
Design of Hybrid-Electric Megayachts: The Impact of Operative Profile and Smart Berthing Infrastructures


Abstract
:1. Introduction
2. The Megayacht and the Analysed Propulsive Configurations
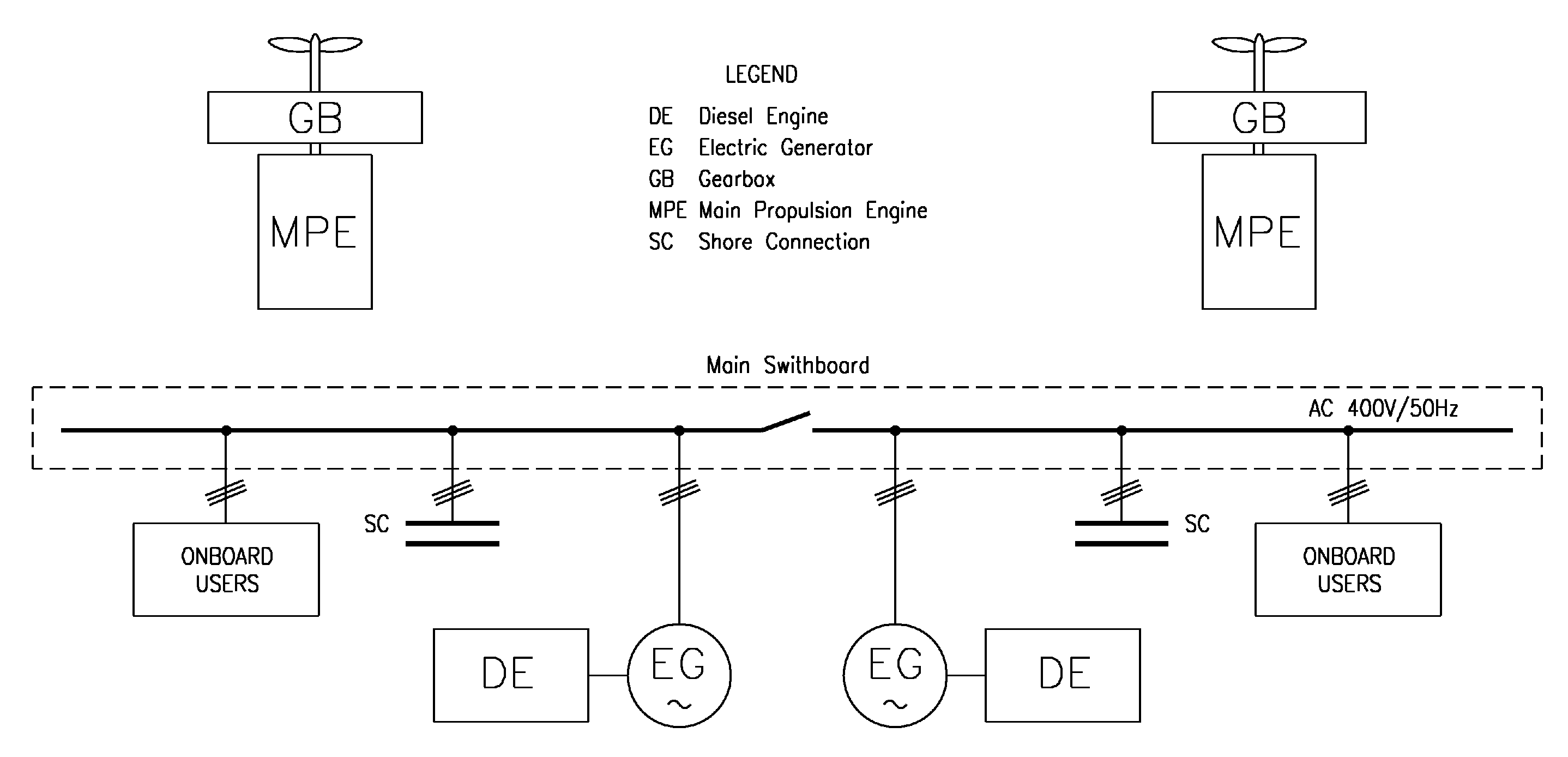
2.1. Configuration C0
2.2. Configuration C1
2.3. Configuration C2
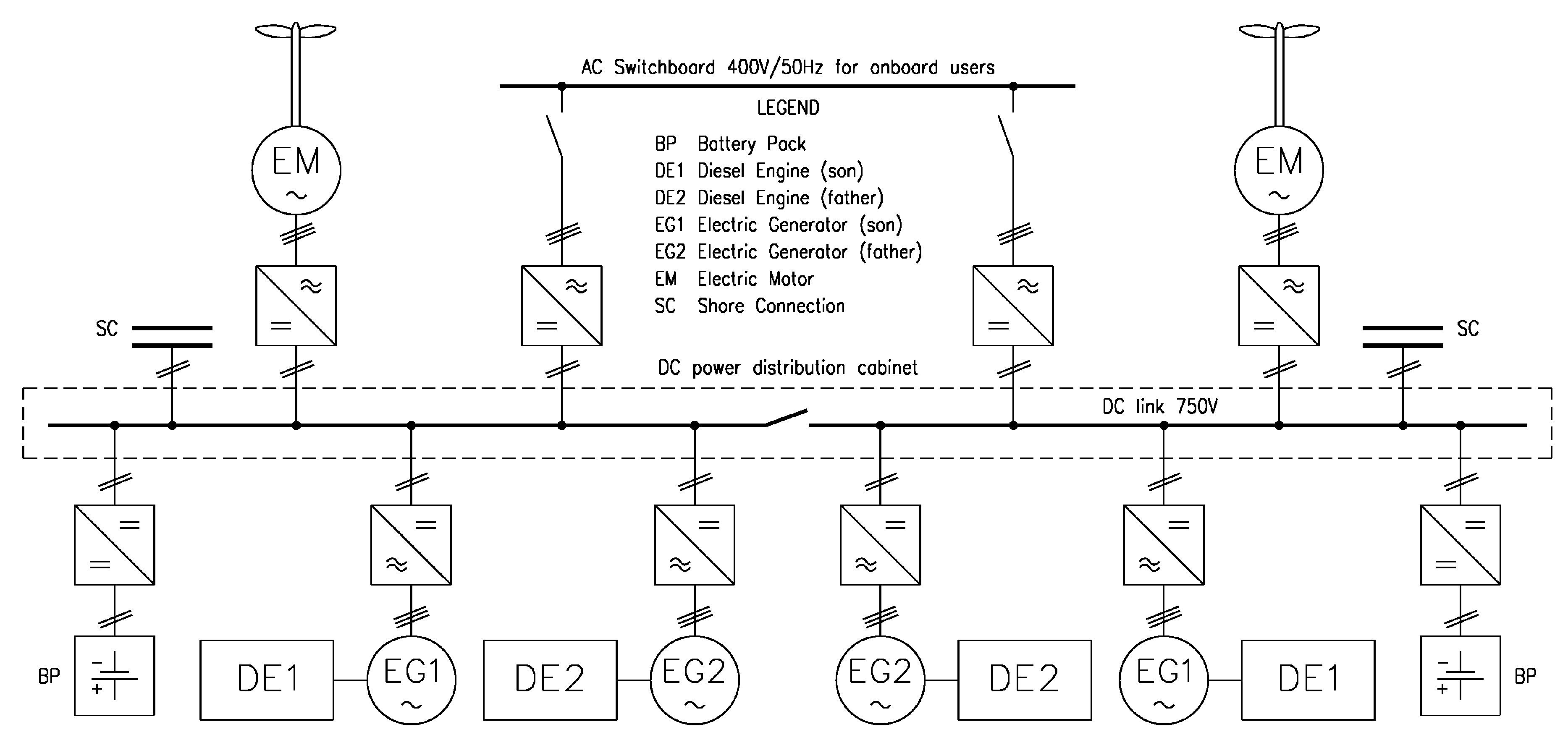
2.4. Configuration C3
3. Power Balance
- A.
- Manoeuvring: in this mode, the vessel is inside the harbour/marina area and is approaching the berthing operations. During this phase, the main propulsion load is low, while almost all the loads is absorbed by manoeuvring equipments (rudders and thrusters).
- B.
- Cruise speed (day): in this mode, the vessel is sailing at the cruise speed during daily hours. Propulsion load is predominant but a consistent hotel load may be present.
- C.
- Cruise speed (night): in this mode, the vessel is sailing at the cruise speed during night hours. Compared to mode B, the hotel load is lower.
- D.
- Maximum speed: in this mode, the vessel is sailing at the maximum speed . This is the mode where all the available propulsive power is used, while hotel loads are comparable with mode B.
- E.
- Anchor stationing: in this mode the vessel is stationing at anchor. There are no propulsive loads and the electrical loads are covering all the energy demand including hotel and auxiliary equipment.
- F.
- Berthed: in this mode the vessel is berthed in a marine. There are no propulsive loads and the electrical loads are covering all the energy demand including hotel and auxiliary equipment.
- 1.
- Propulsive loads: this category includes only the loads needed for the propulsion at the different service speeds, means the loads of the Diesel engines in configuration C0.
- 2.
- Electric loads: this category includes all the loads that are supplied by the diesel generators in configuration C0, thus including hotel loads, auxiliary and manoeuvring systems.
3.1. Propulsive Loads
3.2. Electric Loads
4. Operative Profiles
4.1. Dynamic Operative Profiles
4.1.1. Profile Generation
- 1.
- Divide the 3600 h of operation in step of 1 h.
- 2.
- Start allocating all berthing hours (mode F) among long stays. is chosen randomly in , ensuring at list 5 h between consecutive stays.
- 3.
- Allocate a manoeuvring hour (mode A) prior and after each berthing states, to ensure a low speed approach from and to the berthing place.
- 4.
- Randomly allocate the other modes ensuring that also after an anchor stationing (mode E), a manoeuvre occurs.
4.1.2. Fuel Consumption Calculation
- 1.
- Determination of the average total loads to be supplied during the current hour of operation.
- 2.
- Verification of the battery status, i.e., if they are available to supply energy or need to be recharged.
- 3.
- Determination of the loads to be supplied by each diesel engine.
- 4.
- Evaluation of the total fuel consumption for the considered hour.
5. Smart Berthing Infrastructures
5.1. The ZEMar Concept
- a.
- Fast recharge capabilities for onboard energy storage systems.
- b.
- Optimal management and exploitation of renewable energy sources for the supply of Alternative Maritime Power (AMP) installed in or nearby the Marina (e.g., photovoltaic or wind power plants).
- c.
- Additional supply of ancillary services, as local buffer energy storage to external distribution network.
- a.
- Drop of global pollutant emissions due to fossil sources energy exploitation.
- b.
- Reduction of energy purchasing costs from the Distribution System Operator(DSO).
- c.
- Possibility to sell storage service to the DSO, using also berthed yachts as additional capacity.
5.2. ZEMar Impact on Megayacht Consumptions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Alternate Current |
| AMM | Automatic Metering Management |
| AMP | Alternative Maritime Power |
| BP | Battery Pack |
| CFD | Computational Fluid Dynamics |
| DE | Diesel Engine |
| DC | Direct Current |
| EG | Electric Generator |
| EM | Electric Motor |
| IPD | Interface Protection Device |
| IPES | Integrated Power and Energy System |
| ITTC | International Towing Tank Conference |
| PLC | Power Line Communication |
| PM | Particulate Matter |
| PTI | Power Take In |
| PTO | Power Take Off |
| RANSE | Reynolds Averaged Navier-Stokes Equations |
| RMS | Root Mean Square |
| SFOC | Specific Fuel Oil Consumption |
| SOC | State Of Charge |
| ZEM | Zero Emission Mode |
| ZEMar | Zero Emission Marina |
References
- IMO. International Convention for the Prevention of Pollutions from Ships, Regulations 13–14, Annex VI; Technical Report, MARPOL; IMO Publishing: London, UK, 2018. [Google Scholar]
- Ruggero, V. Study on the evolution of large yacht project and construction as consequence of environmental rules. Procedia Manuf. 2020, 42, 30–34. [Google Scholar] [CrossRef]
- Altosole, M.; Campora, U.; Laviola, M.; Zaccone, R. High efficiency waste heat recovery from dual fuel marine engines. In Technology and Science for the Ships of the Future, Proceedings of the NAV 2018: 19th International Conference on Ship and Maritime Research, Trieste, Italy, 20–22 June 2018; IOS Press: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Altosole, M.; Campora, U.; Figari, M.; Laviola, M.; Martelli, M. A diesel engine modelling approach for ship propulsion and real-time simulators. J. Mar. Sci. Eng 2019, 7, 138. [Google Scholar] [CrossRef] [Green Version]
- Dodero, M.; Bertagna, S.; Marinó, A.; Bucci, V. Performance in-live of marine engines: A tool for its evaluation. Appl. Sci. 2020, 10, 5707. [Google Scholar] [CrossRef]
- Mocerino, L.; Rizzuto, E. Computer model application to the evaluation of energy efficiency measures for cruise ships. In Sustainable Development and Innovations in Marine Technologies, Proceedings of the 18th International Congress of the International Maritime Association of the Mediterranean IMAM 2019, Varna, Bulgaria, 9–11 September 2019; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Mocerino, L.; Rizzuto, E. Preliminary approach to the application of the environmental ship index. In Sustainable Development and Innovations in Marine Technologies, Proceedings of the 18th International Congress of the International Maritime Association of the Mediterranean IMAM 2019, Varna, Bulgaria, 9–11 September 2019; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Ruggiero, V. New methodology to approach project of small hybrid propulsion passenger ferries for italian scenario. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM 2020, Naples, Italy, 24–26 June 2020. [Google Scholar]
- Bucci, V.; Marinó, A.; Businaro, A. The new hybrid small pasenger vessel for the Venice Lagoon. In Proceedings of the 18th International Conference on Ships and Shipping Research NAV 2015, Lecco, Italy, 24–26 June 2015. [Google Scholar]
- Bucci, V.; Mauro, F.; Marinó, A.; Bosich, D.; Vicenzutti, A.; Sulligoi, G. Integrated design of a hybrid-electric power system for coastal-navigation multi-purpose crafts. In Proceedings of the 12th International Conference on Ecological Vehicles and Renewable Energies EVER 2017, Belfort, France, 14–17 January 2017. [Google Scholar]
- Niessink, R. Electric propulsion optimization for fast yachts. In Proceedings of the 24th International HISWA Symposium on Yacht Design and Yacht Construction, Amsterdam, The Netherlands, 14–15 November 2016. [Google Scholar]
- Bucci, V.; Marinó, A. A new proposal for the propulsion of a hybrid motor-sailer catamaran. In Proceedings of the 17th International Conference on Ships and Shipping Research NAV 2012, Napoli, Italy, 17–19 October 2012. [Google Scholar]
- Vicenzutti, A.; la Monaca, U.; Bosich, D.; Bucci, V.; Marinó, A.; Sulligoi, G.; Pelaschiar, R. Early-stage design of shipboard integrated power systems: CSI-based multiple solutions comparison. In Proceedings of the IEEE Electric Ship Technologies Symposium, ESTS 2017, Washington, DC, USA, 15–17 August 2017. [Google Scholar]
- Altosole, M.; Campora, U.; Vigna, V. Energy efficiency analysis of a flexible marine hybrid propulsion system. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM 2020, Sorrento, Italy, 24–26 June 2020. [Google Scholar]
- Sulligoi, G.; Bosich, D.; Pelaschiar, R.; Lipardi, G.; Tosato, F. Shore-to-Ship Power. Proc. IEEE 2015, 103, 2381–2400. [Google Scholar] [CrossRef]
- Geertsma, R.; Negenborn, R.; Visser, K.; Hopman, J. Design and control of hybrid power and propulsion systems for smart ships: A review of developments. Appl. Energy 2017, 194, 30–54. [Google Scholar] [CrossRef]
- Bucci, V.; Marinó, A.; Bosich, D.; Sulligoi, G. The design of a slow-cruising superyacht with zero emission navigation and smart berthing modes. In Proceedings of the 9th International Conference on Ecological Vehicles and Renewable Energies EVER, Monte-Carlo, Monaco, 25–27 March 2014. [Google Scholar]
- Boselli, A.; de Marco, C.; Mocerino, C.; Murena, L.; Quaranta, F.; Rizzuto, E.; Sannino, A.; Spinelli, N.; Xuan, W. Evaluating LIDAR sensors for the Survey of Emissions from ship at Harbour. Lect. Notes Civ. Eng. 2021, 64, 784–796. [Google Scholar]
- Holtrop, J.; Mennen, G. An approximate power prediction method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- Holtrop, J. A statistical resistance prediction method with a speed dependent form factor. In Proceedings of the SMSSH, Varna, Bulgaria, October 1988. [Google Scholar]
- Holtrop, J. A statistical Re-Analysis of Resistance and Propulsion Data. Int. Shipbuild. Prog. 1984, 31, 272–276. [Google Scholar]
- Georgescu, I.; Godjevac, M.; Visser, K. Efficiency constraints of energy storage for onboard power systems. Ocean Eng. 2018, 165, 239–247. [Google Scholar] [CrossRef]
- Bucci, V.; Marinó, A.; Bosich, D.; Sulligoi, G. Inland waterways gas-fuelled vessels: An innovative proposal of a hybrid ship for the European network. In Proceedings of the International Conference ESARS, Aachen, Germany, 3–5 March 2015. [Google Scholar]
- van Loon, P.; van Zoon, P. From operational profile to hybrid propulsion. In Proceedings of the 24th International HISWA Symposium on Yacht Design and Yacht Construction, Amsterdam, The Netherlands, 14–15 November 2016. [Google Scholar]
- Bucci, V.; Marinó, A.; Mauro, F. A new concept design solution for pleasure sailing yachts. In Proceedings of the MARTEC 2016-3rd International Conference on Maritime Technology and Engineering, Lisbon, Portugal, 4–6 July 2016. [Google Scholar]
- Su, C.; Liao, C. Ship electrical load analysis considering power generation efficiency. In Proceedings of the 2015 IEEE/IAS 51st Industrial Commercial Power Systems Technical Conference (I CPS), Calgary, AB, Canada, 6–8 May 2015; pp. 1–11. [Google Scholar]
- Gualeni, P.; Fiore, G.; Maggioncalda, M.; Marsano, G. Life Cycle Performance Assessment Tool Development and Application with a Focus on Maintainence Aspects. J. Mar. Sci. Eng. 2019, 7, 280. [Google Scholar] [CrossRef] [Green Version]
- Sui, C.; de Vos, P.; Stapersma, D.; Visser, K.; Ding, Y. Fuel Consumption and Emissions of Ocean-Going Cargo Ship with Hybrid Propulsion and Different Fuels over Voyage. J. Mar. Sci. Eng. 2020, 8, 588. [Google Scholar] [CrossRef]
- Zaccone, R.; Ottaviani, E.; Figari, M.; Altosole, M. Ship vojage optimization for the safe and energy-efficient navigation: A dynamic programming approach. Ocean Eng. 2018, 153, 215–224. [Google Scholar] [CrossRef]
- Menna, A.; Perra, F.; Altosole, M.; Figari, M.; Piastra, F. The influence of the operational scenarios on the propulsion system selection in the preliminary naval ship design. In Proceedings of the 18th International Conference on Ships and Shipping Research NAV 2015, Lecco, Italy, 24–26 June 2015. [Google Scholar]
- Roy, J.; Shallcross, P.; Hardy, A.; Burnay, S. Reducing the environmental impact of large yacht. In Proceedings of the RINA Superyacht Conference, Coventry, UK, 14–15 September 2011. [Google Scholar]
- Miceli, R. Energy management and smart grids. Energies 2013, 6, 2262–2290. [Google Scholar] [CrossRef] [Green Version]
- Tabari, M.; Yazdani, A. A DC distribution system for power system integration of Plug-In Hybrid Electric Vehicles. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Raveendran, V.; Shanthisree, S.W.; Swathy, K.; Nair, M.G.; Alvarez-Bel, C. Vehicle-to-grid ancillary services using intelligent green eectric vehicle charging infrastructure in smartgrid. Int. J. Power Energy Syst. 2020, 40, 18–28. [Google Scholar]
- Lughi, V.; Massi Pavan, A.; Quaia, S.; Sulligoi, G. Economical Analysis and Innovative Solutions for Grid Connected PV Plants. In Proceedings of the IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM, Ischia, Italy, 11–13 June 2008. [Google Scholar]
- IEEE. IEEE Guide for Design, Operation and Integration of Distributed Resource Island Systems with Electric Power Systems, IEEE Std 1547.4-2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Andrade, F.; Cardenas, J.J.; Romeral, L.; Cusido, J. Modeling and studying of power flow in a parking lot with plug -in vehicles and the impact in the public utility. In Proceedings of the IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012. [Google Scholar]
- Koyanagi, F.; Yokohama, R. A priority order solution of EV recharger installation by domain division approach. In Proceedings of the 45th International Universities Power Engineering Conference UPEC2010, Cardiff, UK, 31 August–3 September 2010. [Google Scholar]
- Brenna, M.; Foiadelli, F.; Zaninelli, D. Power and energy estimation for Plug-In electric vehicles recharge in metropolitan area. In Proceedings of the 11th International Conference on Electrical Power Quality and Utilisation, Lisbon, Portugal, 17–19 October 2011. [Google Scholar]
- Hema, V.K.; Dhanalakshmi, R. Analysis of power sharing on hybrid AC-DC microgrid. In Proceedings of the 2014 Annual International Conference on Emerging Research Areas: Magnetics, Machines and Drives (AICERA/iCMMD), Kottayam, India, 24–26 July 2014. [Google Scholar]
- IEC. IEC/PAS 80005-3:2014 Utility Connections in Port-Part 3: Low Voltage Shore Connection (LVSC) Systems-General Requirements; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Guerrero, J.M.; Loh, P.C.; Lee, T.; Chandorkar, M. Advanced Control Architectures for Intelligent Microgrids - Part II: Power Quality, Energy Storage, and AC/DC Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1263–1270. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Symbol | Value | Unit |
|---|---|---|---|
| Length overall | 72.0 | m | |
| Waterline length | 69.2 | m | |
| Breadth | B | 11.7 | m |
| Draught | T | 2.9 | m |
| Displacement | 1281.7 | ton | |
| Maximum speed | 17.0 | kn | |
| Cruise speed | 13.0 | kn | |
| ZEM speed | 6.5 | kn |
| Quantity | Symbol | Value | Unit |
|---|---|---|---|
| Propeller diameter | D | 1.9 | m |
| Pitch diameter ratio | 1.034 | - | |
| Blade area ratio | 0.657 | - | |
| No. propeller blades | Z | 5 | - |
| Maximum available power | 2536 | kW | |
| Maximum achievable speed | 17.33 | kn | |
| Propeller revolutions at | N | 356.6 | RPM |
| Wake fraction at | w | 0.103 | - |
| Thrust deduction at | t | 0.120 | - |
| Mode | Power (kW) | ||
|---|---|---|---|
| Electric | Propulsion | ||
| A | Manoeuvring | 276 | 110 |
| B | Cruise speed day hours | 258 | 974 |
| C | Cruise speed night hours | 201 | 974 |
| D | Maximum speed | 249 | 2346 |
| E | Anchor Stationing | 255 | 0 |
| F | Berthed | 238 | 0 |
| Mode | % of Operative Time | |||
|---|---|---|---|---|
| Profile 1 | Profile 2 | Profile 3 | Profile 4 | |
| A | 4.8% | 8.0% | 11.2% | 14.4% |
| B + C | 8.4% | 14.0% | 19.6% | 25.2% |
| D | 1.8% | 3.0% | 4.1% | 5.4% |
| E | 43.4% | 38.0% | 33.2% | 28.1% |
| F | 41.6% | 37.0% | 31.9% | 26.9% |
| Conf. | Fuel Consumption per Year (Ton) | |||
|---|---|---|---|---|
| Profile 1 | Profile 2 | Profile 3 | Profile 4 | |
| C0 | 316 | 389 | 462 | 534 |
| C1 | 290 | 370 | 451 | 531 |
| C2 | 287 | 365 | 443 | 521 |
| C3 | 324 | 401 | 490 | 573 |
| Conf. | % G Mode | Fuel Consumption Per Year (Ton) | |||
|---|---|---|---|---|---|
| Profile 1 | Profile 2 | Profile 3 | Profile 4 | ||
| C1 | 10 | 283 | 364 | 444 | 527 |
| 20 | 277 | 357 | 441 | 522 | |
| 30 | 271 | 351 | 437 | 518 | |
| 40 | 265 | 347 | 431 | 514 | |
| 50 | 263 | 343 | 429 | 513 | |
| C2 | 10 | 279 | 359 | 437 | 518 |
| 20 | 274 | 352 | 433 | 512 | |
| 30 | 267 | 347 | 430 | 507 | |
| 40 | 263 | 343 | 423 | 504 | |
| 50 | 260 | 339 | 419 | 500 | |
| C3 | 10 | 318 | 397 | 482 | 571 |
| 20 | 311 | 390 | 479 | 565 | |
| 30 | 305 | 383 | 475 | 559 | |
| 40 | 299 | 379 | 469 | 557 | |
| 50 | 297 | 374 | 463 | 553 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mauro, F.; Ghigliossi, E.; Bucci, V.; Marinó, A. Design of Hybrid-Electric Megayachts: The Impact of Operative Profile and Smart Berthing Infrastructures. J. Mar. Sci. Eng. 2021, 9, 186. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020186
Mauro F, Ghigliossi E, Bucci V, Marinó A. Design of Hybrid-Electric Megayachts: The Impact of Operative Profile and Smart Berthing Infrastructures. Journal of Marine Science and Engineering. 2021; 9(2):186. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020186
Chicago/Turabian StyleMauro, Francesco, Elia Ghigliossi, Vittorio Bucci, and Alberto Marinó. 2021. "Design of Hybrid-Electric Megayachts: The Impact of Operative Profile and Smart Berthing Infrastructures" Journal of Marine Science and Engineering 9, no. 2: 186. https://0-doi-org.brum.beds.ac.uk/10.3390/jmse9020186