Feasibility of Wireless Horse Monitoring Using a Kinetic Energy Harvester Model

 , ,
, ,  , and
, and
Abstract
:1. Introduction
- The authors determine the order of magnitude for the energy that can be harvested at the leg of horses based on a second order mass-spring model of an energy harvester applied on multiple data tracks.
- A comparison between the available energy during different gaits of the horse is made and the effect for tuning the resonance frequency of the energy harvester is shown.
- The influence of different environmental parameters (surface, leg, physics of the horse, etc.) on the energy generation is studied and the results are generalized for use in different scenarios.
- The feasibility to transmit data using 6 different wireless technologies (WiFi, BLE, UWB, LoRa, SigFox and 802.15.4) is evaluated using different duty cycling scenarios.
2. Related Works
2.1. Energy Harvested Wireless Sensor Networks
2.2. Horse Health and Behavior Tracking
3. Kinetic Accelerometer Data: Collection and Interpretation
3.1. Acquisition of the Data
3.2. Analysis of the Data
3.2.1. Motion Frequency
3.2.2. Average Absolute Deviation
4. Energy Harvesters
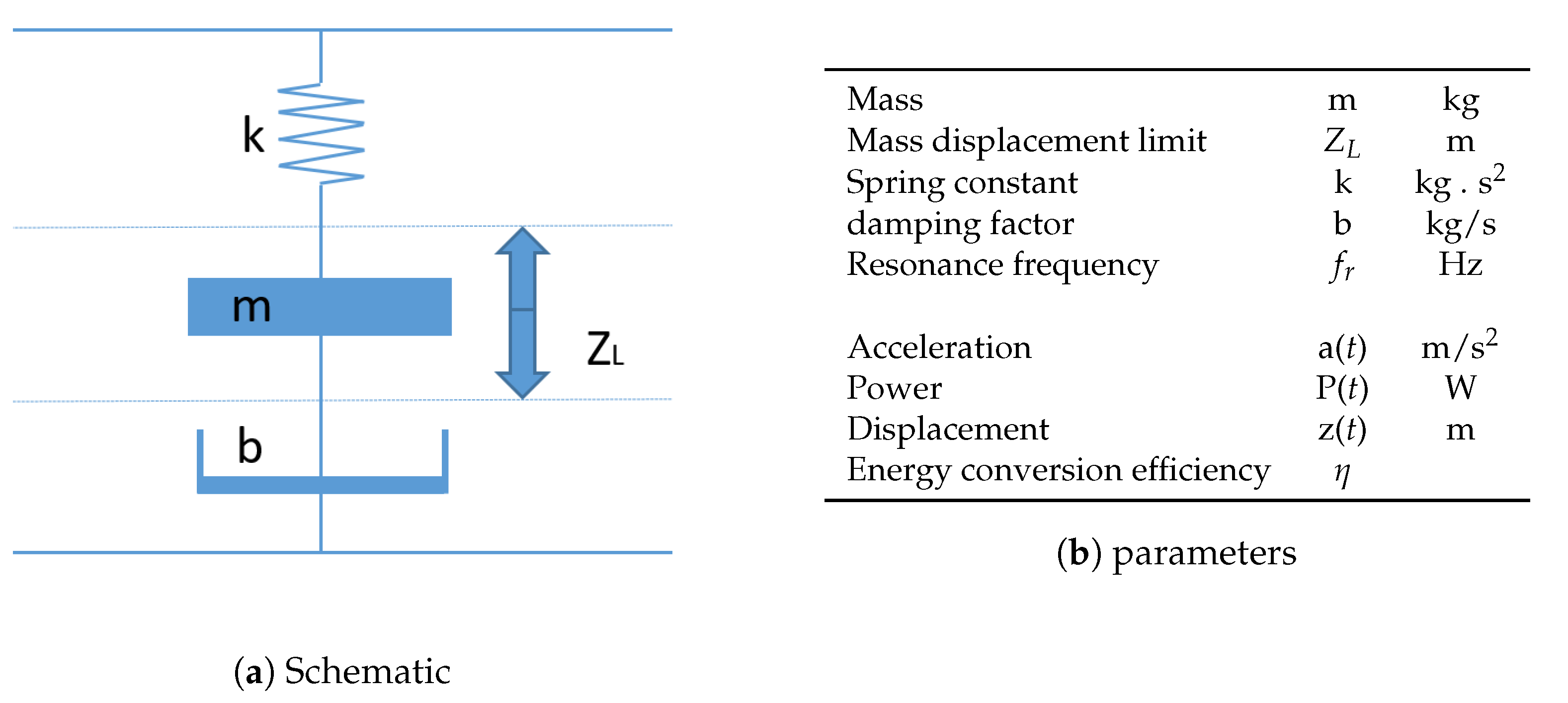
4.1. Model
4.2. Energy
5. Energy Availability
5.1. Average Harvested Power in the Datasets
5.2. Optimization of the Energy Harvester Parameters
5.3. Harvested Energy Per Step
5.4. Differences in Datasets
- Horse: For the collection of the data, 6 different horses were measured. Horse 3 is limping and the average energy that can be harvested during canter is noticeable higher for this horse than for the others (Figure 10). Moreover, a Friesian horse (5) and pony (6) are measured as their physical conditions completely differ from the other 4 horses. Every horse has a different amount of collected data traces (Table 5). For the pony and Friesian horse only 1 accelerometer trace is available. The limping horse (3) is generating a higher average power than the other horse during canter and trot. For walking and standing almost no differences exist between the horses. The pony generates more energy during canter, trot and ‘other’ than the other 4 horses (1, 2, 4, 5).
- Surface: The surface of 31 of the experiments was sand mixed with GEOPAT poly flakes. As the surface has a certain damping factor during moving, we measured an extra measurement on a hard (concrete) surface and one track on the field, both performed by horse 2. While we expected to see a clear variation in harvested power between the different surfaces (and damping factors), we could not find a statistically significant difference between the surfaces.
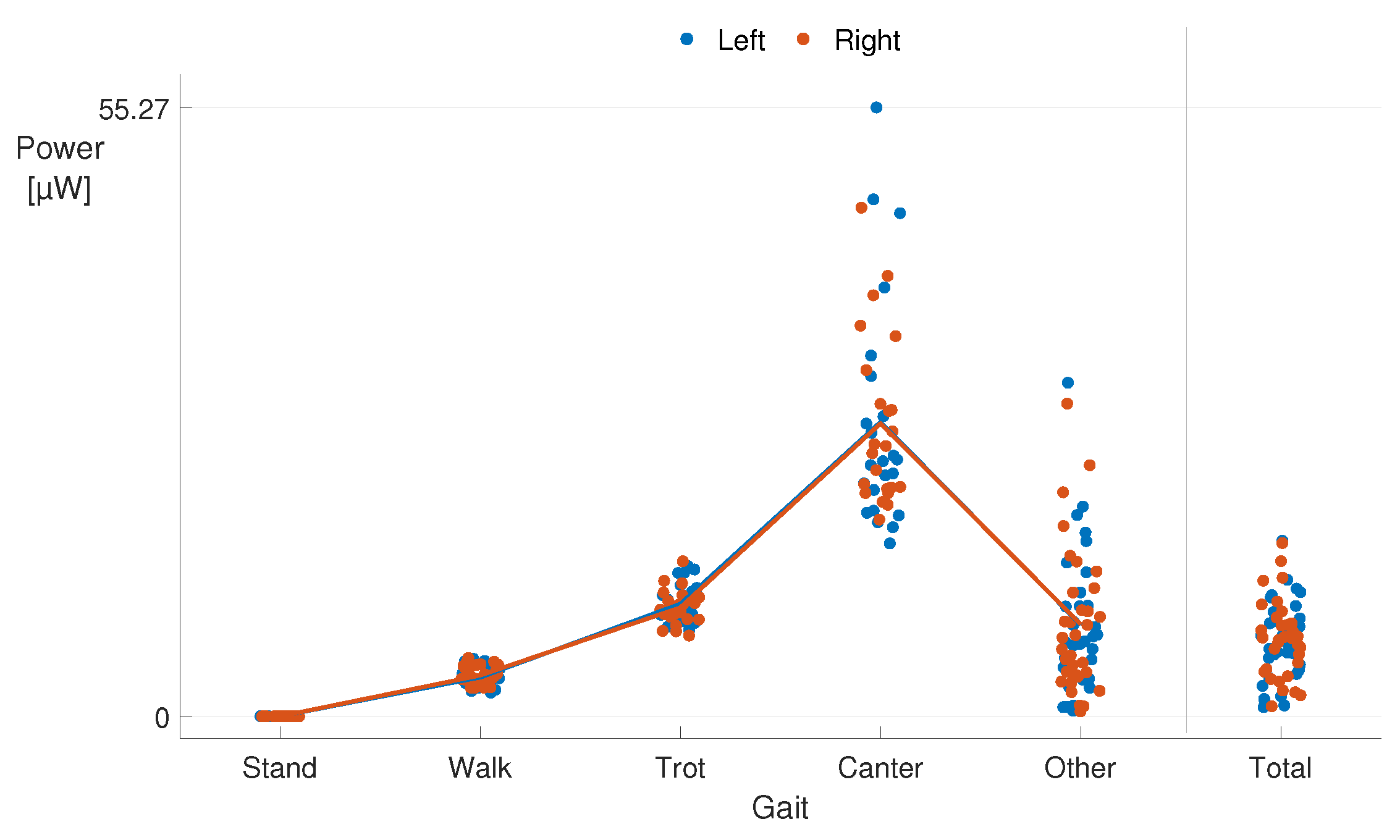
- Leg: Both front legs were used simultaneously for the data collection. The magnitudes of the harvested power are similar for both legs for the symmetrical gaits (Figure 11).
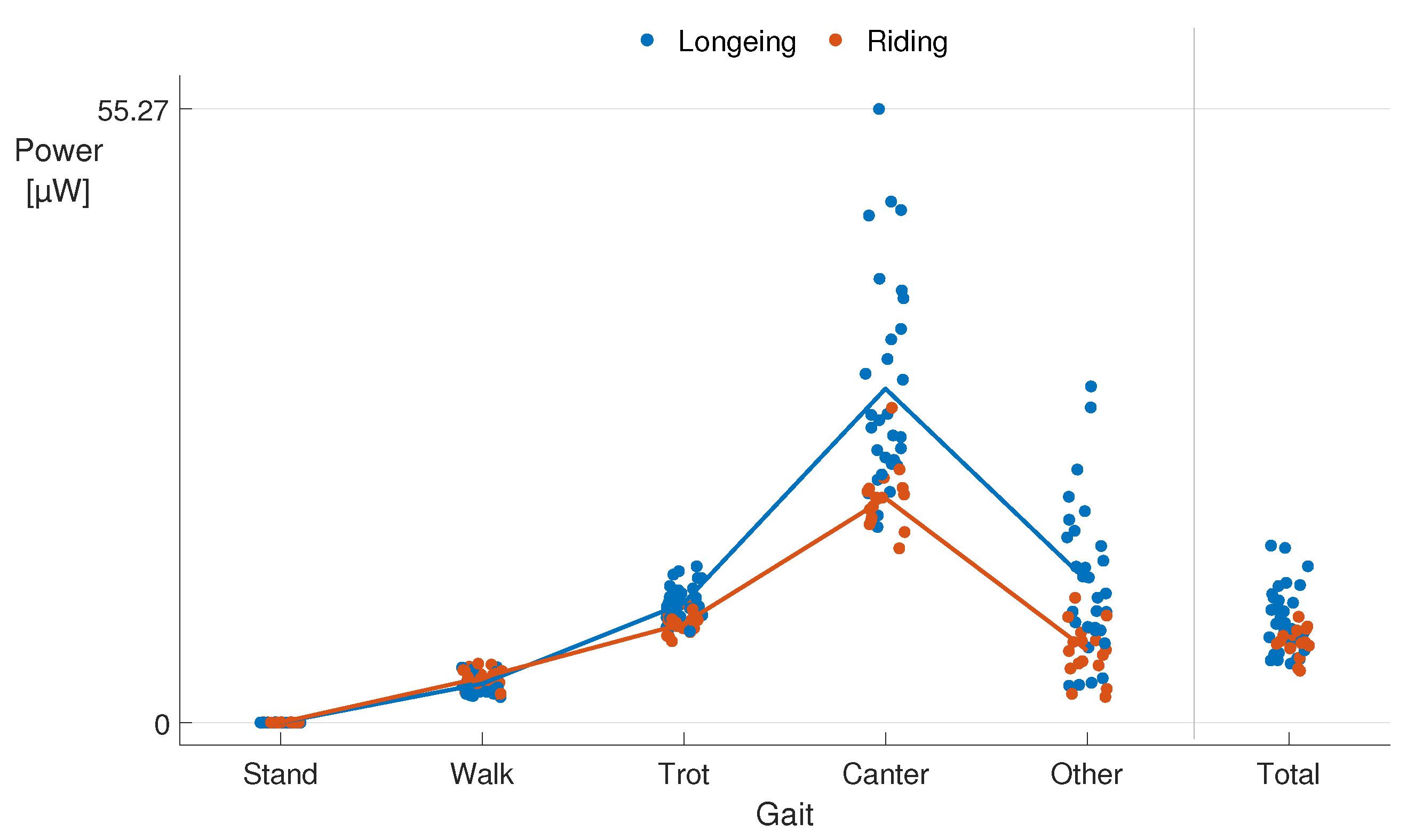
- Longeing/riding: A significant difference in average power between longeing and riding could be noticed during the canter gait (Figure 12). While during riding, the average power is more stable and less deviations occur, since the movements are more controlled by the rider, the harvested energy during riding is therefore also more predictable.
- Other movements: In some of the data tracks movements other than the 4 important natural gaits are also available. The data for these movements is rather limited but we can already conclude some trends on movements with possible high energy harvesting. A selection of special movements includes roll, paw, itching, kicking backwards and cross canter. The average power, before and after optimization, the number of samples and the number of datasets where these movements occur, are given in Table 6. Kicking back has good possibilities for the harvesting of energy. Cross canter has the same order of magnitude as canter.
5.5. Horse-Human Differences
6. Towards Durable Wireless Monitoring
6.1. Feasibility of Sensor Node Based on Kinetic Movement Harvesting
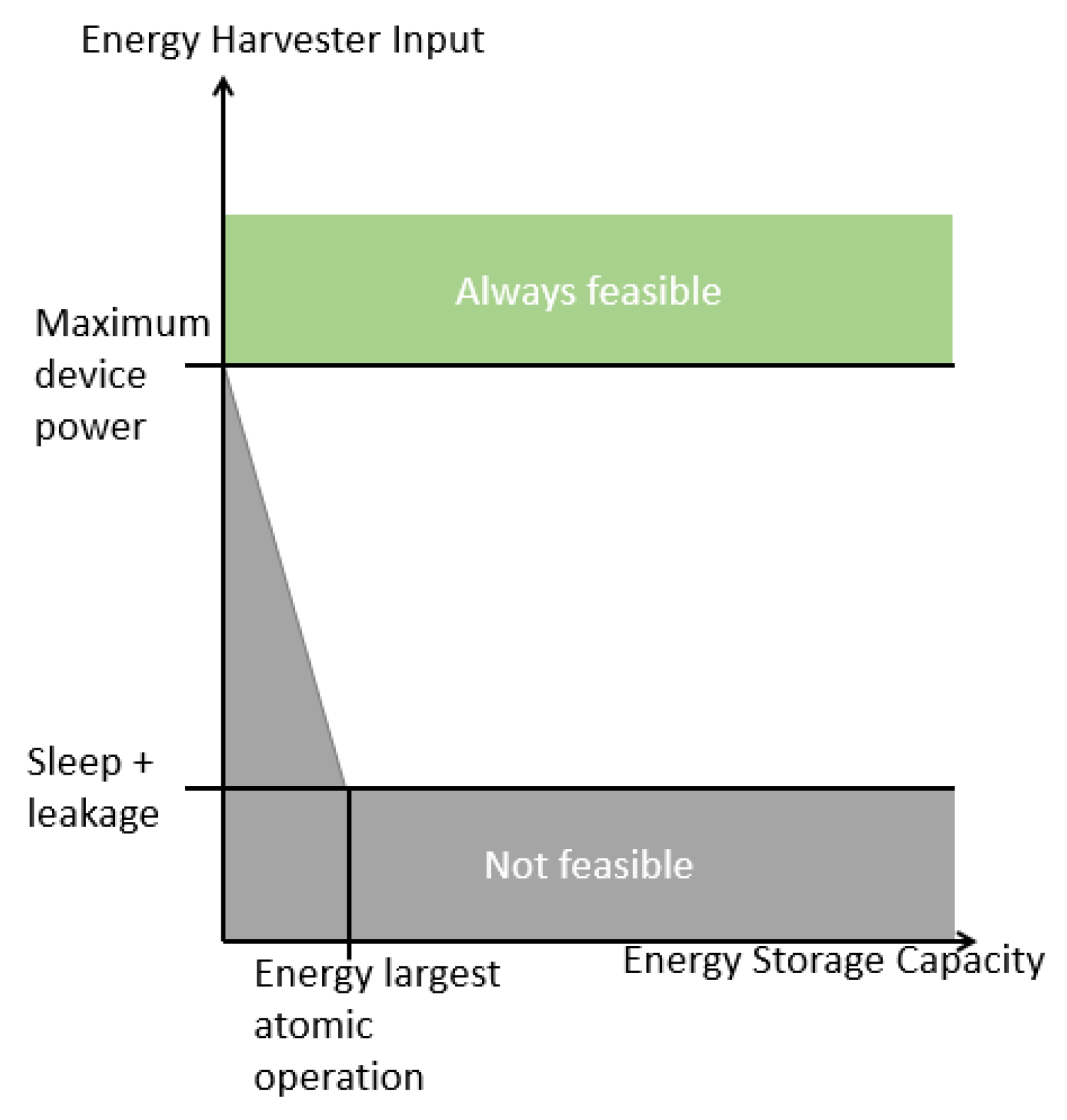
- The system will always be feasible if the harvested power is higher than the maximal power consumption of the device.
- The system is not feasible if the average input power from the energy harvester is lower than the combined power used for the radio and CPU (deep)sleep mode and the leakage current of the battery. From the results found in the previous sections, the average (deep)sleep power (and leakage of the battery) of the device during standby should be below 0.03 W.
- For systems where the harvested power level falls between these extremes, the designer has to implement (adaptive) energy saving procedures whereby the system is turned on periodically. To this end, the system will periodically turn on the radio, CPU and/or accelerometer. The percentage of time the device is in active mode is also referred to as the duty cycle. A batteryless wireless node can for example make use of the higher energy availability during canter by increasing the duty cycle. In contrast, during standing less energy will be available, and as such lower duty cycles can be used. The relative percentage of different activities of a horse depends strongly on the type of residency (stable versus field), as well as the training schedule. As such, in realistic systems activity recognition can be used for dynamically changing the duty cycle of the sensor node.
6.2. Feasible Duty Cycle for Wireless Transmissions
- The MCU and accelerometer are continuously in active mode. The radio chip is not put in sleep mode and regularly sends a packet. (Figure 14a).
- The MCU and accelerometer are continuously in active mode but the radio chip is put in sleep mode and wakes up for transmitting a packet according to a duty cycle. (Figure 14b).
- The accelerometer is continuously logging and buffering data, but the radio and MCU follows a duty cycle. The MCU will process the data after which the data will be transmitted immediately. (Figure 14c)
- The MCU and accelerometer are only awake following a duty cycle. After collecting, processing and sending the data, the MCU and accelerometer will go to sleep for some time (Figure 14d).
- The leakage current of the battery and other irregularities in the hardware circuits are not taken into account.
- The time for switching between state is assumed negligible together with the accompanying different current consumption.
- The MCU will always be turned on during the transmission of packets and an extra fixed interval for processing and/or compressing.
6.3. Decreasing Data Communication Power
- This scenario will collect accelerometer data at 25 Hz from the device and transmit this output to a central node.
- This scenario reduces the amount of transmitted data by local processing of the RAW accelerometer data, sampled at 25 Hz. For example, if we classify the horse’s gait based on the accelerometer output, we only have to transmit the classification to the horse owner.
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eerdekens, A.; Deruyck, M.; Fontaine, J.; Martens, L.; Poorter, E.D.; Joseph, W. Automatic equine activity detection by convolutional neural networks using accelerometer data. Comput. Electron. Agric. 2020, 168, 105139. [Google Scholar] [CrossRef]
- Bosch, S.; Serra Bragança, F.; Marin-Perianu, M.; Marin-Perianu, R.; Van der Zwaag, B.J.; Voskamp, J.; Back, W.; Van Weeren, R.; Havinga, P. EquiMoves: A Wireless Networked Inertial Measurement System for Objective Examination of Horse Gait. Sensors 2018, 18, 850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Weeren, P.R.; Pfau, T.; Rhodin, M.; Roepstorff, L.; Serra Bragança, F.; Weishaupt, M.A. Do we have to redefine lameness in the era of quantitative gait analysis? Equine Vet. J. 2017, 49, 567–569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Traub-Dargatz, J.L.; Kopral, C.A.; Seitzinger, A.H.; Garber, L.P.; Forde, K.; White, N.A. Estimate of the national incidence of and operation-level risk factors for colic among horses in the United States, spring 1998 to spring 1999. J. Am. Vet. Med. Assoc. 2001, 219, 67–71. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Curtis, L.; Trewin, I.; England, G.; Burford, J.; Freeman, S. Veterinary practitioners’ selection of diagnostic tests for the primary evaluation of colic in the horse. Vet. Rec. Open 2015, 2, e000145. [Google Scholar] [CrossRef] [Green Version]
- Walters, J.M.; Parkin, T.D.; Snart, H.; Murray, R.C. Current Management and Training Practices for UK Dressage Horses. Comp. Exerc. Physiol. 2008, 5, 73–83. [Google Scholar] [CrossRef] [Green Version]
- Harris, P.A. Developments in Equine Nutrition: Comparing the Beginning and End of This Century. J. Nutr. 1998, 128, 2698S–2703S. [Google Scholar] [CrossRef] [Green Version]
- Saha, P.; Goswami, S.; Chakrabarty, S.; Sarkar, S. Simulation and model verification of shoe embedded piezoelectric energy harvester. In Proceedings of the 2014 6th IEEE Power India International Conference (PIICON), Delhi, India, 5–7 December 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Kymissis, J.; Kendall, C.; Paradiso, J.; Gershenfeld, N. Parasitic power harvesting in shoes. In Proceedings of the Digest of Papers, Second International Symposium on Wearable Computers (Cat. No.98EX215), Pittsburgh, PA, USA, 19–20 October 1998; pp. 132–139. [Google Scholar] [CrossRef]
- Gatto, A.; Frontoni, E. Energy Harvesting system for smart shoes. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Luo, J.; Cao, Z.; Yuan, M.; Liang, Y.; Xu, X.; Li, M. Fabrication and characterization of miniature nonlinear piezoelectric harvester applied for low frequency and weak vibration. Results Phys. 2018, 11, 237–242. [Google Scholar] [CrossRef]
- Mann, B.; Sims, N. Energy harvesting from the nonlinear oscillations of magnetic levitation. J. Sound Vib. 2009, 319, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Ullo, S.; Gallo, M.; Palmieri, G.; Amenta, P.; Russo, M.; Romano, G.; Ferrucci, M.; Ferrara, A.; De Angelis, M. Application of wireless sensor networks to environmental monitoring for sustainable mobility. In Proceedings of the 2018 IEEE International Conference on Environmental Engineering (EE), Milan, Italy, 12–14 March 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Dominguez-Morales, J.P.; Rios-Navarro, A.; Dominguez-Morales, M.; Tapiador-Morales, R.; Gutierrez-Galan, D.; Cascado-Caballero, D.; Jimenez-Fernandez, A.; Linares-Barranco, A. Wireless Sensor Network for Wildlife Tracking and Behavior Classification of Animals in Doñana. IEEE Commun. Lett. 2016, 20, 2534–2537. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, X.; Chen, C.; Liu, Z.; Cao, S. A Wildlife Monitoring System Based on Wireless Image Sensor Networks. Sens. Transducers J. 2014, 180, 104–109. [Google Scholar]
- Omairi, A.; Ismail, Z.H.; Danapalasingam, K.A.; Ibrahim, M. Power Harvesting in Wireless Sensor Networks and Its Adaptation With Maximum Power Point Tracking: Current Technology and Future Directions. IEEE Int. Things J. 2017, 4, 2104–2115. [Google Scholar] [CrossRef]
- Bhuvaneswari, P.T.V.; Balakumar, R.; Vaidehi, V.; Balamuralidhar, P. Solar Energy Harvesting for Wireless Sensor Networks. In Proceedings of the 2009 First International Conference on Computational Intelligence, Communication Systems and Networks, Indore, India, 23–25 July 2009; pp. 57–61. [Google Scholar] [CrossRef]
- Panatik, K.Z.; Kamardin, K.; Shariff, S.A.; Yuhaniz, S.S.; Ahmad, N.A.; Yusop, O.M.; Ismail, S. Energy harvesting in wireless sensor networks: A survey. In Proceedings of the 2016 IEEE 3rd International Symposium on Telecommunication Technologies (ISTT), Kuala Lumpur, Malaysia, 28–30 November 2016; pp. 53–58. [Google Scholar] [CrossRef]
- Voigt, T.; Ritter, H.; Schiller, J. Utilizing solar power in wireless sensor networks. In Proceedings of the 28th Annual IEEE International Conference on Local Computer Networks, LCN ’03, Bonn/Konigswinter, Germany, 20–24 October 2003; pp. 416–422. [Google Scholar] [CrossRef]
- Kishore, R.A.; Priya, S. A Review on Low-Grade Thermal Energy Harvesting: Materials, Methods and Devices. Materials 2018, 11, 1433. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xin, L.; Yang, S.-H. Thermal energy harvesting for WSNs. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 3045–3052. [Google Scholar] [CrossRef]
- Kumari, P.; Sahay, J. Investigation on RF energy harvesting. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless Networks With RF Energy Harvesting: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2015, 17, 757–789. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; He, Q.; Wang, J.; Zhou, Z.; Li, X. Wearable energy harvesters generating electricity from low-frequency human limb movement. Microsyst. Nanoeng. 2018, 4, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; You, Z. A Shoe-Embedded Piezoelectric Energy Harvester for Wearable Sensors. Sensors 2014, 14, 12497–12510. [Google Scholar] [CrossRef] [PubMed]
- Sravanthi, C.; Conrad, J.M. A survey of energy harvesting sources for embedded systems. In Proceedings of the IEEE SoutheastCon 2008, Huntsville, AL, USA, 3–6 April 2008; pp. 442–447. [Google Scholar] [CrossRef]
- Aminov, P.; Agrawal, J.P. RF Energy Harvesting. In Proceedings of the 2014 IEEE 64th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 27–30 May 2014; pp. 1838–1841. [Google Scholar] [CrossRef]
- Radoi, I.E.; Mann, J.; Arvind, D.K. Tracking and monitoring horses in the wild using wireless sensor networks. In Proceedings of the 2015 IEEE 11th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Abu Dhabi, UAE, 19–21 October 2015; pp. 732–739. [Google Scholar] [CrossRef] [Green Version]
- Robilliard, J.J.; Pfau, T.; Wilson, A.M. Gait characterisation and classification in horses. J. Exp. Biol. 2007, 210, 187–197. [Google Scholar] [CrossRef] [Green Version]
- Lopes, M.; Dearo, A.; Lee, A.; Reed, S.K.; Kramer, J.; Pai, P.; Yonezawa, Y.; Maki, H.; Morgan, T.L.; Wilson, D.A.; et al. An attempt to detect lameness in galloping horses by use of body-mounted inertial sensors. Am. J. Vet. Res. 2016, 77, 1121–1131. [Google Scholar] [CrossRef]
- Khelifi, A.; Hamli, R.A.; Tamimi, S.A.; Ali, R.A. An Automated System for Monitoring Horses Vital Signs Using Heart Beat Sensors. In Proceedings of the 2017 Palestinian International Conference on Information and Communication Technology (PICICT), Gaza City, Palestina, 8–9 May 2017; pp. 53–59. [Google Scholar] [CrossRef]
- Equicty. Equicty Stable Managment Software. Available online: https://www.equicty.com/ (accessed on 17 May 2019).
- Trackener: 24/7 Horse Monitoring Device and App. Available online: https://www.trackener.com/product (accessed on 12 May 2019).
- Axivity. AX3 Data Sheet Version 1.3. 2015. Available online: https://axivity.com/files/resources/AX3DataSheet.pdf (accessed on 12 May 2019).
- Beeby, S.P.; Tudor, M.J.; White, N.M. Energy harvesting vibration sources for microsystems applications. Meas. Sci. Technol. 2006, 17, R175–R195. [Google Scholar] [CrossRef]
- Cook-Chennault, K.A.; Thambi, N.; Sastry, A.M. Powering MEMS portable devices—A review of non-regenerative and regenerative power supply systems with special emphasis on piezoelectric energy harvesting systems. Smart Mater. Struct. 2008, 17, 043001. [Google Scholar] [CrossRef] [Green Version]
- Sari, I.; Balkan, T.; Kulah, H. An electromagnetic micro power generator for wideband environmental vibrations. Sens. Actuators Phys. 2008, 145–146, 405–413. [Google Scholar] [CrossRef]
- Gorlatova, M.; Sarik, J.; Grebla, G.; Cong, M.; Kymissis, I.; Zussman, G. Movers and Shakers: Kinetic Energy Harvesting for the Internet of Things. IEEE J. Sel. Areas Commun. 2015, 33, 1624–1639. [Google Scholar] [CrossRef] [Green Version]
- Yun, J.; Patel, S.; Reynolds, M.; Abowd, G. A Quantitative Investigation of Inertial Power Harvesting for Human-Powered Devices. In Proceedings of the 10th International Conference on Ubiquitous Computing (UbiComp ’08), Seoul, Korea, 21–24 September 2008; pp. 74–83. [Google Scholar] [CrossRef] [Green Version]
- Von Buren, T.; Mitcheson, P.D.; Green, T.C.; Yeatman, E.M.; Holmes, A.S.; Troster, G. Optimization of inertial micropower Generators for human walking motion. IEEE Sens. J. 2006, 6, 28–38. [Google Scholar] [CrossRef]
- Yun, J.; Patel, S.N.; Reynolds, M.S.; Abowd, G.D. Design and Performance of an Optimal Inertial Power Harvester for Human-Powered Devices. IEEE Trans. Mob. Comput. 2011, 10, 669–683. [Google Scholar] [CrossRef]
- Ju, Q.; Li, H.; Zhang, Y. Power Management for Kinetic Energy Harvesting IoT. IEEE Sens. J. 2018, 18, 4336–4345. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Green, T.C.; Yeatman, E.M.; Holmes, A.S. Architectures for vibration-driven micropower generators. J. Microelectromech. Syst. 2004, 13, 429–440. [Google Scholar] [CrossRef] [Green Version]
- Ashraf, K.; Khir, M.H.M.; Dennis, J.O.; Baharudin, Z. Frequency dependence of quality factor in vibration energy harvesting. In Proceedings of the RSM 2013 IEEE Regional Symposium on Micro and Nanoelectronics, Langkawi, Malaysia, 25–27 September 2013; pp. 151–154. [Google Scholar]
- Rantz, R.; Roundy, S. Characterization of Real-world Vibration Sources and Application to Nonlinear Vibration Energy Harvesters. Energy Harvest. Syst. 2017, 4, 67–76. [Google Scholar] [CrossRef]
- Toshiyoshi, H.; Ju, S.; Honma, H.; Ji, C.H.; Fujita, H. MEMS vibrational energy harvesters. Sci. Technol. Adv. Mater. 2019, 20, 124–143. [Google Scholar] [CrossRef] [Green Version]
- Roundy, S.; Wright, P.K.; Rabaey, J. A study of low level vibrations as a power source for wireless sensor nodes. Comput. Commun. 2003, 26, 1131–1144. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Yeatman, E.M.; Rao, G.K.; Holmes, A.S.; Green, T.C. Energy Harvesting From Human and Machine Motion for Wireless Electronic Devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef] [Green Version]
- The Mathworks, Inc. MATLAB Version 9.5.0.944444 (R2018b); The Mathworks, Inc.: Natick, MA, USA, 2015. [Google Scholar]
- Analog Devices. LTC3588-1 Datasheet. Rev C. 2010. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/35881fc.pdf (accessed on 23 April 2020).
- Ashraf, K.; Khir, M.H.M.; Dennis, J.O.; Baharudin, Z. A wideband, frequency up-converting bounded vibration energy harvester for a low-frequency environment. Smart Mater. Struct. 2013, 22, 025018. [Google Scholar] [CrossRef]
- Jackson, N.; Adkins, J.; Dutta, P. Capacity over Capacitance for Reliable Energy Harvesting Sensors. In Proceedings of the 18th International Conference on Information Processing in Sensor Networks, Montreal, QC, Canada, 16–18 April 2019; ACM: New York, NY, USA, 2019; pp. 193–204. [Google Scholar] [CrossRef] [Green Version]
- Bouguera, T.; Diouris, J.F.; Chaillout, J.J.; Jaouadi, R.; Andrieux, G. Energy Consumption Model for Sensor Nodes Based on LoRa and LoRaWAN. Sensors 2018, 18, 2104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomez, C.; Veras, J.C.; Vidal, R.; Casals, L.; Paradells, J. A Sigfox Energy Consumption Model. Sensors 2019, 19, 681. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tozlu, S. Feasibility of Wi-Fi enabled sensors for Internet of Things. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 291–296. [Google Scholar] [CrossRef]
- Texas Instruments Incorporated. CC3100 SimpleLink™ Wi-Fi® Network Processor, Internet-of-Things Solution for MCU Applications. Revision 2015 ed. 2015. Available online: https://www.ti.com/lit/ds/swas031d/swas031d.pdf (accessed on 2 March 2020).
- Decawave Ltd. DW1000 Datasheet. Revision 2.09. 2015. Available online: https://www.decawave.com/sites/default/files/resources/dw1000-datasheet-v2.09.pdf (accessed on 2 March 2020).
- Semtech Corporation. SX1272/73-860 MHz to 1020 MHz Low Power Long Range Transceiver. 2019. Available online: https://semtech.my.salesforce.com/sfc/p/#E0000000JelG/a/440000001NCE/v_VBhk1IolDgxwwnOpcS_vTFxPfSEPQbuneK3mWsXlU (accessed on 2 March 2020).
- Atmel Corporation. ATA8520 Single-Chip SIGFOX RF Transmitter—Datasheet. 2015. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-9372-Smart-RF-ATA8520_Datasheet.pdf (accessed on 2 March 2020).
- Nordic Semiconductor Ltd. Nordic Semiconductor Devzone. Available online: https://devzone.nordicsemi.com/nordic/power/w/opp/2/online-power-profiler-for-ble (accessed on 2 March 2020).
- Texas Instruments Incorporated. 2.4 GHz IEEE 802.15.4 / ZigBee-Ready RF Transceiver. Revision 2015 ed.. 2019. Available online: https://www.ti.com/lit/ds/symlink/cc2420.pdf (accessed on 2 March 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| number of datasets | 33 |
| number of horses | 6 |
| horse age | 7–19 |
| Sampling rate | 25–1600 Hz |
| sand mixed | |
| Surface | with GEOPAT polyflakes (31 datasets) |
| hard (1 dataset)/ field (1 dataset) | |
| length datasets | 1.93 × 106 samples |
| total dataset time | 5.36 h |
| datasets with standing | 27 |
| datasets with walking | 30 |
| datasets with trot | 25 |
| datasets with canter | 23 |
| x | y | z | |
|---|---|---|---|
| (W) | (W) | (W) | |
| stand | 0.01 | 0 | 0 |
| walk | 1.76 | 3.07 | 0.43 |
| trot | 4.28 | 11.82 | 1.56 |
| canter | 8.56 | 25.71 | 4.23 |
| other | 2.25 | 6.49 | 1.39 |
| total | 2.41 | 6.23 | 0.99 |
| Before Optimization (W) | After Optimization (W) | Total Number of Samples | |
|---|---|---|---|
| stand | 0 | 0.01 | |
| walk | 3.07 | 7.39 | |
| trot | 11.82 | 30.19 | |
| canter | 25.71 | 64.04 | |
| other | 6.49 | 16.12 | |
| total | 6.23 | 15.52 |
| Stand | Walk | Trot | Canter | Other | Total | |
|---|---|---|---|---|---|---|
| Energy (J) | 0.23 | 9.47 | 21.00 | 35.37 | 17.39 | 14.34 |
| steps | 30 | 4317 | 4713 | 1939 | 2067 | 13,159 |
| Length step (s) | ✗ | 1.3 | 0.8 | 0.63 | ✗ | ✗ |
| Horse | 1 | 2 | 3 | 4 | 5 | 6 |
| nr datasts | 5 | 12 | 5 | 11 | 1 | 1 |
| Optimized | ||||
|---|---|---|---|---|
| Average Power (W) | Average Power (W) | Nr of Samples | Nr of Data-Sets | |
| roll | 3.62 | 6.84 | 2731 | 6 |
| paw | 0.11 | 0.28 | 1513 | 2 |
| itching | 0.14 | 0.25 | 323 | 3 |
| cross canter | 9.55 | 33.42 | 6965 | 11 |
| kicking back | 5.65 | 41.02 | 57 | 1 |
| Technology | Chip | Transmit Current mA | Lowest Current (A) | Bytes Per Packet | Time Per Packet (ms) | Energy Per Byte (J) |
|---|---|---|---|---|---|---|
| LoRa | SX1272 [58] | 18 | 0.1 | 10 | 3.74 | 22.22 |
| SigFox | ATA8520 [59] | 27.2 | 16 | 12 | 2080 | 15,558.00 |
| BLE | nRF52840 [60] | 4 | 0.4 | 10 | 0.208 | 0.28 |
| 802.15.4 | CC2420 [61] | 8.5 | 0.02 | 8 | 6 | 21.04 |
| WiFi | CC3100 [56] | 160 | 4 | 8 | 11.3 | 745.80 |
| UWB | DW1000 [57] | 160 | 0.05 | 10 | 0.17 | 8.98 |
| 1 | 2 | 3 | 4 | |
|---|---|---|---|---|
| LoRa | ✗ | ✗ | 10.14 s | 6.99 s |
| SigFox | ✗ | ✗ | ✗ | 33,271 s |
| BLE | ✗ | ✗ | 0.06 s | 0.04 s |
| WiFi | ✗ | ✗ | 449 s | 270 s |
| UWB | ✗ | ✗ | 2.42 s | 1.67 s |
| 802.15.4 | ✗ | ✗ | 4.69 s | 3.24 s |
| Scenario 3 | Scenario 4 | |||||
|---|---|---|---|---|---|---|
| x | y | z | x | y | z | |
| stand | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ |
| walk | ✗ | ✗ | ✗ | ✗ | 0.69 s | ✗ |
| trot | ✗ | 0.32 s | ✗ | 0.32 s | 0.09 s | ✗ |
| canter | 0.28 s | 0.06 s | ✗ | 0.09 s | 0.04 s | 0.52 s |
| other | ✗ | ✗ | ✗ | 0.60 s | 0.19 s | ✗ |
| all | ✗ | ✗ | ✗ | 0.82 s | 0.21 s | ✗ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Herbruggen, B.; Fontaine, J.; Eerdekens, A.; Deruyck, M.; Joseph, W.; De Poorter, E. Feasibility of Wireless Horse Monitoring Using a Kinetic Energy Harvester Model. Electronics 2020, 9, 1730. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101730
Van Herbruggen B, Fontaine J, Eerdekens A, Deruyck M, Joseph W, De Poorter E. Feasibility of Wireless Horse Monitoring Using a Kinetic Energy Harvester Model. Electronics. 2020; 9(10):1730. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101730
Chicago/Turabian StyleVan Herbruggen, Ben, Jaron Fontaine, Anniek Eerdekens, Margot Deruyck, Wout Joseph, and Eli De Poorter. 2020. "Feasibility of Wireless Horse Monitoring Using a Kinetic Energy Harvester Model" Electronics 9, no. 10: 1730. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9101730