
Scalable Multiport Converter Structure for Easy Grid Integration of Alternate Energy Sources for Generation of Isolated Voltage Sources for MMC

 ,
,  ,
,
Abstract
:1. Introduction
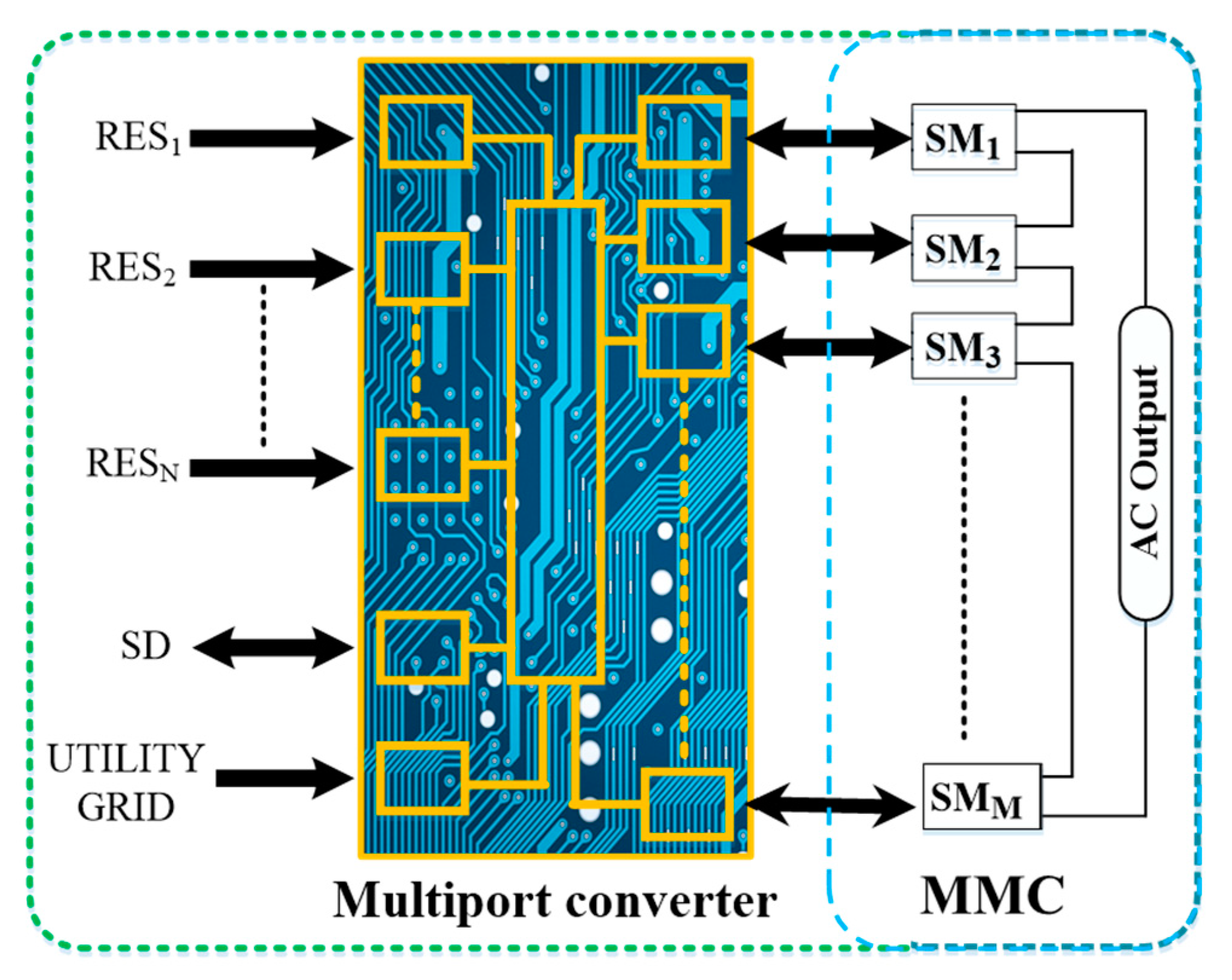
2. Description of Microgrid under Consideration
- (i)
- A triple active half-bridge converter is capable of bidirectional dc–dc conversion. It consists of a high-frequency transformer with a single primary and multiple secondary windings. Half-bridge with doubler capacitors, realizing a triple active half-bridge circuit, is employed on both sides. Symmetrical cascaded semi-active bridges are extendable for multilevel conversion operations.
- (ii)
- Green utility grid circuit consisting of diode-based rectifier followed by boost converter-based power factor correction circuit. This helps to achieve the unity power factor operation along with the minimized harmonic contents.
- (iii)
- Boost converter-based integrated renewable energy sources (PV panel and fuel cell stacks) and battery storages (Battery–1 and Battery–2) supplying power to the load depending upon the availability.
3. Design of Different Components of the System
- A.
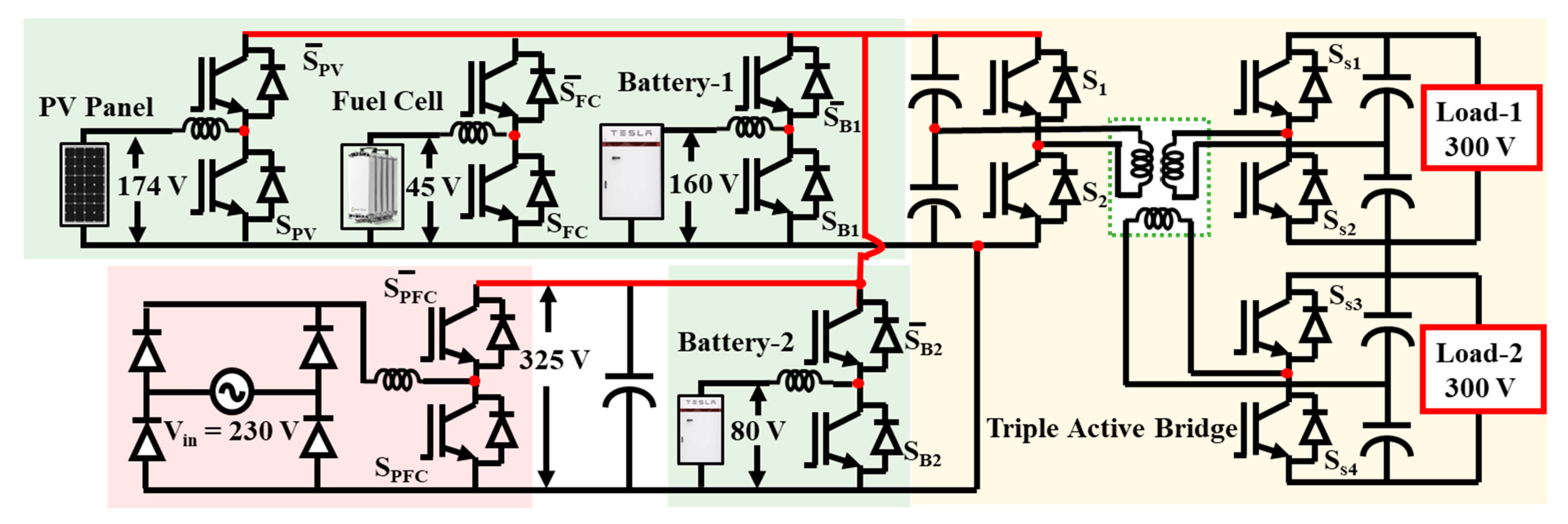
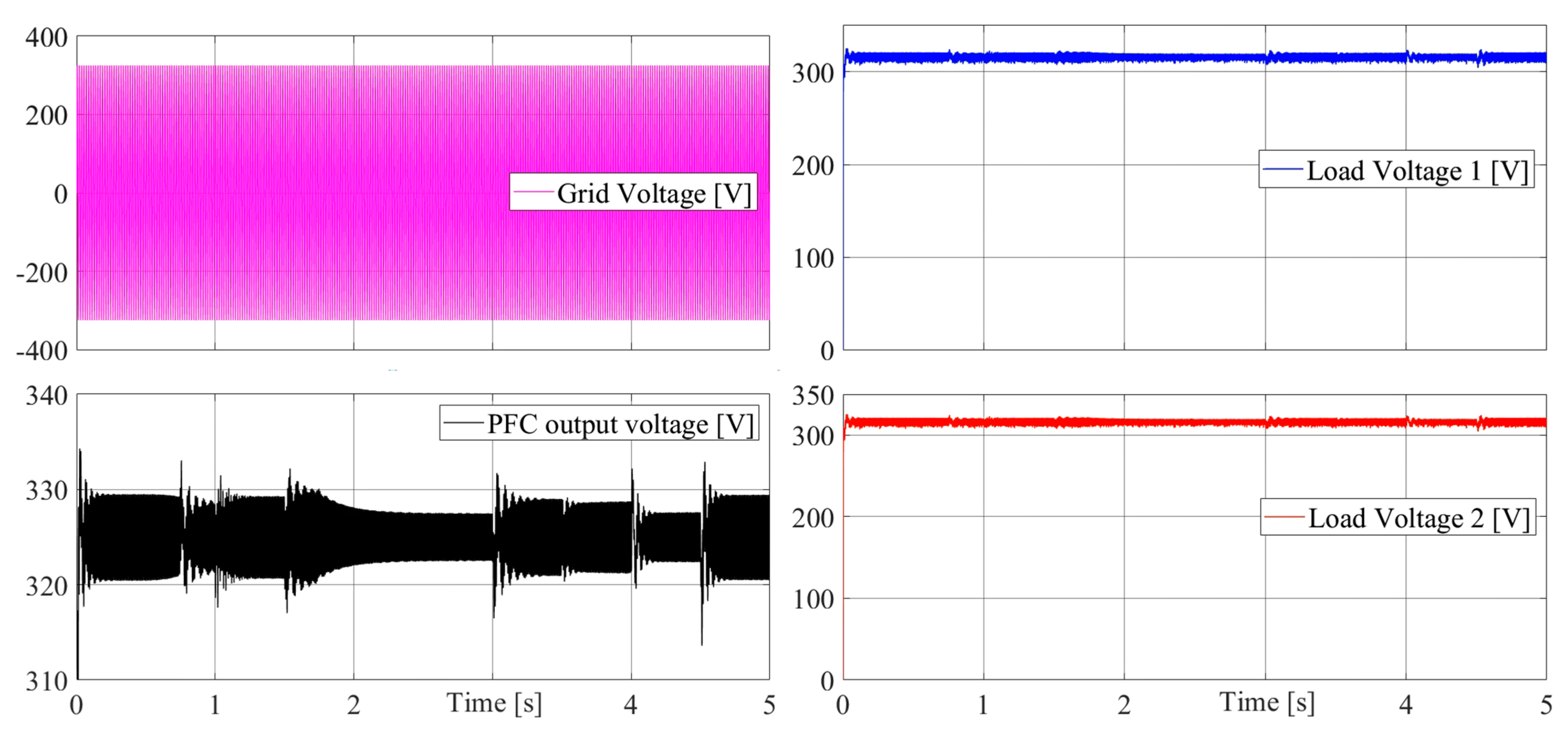
- Diode Rectifier: A grid voltage of 230 V, 60 Hz, is connected at the input of the diode bridge rectifier. A peak grid voltage of 325 V must be obtained at the output, assuming that a big capacitor is placed at the output. This means that the voltage blocking capacity of the diodes must be at least 325 V. Conclusively, the diode of a 600 V rating must be selected (considering safety margin). On the other hand, as boost power factor correction is used at the output of the rectifier, the grid current is sinusoidal under all operating conditions. Thus, the current rating of the diode must be equal to the full load current contributed by the utility grid alone with no other power source operating.
- B.
- Design of Half-Bridge DAB Converter [35]: The design of the half-bridge DAB converter must be designed for one primary winding and two secondary windings. The primary side DAB is powered from the output voltage of the power factor correction circuit with a peak of grid voltage (325 V). This input voltage is inverted to give ac voltage at the input of the DAB converter, and it is then transmitted to the secondary windings to give two isolated secondary windings. The turns ratio of the windings is maintained as: primary: secondary-1 = 1:1 and primary: secondary-2 = 1:1. The transformer is rated for a maximum power rating of 2 kW (i.e., 1 kW for each secondary). For an input voltage of 230 V (rms), the rms current value is calculated to be 8.7 A for a 100% efficiency assumption. For 95% efficiency, the current at the input of the transformer must have an rms value of 9.15 A. The switching frequency of the DAB converter is selected to be 40 kHz.
- C.
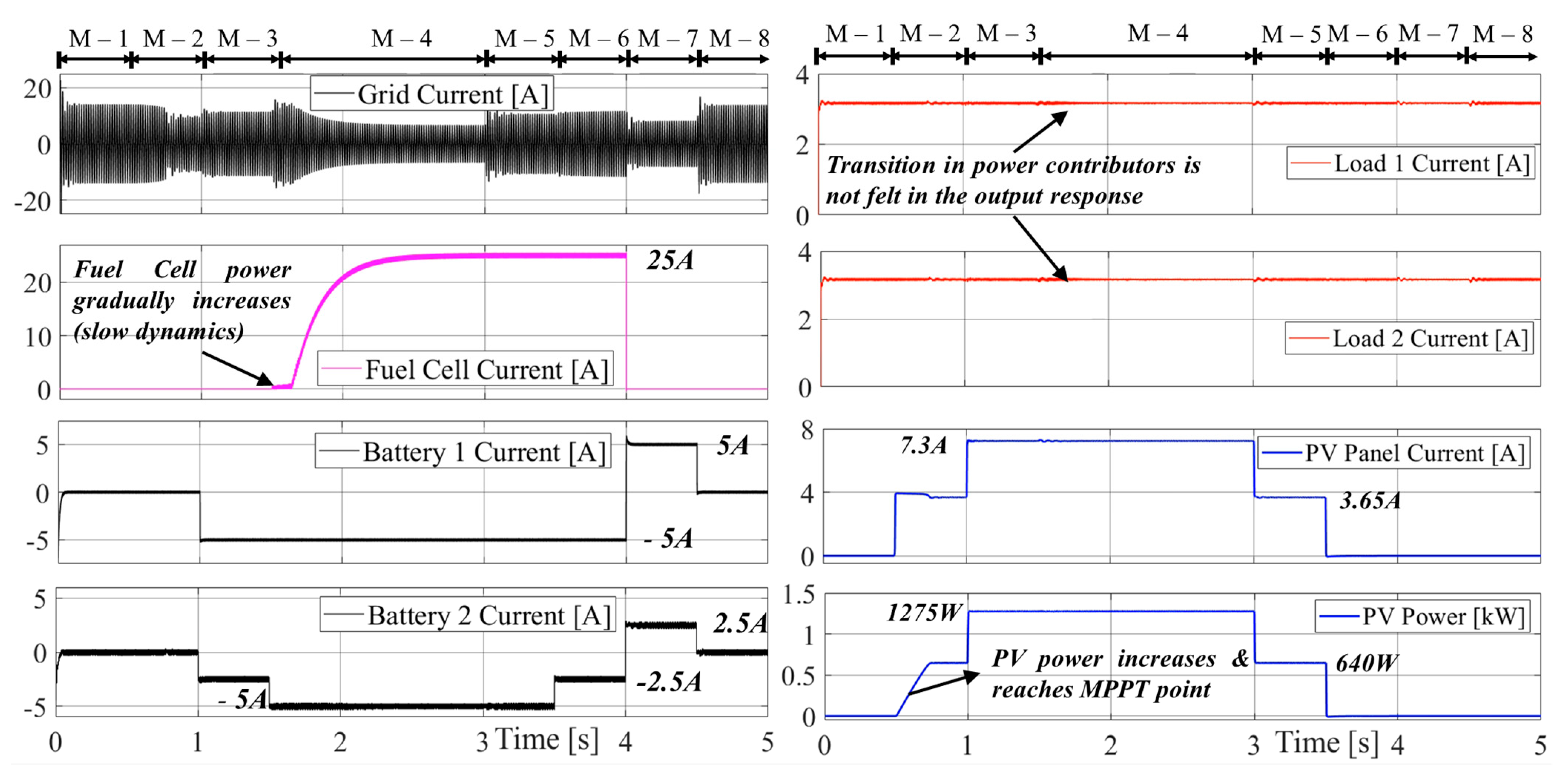
- Design of Boost Converter for Solar PV Panel: Each PV panel used in the simulation model has a maximum power rating of 213 W with its MPPT point being (29 V, 7.35 A). To reach a dc-link voltage of 325 V, six of these PV panels are connected in series to give an input voltage of 174 V at 7.35 A as its MPPT point (1278 W). This means that the MPPT voltage must now be boosted to 325 V using a dc–dc boost converter to ensure controlled and MPPT operation. The voltage rating of the two switches is equal to the dc-link voltage of 325 V, and the current rating can never exceed the maximum panel current rating of 7.84 A. Thus, the two switches are selected to be of 600 V, 10 A rating.
- D.
- Design of Boost Converters for Batteries: The two batteries used in the circuit are rated for 160 V, 10 A and 80 V, 10 A. In the design, the two batteries differ in power rating and the operating duty ratio to achieve the dc-link voltage. To reach dc-link voltage at the output of battery-1 (160 V, 10 A), the duty ratio required is calculated to be 0.51 for the boost converter. For this duty ratio, the inductor and capacitor values are calculated to be 4 mH (10% current ripple) and 38 µF (1% voltage ripple) using (4) and (5), respectively. Thus, the selected inductor and capacitor values are selected to be 5 mH, 15 A, and 100 µF, 600 V.
- E.
- Design of Boost Converter for Fuel Cell: Fuel cells are characterized by a high current and relatively low voltages compared to other renewable sources. Here, the nominal voltage and current values are 35 A and 45 V, respectively. For these values, the duty ratio is required D = 0.816. Here, the inductor required for a 10% current ripple is estimated to be 553 uH using Equation (4). The rating of the inductor is selected to be 1 mH, 50 A. The capacitor value required for a 1% voltage ripple is calculated to be 64 µF using Equation (5). For this, the capacitor value is selected to be 150 µF, 600 V. The boost switch must be rated for 600 V, 50 A, and the series diode must be rated for 600 V, 50 A (fast recovery).
4. Control Algorithm
- (i)
- Unidirectional energy source—utility grid, PV energy source, and fuel cell stacks;
- (ii)
- Unidirectional Loads—resistive load connected at the output of the triple-active half-bridge outputs;
- (iii)
- Bidirectional energy source—batteries that can supply/consume power from the utility grid.
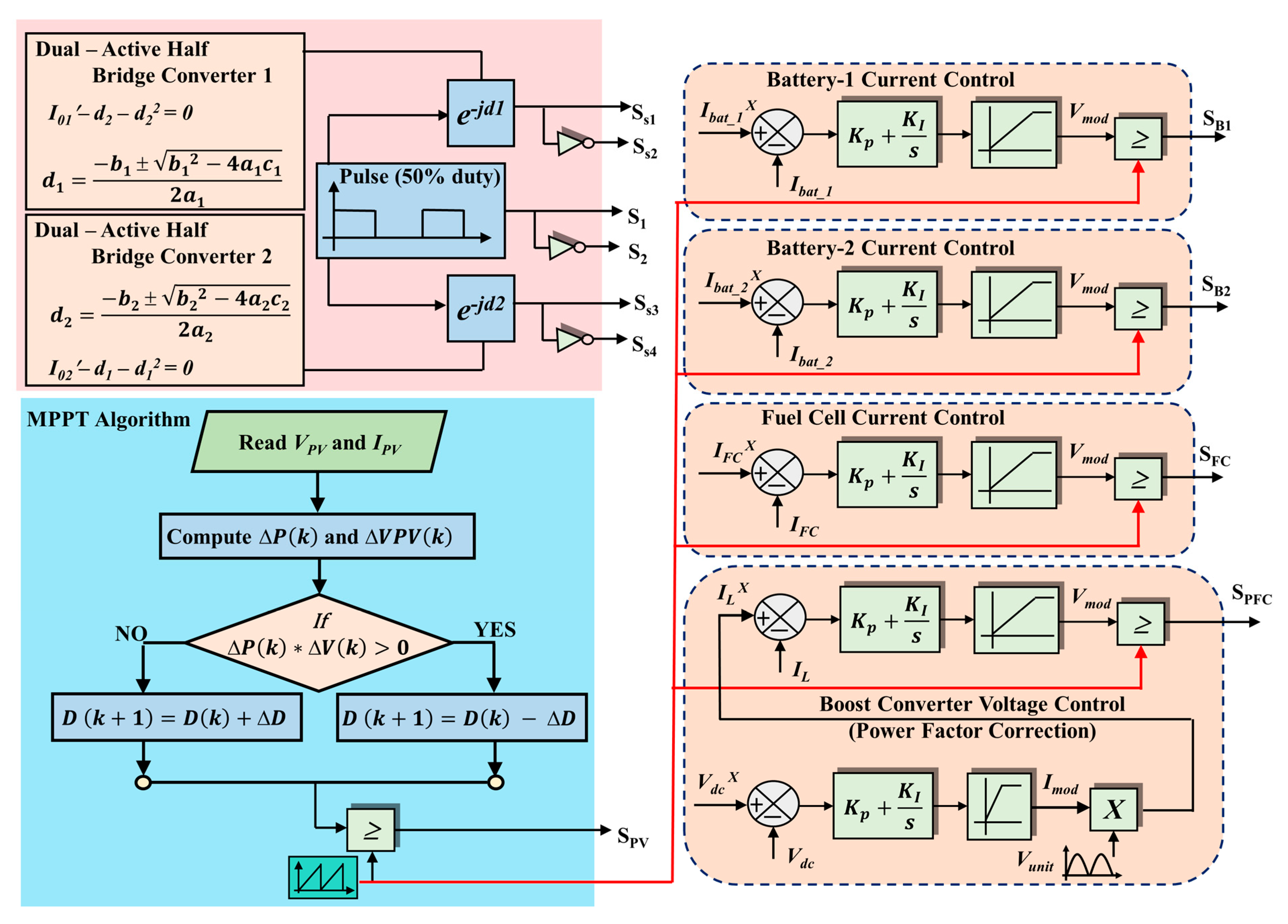
- Control Algorithm for power factor correction circuit of diode bridge rectifier: The boost circuit is implemented here for the power factor correction of the diode bridge rectifier current. Here, either the hysteresis controller or the PI controller (consisting of two PI controllers) can be used for controlling the grid current. Although the hysteresis controller is fast and reliable, it suffers from variable switching frequency, which affects other components that are connected in the system. Because of the complexity of the system, the PI controller-based control algorithm is adopted here, as shown in Figure 3. First, the output voltage is sensed and compared with the reference value to give the inductor current reference. This inductor current must now have the waveshape of a rectified sine wave in synchronism with the input voltage. To create the desired waveshape, the output voltage of the diode bridge rectifier is sensed and unitized by dividing it with the peak value to obtain a unity signal. This signal is then multiplied with the output of the voltage control loop to obtain the current reference. This current reference is then passed through the current control loop to generate the desired duty cycle. This duty cycle is then compared with a 20 kHz sawtooth carrier signal to generate switching pulses for the boost switch. As mentioned above, a fast recovery semiconductor diode must be used in the boost converter for accurate performance.
- MPPT Algorithm for control of PV power injection: The power generated by the PV panels must be maximized by operating the circuit at the MPPT point. To achieve this, the panel voltage and panel current must be sensed. These sensed values are then compared with the previous values to obtain ΔP and ΔV. The slope of ΔP/ΔV must then be determined. However, this may result in an infinite value at the starting of the algorithm. The only important information to be collected here is the determination of ΔP/ΔV. This can also be collected by multiplying ΔP and ΔV. Based on the determination of this parameter, the duty cycle is either incremented or decremented. Summarizing this information, the two equations that dictate the operation at MPPT, as shown in Figure 3, are given by:Case (i): If is positive, then ;Case (ii): If is negative, then .Based on this, for a given temperature and solar irradiation, this algorithm can track the MPPT operating point.
- Current Control of Boost Converter (for Batteries and Fuel Cell): In the conventional boost converter control algorithm, output voltage control is usually implemented as the load voltage or the dc-link voltage and must be stiffly maintained. However, this is not a major requirement in this application. Here, the dc-link voltage is stiffly maintained by the output capacitor of the power factor correction circuit. Thus, in this case, the priority must be to control the current pumped by the boost converter towards the load. In PI controller-based current control, the input current value is sensed from the boost inductor and compared to a reference value to obtain the error signal. This error signal is then passed through the PI controller to generate the boost switch duty cycle. This duty signal is then compared to a sawtooth waveform of 20 kHz, switching frequency to obtain the switching signal. For a boost converter requiring bidirectional power flow, this switching signal must be passed through logical OR operation flow to generate a switching signal for the series switch (for bidirectional current control of battery circuit). For unidirectional current flow (in the case of the fuel cell), a series diode (fast recovery) is used, and only one switching signal for the boost switch is required. However, it should be remembered that the operation of a fuel cell connected boost converter must boost the applied input voltage by approximately eight times to achieve an accurate current control operation. Although the current control structure is the same in both the battery and fuel cell power electronic circuits, each PI controller is tuned differently with different proportional (Kp) and integral gain (KI) values.
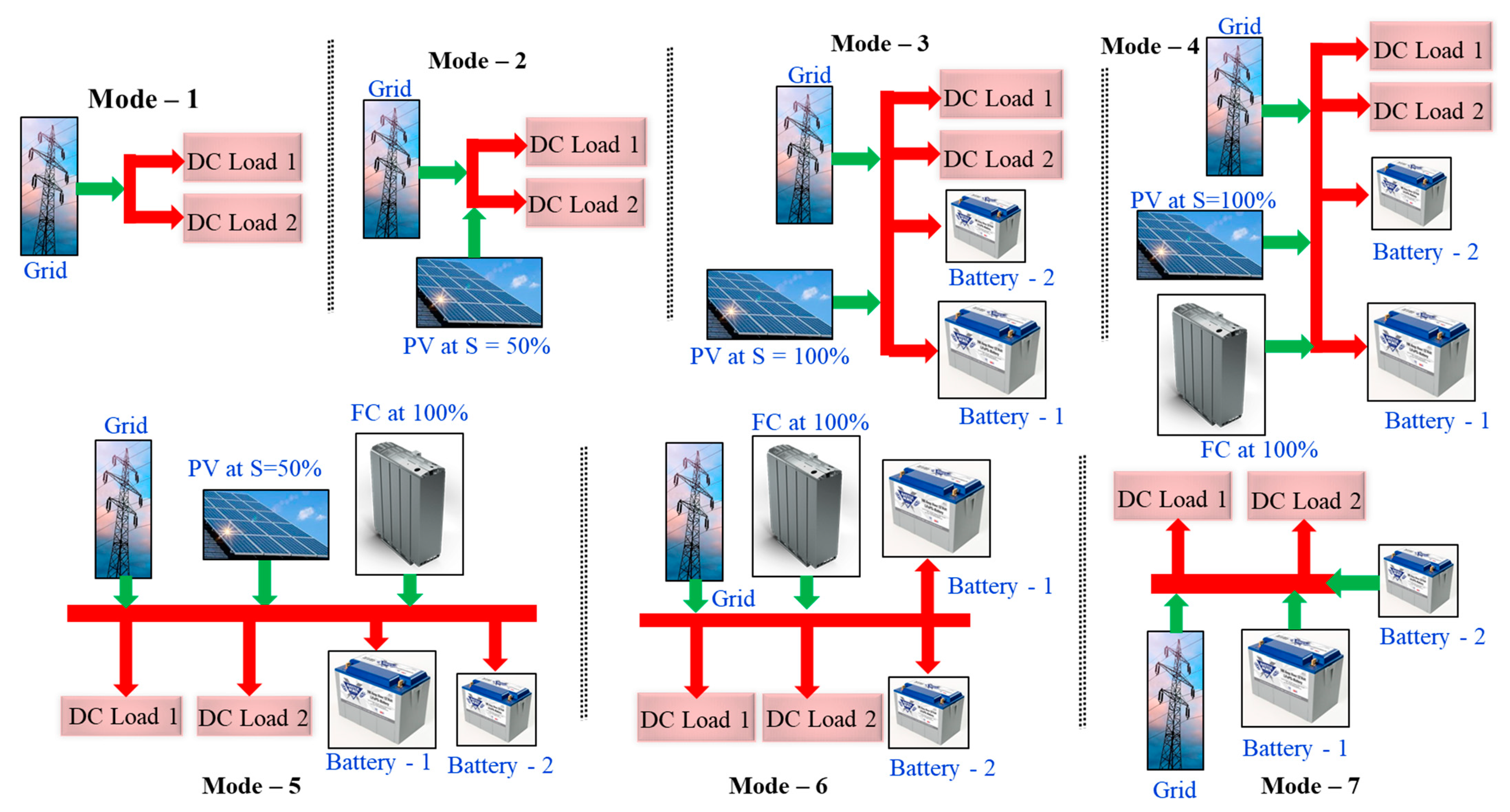
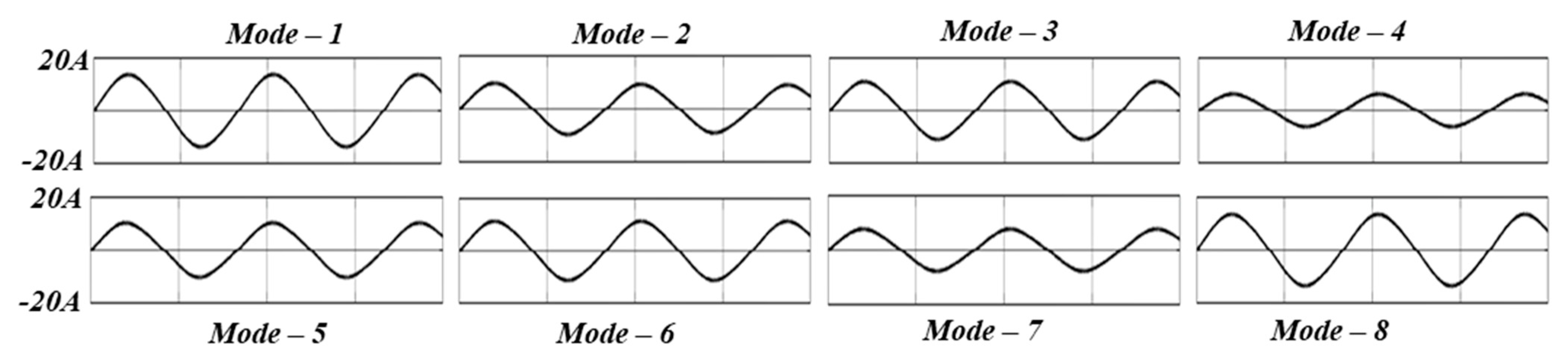
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rodríguez, J.; Bernet, S.; Wu, B.; Pontt, J.O.; Kouro, S. Multilevel voltage-source-converter topologies for industrial medium-voltage drives. IEEE Trans. Ind. Electron. 2007, 54, 2930–2945. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Holtz, J.; Rodriguez, J.; Baoming, G. Medium-voltage multilevel converters—State of the art, challenges, and requirements in industrial applications. IEEE Trans. Ind. Electron. 2010, 57, 2581–2596. [Google Scholar] [CrossRef]
- Rahman, S.; Meraj, M.; Iqbal, A.; Tariq, M.; Maswood, A.I.; Ben-Brahim, L.; Al-ammari, R. Design and Implementation of Cascaded Multilevel qZSI Powered Single-Phase Induction Motor for Isolated Grid Water Pump Application. IEEE Trans. Ind. Appl. 2019, 56, 1907–1917. [Google Scholar] [CrossRef]
- Lai, J.-S.; Peng, F.Z. Multilevel converters—A new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Kazmierkowski, M.P.; Franquelo, L.G.; Rodriguez, J.; Perez, M.A.; Leon, J.I. High-performance motor drives. IEEE Ind. Electron. Mag. 2011, 5, 6–26. [Google Scholar] [CrossRef] [Green Version]
- Akagi, H. Multilevel converters: Fundamental circuits and systems. Proc. IEEE 2017, 105, 2048–2065. [Google Scholar] [CrossRef]
- Rashid, M.H. Power Electronics Handbook; Butterworth-Heinemann: Oxford, UK, 2017; ISBN 0128114088. [Google Scholar]
- Khan, F.H.; Tolbert, L.M. A multilevel modular capacitor-clamped DC–DC converter. IEEE Trans. Ind. Appl. 2007, 43, 1628–1638. [Google Scholar] [CrossRef]
- Priya, M.; Ponnambalam, P.; Muralikumar, K. Modular-multilevel converter topologies and applications—A review. IET Power Electron. 2019, 12, 170–183. [Google Scholar] [CrossRef]
- Rohner, S.; Bernet, S.; Hiller, M.; Sommer, R. Modulation, losses, and semiconductor requirements of modular multilevel converters. IEEE Trans. Ind. Electron. 2009, 57, 2633–2642. [Google Scholar] [CrossRef]
- Kumar, A.; Wang, Y.; Raghuram, M.; Pilli, N.K.; Singh, S.K.; Pan, X.; Xiong, X. A Generalized Switched Inductor Cell Modular Multilevel Inverter. IEEE Trans. Ind. Appl. 2019, 56, 507–518. [Google Scholar] [CrossRef]
- Bina, M.T. A transformerless medium-voltage STATCOM topology based on extended modular multilevel converters. IEEE Trans. Power Electron. 2010, 26, 1534–1545. [Google Scholar]
- Marzoughi, A.; Burgos, R.; Boroyevich, D. Optimum design guidelines for the modular multilevel converter in active front-end applications: Considerations for passive component reduction. IEEE Power Electron. Mag. 2018, 5, 56–65. [Google Scholar] [CrossRef]
- Sharifabadi, K.; Harnefors, L.; Nee, H.-P.; Norrga, S.; Teodorescu, R. Design, Control, and Application of Modular Multilevel Converters for HVDC Transmission Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016; ISBN 1118851560. [Google Scholar]
- Zeng, R.; Zhao, B.; Wei, T.; Xu, C.; Chen, Z.; Liu, J.; Zhou, W.; Song, Q.; Yu, Z. Integrated gate commutated thyristor-based modular multilevel converters: A promising solution for high-voltage dc applications. IEEE Ind. Electron. Mag. 2019, 13, 4–16. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2014, 30, 37–53. [Google Scholar] [CrossRef]
- Raju, M.N.; Sreedevi, J.; Mandi, R.; Meera, K.S. Modular multilevel converters technology: A comprehensive study on its topologies, modelling, control and applications. IET Power Electron. 2019, 12, 149–169. [Google Scholar] [CrossRef]
- Lachichi, A.; Junyent-Ferre, A.; Green, T. Optimal design of a LCL filter for LV modular multilevel converters in hybrid AC/DC microgrids application. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3973–3978. [Google Scholar]
- Lachichi, A.; Junyent-Ferre, A.; Green, T.C. Comparative optimization design of a modular multilevel converter tapping cells and a 2L-VSC for hybrid LV ac/dc microgrids. IEEE Trans. Ind. Appl. 2019, 55, 3228–3240. [Google Scholar] [CrossRef]
- Akagi, H. Classification, terminology, and application of the modular multilevel cascade converter (MMCC). IEEE Trans. Power Electron. 2011, 26, 3119–3130. [Google Scholar] [CrossRef]
- Wu, M.; Li, Y.W.; Konstantinou, G. A Comprehensive Review of Capacitor Voltage Balancing Strategies for Multilevel Converters Under Selective Harmonic Elimination PWM. IEEE Trans. Power Electron. 2020, 36, 2748–2767. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. Modular multilevel converters for transportation electrification: Challenges and opportunities. IEEE Trans. Transp. Electrif. 2018, 4, 399–407. [Google Scholar] [CrossRef]
- Tang, Y.; Ran, L.; Alatise, O.; Mawby, P. Capacitor selection for modular multilevel converter. IEEE Trans. Ind. Appl. 2016, 52, 3279–3293. [Google Scholar] [CrossRef]
- Wang, S.; Liu, T.; Huang, X.; Yu, Y. Capacitor voltage balancing control with reducing the average switching frequency in MMC. J. Eng. 2019, 2019, 2375–2380. [Google Scholar] [CrossRef]
- Zhang, Y.; Adam, G.P.; Lim, T.C.; Finney, S.J.; Williams, B.W. Analysis of modular multilevel converter capacitor voltage balancing based on phase voltage redundant states. IET Power Electron. 2012, 5, 726–738. [Google Scholar] [CrossRef]
- Gao, C.; Liu, X.; Liu, J.; Guo, Y.; Chen, Z. Multilevel converter with capacitor voltage actively balanced using reduced number of voltage sensors for high power applications. IET Power Electron. 2016, 9, 1462–1473. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Zargari, N.R. A novel modulation scheme and voltage balancing algorithm for modular multilevel converter. IEEE Trans. Ind. Appl. 2015, 52, 432–443. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of dual-active-bridge isolated bidirectional DC–DC converter for high-frequency-link power-conversion system. IEEE Trans. Power Electron. 2013, 29, 4091–4106. [Google Scholar] [CrossRef]
- Tao, H.; Kotsopoulos, A.; Duarte, J.L.; Hendrix, M.A.M. Family of multiport bidirectional DC–DC converters. IEE Proc. -Electr. Power Appl. 2006, 153, 451–458. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Zhang, X.; Gao, S.; Ma, M. Improved Model-Based Phase-Shift Control for Fast Dynamic Response of Dual Active Bridge DC/DC Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 223–231. [Google Scholar] [CrossRef]
- Bu, Q.; Wen, H.; Wen, J.; Hu, Y.; Du, Y. Transient DC Bias Elimination of Dual Active Bridge DC-DC Converter with Improved Triple-Phase-Shift Control. IEEE Trans. Ind. Electron. 2019, 67, 8587–8598. [Google Scholar] [CrossRef]
- Naayagi, R.T.; Forsyth, A.J.; Shuttleworth, R. High-power bidirectional DC–DC converter for aerospace applications. IEEE Trans. Power Electron. 2012, 27, 4366–4379. [Google Scholar] [CrossRef]
- Naayagi, R.T.; Forsyth, A.J.; Shuttleworth, R. Bidirectional control of a dual active bridge DC–DC converter for aerospace applications. IET Power Electron. 2012, 5, 1104–1118. [Google Scholar] [CrossRef]
- 95% Efficiency, 1-kW Analog Control AC/DC Reference Design for 5G Telecom Rectifier. Available online: https://www.ti.com/lit/ug/tiduet4a/tiduet4a.pdf?ts=1627097917458&ref_url=https%253A%252F%252Fwww.google.com.hk%252F (accessed on 24 June 2021).
- Texas Instruments. Bi-Directional, Dual Active Bridge Reference Design for Level 3 Electric Vehicle Charging Stations; Texas Instruments: Dallas, TX, USA, 2019; pp. 1–51. [Google Scholar]
- Dung, N.A.; Chiu, H.-J.; Lin, J.-Y.; Hsieh, Y.-C.; Liu, Y.-C. Efficiency optimisation of ZVS isolated bidirectional DAB converters. IET Power Electron. 2018, 11, 1499–1506. [Google Scholar] [CrossRef]
- Hauke, B. Basic Calculation of a Boost Converter’s Power Stage; Application Report; Texas Instruments: Dallas, TX, USA, 2009; pp. 1–9. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification | Parameter | Specification | Parameter | Specification |
|---|---|---|---|---|---|
| Total solar rating | 1275 W | Fuel Cell Specifications | Battery 1 Specifications | ||
| Part Number | 1STH-215-P | Nominal current | 35 A | Battery Rating | 160 V, 10 A |
| MPPT point | 213 W, 29 V, 7.35 A | Nominal voltage | 45 V | Series Inductor | 4 mH, 15 A |
| Open circuit voltage | 36.3 V | Maximum current | 70 A | Filtering capacitor | 100 µF, 600 V |
| Short circuit current | 7.84 A | Maximum voltage | 37 V | Battery 2 Specifications | |
| Configuration | 6 Series panels | Efficeincy of Fuel Cell Stcik (ηstack) | 55% | Battery rating | 80 V, 10 A |
| Series Inductor | 2 mH, 10 A | Series Inductor | 3 mH, 15 A | ||
| Output capacitor | 100 µF, 600 V | Series Inductor | 1 mH, 50 A | Filtering capacitor | 100 µF, 600 V |
| Input capacitor | 2.5 mF, 300 V | Filtering capacitor | 150 µF, 600 V | Initial SOC | 80% |
| Boost switch | 600 V, 10 A | Boost switch rating | 600 V, 50 A | Boost switch rating | 600 V, 15 A |
| Series diode | 600 V, 10 A | Series diode rating | 600 V, 50 A | Series switch rating | 600 V, 15 A |
| Parameter | Specification | Parameter | Specification | Parameter | Specification |
|---|---|---|---|---|---|
| Diode Bridge Rectifier + PFC | DAB Converter Specifications | Transformer Specification | |||
| Diode Rating | 600 V, 20 A (General) | Switches | 600 V, 10 A | Power rating | 2 kW |
| Boost switch | 600 V, 20 A | Capacitors | 20 µF, 600 V | Voltage rating | 230 V (rms) |
| Series diode | 600 V, 20 A (fast recovery) | Load | 100 Ω | Switching frequency | 40 kHz |
| Series inductor | 5 mH, 20 A | Turns’ ratio-1 | 1:1 | Maximum phase shift | 6.25 us |
| Output capacitor | 1.5 mF, 600 V | Turns’ ratio-2 | 1:1 | Leakage inductance | 12 uH, 0.02 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, S.; Khan, I.; Rahman, K.; Al Otaibi, S.; Alkhammash, H.I.; Iqbal, A. Scalable Multiport Converter Structure for Easy Grid Integration of Alternate Energy Sources for Generation of Isolated Voltage Sources for MMC. Electronics 2021, 10, 1779. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10151779
Rahman S, Khan I, Rahman K, Al Otaibi S, Alkhammash HI, Iqbal A. Scalable Multiport Converter Structure for Easy Grid Integration of Alternate Energy Sources for Generation of Isolated Voltage Sources for MMC. Electronics. 2021; 10(15):1779. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10151779
Chicago/Turabian StyleRahman, Syed, Irfan Khan, Khaliqur Rahman, Sattam Al Otaibi, Hend I. Alkhammash, and Atif Iqbal. 2021. "Scalable Multiport Converter Structure for Easy Grid Integration of Alternate Energy Sources for Generation of Isolated Voltage Sources for MMC" Electronics 10, no. 15: 1779. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10151779