1. Introduction
As one of the special autonomous underwater vehicles (AUV), the bionic robotic fish has a broad application in the development of marine resources due to its good performance of propulsion efficiency, mobility, and concealment [
1,
2,
3]. In the complex underwater environment, path planning is the key for the bionic robotic fish to arrive at the designated location [
4,
5]. However, there are many obstacles and uncertain ocean currents in the underwater environment, which increase the difficulty to find an optimal path for improving the path planning performance of the bionic robotic fish.
A lot of research has been conducted based on deterministic methods for solving AUV path planning, including particle swarm optimization (PSO) algorithm, ant colony optimization (ACO) algorithm, A
* algorithm, genetic algorithm, and so on. For shortening path length, reducing travel time, smoothing trajectory and keeping navigation safety, the PSO algorithm is used to obtain the optimal path based on the obstacles detection by a multi-beam forward looking sonars [
6]. A multi-objective genetic algorithm is presented for the evaluation of an optimal path and the work gives the designer the freedom to choose one desirable path from a set of Pareto-optimal solutions [
7]. An improved quantum particle swarm optimization (IQPSO) algorithm is proposed to satisfy the three factors of path safety, path length, and angle change of the path point [
8]. Combining PSO and Legendre pseudo spectral method (LPM), it presents an efficient path-planner based on the hybrid PSO-LPM algorithm to obtain an optimal path with minimum travelling time [
9]. In order to find an energy-efficient path, a distance evolution nonlinear PSO algorithm is presented in the three-dimensional underwater acoustic sensor networks [
10]; an efficient gain-based dynamic green ACO metaheuristic is proposed to reduce the total energy consumption during path planning [
11]; an AUV traversal path is proposed for communication with the underwater wireless sensor networks [
12]. To solve the target traveling problem in densely obstructive environments, the ACO-A* algorithm is proposed to obtain an optimal path, ACO is used to determine a traveling order of targets, A* performs pairwise path planning based on a search graph [
13]. In order to find the global optimal solution with the shortest path in light of the elite opposition-based learning strategy and the simplex method, an enhanced water wave optimization is used to solve the optimization problem [
14]. However, there inevitably exists uncertain ocean currents and all the above deterministic methods [
6,
7,
8,
9,
10,
11,
12,
13,
14] are difficult to be used in the environment with ocean currents for path planning directly and effectively.
The uncertain ocean currents exist in the complex underwater environment, which increases the difficulty of the path planning for bionic robotic fish. To realize the AUV path planning with time-varying ocean currents, the velocity synthesis algorithm is used to adjust the moving direction of AUV to counteract the current influence [
15,
16]. Although the velocity synthesis algorithm can make the designer obtain a non-collision path in theory, it is difficult to realize the real time accurate measurement of the value and direction of time-varying ocean currents in complex environment. Based on the forecast of the ocean currents, a genetic algorithm is proposed for AUV path planning to find a safe path for minimizing the energy consumption in an ocean environment characterized by strong currents [
17]. A quantum particle swarm optimization (QPSO) algorithm is proposed to solve the AUV path planning problem in ocean currents environment [
18]. It assumes that the currents remain static in direction and strength over the course of the mission, however, the strong uncertain ocean current or dynamic flow not only reduces the path planning performance index, but even leads the AUV to collide with the obstacles. Recently, fundamental level-set Partial Differential Equations (PDEs) have been developed for AUV time-optimal [
19,
20,
21] and energy-optimal [
22,
23] path planning in strong and dynamic ocean currents. It can directly utilize a forecast of the dynamic environment to plan collision-free optimal paths that intelligently utilize favorable flows and avoid adverse currents. In these works, the PDEs are used for path planning based on the forecast of the environmental flows, the accuracy of the forecast of the ocean currents determines the effectiveness of the path planning. In summary, in order to obtain an optimal path, the above studies are focused on the forecast of ocean currents [
17,
19,
20,
21,
22,
23], simplifying the ocean currents environments [
18] or detecting the currents [
15,
16] in real time. However, environments simplifying or forecast based on modelling may not match with the real complex underwater environment with strong currents; the ocean current detecting takes up a lot of computing resources and it is difficult to obtain accurate real-time values. Therefore, it needs a new method for path planning for bionic robotic fish in the complex environment with ocean currents.
Ocean currents are one of the prominent disturbances for bionic robotic fish in the underwater environment, which can help and hinder the mission for bionic robotic fish [
24]. In other words, the bionic robotic fish may save the energy and shorten the path length by allowing it to ride the current, or use more energy and increase the path length through the opposing motion of the ocean forcing. Therefore, the uncertain ocean currents cannot to be ignored for bionic robotic fish path planning in practice. In this paper, in order to solve the path planning for bionic robotic fish with ocean currents, based on the established Kinematic model for bionic robotic fish, an optimization problem is proposed with the objective function of the path energy consumption. Considering the uncertainty of ocean currents, based on the upper and lower limits of ocean currents, it forms a “min-max” robust optimization problem for the path planning for bionic robotic fish, which is solved by the proposed co-evolutionary genetic algorithm. The proposed algorithm can obtain a robust path that has the best worst-case performance over a set of possible ocean currents.
The rest of this paper is organized as follows.
Section 2 proposes the problem description of the path planning for bionic robotic fish;
Section 3 establishes the mathematical models for the path planning;
Section 4 presents the robust optimization problem and the corresponding co-evolutionary genetic algorithm; the simulation results are given and analyzed in
Section 5; finally, the paper is concluded in
Section 6.
4. Robust Optimization Design for Path Planning
In this paper, the bionic robotic fish works in a complex underwater environment, it is a challenge problem of non-collision path planning with low energy consumption in the presence of ocean currents [
16]. Robust optimization is the problem to find the best solution in the worst cases, it’s also called “min-max” problem, which is proposed to solve the path planning with the ocean currents. Considering the uncertain of ocean currents, Equation (9) is transformed into a “min-max” optimization problem as follows.
where
and
are the minimum and maximum values of the components of ocean currents based on the historical data, which can be obtained based on Equation (7). Equation (19) is a “min-max” optimization problem for the path planning for bionic robotic fish, whose goal is to find the robust solution that the obtained path with the best performance in all the worst cases of ocean currents.
The robust optimization problem is more challenging to be solved than general ones due to its computational complexity [
28,
29], to make the robust optimization of path planning for bionic robotic fish feasible, a co-evolutionary genetic algorithm is developed and used in this section.
Genetic algorithm is widely used in engineering practice due to its good performance of simple principle, ease of implementation and good scalability, based on the performance of genetic algorithm, co-evolutionary genetic algorithm is formed to solve the robust optimization problem for path planning for bionic robotic fish. There are two populations for co-evolutionary genetic algorithm; individual fitness value depends not only on the individual of its own population, but also on the individual of another population [
30]. In this paper, the individual of population
denotes the solution of the optimization problem, the individual of population
denotes the uncertain cases of ocean currents. Each population is evaluated separately, but they are combined by the evaluation of the fitness functions.
For each solution, the individual fitness function is given as follows:
the objective is to minimize Equation (20), which means that it ignores the larger values and keeps the smaller values of
, the evaluation result retains the minimum value in the worst case, that is, the smaller function value, the greater fitness of the individual.
For each uncertain case, the individual fitness function is given as follows:
the objective is to maximize Equation (21), which means that it ignores the smaller function value
and keeps the larger one, the evaluation result retains the worst case, that is, the larger function value, the greater fitness of the individual. Based on Equations (20) and (21), it can solve the robust path planning problem for bionic robotic fish.
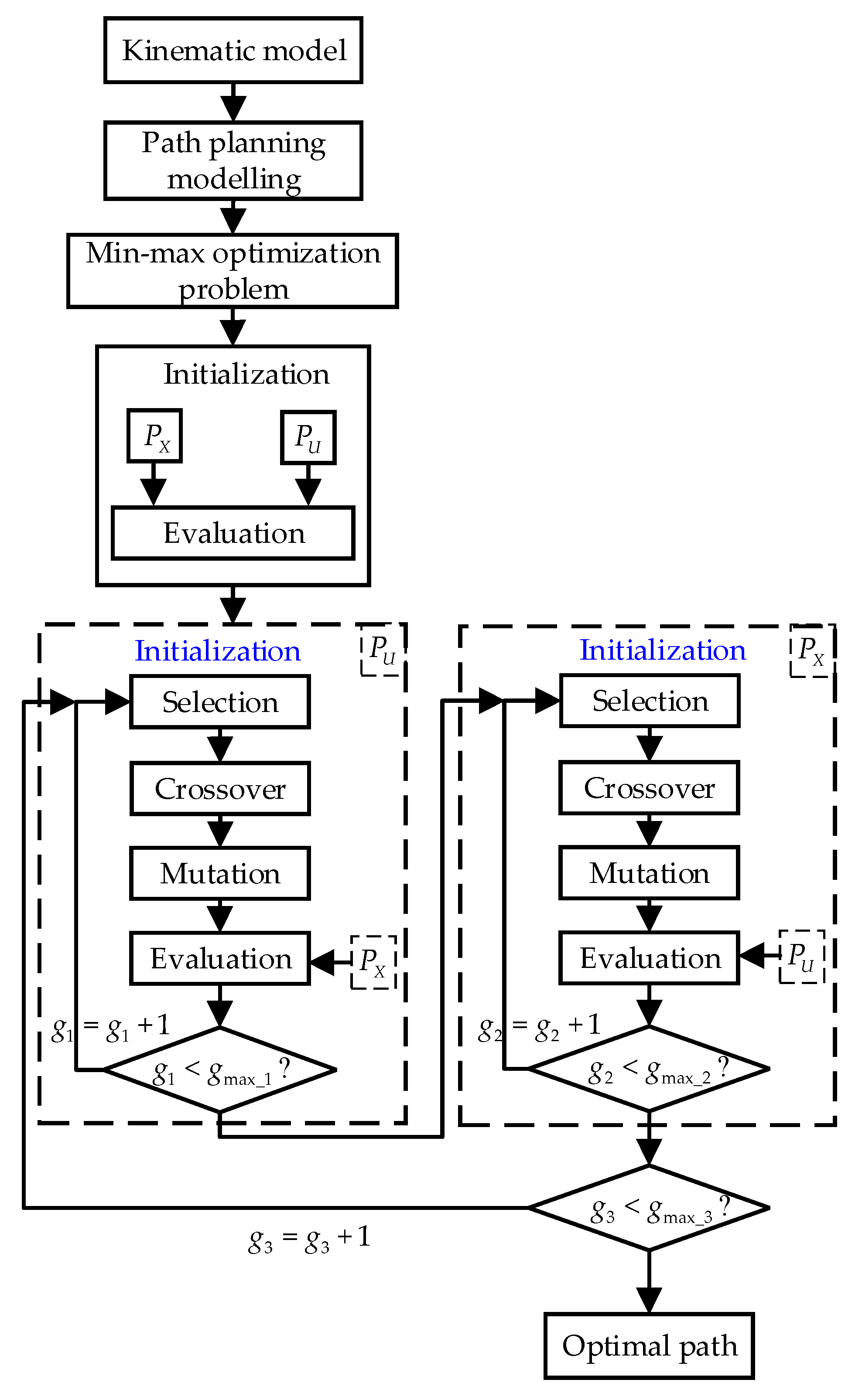
Figure 4 gives the robust optimization design flowchart of the path planning for bionic robotic fish, algorithm 1 gives the corresponding steps in detail.
| Algorithm 1: Robust optimization design for path planning |
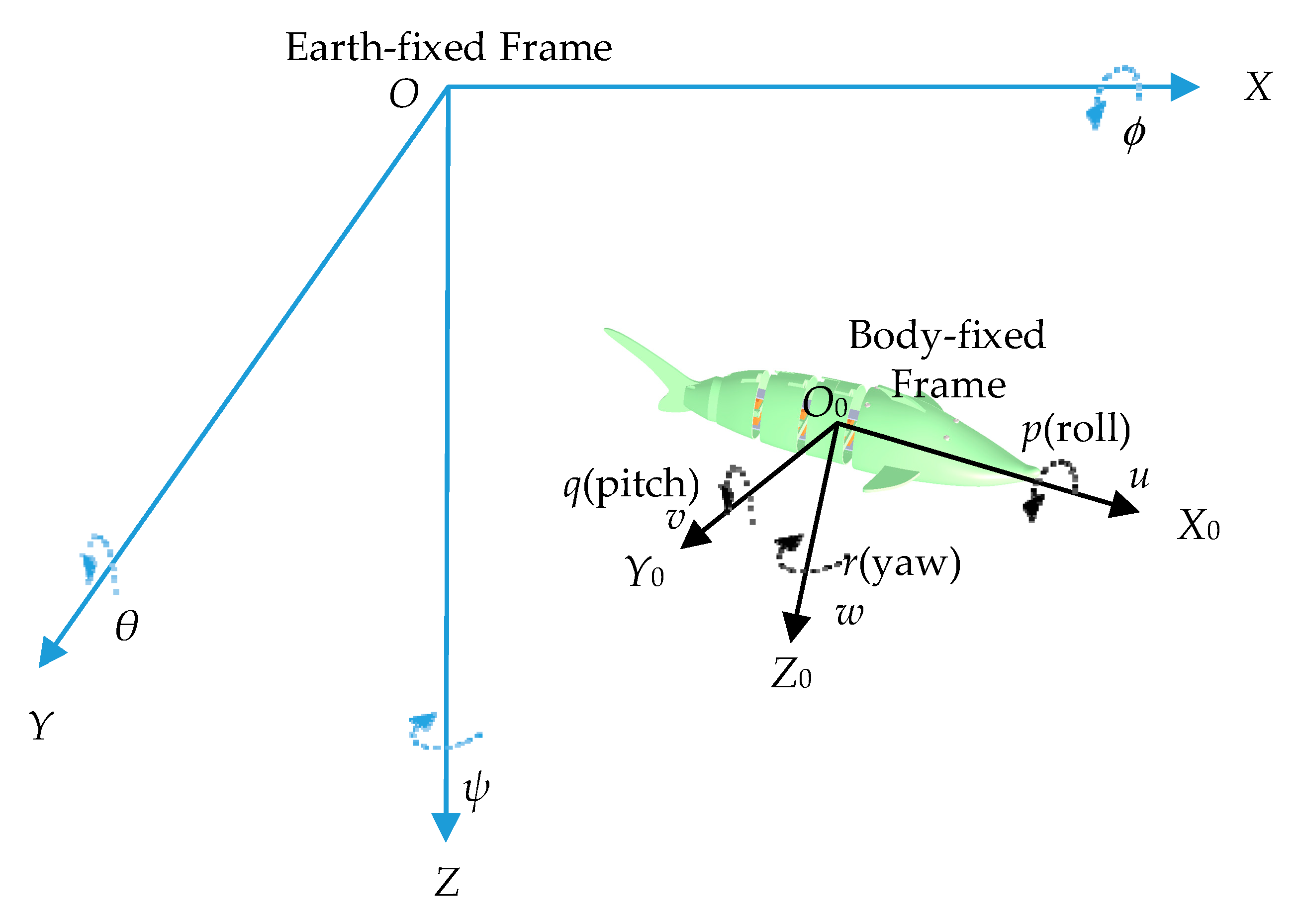
1: Modelling the environment for bionic robotic fish, establishing the two coordinate systems of the earth-fixed frame and the body-fixed frame;
2: Selecting the path energy consumption as the objective function of the path planning for bionic robotic fish;
3: Based on the established Kinematic model for bionic robotic fish, establishing path planning model (9) in the light of three basic elements of objective function, decision variables and constrains;
4: Considering the uncertainty of ocean currents, obtaining the robust optimization problem (19) for path planning of bionic robotic fish;
5: Initializing the parameters such as population size, the maximum number of iterations and so on;
6: Creating two populations and , obtaining multiple collision-free initial paths based on the fitness functions (20) and (21);
7: Evaluating after selection, crossover and mutation operations based on (21);
8: If is smaller than , setting , go to step 7; otherwise go to next step;
9: Evaluating after selection, crossover and mutation operations based on (20);
10: If is smaller than , setting , go to step 9; otherwise go to next step;
11: If is smaller than , setting , go to step 7; otherwise go to next step;
12: Obtaining the optimal path. |
5. Simulation Results and Analysis
In this section, different scenarios are given to illustrate the performance of the proposed robust optimization design for the path planning of bionic robotic fish.
Figure 5 shows the designed bionic robotic fish, the total length, width, and height are 0.617
, 0.239
, and 0.155
respectively. It assumes that the population size is 100 and the maximum number of iterations is 200 for the co-evolutionary genetic algorithm.
To test the performance of the proposed algorithm for path planning of bionic robotic fish in the environment with obstacle and ocean currents, it assumes that the ocean current is in the range of
, whose direction is stochastic.
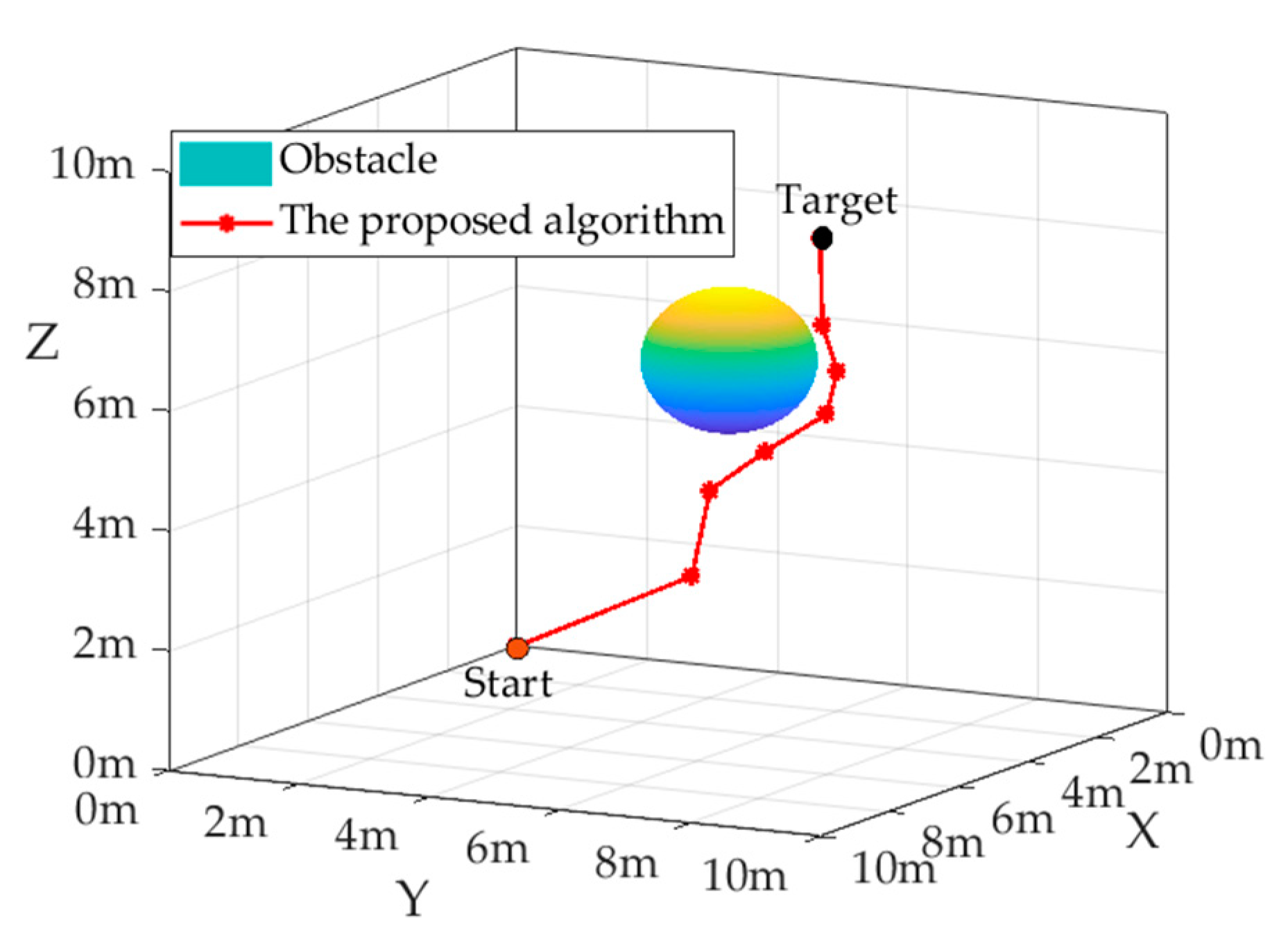
Figure 6 shows that the bionic robotic fish works in the three-dimensional environment with
. The center position is
and radius is 1.2
for the spherical obstacle. The start and target points are
and
respectively, the velocity is 0.2
for the bionic robotic fish.
Figure 6 gives the obtained optimal path by the proposed algorithm, the corresponding path length is 17.89 m. It can be seen that the bionic robotic fish can obtain a non-collision path with the performance of short path length in the environment with the worst ocean currents. If the components of ocean currents
,
and
are 0.05
, 0.06
, 0
in practice, respectively. The energy consumption is 1.0619
for the obtained optimal path by the proposed algorithm. The results show that the proposed algorithm can obtain a safety and smoothness path with low energy consumption in the presence of ocean currents.
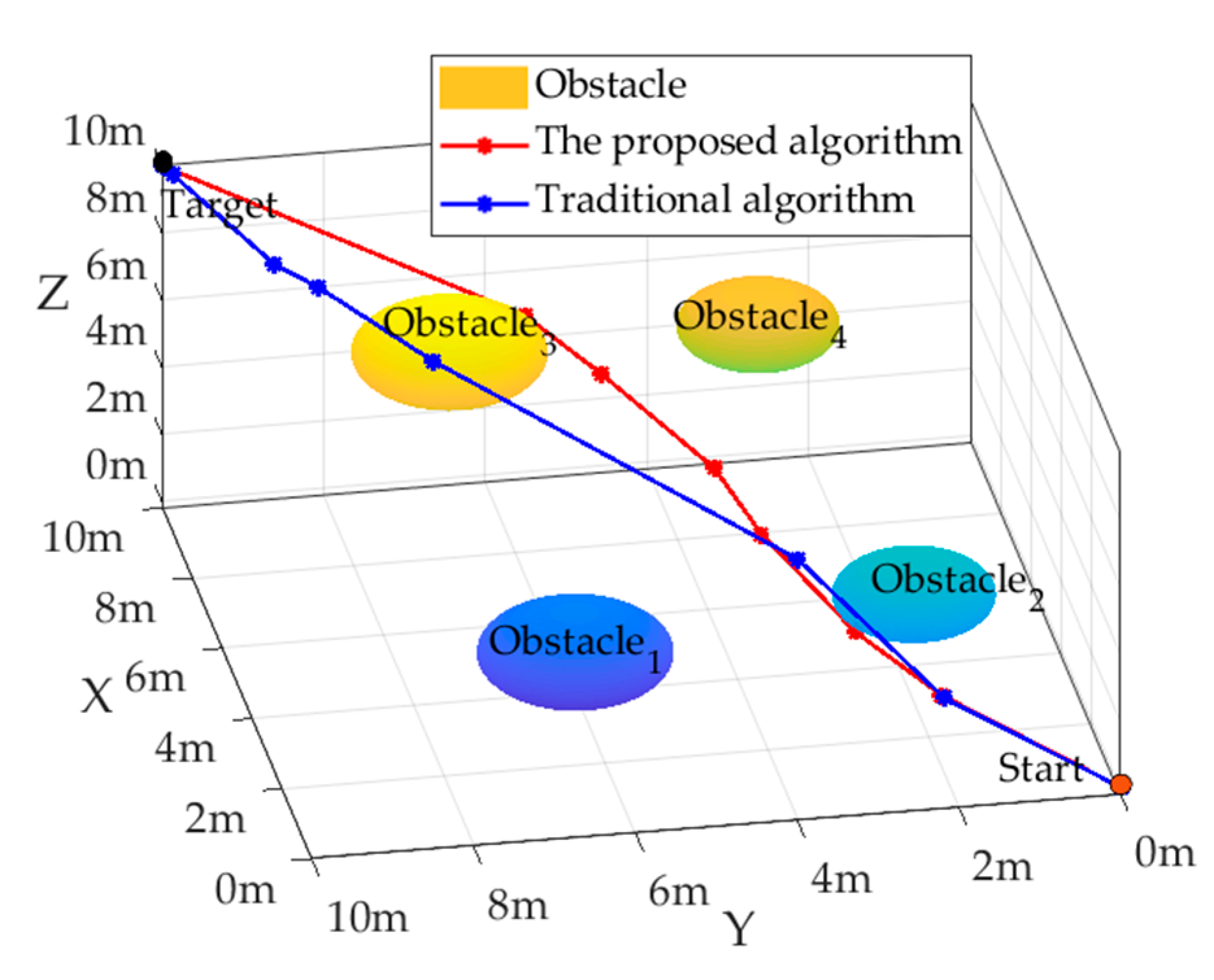
In order to further test the performance of the proposed algorithm, it assumes that there are four obstacles in the environment, the ocean currents are in the range of
, whose direction is stochastic. The bionic robotic fish works in the three-dimensional environment with
, the basic parameters of the obstacles are given in
Table 1. The start and target points are
and
respectively, the velocity of the bionic robotic fish is 0.2
.
Figure 7 gives the obtain optimal path by the proposed algorithm, the corresponding path length is 17.98
. It can be seen that the proposed algorithm can obtain the safe path under the condition of multiple obstacles and ocean currents.
Figure 8 also gives the optimal path by the traditional PSO algorithm without considering the ocean currents (the blue curve), the corresponding path length is 17.73 m. If the components of ocean currents
,
and
are 0.071
, 0.036
, 0
in practice respectively. The energy consumption is 1.079
for following the obtained optimal path by the proposed algorithm, the energy consumption is 1.083
for following the obtained optimal path by the traditional algorithm. It can be seen that the energy consumption is smaller by the proposed algorithm than the traditional method. The main reasons are given as follows: for the proposed algorithm in this paper, it obtains the best solution in the worst case by the proposed algorithm, if the ocean currents are in the range of the given cases, the path planning design can satisfy the requirements for reducing energy consumption. The results show that the proposed algorithm is robust enough to be used in complex environments and can saving energy when lacking real time data about the environment with ocean currents.
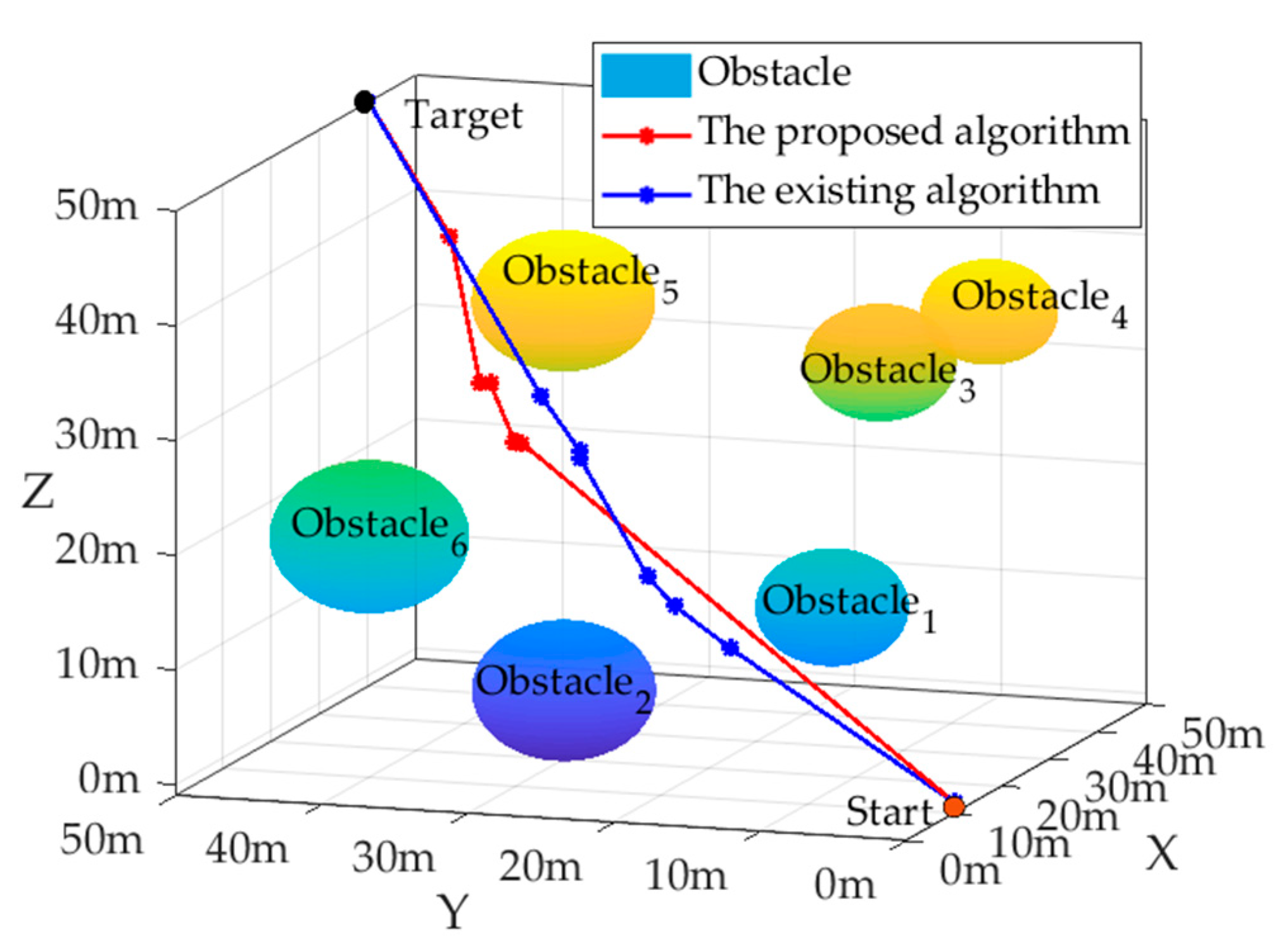
In order to further verify the proposed algorithm in the environment with ocean currents, some comparisons are given for the proposed algorithm and the existing algorithms. It assumes that the bionic robotic fish works in the three-dimensional environment with
, the start and target points are
and
respectively, the velocity of the bionic robotic fish is 0.2
. The ocean currents are in the range of
, whose direction is stochastic.
Table 2 gives the basic parameters of the obstacles of the path planning for bionic robotic fish. In practice, if the components of ocean currents
is 0.03
,
is 0.07
and
is 0
.
Figure 8 shows the comparison results between the proposed and existing IQPSO algorithms [
8]. It can be seen that it can obtain a non-collision path by the proposed algorithm, the corresponding path energy consumption is 4.68
, path length is 80.88
. By using the existing IQPSO algorithm, the corresponding path energy consumption is 4.85
, path length is 79.3
. Compared with the results of the existing IQPSO algorithm, although the length of the planed path is larger by the proposed algorithm, the energy consumption is smaller. This means that the obtained optimal path by the existing algorithm may consume more consumption without considering the effects of ocean currents.
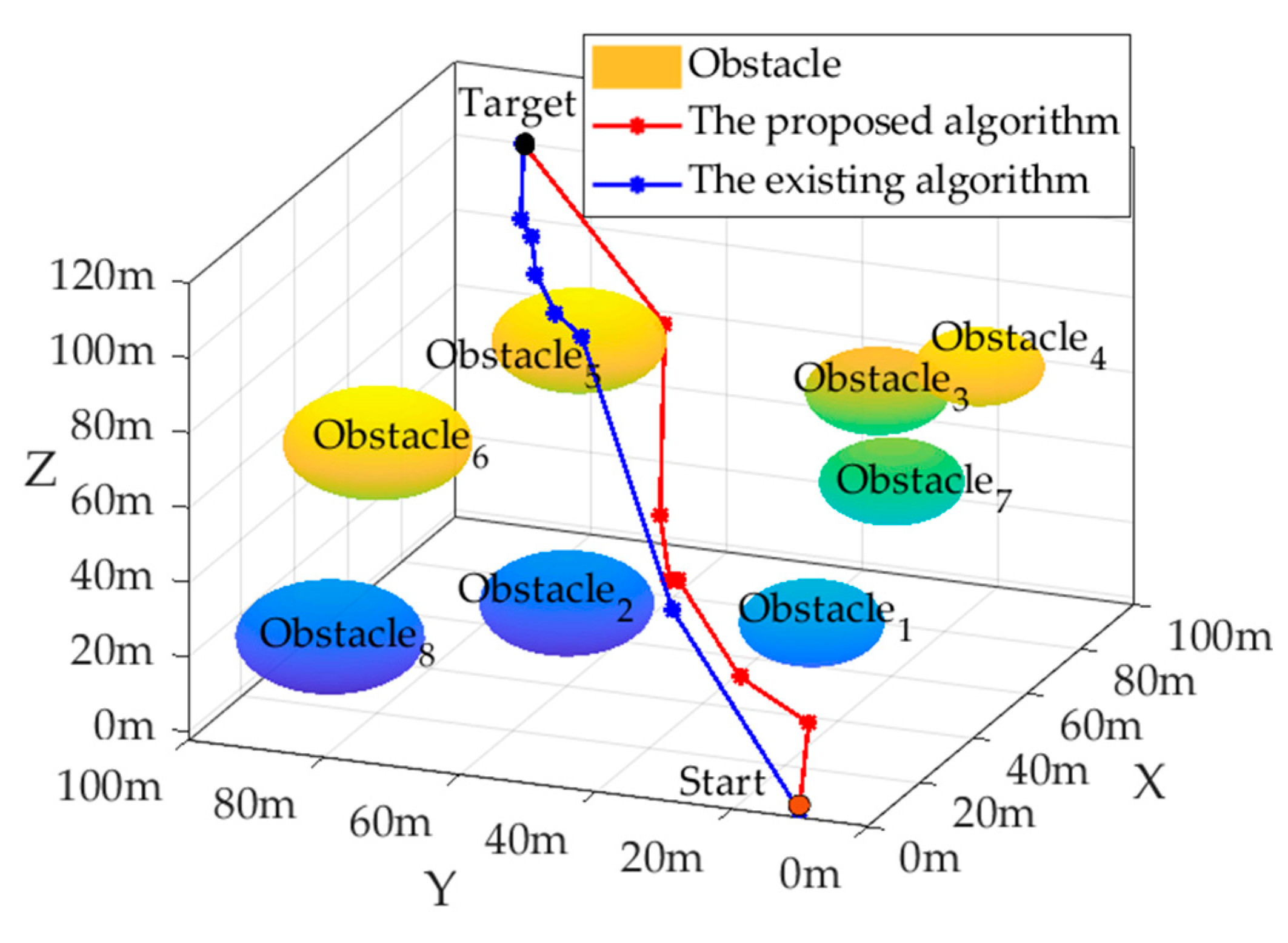
It assumes that the bionic robotic fish works in the three-dimensional environment with
, the ocean currents are in the range of
, whose direction is stochastic. The start and target points are
and
respectively.
Table 3 gives the obstacles parameters for path planning for bionic robotic fish. For the existing QPSO algorithm [
18] to design the path planning with fixed value of ocean currents. It sets the ocean current is 0.1
, the angle is
between the ocean current direction and the
Y-axis; the angle is
between the ocean current direction and
X-axis; the angle is
between the ocean current direction and the
Z-axis. In practice, if the components of ocean currents
is 0.066
,
is 0.045
and
is 0
.
Figure 9 gives the optimal paths by the proposed and the existing QPSO algorithms [
18] for the bionic robotic fish. By using the proposed algorithm, the corresponding energy consumption is 9.822
. The energy consumption is 9.994
by using the existing QPSO algorithm. Compared with the optimal results by the existing algorithm, the energy consumption is smaller by the proposed algorithm. It has good optimization performance of energy consumption by the proposed algorithm for the path planning. The main reason is given as follows, the existing algorithm designs the path planning based on the fixed ocean currents, however, it doesn’t consider the influence with the variable ocean currents in practice, which decrease the optimization performance of the obtained optimal path.
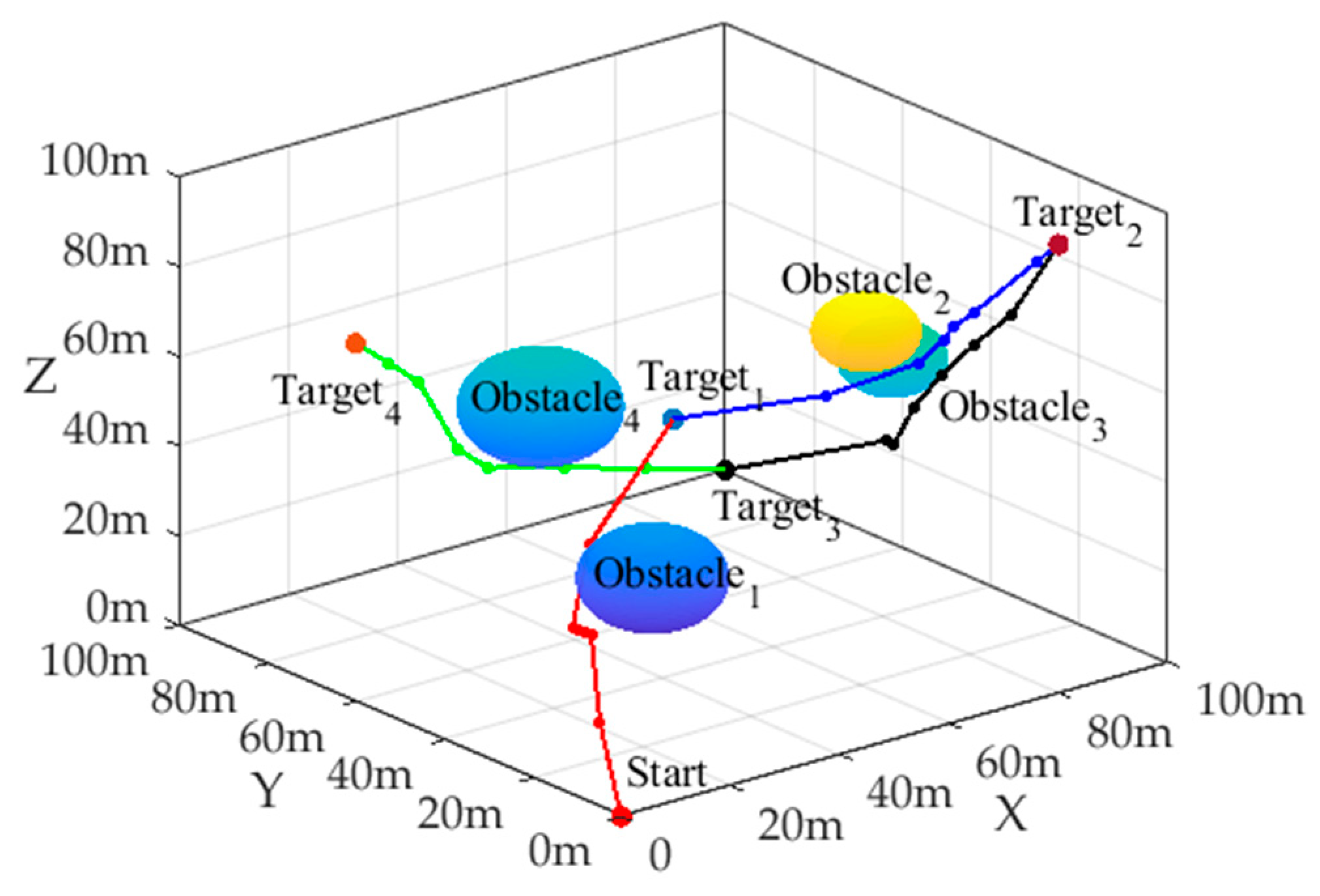
In practice, the bionic robotic fish may need to move from the start point to different targets for detection in sequence. It assumes that the bionic robotic fish works in the three-dimensional environment with
and that the ocean currents are in the range of
, whose direction is stochastic. There are multiple targets and obstacles, the bionic robotic fish must get through these target points according to the order
. The start point is
and the target points are
,
,
,
for target
1 to target
4 respectively. The parameters for the obstacles are given in
Table 4. The velocity for bionic robotic fish is 0.2
.
Figure 10 gives the path planning for the bionic robotic fish to arrive at different targets in sequence, the optimal path energy consumption is 22.75
and path length is 457.09
by the proposed algorithm. One can see that the proposed algorithm can deal with the path planning problem for bionic robotic fish through the targets in sequence in the environment with ocean currents effectively.
It assumes that the bionic robotic fish works in the three-dimensional environment with
and that the ocean currents are in the range of
, whose direction is stochastic. The start and target points are
and
. In practice, if the components of ocean currents
is 0.06
,
is 0.04
and
is 0
.
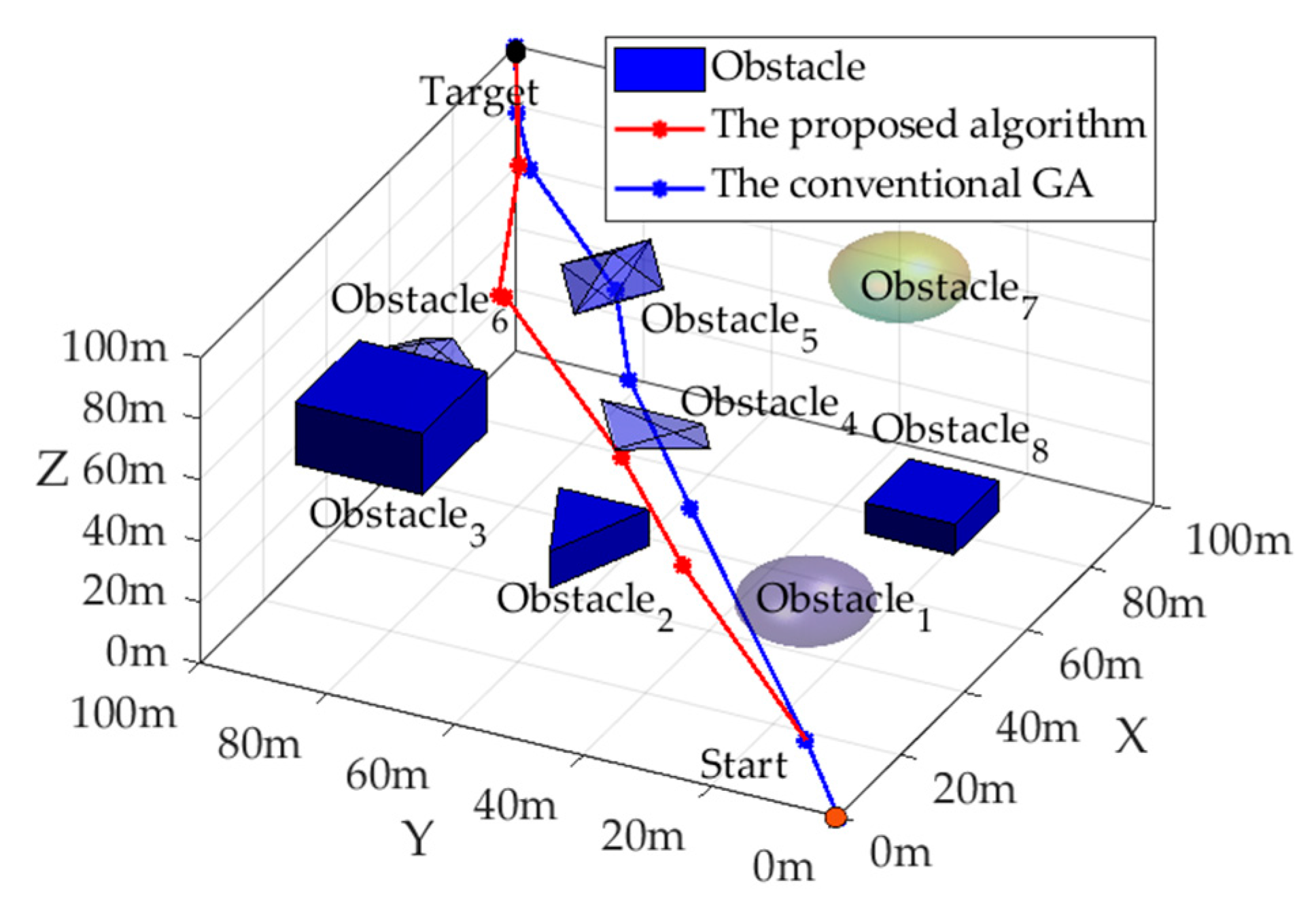
Figure 11 shows the comparison results between the proposed and conventional genetic algorithms, it can be seen that it can obtain a non-collision path by the proposed algorithm, the corresponding path energy consumption is 10.81
, path length is 179.86
. By using the conventional genetic algorithm, the corresponding path energy consumption is 10.99
, path length is 179.02
. Compared with the conventional genetic algorithm, it can be seen that the path length and energy consumption are smaller by the proposed algorithm. The main reason is given as follows, the conventional genetic algorithm designs the path planning without considering the effect of ocean currents, which decreases the optimization performance of the obtained optimal path. Ocean currents affect the energy consumption of the path planning in practice.
Table 5 gives the energy consumption with different ocean currents. It assumes that the design conditions are given as follows: the magnitude of ocean current velocity
, the velocity is
for the bionic robotic fish. The optimal path length is 188.72
by the proposed algorithm. In practice, with the increasing of the values of ocean currents, the energy consumption increases. For example, if the components of ocean currents
is 0.05
,
is 0.05
and
is 0
; the path energy consumption is 20.96
. If the components of ocean currents
is 0.1
,
is 0.1
and
is 0
; the path energy consumption is 28.53
, which is larger.
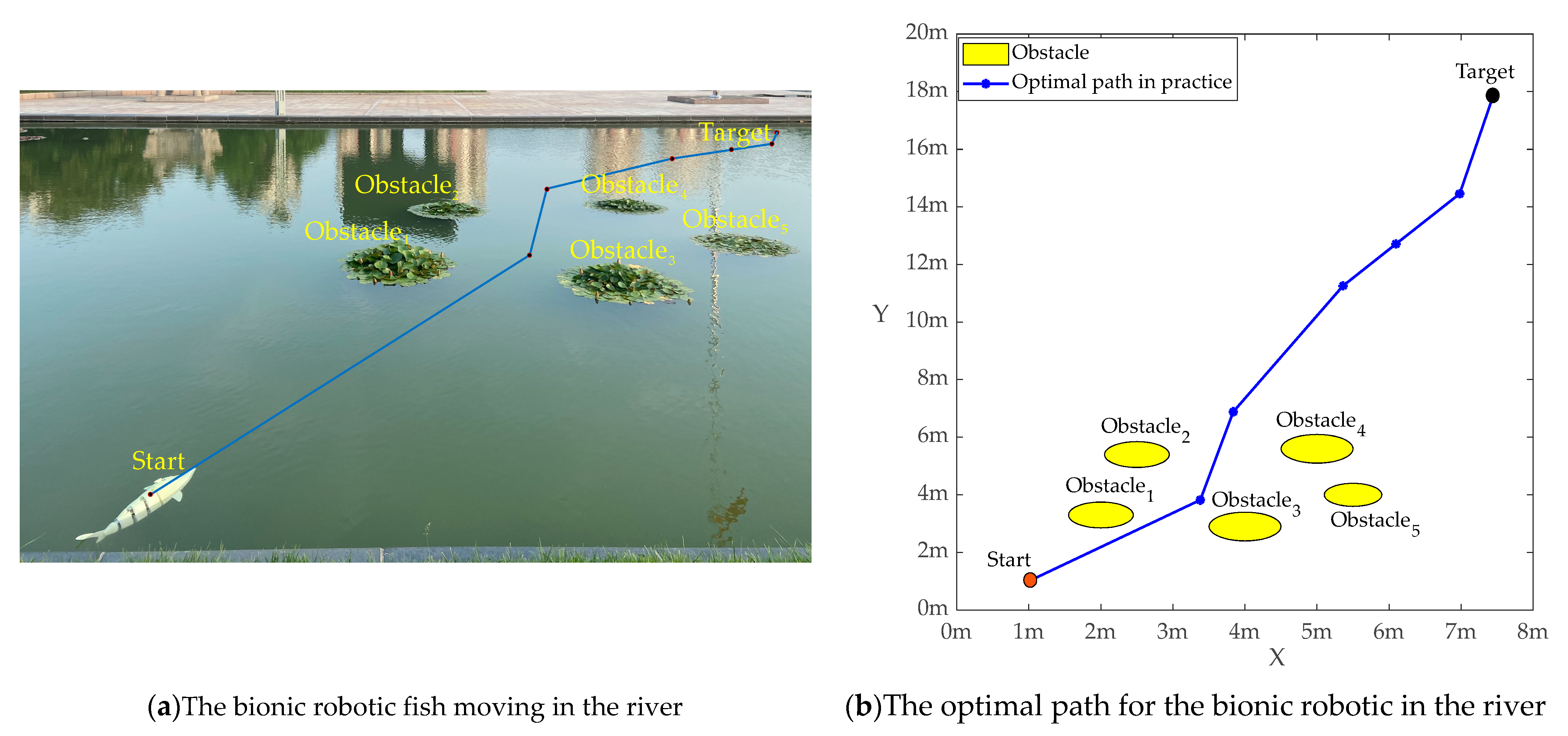
In order to test the effectiveness of the proposed algorithm in practice, the proposed algorithm is used for our designed bionic robotic fish in the river of our university. Based on the distance measuring equipment,
Figure 12 gives the map for the path planning of the bionic robotic fish.
Figure 12 shows the real bionic robotic fish moving in the river,
Table 6 shows the basic parameters of the obstacles, the start and goal points are
and
respectively. It assumes that the design consideration of ocean currents is in the range of
, the direction of ocean currents is stochastic. In order to better illustrate the effectiveness of the proposed algorithm, it sets that the designed bionic robotic fish works in a plane without up and down motion. In
Figure 12, based on the optimal path planning with the worst ocean currents, it obtains a non-collision path in practice, the corresponding path length is 17.27
, the energy consumption is 0.83
. In practice, the energy is 0.69 without the ocean currents. Without the real time value of ocean currents, the bionic robotic fish can obtain a non-collision path with low energy consumption.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}