
Real-Time Weight Optimization of a Nonlinear Model Predictive Controller Using a Genetic Algorithm for Ship Trajectory Tracking



Abstract
:1. Introduction
- (1)
- NMPC is applied to the ship trajectory tracking control, and the genetic algorithm is used to optimize the weight coefficients of the objective function in NMPC in real time;
- (2)
- The crossover operator, mutation operator, crossover rate, and mutation rate in the genetic algorithm are improved to enhance the performance of the genetic algorithm.
2. Nonlinear Model Predictive Control for Trajectory Tracking
2.1. Ship Mathematical Model
2.2. Discrete-Time NMPC Scheme
3. Genetic Algorithm-Based Weight Tuning of NMPC
3.1. General Principle of GA
3.2. Application and Improvement of GA for Real-Time Weight Tuning
3.2.1. Fitness Function
3.2.2. Improvement of Crossover Operator
3.2.3. Adoption of Mutation Operator
3.2.4. Improvement of Crossover and Mutation Rate
3.3. Optimization Procedure of GA-NMPC
- (1)
- (2)
- Define parent population size as , and are the genes carried by each individual’s chromosome.
- (3)
- Encode chromosomes and calculate the fitness values through Equation (13), and sort the chromosomes from high to low according to fitness values.
- (4)
- Determine the number of chromosomes that need to be crossed according to crossover rate . Select a corresponding number of chromosomes with high fitness values through the tournament strategy, and then cross these chromosomes according to Equations (14) and (15) to obtain new chromosomes. Finally, the newly generated chromosomes are used to replace the chromosomes with the lowest fitness values in the parent population.
- (5)
- After crossover, the chromosome will be mutated according to the mutation rate . The individuals with low fitness values in the parent population are mutated based on Equation (16). Thus far, a new parent population has emerged.
- (6)
- If the number of iterations does not reach the maximum number of iterations , continue the cycle. Otherwise, the individual with largest fitness value is introduced into objective function (9) as weight matrices Q and R. The optimal solution sequence is obtained by solving the objective function (9), and then the first element is input into the closed-loop system to complete the ship trajectory tracking.
4. Simulation Evaluation and Discussion
4.1. Main Parameters Setting
- (1)
- The proposed GA-NMPC algorithm with real-time online weight optimization with initial , ;
- (2)
- NMPC with constant weight matrices ;
- (3)
- NMPC with constant weight matrices .
- (1)
- Circle trajectory, with the expression described as:
- (2)
- Sine curve trajectory, with the expression described as:
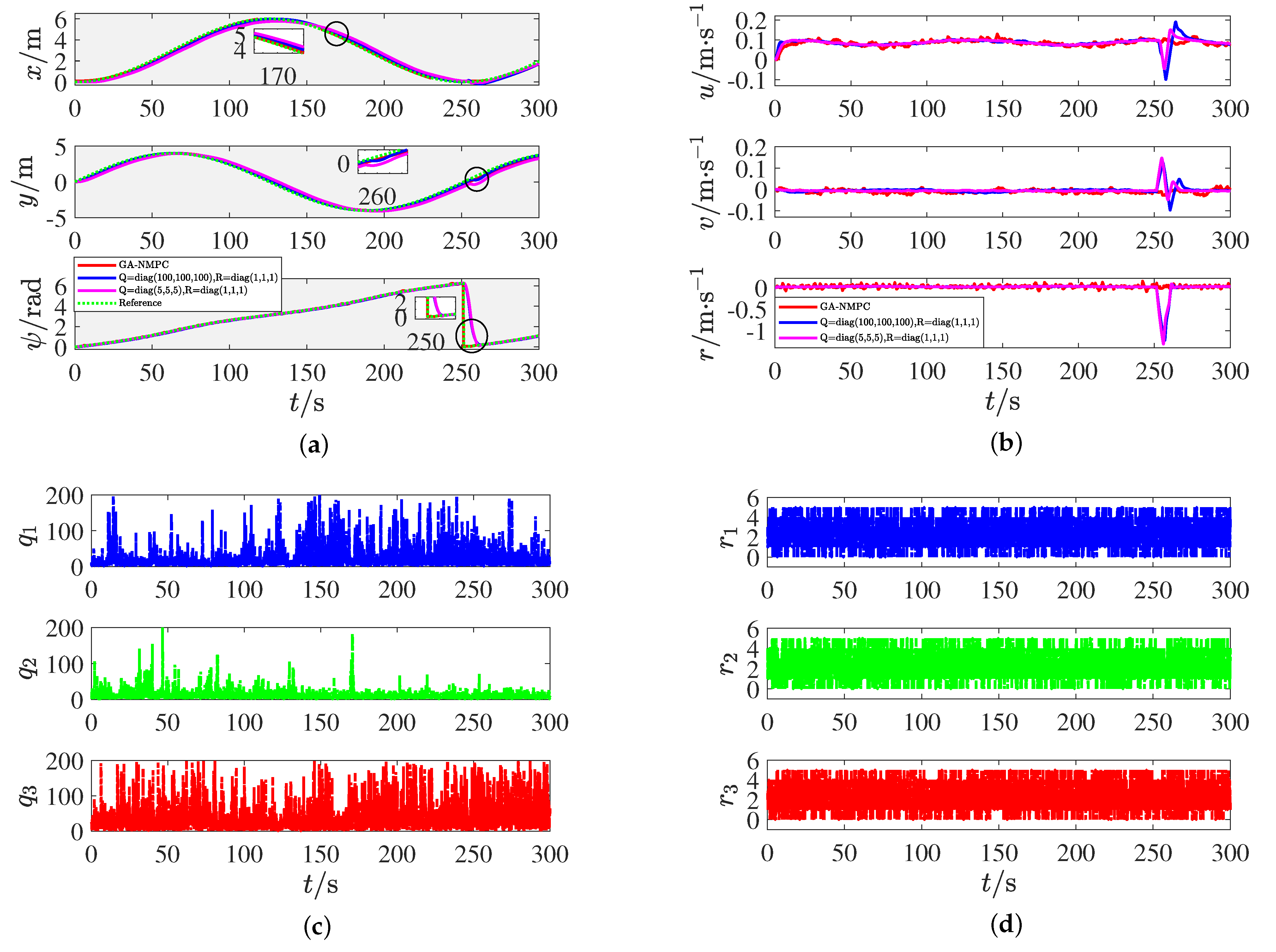
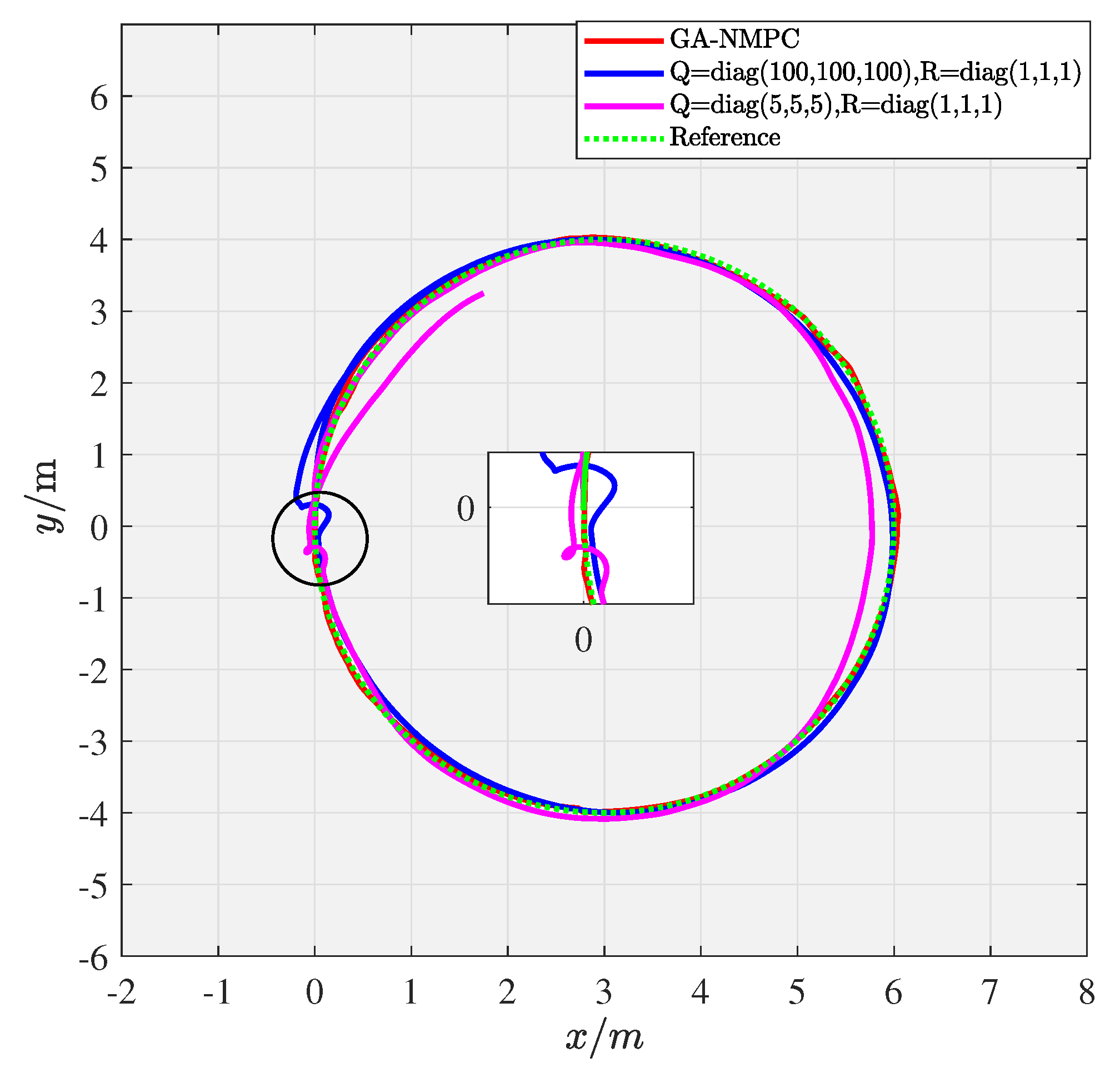
4.2. Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moreira, L.; Fossen, T.I.; Soares, C.G. Path following control system for a tanker ship model. Ocean Eng. 2007, 34, 2074–2085. [Google Scholar] [CrossRef]
- Consolini, L.; Tosques, M. A minimum phase output in the exact tracking problem for the non-minimum phase underactuated surface ship. IEEE Trans. Autom. Control 2012, 57, 3174–3180. [Google Scholar] [CrossRef]
- Zhu, G.; Du, J. Global robust adaptive trajectory tracking control for surface ships under input saturation. IEEE J. Ocean. Eng. 2018, 45, 442–450. [Google Scholar] [CrossRef]
- Katayama, H.; Aoki, H. Straight-line trajectory tracking control for sampled-data underactuated ships. IEEE Trans. Control Syst. Technol. 2013, 22, 1638–1645. [Google Scholar]
- Qu, Y.; Xiao, B.; Fu, Z.; Yuan, D. Trajectory exponential tracking control of unmanned surface ships with external disturbance and system uncertainties. ISA Trans. 2018, 78, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Bu, R.; Gao, X. Ship trajectory tracking control system design based on sliding mode control algorithm. Pol. Marit. Res. 2018, 25, 26–34. [Google Scholar] [CrossRef]
- Wang, W.; Rivera, D.E.; Kempf, K.G. Model predictive control strategies for supply chain management in semiconductor manufacturing. Int. J. Prod. Econ. 2007, 107, 56–77. [Google Scholar] [CrossRef]
- Brdys, M.A.; Grochowski, M.; Gminski, T.; Konarczak, K.; Drewa, M. Hierarchical predictive control of integrated wastewater treatment systems. Control Eng. Pract. 2008, 16, 751–767. [Google Scholar] [CrossRef]
- Salsbury, T.; Mhaskar, P.; Qin, S.J. Predictive control methods to improve energy efficiency and reduce demand in buildings. Comput. Chem. Eng. 2013, 51, 77–85. [Google Scholar] [CrossRef]
- Keviczky, T.; Balas, G.J. Receding horizon control of an F-16 aircraft: A comparative study. Control Eng. Pract. 2006, 14, 1023–1033. [Google Scholar] [CrossRef]
- Oh, S.R.; Sun, J. Path following of underactuated marine surface vessels using line-of-sight based model predictive control. Ocean Eng. 2010, 37, 289–295. [Google Scholar] [CrossRef]
- Li, Z.; Sun, J. Disturbance compensating model predictive control with application to ship heading control. IEEE Trans. Control Syst. Technol. 2011, 20, 257–265. [Google Scholar] [CrossRef]
- Kapetanović, N.; Bibuli, M.; Mišković, N.; Caccia, M. Real-time model predictive line following control for underactuated marine vehicles. IFAC-PapersOnLine 2017, 50, 12374–12379. [Google Scholar] [CrossRef]
- Henson, M.A. Nonlinear model predictive control: Current status and future directions. Comput. Chem. Eng. 1998, 23, 187–202. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear model predictive control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Yang, H.; Deng, F.; He, Y.; Jiao, D.; Han, Z. Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based on nonlinear disturbance observer. Ocean Eng. 2020, 215, 107885. [Google Scholar] [CrossRef]
- Zhao, R.C.; Wong, P.K.; Xie, Z.C.; Zhao, J. Real-time weighted multi-objective model predictive controller for adaptive cruise control systems. Int. J. Automot. Technol. 2017, 18, 279–292. [Google Scholar] [CrossRef]
- Rankovic, V.; Radulović, J.; Grujovic, N.; Divac, D. Neural network model predictive control of nonlinear systems using genetic algorithms. Int. J. Comput. Commun. Control 2012, 7, 540–549. [Google Scholar] [CrossRef]
- Ramasamy, V.; Sidharthan, R.K.; Kannan, R.; Muralidharan, G. Optimal Tuning of Model Predictive Controller Weights Using Genetic Algorithm with Interactive Decision Tree for Industrial Cement Kiln Process. Processes 2019, 7, 938. [Google Scholar] [CrossRef]
- Essa, M.E.S.M.; Aboelela, M.A.S.; Hassan, M.A.; Abdrabbo, S.M. Design of model predictive force control for hydraulic servo system based on cuckoo search and genetic algorithms. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 701–714. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X. Model predictive control method of a parallel electromagnetic isolation system based on the improved genetic algorithm. J. Vib. Control 2020, 26, 2001–2012. [Google Scholar] [CrossRef]
- Tang, P.H.; Tseng, M.H. Adaptive directed mutation for real-coded genetic algorithms. Appl. Soft Comput. J. 2013, 13, 600–614. [Google Scholar] [CrossRef]
- Chuang, Y.C.; Chen, C.T.; Hwang, C. A real-coded genetic algorithm with a direction-based crossover operator. Inf. Sci. 2015, 305, 320–348. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1999; pp. 5–56. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Chichester, UK, 2011; pp. 52–59. [Google Scholar]
- Zhu, H.; Zhao, G.; Sun, L.; Lee, K.Y. Nonlinear predictive control for a boiler–turbine unit based on a local model network and immune genetic algorithm. Sustainability 2019, 11, 5102. [Google Scholar] [CrossRef]
- Veerasamy, G.; Kannan, R.; Siddharthan, R.K.; Muralidharan, G.; Sivanandam, V.; Amirtharajan, R. Integration of genetic algorithm tuned adaptive fading memory Kalman filter with model predictive controller for active fault-tolerant control of cement kiln under sensor faults with inaccurate noise covariance. Math. Comput. Simul. 2022, 191, 256–277. [Google Scholar] [CrossRef]
- Mohammadi, A.; Asadi, H.; Mohamed, S.; Nelson, K.; Nahavandi, S. Multiobjective and interactive genetic algorithms for weight tuning of a model predictive control-based motion cueing algorithm. IEEE Trans. Cybern. 2018, 49, 3471–3481. [Google Scholar] [CrossRef] [PubMed]
- Maran, F. Model-Based Control Techniques for Automotive Applications. Ph.D. Thesis, University of Padova, Padova, Italy, 2013. [Google Scholar]
- Liu, J.; Yang, L.; Zhang, X.; Yan, R.; Chen, X. Intelligent time-domain parameters matching for shock response spectrum and its experimental validation in active vibration control systems. Shock Vib. 2019, 2019, 2920845. [Google Scholar] [CrossRef]
- Tsoulos, I.G.; Tzallas, A.; Tsalikakis, D. PDoublePop: An implementation of parallel genetic algorithm for function optimization. Comput. Phys. Commun. 2016, 209, 183–189. [Google Scholar] [CrossRef]
- Fannemel, Å.V. Dynamic Positioning by Nonlinear Model Predictive Control. Master’s Thesis, Institutt for Teknisk Kybernetikk, Trondheim, Norway, 2008. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| m | 23.8 | kg | –0.1 | kg· m/s | |
| 1.76 | kg· m | –10.0 | kg | ||
| 0.046 | m | –0.0 | kg· m | ||
| –2 | kg/s | –1.0 | kg· m/s | ||
| –2.0 | kg | –0.5 | kg· m/s | ||
| –0.7 | kg/s | –1.0 | kg· m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D.; Deng, F.; Wang, H.; Hou, X.; Yang, H.; Shan, T. Real-Time Weight Optimization of a Nonlinear Model Predictive Controller Using a Genetic Algorithm for Ship Trajectory Tracking. J. Mar. Sci. Eng. 2022, 10, 1110. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10081110
Yu D, Deng F, Wang H, Hou X, Yang H, Shan T. Real-Time Weight Optimization of a Nonlinear Model Predictive Controller Using a Genetic Algorithm for Ship Trajectory Tracking. Journal of Marine Science and Engineering. 2022; 10(8):1110. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10081110
Chicago/Turabian StyleYu, Dunjing, Fang Deng, Hongyan Wang, Xiuhui Hou, Hualin Yang, and Tikun Shan. 2022. "Real-Time Weight Optimization of a Nonlinear Model Predictive Controller Using a Genetic Algorithm for Ship Trajectory Tracking" Journal of Marine Science and Engineering 10, no. 8: 1110. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse10081110