choi, Y. Development of an interface visualizing measured distance information for vessel berthing support system. In Proceedings of the SICE Annual Conference, Nara, Japan, 11–14 September 2018. [Google Scholar]
- Tsuyuzaki, T.; Choi, Y.; Kim, Y.B. Evaluation of a visualized interface system for vessel berthing. In Proceedings of the 2019 KSPSE Autumn Conference, Jeju, Korea, 13–15 November 2019; pp. 195–197. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ito, K.; Tsuyuzaki, T.; Yuasa, D.; Choi, Y.; Kim, Y.-B. Development of a Portable Interface System Sharing the Positioning and Heading Information to Support a Berthing Vessel. J. Mar. Sci. Eng. 2022, 10, 1637. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10111637
Ito K, Tsuyuzaki T, Yuasa D, Choi Y, Kim Y-B. Development of a Portable Interface System Sharing the Positioning and Heading Information to Support a Berthing Vessel. Journal of Marine Science and Engineering. 2022; 10(11):1637. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10111637
Chicago/Turabian StyleIto, Kazuki, Toyoharu Tsuyuzaki, Daiki Yuasa, Yongwoon Choi, and Young-Bok Kim. 2022. "Development of a Portable Interface System Sharing the Positioning and Heading Information to Support a Berthing Vessel" Journal of Marine Science and Engineering 10, no. 11: 1637. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10111637