
Magnetic Trails: A Novel Artificial Pheromone for Swarm Robotics in Outdoor Environments



1
Mechatronics Engineering Area, Costa Rica Institute of Technology, Cartago 30101, Costa Rica
2
Institute of Automation and Industrial Computation (ai2), Universitat Politècnica de València (UPV), 46022 Valencia, Spain
*
Author to whom correspondence should be addressed.
†
Ph.D. Student in Automation, Robotics and Industrial Computer Science, Universitat Politècnica de València, Spain.
Computation 2022, 10(6), 98; https://0-doi-org.brum.beds.ac.uk/10.3390/computation10060098
Submission received: 30 April 2022
/
Revised: 8 June 2022
/
Accepted: 13 June 2022
/
Published: 15 June 2022
(This article belongs to the Special Issue Bioinspiration: The Path from Engineering to Nature)
Abstract
:Swarm robotics finds inspiration in nature to model behaviors, such as the use of pheromone principles. Pheromones provide an indirect and decentralized communication scheme that have shown positive experimental results. Real implementations of pheromones have suffered from slow sensors and have been limited to controlled environments. This paper presents a novel technology to implement real pheromones for swarm robotics in outdoor environments by using magnetized ferrofluids. A ferrofluid solution, with its deposition and magnetization system, is detailed. The proposed substance does not possess harmful materials for the environment and can be safely handled by humans. Validation demonstrates that the substance represents successfully pheromone characteristics of locality, diffusion and evaporation on several surfaces in outdoor conditions. Additionally, the experiments show an improvement over the chemical representation of pheromones by using magnetic substances and existing magnetometer sensor technologies, which provide better response rates and recovery periods than MOX chemical sensors. The present work represents a step toward swarm robotics experimentation in uncontrolled outdoor environments. In addition, the presented pheromone technology may be use by the broad area of swarm robotics for robot exploration and navigation.
1. Introduction
Swarm robotics is a wide and dynamic research area. Several models and behaviors for swarms involve the use of a bio-inspired principle: pheromones. The representation of pheromones in robotics experiments has ranged from simulation, virtual pheromones and real implementations. However, these representations have been performed in controlled indoor environments. Swarm robotics using pheromones in outdoor environments are still an unexplored area.This paper presents a novel pheromone technology for swarm robotics aimed at such outdoor conditions.
When multiple mobile robots are used to achieve a common goal, it is considered a multi-robot system. If this multi-robot system presents some level of coordination or communication among robots, it is also considered a robot swarm [1]. A common characteristic of robot swarms is the limited capacity of each individual. These robots are usually simpler, technologically, than state-of-the-art mobile robots. This also limits the range of methodologies that can be applied for navigation, localization and mapping [2]. Navigation is one of the most complex problems in mobile robotics. Moving successfully to a goal point involves integrating perception systems, localization in space, movement computation and locomotion actuator control [3]. A new communication and coordination method should consider this characteristic to maintain the low cost of individual robots and to foresee scalability.
Stigmergy is the natural technique for indirect communication, where a message is transmitted and received at different times. Pheromones are an example of stigmergy since their deposition and then detection by another individual occur in different moments. They present several characteristics, such as locality, diffusion, and evaporation [4,5]. Simulations are a valuable tool to test swarm models and behaviors with pheromones. Swarm robotics in reality may use virtual representations of pheromones. They employ a smart environment, such as screens, projectors or a centralized control, to represent pheromones. The disadvantage of this approach is the limitation to a controlled indoor environment. Real implementation has been done by using a combination of special surfaces and sensors (e.g., UV light and UV sensitive floor), and by using chemical substances (e.g., alcohol, and VOC), also in controlled environments. Current chemical sensors present large noise values, slow response times and large recovery periods, which limit their use to detect pheromone gradients [6].
The present paper describes a real pheromone substance implemented with magnetized ferrofluids for swarm robotics in outdoor environments. The validation methodology aims to certify its use as a pheromone. Experiments highlight the key characteristics of pheromones: locality, diffusion, and evaporation. Validation also identifies the results of the substance on different types of surfaces in uncontrolled outdoor environments. Finally, the response of the magnetometer sensor on pheromone presence is presented to identify advantages over chemical sensors.
Ferrofluids are defined as colloidal substances composed of small particles of a ferromagnetic material suspended in a carrier liquid. This type of substance presents important magnetic features that change the properties of the material when it is exposed to a magnetic field [7]. In ferrofluids, particle sizes in the nanometer range are used. Contrarily, if particles are larger (sizes on microns), it is called a magnetorheological fluid. Smaller particle sizes present higher suspension stability in the solution [8]. Iron oxide (), also called magnetite, is one of most common type of magnetic solids that may be used in ferrofluids. It presents substantial properties, such as biodegradability, biocompatibility, minimal toxicity, high magnetic susceptibility and superparamagnetism [9]. When a strong magnetic field is applied to a ferrofluid, magnetite particles become oriented in the direction of the field and become magnetized [8].
The swarm robotics research group at Costa Rica Institute of Technology (PROE research project) have proposed several exploration behaviors that use pheromone principles. In [10], they reported faster coverage ratios than behaviors without pheromones. Currently, the group is looking to evolve their experimentation on swarm robotics with pheromones from simulations into reality. This paper is part of that effort. The Institute of Automation and Industrial Computation (ai2) at Universitat Politècnica de València (UPV) in Spain, has provided supervision during the formulation and execution of the pheromone research.
This paper is structured as follows: the next section presents a review on the state of the art of pheromone representation in swarm robotics. Then, the Problem Statement section summarizes the research problem in order to understand the need for a new type of pheromone. The Methods and Materials section presents details on pheromone formulation and the designed deposition system. The Experiments and Results section presents validation of the pheromone, its use on several surfaces and the sensor response. Finally, the main conclusions from the present work are discussed.
2. Background and Related Work
This section summarizes the state of the art on swarm robotics research with pheromone representation. An introduction to swarm robotics and its main characteristics is presented. The organization of robot communication as direct and indirect is explained with a special focus on indirect communication characteristics. Finally, pheromone representation in the literature is presented with subsections for simulation, virtual and real pheromones.
2.1. Swarm Robotics Research
Research on swarm robotics finds inspiration from nature collective behaviors. Biological systems, such as ant or bee colonies, achieve collaborative tasks, such as exploring or foraging for food. Understanding and studying swarm paradigms may offer solutions to present complex problems.
Swarm robotics is an active research area. It offers several advantages, such as the possibility to scale the capacity of a robot. For example, sensing the environment in large groups expands each robot capacity. Additionally, it provides robustness against individual failures due to the redundancy of robots. Finally, the workload distribution for a task reduces the required complexity of each robot [11].
Collective behaviors are coordinated by the interaction of multiple robots. That interaction happens by some means of communication. There are several communication schemes in a swarm. Centralized schemes use a central coordinator for communication to each robot and data collection. It provides a more predictive and easier implementation than decentralized schemes since data flow concurs to a single point. However, its downside is that this scheme limits the possibility to scale up swarm sizes and is sensible to failures on the central coordinator. On the other hand, a decentralized communication scheme is often desired in swarm robotics. It aims for robot–robot communication without the use of a central coordinator. Pheromones are used to implement decentralized communication between robots in order to coordinate a common behavior. They provide a communication and coordination scheme that can be scaled to larger swarm sizes. This scheme also provides robustness against the loss of individuals on the swarm [12]. As is presented in the next sections, the implementation of decentralized communication schemes are still an area of development.
2.2. Direct Communication and Coordination in Swarm Robotics
Current robot communication and coordination might also be classified as direct or indirect. Direct communication is when a message is transmitted and received in such a short period of time that it is considered simultaneous. This is the case of radio frequency, Wi-Fi, Bluetooth or similar technologies.
As stated previously, decentralized communication and coordination is one of the main goals when using robotic swarms. It presents the advantage of robustness on individual failures, flexibility and scalability on swarm size. However, direct communications may rely on a central base for message coordination and may use fixed robot identifiers, which contradicts the decentralization goal of robot swarms [5]. A failure on the base or even on an individual robot might crash the entire communication system.
There have been research efforts to implement a direct and decentralized communication scheme for swarm robotics, for example, infra-red light messages between robots [13] and the use of LEDs and cameras [14]. Those implementations were characterized by a limited range and bandwidth of communication, a trade off versus the use of a central base. Finally, there have been mixed implementations with messages from robot to base and robot to robot [15].
2.3. Indirect Coordination and Communication “Stigmergy”
Indirect communication in robotics refers to coordination methodologies, in which message creation and reception are performed at different times. In nature, this concept is known as stigmergy. It is notorious in that usually the environment has to be modified to achieve time separation for a message [16].
One of the most familiar representations of stigmergy on biological systems is the use of pheromones by ant colonies to mark a trail. Ants deposit pheromones and other ants detect them at another time. This is an example of positive feedback from the pheromone to the system and an attractive behavior in ants. However, stigmergy might represent negative feedback to the system, as in the case of danger pheromones and repulsive behaviors on ants [4].
Pheromones in nature present some key characteristics that define them [5]:
- Locality: Pheromones are attached to a static position in space. This is an indication of how insects or swarm agents modify their space to transmit a message.
- Diffusion: Pheromone concentration presents a gradient function. An area in space presents a maximum value and decays as the distance increases.
- Evaporation: Concentration levels of pheromones decay as a function of time. This characteristic makes indirect communication non-permanent.
Swarm robotics research has embraced the concept of stigmergy since indirect communication may serve to implement decentralized communication schemes. Several research groups have tried to replicate pheromones and their related colony behaviors. A variety of pheromone approaches have taken place, ranging from simulated and virtual pheromones to real substances.
2.4. Simulated Implementations of Pheromones
Simulation provides a valuable tool to validate swarm mathematical models before implementation in real robotic systems. Swarm behavior models that use pheromones have appeared in many research publications, in which simulations were used to tune parameters and validate results.
An extension of ant foraging behavior by including pheromone principles was proposed by Schroeder et al. [17]. The foraging model known as chemotaxis was adapted to include pheromones with parameters such as diffusion, evaporation rate, and sensed noise intensity. Simulations validated optimal values of pheromone parameters. Song et al. [18] presented the implementation of pheromones by using neural networks (i.e., a dynamic wave expansion neural network). Swarm foraging behavior was modeled by the proposed methodology. Efficiency and coverage rate were evaluated against different algorithms by using simulations. Results showed an improvement in efficiency of a foraging task.
An aggregation algorithm enhanced with pheromones were proposed by Arvin et al. [19]. They conducted experiments using the BEECLUST algorithm on real robots with no pheromones and on simulated robots with pheromones. Diffusion and evaporation were used as experiment variables. The presented results showed an improvement in aggregation times by adding pheromones to the algorithm.
Calderón-Arce et al. [10] presented exploration algorithms with pheromones for robot swarms. By using simulations, an improvement on directional random walk algorithm was reported. The proposed new algorithm (directional pheromone walk) evaluates pheromone intensity around an agent to decide a new movement. Pheromone intensity and evaporation rate were used as possible variables.
A new pheromone model was proposed by Tinoco et al. [20], which uses decentralized pheromone maps on each robot of the swarm. Deposition, evaporation and detection values are stored and updated on local memory, and nearby robots share information on a pheromone map. The proposed model was implemented and validated by using two types of simulations.
When it is desired to move from simulation to reality, a different approach is needed to implement pheromones with robots. A direct nature approach uses real substances that mimic pheromones in nature and sensors that detect them. On the other hand, there exists the possibility to represent pheromones with augmented reality or virtual representations.
2.5. Virtual Implementations of Pheromones
The possibility to implement pheromone characteristics in swarm experiments without the actual use of physical substances, has proved to be a valid alternative in research publications. Controlled environments have been used extensively on previous works with swarm robotics and pheromones.
Smart environments have been implemented by using projectors on the ceiling [21] or large screens on the floor [22,23,24] to simulate pheromones. Concentration and locality of pheromones are represented by light intensity. Evaporation can also be represented and controlled by the screen software. Swarm robots present light sensors to measure concentration.
Augmented reality environments have been used to communicate each robot in a swarm with information, such as location, individual state and state of nearby robots. The state of a robot can be configured as a pheromone gradient. A centralized controller tracks each robot and creates pheromone trail maps [25,26].
Finally, a controlled location planted with RFID tags has also been used to recreate some pheromone characteristics. Robots read and write gradient values on tags. Even evaporation may be represented by using time stamps [27,28].
As useful as this approach has been for research, it presents notorious limitations. It relies on a heavily prepared and controlled space, usually inside a laboratory. Smart environments are limited by screen sizes, which also limit robot and swarm sizes. Additionally, illumination should be carefully controlled to avoid altering measurements on robots. Augmented reality relies on a centralized communication scheme which, as shown in Section 2.1, is prone to failures and is not preferred in swarm robotics. Similarly, the use of RFID tags needs to prepare an environment before experiments. Additionally, since the locations of RFID tags are determined by humans and not swarm agents, it represents a possible deviation in pheromone representation.
2.6. Real Implementations of Pheromones
Realistic implementations of stigmergy in robotic swarms are a challenge that is considered largely unresolved. This paper focus on this type of implementation. There is a large list of research teams that have contributed to the topic. Table 1 shows a timeline of research on this specific problem.
Ink has been used as a simple pheromone to mark robot paths with successful experiments [32]. However, even when ink has locality, its diffusion gradient is almost binary (marked or not marked), and it lacks evaporation representation. Furthermore, this approach requires a controlled surface for the robot swarm to work.
Additionally, there has been used a mix of specific actuators in robots and a special surface. For example, robots with UV light and floor painted with UV sensitive material [39,47] and also robots with a heat source and floor with good thermal conductivity [29]. These approaches have achieved all three characteristics of pheromones; however, they are bounded to a controlled environment with a specific surface.
Finally, pheromones have been represented by a direct bio-inspired approach with the use of gases or volatile organic compounds (VOC). Notable efforts have been made by the University of Monash [33,34,37], University of Coimbra [35], Hachinohe Institute of Technology [5,36,42] and Malaga University [41]. This approach is considered the most similar to pheromones in nature and achieves all of its characteristics. However, its implementation has been limited by the noisy nature of gases in air and the current state of chemical sensor technology.
Most of the chemical sensors used for alcohol and VOC detection are metal–oxide (MOX) sensors. The current state of the art of this sensors provides compact, low-cost and easily access devices. However, it is difficult to identify a proportionality between resistance values versus concentration of particles in air by using MOX sensors. This behavior represents a challenge when measuring concentration gradients for pheromone substances. MOX sensors been very useful for the classification of substance in e-noses, but not for substance quantification. Finally, MOX sensor technology needs recovery time after each measurement, which can vary from seconds to minutes. Consequently, these sensors present low sample rates and limited dynamic characteristics [6,40,48].
Lastly, gases and odors in air present turbulent behavior. Sampling of concentrations may present highly noisy trends since gas plumes alternate zones of high and low concentration. A high sample rate is needed to characterize gases and odors as a gradient and overcome that noisy behavior. However, as stated before, current MOX sensor technology does not meet that requirement [49,50].
3. Problem Description
As mentioned in a previous section, the simulated and virtual representation of pheromones is valuable as a research tool, but the gap from simulation to reality still remains. The present work aims to address that gap by providing a new technology for real pheromone representation.
The state of the art on real pheromones for swarm robotics presents significant roadblocks as a practical tool for experiments. It can be noted that many groups with different timelines have faced the challenge of pheromone representation with real substances (see Table 1). Many challenges were reported by the research teams, almost all of them related to the limitations of current sensor technologies versus the nature of gases in air [34,37,41,42,44].
On the other hand, using virtual environments is a useful tool for experiments but limits swarm robotics research to heavily controlled environments. Applying swarm robots to uncontrolled and outdoor environments is a new research area that needs new tools.
In this work, an artificial ferrofluid pheromone based on magnetic principles is described. The first advantage of this technology consists of using the wide range of magnetic sensors available nowadays, such as magnetometers. This type of sensor is considered to be a mature and stable technology. Commercial magnetometers present low prices, high sensibility and high sample rates. The second advantage represents the possibility to use the pheromone outdoors and in uncontrolled environments. No external devices, special surfaces or central communication are needed. Finally, no harmful materials are selected in the design, which presents a bio-compatible approach for a pheromone substance.
4. Materials and Methods
In this section, the composition of the ferrofluid pheromone is detailed. Two versions were formulated: with and without evaporation representation. Both versions are considered valuable for possible swarm robotics experiments. In order to magnetize the pheromone, a deposition system design is also documented.
4.1. Composition of Ferrofluid Pheromone
The proposed substance to be used as an artificial pheromone consists of a ferrofluid that is magnetized prior to deposition. A solution of magnetite () and water was used. Magnetite was obtained in its synthetic form, as a black iron oxide powder. It is an inexpensive and accessible substance, since it is used as the raw material for paints and printer toner. Water was used as the carrier material and no surfactant was used to keep the solution as simple as possible.
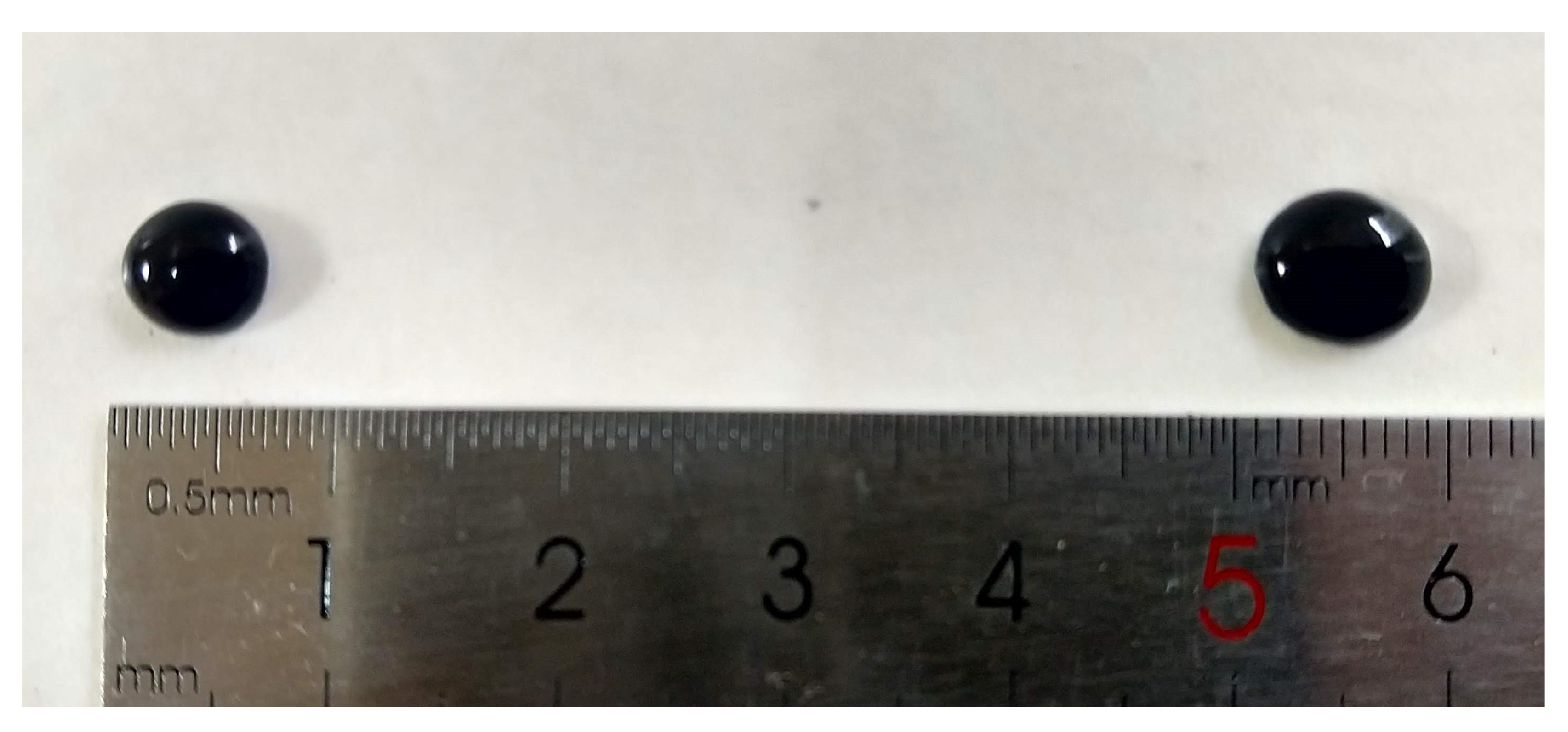
In this paper, two variations of the pheromone formula is presented. On its simpler composition, where the evaporation characteristic is not represented, the solution presents a mixture of 75% (m/v) synthetic powdered magnetite () in purified water. An example of the substance can be seen in Figure 1.
The proposed ferrofluid solution is sensitive to an applied magnetic field, and as it is shown in the Results section, it retains the desired magnetic field. That magnetization effect on the ferrofluid and, therefore, the remaining magnetic field are proportional to the concentration value of the solution. The revised literature presents concentrations from 40% to 80% (m/v) for ferrofluids [51]. When using ferrofluids for a pheromone, high concentrations, in hand with a strong magnetization process, are expected to cause stronger magnetic fields.
In some experiments, it might be desired to decrease or lose that magnetic field over time. This is useful, for example, for swarm experiments that use the evaporation characteristic of pheromones. The net effect of the magnetic field acquired by the ferrofluid does not vary, unless the substance suffers some sort of mechanical motion that breaks the alignment of particles [8], for example, agitation or stirring. The approach used in this research to accomplish that motion was the use of chemical reactions that cause agitation in the material. Therefore, the substance is magnetized prior to deposition and then starts a process of agitation. Several types of chemical reactions may be used on the substance. In the present work, it was preferred a harmless and environmental friendly reaction. A biological reaction was selected, adding yeast and sugar to the mixture. This reaction causes a volume increase in the pheromone substance by the creation of bubbles. Additionally, it presents a reaction process that last several minutes, which is consistent with pheromone evaporation in previous works.
The mixture composition when evaporation is desired consists of the following solution: 20.00% (m/v) synthetic powdered magnetite (), 13.33% (m/v) dry yeast and 20.00% (m/v) white sugar, in purified water (Table 2). This complete solution was used in the evaporation experiment described in the Results section.
It is important to address the safety of the proposed substance, in order to be used in natural environments and handled by humans. A material safety data sheet for synthetic specifies that no exposure limit is established, and according to OSHA, iron oxide is not “extremely hazardous or toxic”. It is also not considered a hazardous waste, and it is not expected to be hazardous to the environment. It is advised to prevent temperatures above 80 °C with synthetic in its powdered form; however, in the pheromone form, that may change since it is diluted in water. The rest of the proposed components of the pheromone substance (water, sugar, and dry yeast) are food-grade ingredients. In summary, this represent a pheromone substance that is safe to interact with humans and causes no harm to the environment.
Some possible considerations about the pheromone substance are detailed. Since is used as a black pigment, it may cause stains and marks on the floor. Additionally, the proposed evaporation methodology causes a reduction in the magnetic field intensity but it does not mean a real evaporation of the substance. Since the proposed ferrofluid pheromone is oriented for outdoors and there is no harmful effect for the environment, those are considered minor issues. The substance is expected to be eventually degraded by climate elements (e.g., rain or wind).
4.2. Detection of Ferrofluid Pheromone
The approach used in this research was to engineer a substance in order to use available sensor technology. This is a diversion from the methodologies documented in the literature review, where pheromones in nature were directly mimicked by using chemical substance and sensors.
Following this, the magnetic field strength was measured using a commercial magnetometer sensor. A magneto-resistive sensor, model QMC5883, was used. It was configured in Continuous Measurement Mode, 200 Hz Output Data Rate, 2 Gauss Range and 64 Over Sampling Rate. Several other models of magnetometers may also be used, such as LIS3MDL. Finally, the sensor was attached to an Adafruit Feather M0 Adalogger for data collection.
4.3. Ferrofluid Pheromone Deposition System
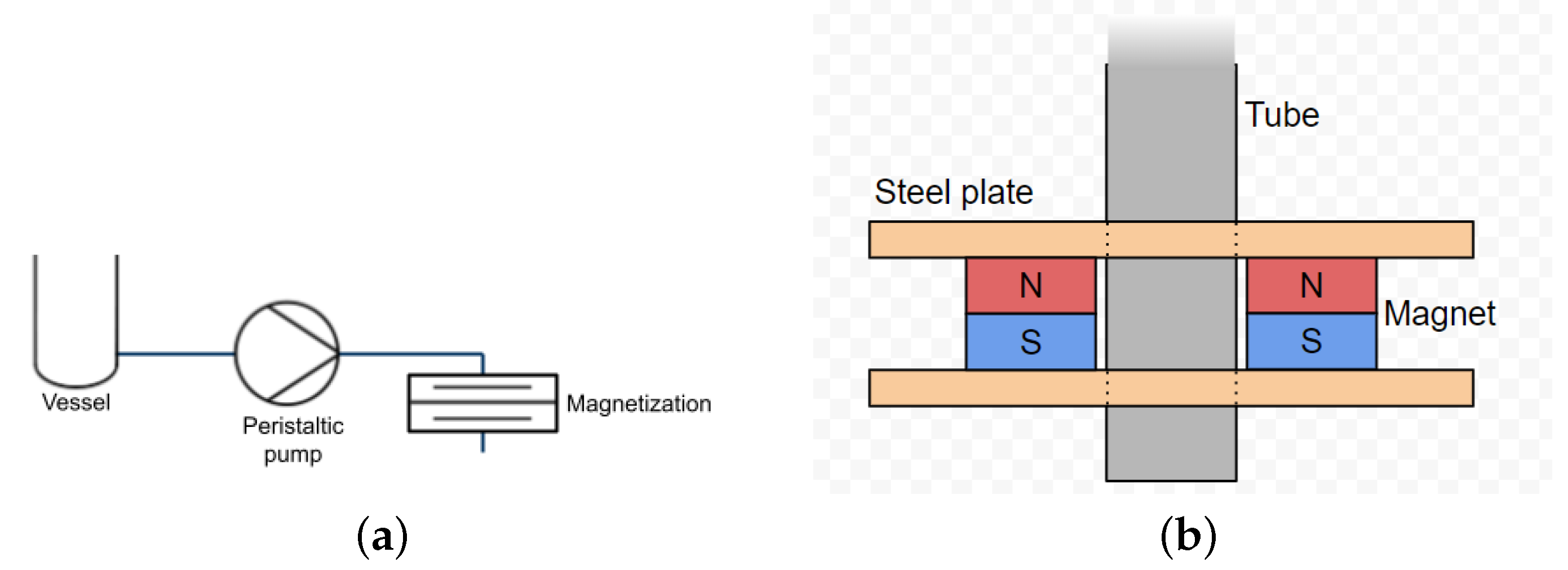
Ferrofluids retain an applied magnetic field after removing the source of such field. There are many possibilities to magnetize the proposed solution. Dropping the substance on the floor and then approaching a magnet or electromagnet presents practical limitations for an autonomous implementation on a mobile robot. For example, the distance from the magnet to the solution could be variable depending on the floor characteristics, thus not giving consistent results. In addition, the substance is attracted to the magnet, which may cause it to return and stick to the robot. In order to minimize those limitations, a deposition system was developed. The proposed design magnetizes the fluid prior to its deposition on the floor. The system consists of a reservoir or vessel, a DC peristaltic pump, and two 10 × 5 mm neodymium magnets (with 2.7 kg of pull force). In Figure 2a, a diagram of the magnetization subsystem is presented.
Magnet positioning is key in the deposition system design (see Figure 2b). Magnets were positioned such that lateral field lines were parallel to the movement of the substance. Otherwise, the magnetic field would oppose the ferrofluid flow. Additionally, steel plates were used above and under the magnets, creating a caged magnetization stage. The magnetic field strength is significantly lower outside the steel plates. The design minimizes the effect of the upper and lower field lines of magnets. Additionally, it ensures that the particle alignment in the ferrofluid remains and prevents return from the liquid.
5. Experiments and Results
The validation methodology in the present paper aims to test and validate the proposed ferrofluid solution and deposition system as a viable pheromone for swarm robotics. Experiments were oriented to validate each of the typical pheromone characteristics: locality, gradient and evaporation on different types of surfaces in uncontrolled conditions. Additionally, an experiment was conducted to evaluate the interaction and response between pheromone and sensor in order to remark the advantages over chemical sensors.
5.1. Locality and Gradient Validation on Several Surfaces
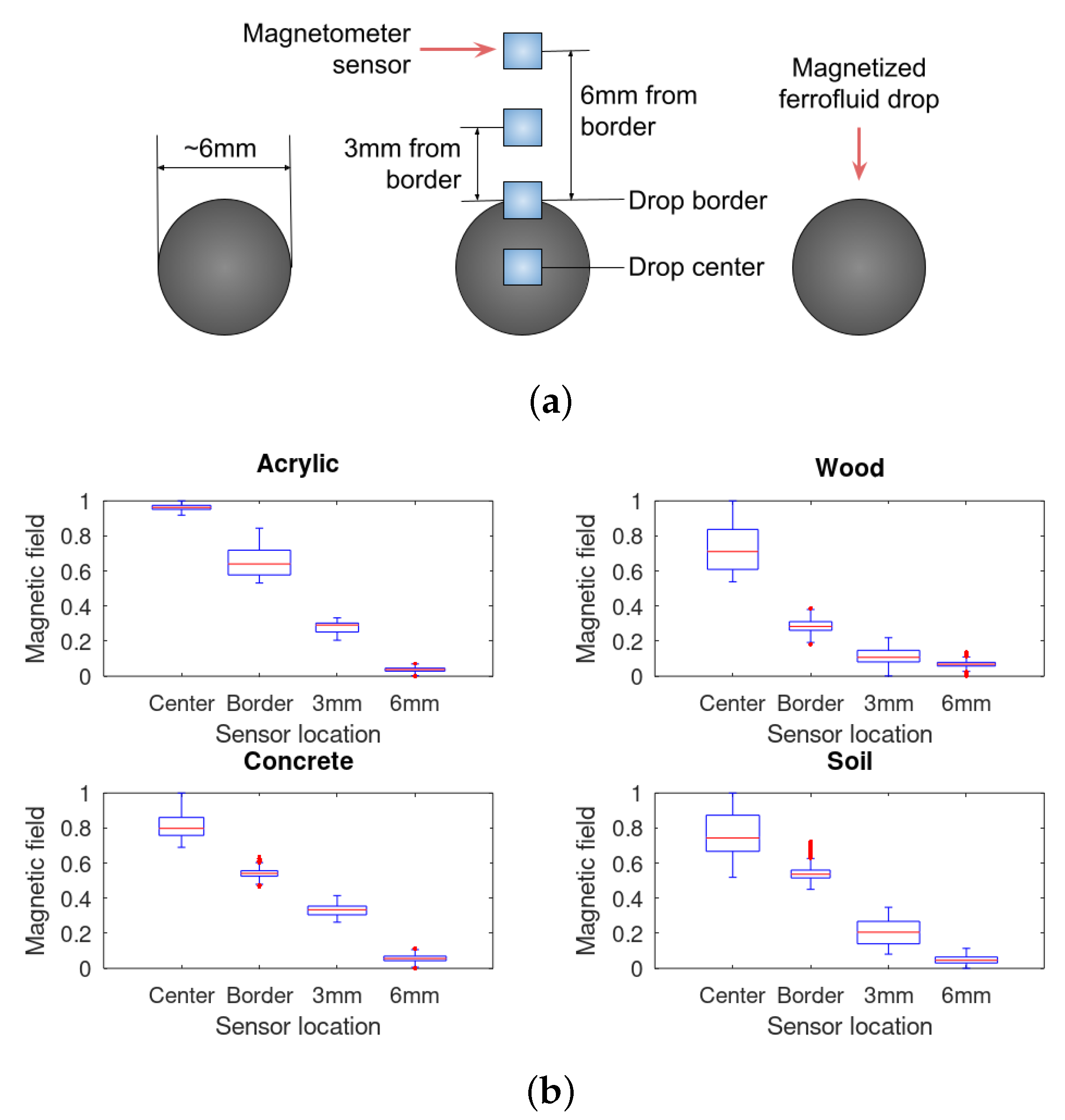
The first experiment aimed to validate the ferrofluid pheromone on several surfaces by identifying its locality and gradient characteristics. The substance version was without evaporation. Selected surfaces were laminated acrylic, pine wood, unfinished concrete and dry soil. Several drops of pheromone were laid in a line. The magnetic field intensity was measured at a drop: at the center and at the border, and then 3 mm and 6 mm away from the border of the drop. All measurements were performed with the magnetometer sensor at 10 mm from the surface level.
In Figure 3b, the experiment results are shown. The measured magnetic field mean was maximal at the center of a drop of pheromone, decreased at its border, lower at 3 mm from the border, and measured to be minimal at 6 mm. This was true for all the measured surfaces, with differences between substances in field intensity level at the border and 3 mm. This difference may suggest some interaction between the pheromone and surface material, but it is not conclusive.
It should be noted that the dependence of the magnetic field on the location of the substance is analogous to the locality characteristic of pheromones. The intensity and detection of pheromones is tied to a specific location in space. Additionally, the inversely proportional relation of magnetic field intensity versus the distance from the center of the pheromone drop is equivalent to the gradient characteristic. The presented data show a clear magnetic gradient detected by the sensor when approaching the substance.
Figure 3b shows different variability values between positions and substances. There was not a distinguishable relation of variability and a specific surface or position. It is suggested that variability was caused by the outdoor nature of the experiment.
Finally, the presented pheromone substance offers the novelty of being able to represent basic pheromone characteristics over a variety of surfaces in outdoor conditions. This is a significant advantage over previous works that used a smart environment that needs screens, projectors or a special surface in a laboratory setting, such as the ones described in [22,23,24,47]. Additionally, the ferrofluid pheromone technology shows clear gradient values, which is an improvement over chemical pheromones. As stated in [49,50], it is difficult to represent gradients with chemical sensors due to its limited bandwidth and turbulent nature of odors.
5.2. Evaporation Validation on Several Surfaces
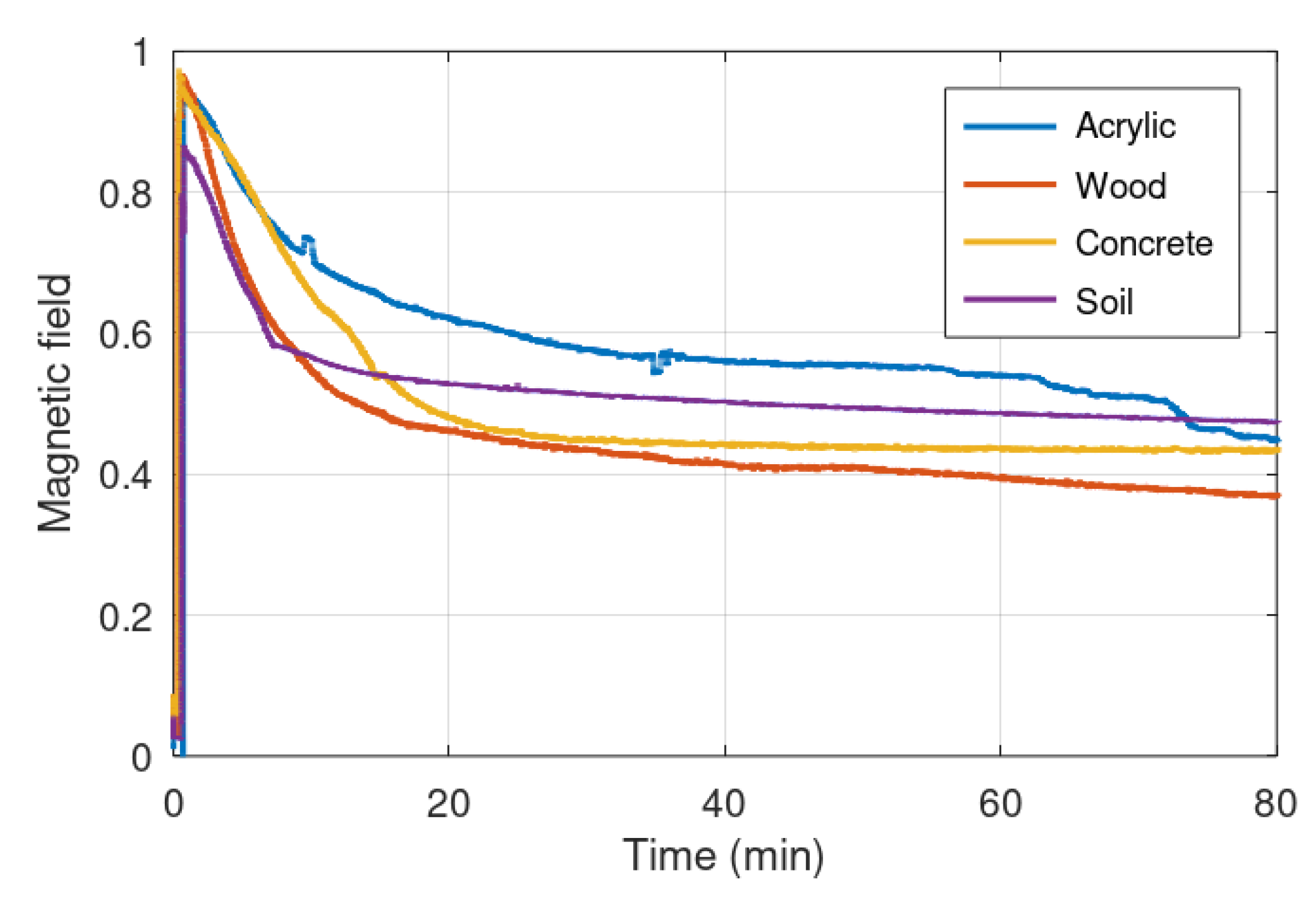
In a second experiment, the pheromone characteristic of evaporation was validated on several surfaces. Substance composition with a slow chemical reaction, specified on previous section, was used. Again, the selected surfaces were laminated acrylic, pine wood, unfinished concrete and dry soil. A single drop of pheromone of about 6 mm in diameter was laid on the surface. In an initial step, the sensor was placed away from the drop and quickly approached the substance. This was done in order to measure the base value of the magnetic field intensity. Then, the magnetometer was located above the center of the drop, and measurements were carried out for 80 min. Measurements on every surface were made with the sensor at 10 mm above surface level.
Figure 4 shows the strength of the magnetic field over time. At the left side, a steep change is noted, when the sensor was located next to the pheromone drop. On all measured surfaces, the magnetic field intensity decreased over time, reaching about 47% of the initial value on soil, 44% on acrylic, 43% on concrete and 37% on wood. The data seem to indicate a possible relation between surfaces and intensity decrease rate or final value, but it is not conclusive. The common behavior observed between substances is the dependence of the magnetic field strength with time, which is analogous to the evaporation characteristic of pheromones. Evaporation values did not reach a zero value (normalized), but a decrease to 47–37% of the initial value is considered useful, for example when using threshold levels for detection.
It is important to highlight, again, that the evaporation characteristic was represented with the ferrofluid pheromone in an outdoor environment. This was done without external equipment, such as special surfaces or screens, as in other representations [22,24,47]. Results from previous experiment and this one, present the novelty of a new tool to perform swarm robotics experiments with pheromones in outdoor conditions.
5.3. Time Response and Recovery Period of Sensor on Several Surfaces
The proposed pheromone substance takes advantage of the use of magnetometer sensors, which presents high sample rates, fast response and recovery times. This is considered an improvement over chemical sensors, which, as presented in previous sections, suffers from response and recovery times of several minutes (see Section 3).
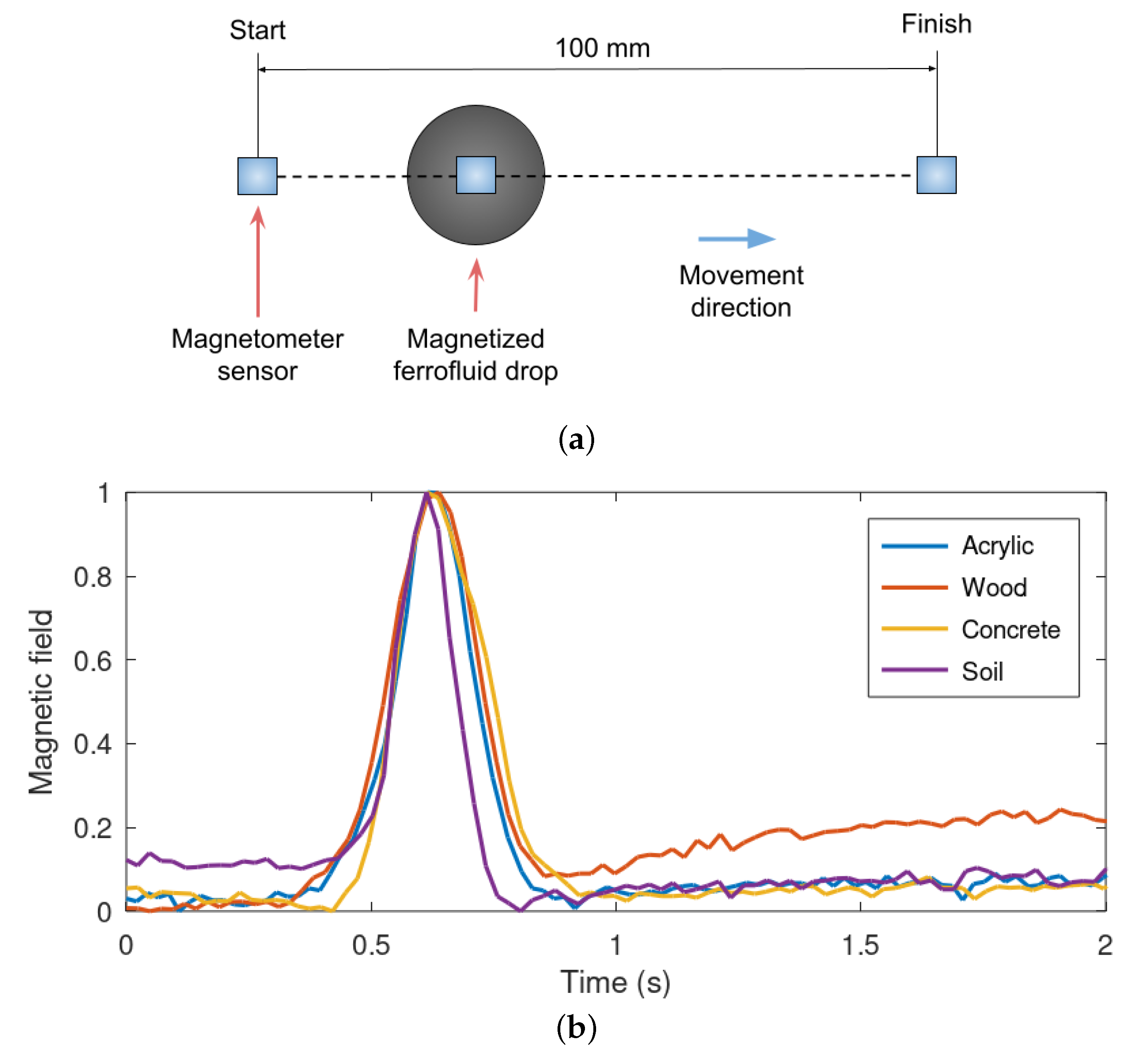
To validate the response of the sensor on the presence of a pheromone, an experiment set up similar to the one performed by Monroy et al. [6] was used. One drop of pheromone (about 6 mm in diameter) was laid on each surface. The sensor was moved at 0.05 m/s speed and at 10 mm above the surface level, passing above the center of the drop. This was repeated on several surfaces: laminated acrylic, pine wood, unfinished concrete and dry soil.
In Figure 5b, the results show an increase in the measured magnetic field intensity when the sensor is passing above the pheromone. Additionally, after its detection, there is a decrease with no residual measurement of the magnetic field. Graphs for all surfaces present a clear gradient of magnetic field when the pheromone is passed. The wood graph presents a baseline larger than other surfaces after passing the pheromone. It is attributed to the wood surface used, which was not even. In addition, that baseline does not reach values greater than 30% of the maximum final value; therefore, a possible threshold level should ignore it.
The presented magnetometer response contrasts with the chemical sensor behavior presented in [6,48,52]. The reported response time of the chemical sensors takes several seconds before a measurement can be made. Additionally, it is reported that the recovery time of the chemical sensors takes even minutes before another measurement can be done. The clear gradient form of the magnetometer sensor passing over the ferrofluid pheromone presents no noticeable delay or response time. As mentioned before, it also does not need recovery time to perform another measurement. This final validation provides evidence of the novelty of using magnetometer sensors for pheromone detection instead of chemical sensors.
6. Conclusions
The technology presented in this paper offers a novel alternative for real pheromone implementations, with the added value of employing it for uncontrolled and outdoor environments. The use of virtual pheromones involves centralized communication, special surfaces, screens and projectors, which limits the application area to laboratories and controlled environments. Chemical pheromones have been used in several research studies on swarm robotics. They aim to mimic pheromones in nature, but chemical sensors suffer from slow response time and large recovery periods. Research in areas such as swarm robotics benefits from the possibility of using real pheromones for outdoor experiments.
In this paper, indirect communication (i.e., stigmergy) principles are achieved by using magnetized ferrofluids and magnetometer sensors. In Section 4, a pheromone solution is presented using magnetite and water. Then, if magnetization decay is desired, a solution of magnetite, water, yeast and sugar is also detailed. Finally, the design of a deposition system is presented, which is needed to magnetize the substance. The detection of pheromone is performed using commercial magnetometer sensors.
The possible use of the ferrofluid substance as a pheromone is validated in Section 5 by identifying the pheromone characteristics of locality, diffusion and evaporation. The proposed pheromone system presents a dependence of the magnetic field strength with the position (locality). The measured strength decreases as the distance from the substance to the sensor is increased (gradient). Additionally, the proposed system presents a dependence of the magnetic intensity on time (evaporation). All validations were performed in outdoor uncontrolled conditions and several types of surfaces. This represents a clear advantage over virtual implementations of pheromones, which are limited by a controlled indoor space.
Finally, the interaction of ferrofluid pheromone and magnetometer sensor is validated on Section 5.3. The results did not show a significant response time nor recovery periods for the sensor on several surfaces under uncontrolled outdoor conditions. Therefore, the use of magnetometer sensor for ferrofluid pheromone detection represents an improvement over chemical sensor use, due to its dynamic response. The possible use of the proposed pheromone for swarm experiments is considered positive since it does not limit the robot speed and total behavior time as a chemical sensor does.
Identified limitations of the present work against similar research may be on the amount of information that can be codified. Chemical sensors still offer the possibility to classify substances. With this pheromone, the capacity to represent and identify several types of pheromones at the same time is not included. However, this feature may be explored by fusing magnetic intensity data with other sensors (such as those chemical sensors), since substance classification requires lower bandwidths than substance quantification.
Future work will focus on implementing the pheromone system in several mobile robots and testing basic collective behaviors. Additionally, further pheromone detection methods (besides thresholds use) will be explored based on data from magnetometers. Finally, future improvements may include further exploration on the mixture of pheromone components, in order to control reaction time and, therefore, evaporation time representation.
Author Contributions
Conceptualization, Investigation and Writing (original draft), J.C.B.-T.; Supervision, Writing (reviewing and editing), F.B. and J.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available on request.
Acknowledgments
We would like to warmly thank Cindy Calderón-Arce. This paper was achieved thanks to her support and advice. Special thanks also to Research and Outreach Vice-Rectory at Costa Rica Institute of Technology (VIE, ITCR), for their support of PROE project (code VIE 1440036).
Conflicts of Interest
The authors declare no conflict of interest
References
- Ben-Ari, M.; Mondada, F. Robots and their applications. In Elements of Robotics; Springer: Cham, Switzerland, 2018; pp. 1–20. [Google Scholar]
- Khaldi, B.; Cherif, F. An overview of swarm robotics: Swarm intelligence applied to multi-robotics. Int. J. Comput. Appl. 2015, 126. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Talamali, M.S.; Bose, T.; Haire, M.; Xu, X.; Marshall, J.A.; Reina, A. Sophisticated collective foraging with minimalist agents: A swarm robotics test. Swarm Intell. 2020, 14, 25–56. [Google Scholar] [CrossRef] [Green Version]
- Fujisawa, R.; Dobata, S.; Sugawara, K.; Matsuno, F. Designing pheromone communication in swarm robotics: Group foraging behavior mediated by chemical substance. Swarm Intell. 2014, 8, 227–246. [Google Scholar] [CrossRef]
- Monroy, J.G.; González-Jiménez, J.; Blanco, J.L. Overcoming the slow recovery of MOX gas sensors through a system modeling approach. Sensors 2012, 12, 13664–13680. [Google Scholar] [CrossRef] [Green Version]
- Joseph, A.; Mathew, S. Ferrofluids: Synthetic strategies, stabilization, physicochemical features, characterization, and applications. ChemPlusChem 2014, 79, 1382–1420. [Google Scholar] [CrossRef]
- Oehlsen, O.; Cervantes-Ramírez, S.I.; Cervantes-Avilés, P.; Medina-Velo, I.A. Approaches on Ferrofluid Synthesis and Applications: Current Status and Future Perspectives. ACS Omega 2022, 7, 3134–3150. [Google Scholar] [CrossRef] [PubMed]
- Etemadi, H.; Buchanan, J.K.; Kandile, N.G.; Plieger, P.G. Iron Oxide Nanoparticles: Physicochemical Characteristics and Historical Developments to Commercialization for Potential Technological Applications. ACS Biomater. Sci. Eng. 2021, 7, 5432–5450. [Google Scholar] [CrossRef] [PubMed]
- Calderón-Arce, C.; Solis-Ortega, R. Swarm Robotics and Rapidly Exploring Random Graph Algorithms Applied to Environment Exploration and Path Planning. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 692–702. [Google Scholar]
- Senanayake, M.; Senthooran, I.; Barca, J.C.; Chung, H.; Kamruzzaman, J.; Murshed, M. Search and tracking algorithms for swarms of robots: A survey. Robot. Auton. Syst. 2016, 75, 422–434. [Google Scholar] [CrossRef]
- Barca, J.C.; Sekercioglu, Y.A. Swarm robotics reviewed. Robotica 2013, 31, 345–359. [Google Scholar] [CrossRef] [Green Version]
- Arvin, F.; Murray, J.; Zhang, C.; Yue, S. Colias: An autonomous micro robot for swarm robotic applications. Int. J. Adv. Robot. Syst. 2014, 11, 113. [Google Scholar] [CrossRef]
- Dorigo, M.; Floreano, D.; Gambardella, L.M.; Mondada, F.; Nolfi, S.; Baaboura, T.; Birattari, M.; Bonani, M.; Brambilla, M.; Brutschy, A.; et al. Swarmanoid: A novel concept for the study of heterogeneous robotic swarms. IEEE Robot. Autom. Mag. 2013, 20, 60–71. [Google Scholar] [CrossRef] [Green Version]
- Reina, A.; Bose, T.; Trianni, V.; Marshall, J.A. Effects of spatiality on value-sensitive decisions made by robot swarms. In Distributed Autonomous Robotic Systems; Springer: Cham, Switzerland, 2018; pp. 461–473. [Google Scholar]
- Heylighen, F. Stigmergy as a universal coordination mechanism I: Definition and components. Cogn. Syst. Res. 2016, 38, 4–13. [Google Scholar] [CrossRef]
- Schroeder, A.; Ramakrishnan, S.; Kumar, M.; Trease, B. Efficient spatial coverage by a robot swarm based on an ant foraging model and the Lévy distribution. Swarm Intell. 2017, 11, 39–69. [Google Scholar] [CrossRef]
- Song, Y.; Fang, X.; Liu, B.; Li, C.; Li, Y.; Yang, S.X. A novel foraging algorithm for swarm robotics based on virtual pheromones and neural network. Appl. Soft Comput. 2020, 90, 106156. [Google Scholar] [CrossRef]
- Arvin, F.; Turgut, A.E.; Krajník, T.; Rahimi, S.; Okay, I.E.; Yue, S.; Watson, S.; Lennox, B. PhiClust: Pheromone-Based Aggregation for Robotic Swarms. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4288–4294. [Google Scholar]
- Tinoco, C.R.; Oliveira, G. PheroCom: Decentralised and asynchronous swarm robotics coordination based on virtual pheromone and vibroacoustic communication. arXiv 2022, arXiv:2202.13456. [Google Scholar]
- Hunt, E.R.; Jones, S.; Hauert, S. Testing the limits of pheromone stigmergy in high-density robot swarms. R. Soc. Open Sci. 2019, 6, 190225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Na, S.; Qiu, Y.; Turgut, A.E.; Ulrich, J.; Krajník, T.; Yue, S.; Lennox, B.; Arvin, F. Bio-inspired artificial pheromone system for swarm robotics applications. Adapt. Behav. 2021, 29, 395–415. [Google Scholar] [CrossRef]
- Arvin, F.; Krajník, T.; Turgut, A.E.; Yue, S. COSΦ: Artificial pheromone system for robotic swarms research. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 407–412. [Google Scholar]
- Liu, T.; Sun, X.; Hu, C.; Fu, Q.; Yue, S. A Versatile Vision-Pheromone-Communication Platform for Swarm Robotics. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7261–7266. [Google Scholar]
- Reina, A.; Cope, A.J.; Nikolaidis, E.; Marshall, J.A.; Sabo, C. ARK: Augmented reality for Kilobots. IEEE Robot. Autom. Lett. 2017, 2, 1755–1761. [Google Scholar] [CrossRef] [Green Version]
- Font Llenas, A.; Talamali, M.S.; Xu, X.; Marshall, J.A.; Reina, A. Quality-sensitive foraging by a robot swarm through virtual pheromone trails. In Proceedings of the International Conference on Swarm Intelligence, Rome, Italy, 29–31 October 2018; pp. 135–149. [Google Scholar]
- Mamei, M.; Zambonelli, F. Physical deployment of digital pheromones through RFID technology. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, 2005. SIS 2005, Pasadena, CA, USA, 8–10 June 2005; pp. 281–288. [Google Scholar]
- Tang, Q.; Xu, Z.; Yu, F.; Zhang, Z.; Zhang, J. Dynamic target searching and tracking with swarm robots based on stigmergy mechanism. Robot. Auton. Syst. 2019, 120, 103251. [Google Scholar] [CrossRef]
- Russell, R.A. Heat trails as short-lived navigational markers for mobile robots. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 4, pp. 3534–3539. [Google Scholar]
- Russell, R.A. Ant trails-an example for robots to follow? In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 2698–2703. [Google Scholar]
- Russell, R.A. Tracking chemical plumes in constrained environments. Robotica 2001, 19, 451. [Google Scholar] [CrossRef]
- Svennebring, J.; Koenig, S. Building terrain-covering ant robots: A feasibility study. Auton. Robot. 2004, 16, 313–332. [Google Scholar] [CrossRef] [Green Version]
- Purnamadjaja, A.H.; Russell, R.A. Pheromone communication in a robot swarm: Necrophoric bee behaviour and its replication. Robotica 2005, 23, 731. [Google Scholar] [CrossRef]
- Purnamadjaja, A.H.; Russell, R.A. Guiding robots’ behaviors using pheromone communication. Auton. Robot. 2007, 23, 113–130. [Google Scholar] [CrossRef]
- Sousa, P.; Marques, L.; de Almeida, A.T. Toward chemical-trail following robots. In Proceedings of the 2008 Seventh International Conference on Machine Learning and Applications, San Diego, CA, USA, 11–13 December 2008; pp. 489–494. [Google Scholar]
- Fujisawa, R.; Dobata, S.; Kubota, D.; Imamura, H.; Matsuno, F. Dependency by concentration of pheromone trail for multiple robots. In Proceedings of the International Conference on Ant Colony Optimization and Swarm Intelligence, Brussels, Belgium, 22–24 September 2008; pp. 283–290. [Google Scholar]
- Purnamadjaja, A.H.; Russell, R.A. Bi-directional pheromone communication between robots. Robotica 2010, 28, 69. [Google Scholar] [CrossRef]
- Marjovi, A.; Nunes, J.; Sousa, P.; Faria, R.; Marques, L. An olfactory-based robot swarm navigation method. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4958–4963. [Google Scholar]
- Mayet, R.; Roberz, J.; Schmickl, T.; Crailsheim, K. Antbots: A feasible visual emulation of pheromone trails for swarm robots. In Proceedings of the International Conference on Swarm Intelligence, Brussels, Belgium, 8–10 September 2010; pp. 84–94. [Google Scholar]
- Marques, L. Good experimental methodologies for mobile robot olfaction. Proc. Robot. Sci. Syst. Conf. (RSS) 2011, 28, 291–294. [Google Scholar]
- Gonzalez-Jimenez, J.; Monroy, J.G.; Blanco, J.L. The multi-chamber electronic nose—An improved olfaction sensor for mobile robotics. Sensors 2011, 11, 6145–6164. [Google Scholar] [CrossRef]
- Fujisawa, R.; Imamura, H.; Matsuno, F. Cooperative transportation by swarm robots using pheromone communication. In Distributed Autonomous Robotic Systems; Springer: Cham, Switzerland, 2013; pp. 559–570. [Google Scholar]
- Monroy, J.G.; Palomo, E.J.; López-Rubio, E.; Gonzalez-Jimenez, J. Continuous chemical classification in uncontrolled environments with sliding windows. Chemom. Intell. Lab. Syst. 2016, 158, 117–129. [Google Scholar] [CrossRef]
- Monroy, J.G.; Gonzalez-Jimenez, J. Gas classification in motion: An experimental analysis. Sens. Actuators B Chem. 2017, 240, 1205–1215. [Google Scholar] [CrossRef]
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. An Electronic Architecture for Multipurpose Artificial Noses. J. Sens. 2018, 2018, 5427693. [Google Scholar] [CrossRef] [Green Version]
- Monroy, J.; Ruiz-Sarmiento, J.R.; Moreno, F.A.; Galindo, C.; Gonzalez-Jimenez, J. Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project. Sensors 2019, 19, 3488. [Google Scholar] [CrossRef] [Green Version]
- Salman, M.; Ramos, D.G.; Hasselmann, K.; Birattari, M. Phormica: Photochromic Pheromone Release and Detection System for Stigmergic Coordination in Robot Swarms. Front. Robot. AI 2020, 7, 195. [Google Scholar] [CrossRef] [PubMed]
- Uno, T.; Sawano, M.; Matsukura, H.; Ishida, H. Detection of Chemical Trail on the Floor by Mobile Robot:: Using Fans to Enhance Chemical Reception at Gas Sensors. In Proceedings of the 2020 IEEE Sensors, Rotterdam, Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar]
- Hernandez Bennetts, V.; Lilienthal, A.J.; Neumann, P.; Trincavelli, M. Mobile robots for localizing gas emission sources on landfill sites: Is bio-inspiration the way to go? Front. Neuroeng. 2012, 4, 20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, X.x.; Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robot. Auton. Syst. 2019, 112, 123–136. [Google Scholar] [CrossRef]
- Bian, P.; McCarthy, T.J. Polymerization of monomer-based ferrofluids. Langmuir 2010, 26, 6145–6148. [Google Scholar] [CrossRef]
- Wei, G.; Thomas, S.; Cole, M.; Rácz, Z.; Gardner, J.W. Ratiometric decoding of pheromones for a biomimetic infochemical communication system. Sensors 2017, 17, 2489. [Google Scholar] [CrossRef] [Green Version]
Figure 1.
Example of two drops of the proposed ferrofluid pheromone substance after deposition.

Figure 2.
Visual description of the pheromone deposition system implemented. (a) Piping diagram describing connections from reservoir vessel, peristaltic pump and magnetization point. (b) Detail of the magnetization stage which used two neodymium magnets between steel plates. Pheromone flows through tube.
Figure 2.
Visual description of the pheromone deposition system implemented. (a) Piping diagram describing connections from reservoir vessel, peristaltic pump and magnetization point. (b) Detail of the magnetization stage which used two neodymium magnets between steel plates. Pheromone flows through tube.

Figure 3.
Locality and gradient validation on several surfaces at outdoor conditions. (a) Experimental set up: magnetic field were measured on center of the drop, approximate border, 3 mm from border and 6 mm from border. The sensor was placed approximately 10 mm above ground. Several measurements were carried out for each position. The reported environment temperature was 20 °C and 90% of humidity. (b) Normalized magnetic field intensity results on z axis of magnetometer for different surfaces.
Figure 3.
Locality and gradient validation on several surfaces at outdoor conditions. (a) Experimental set up: magnetic field were measured on center of the drop, approximate border, 3 mm from border and 6 mm from border. The sensor was placed approximately 10 mm above ground. Several measurements were carried out for each position. The reported environment temperature was 20 °C and 90% of humidity. (b) Normalized magnetic field intensity results on z axis of magnetometer for different surfaces.

Figure 4.
Normalized magnetic field intensity measured on z axis of magnetometer for several surfaces as a function of time. Magnetic field were measured on center of the and 10 mm above surface level. Reported environment temperature was 20 °C and 90% humidity.
Figure 4.
Normalized magnetic field intensity measured on z axis of magnetometer for several surfaces as a function of time. Magnetic field were measured on center of the and 10 mm above surface level. Reported environment temperature was 20 °C and 90% humidity.

Figure 5.
Magnetic field intensity measured on z axis of magnetometer while moving sensor and passing over a drop of pheromone. (a) Experimental set up: Sensor was moved 100 mm at 0.05 m/s speed and at 10 mm above surface level. Magnetic field was measured on the center of the drop. Reported environment temperature was 20 °C and 90% humidity. (b) Normalized magnetic field intensity results on z axis of magnetometer for different surfaces as a function of time.
Figure 5.
Magnetic field intensity measured on z axis of magnetometer while moving sensor and passing over a drop of pheromone. (a) Experimental set up: Sensor was moved 100 mm at 0.05 m/s speed and at 10 mm above surface level. Magnetic field was measured on the center of the drop. Reported environment temperature was 20 °C and 90% humidity. (b) Normalized magnetic field intensity results on z axis of magnetometer for different surfaces as a function of time.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Timeline of publications and research groups related to real implementation of robot stigmergy.
Table 1.
Timeline of publications and research groups related to real implementation of robot stigmergy.
| Year | Monash U., Australia | Coimbra U., Portugal | Hachinohe I.T., Japan | Málaga U., Spain | Others |
|---|---|---|---|---|---|
| 1997 | [29] Heat as pheromone | ||||
| 1999 | [30] Camphor as pheromone | ||||
| 2000 | |||||
| 2001 | [31] Odor localization | ||||
| 2002 | |||||
| 2003 | |||||
| 2004 | [32] Ink as pheromone | ||||
| 2005 | [33] Alcohol vapor as pheromone in a swarm | ||||
| 2006 | |||||
| 2007 | [34] VOC as pheromone in swarm | ||||
| 2008 | [35] Camphor as pheromone | [36] Alcohol as pheromone in swarm | |||
| 2009 | |||||
| 2010 | [37] Alcohol vapor as bi-directional pheromone in a swarm | [38] Odor localization | [39] UV light as pheromone | ||
| 2011 | [40] Odor localization review | [41] E-nose for mobile robots | |||
| 2012 | [6]About MOX chemical sensors | ||||
| 2013 | [42] Alcohol as pheromone in swarm | ||||
| 2014 | [5] Ethanol as pheromone in swarm | ||||
| 2015 | |||||
| 2016 | [43] Odor classification | ||||
| 2017 | [44] Odor classification on a mobile robot | ||||
| 2018 | [45] E-nose for odor classification | ||||
| 2019 | [46] Odor and vision integration on mobile robots | ||||
| 2020 | [47] UV light as pheromone [48] VOC as pheromone |
Table 2.
Details of ingredients and proportions to implement ferrofluid pheromone. Final volume of solution indicated in parentheses.
Table 2.
Details of ingredients and proportions to implement ferrofluid pheromone. Final volume of solution indicated in parentheses.
| Pheromone Type | Material | Quantity |
|---|---|---|
| Without evaporation | 3 g | |
| (4 mL) | Water | 4 mL |
| 3 g | ||
| With evaporation | White sugar | 3 g |
| (15 mL) | Dry yeast | 2 g |
| Water | 6 mL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Brenes-Torres, J.C.; Blanes, F.; Simo, J. Magnetic Trails: A Novel Artificial Pheromone for Swarm Robotics in Outdoor Environments. Computation 2022, 10, 98. https://0-doi-org.brum.beds.ac.uk/10.3390/computation10060098
AMA Style
Brenes-Torres JC, Blanes F, Simo J. Magnetic Trails: A Novel Artificial Pheromone for Swarm Robotics in Outdoor Environments. Computation. 2022; 10(6):98. https://0-doi-org.brum.beds.ac.uk/10.3390/computation10060098
Chicago/Turabian StyleBrenes-Torres, Juan Carlos, Francisco Blanes, and José Simo. 2022. "Magnetic Trails: A Novel Artificial Pheromone for Swarm Robotics in Outdoor Environments" Computation 10, no. 6: 98. https://0-doi-org.brum.beds.ac.uk/10.3390/computation10060098
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.