
Unifying Theory for Casimir Forces: Bulk and Surface Formulations

1
Dipartimento di Fisica E. Pancini, Università di Napoli Federico II, Complesso Universitario di Monte S. An-gelo, Via Cintia, I-80126 Napoli, Italy
2
INFN Sezione di Napoli, I-80126 Napoli, Italy
3
Laboratoire de Physique Théorique et Modèles Statistiques, CNRS UMR 8626, Université Paris-Saclay, 91405 Orsay CEDEX, France
*
Author to whom correspondence should be addressed.
Universe 2021, 7(7), 225; https://0-doi-org.brum.beds.ac.uk/10.3390/universe7070225
Submission received: 30 May 2021
/
Revised: 20 June 2021
/
Accepted: 30 June 2021
/
Published: 4 July 2021
(This article belongs to the Special Issue The Casimir Effect: From a Laboratory Table to the Universe)
{kind=link}
{kind=link}
Abstract
:The principles of the electromagnetic fluctuation-induced phenomena such as Casimir forces are well understood. However, recent experimental advances require universal and efficient methods to compute these forces. While several approaches have been proposed in the literature, their connection is often not entirely clear, and some of them have been introduced as purely numerical techniques. Here we present a unifying approach for the Casimir force and free energy that builds on both the Maxwell stress tensor and path integral quantization. The result is presented in terms of either bulk or surface operators that describe corresponding current fluctuations. Our surface approach yields a novel formula for the Casimir free energy. The path integral is presented both within a Lagrange and Hamiltonian formulation yielding different surface operators and expressions for the free energy that are equivalent. We compare our approaches to previously developed numerical methods and the scattering approach. The practical application of our methods is exemplified by the derivation of the Lifshitz formula.
1. Introduction
The interaction induced by quantum and thermal fluctuation of the electromagnetic field is an everyday phenomenon that acts between all neutral objects, both on atomic and macroscopic scales [1,2,3,4,5]. For the Casimir interaction between macroscopic bodies, the last two decades have witnessed unparalleled progress in experimental observations and the development of novel theoretical approaches [6,7]. In most of the recent theoretical approaches, the computation of Casimir forces between multiple objects of different shapes and material composition has been achieved by the use of scattering methods or the so-called TGTG formula [8,9,10,11,12,13,14,15,16]. These approaches have the advantage of relatively low numerical effort; they are rapidly converging and can achieve in principle any desired precision [17,18,19,20,21,22]. Another merit of these methods is the exclusion of UV divergencies by performing the subtraction analytically before any numerical computation. Other efficient approaches that have been developed before the scattering approaches include path integral quantizations where the boundary conditions at the surfaces are implemented by delta functions [23]. These approaches are limited to scalar fields with Dirichlet or Neumann boundary conditions [24], or the electromagnetic field with perfectly conducting boundary conditions [25], with the exception of a similar approach for dielectric boundaries [26]. However, such analytical (and semi-analytical) methods have been restricted to symmetric and simple shapes, like spheres, cylinders or ellipsoids [27,28,29,30,31]. Geometries where parts of the bodies interpenetrate, such as those shown in Figure 1a, cannot be studied with scattering approaches. For general shapes and arbitrary geometries, new methods are needed. Purely numerical methods based on surface current fluctuations have been developed [32], but they rely on a full-scale numerical evaluation of matrices and their determinants, which complicates these approaches when high precision of the force is required.
Hence, there is a need to develop methods that predict Casimir interactions between objects of arbitrary geometries composed of materials with arbitrary frequency-dependent electromagnetic properties. The Casimir force can be viewed as arising from the interaction of fluctuating currents distributions. In fact, these effective fluctuating electric and magnetic currents can be considered to be localized either in the bulk of the bodies or just on their surfaces. The surface approach relies on the observation that the electromagnetic response of bodies can be represented entirely in terms of their surfaces, known as the “equivalence principle”, which is based on the observation that many source distributions outside a given region can produce the same field inside the region [33]. The surface approach has been introduced in the literature as a method for a purely numerical computation of Casimir interactions [32]. There are two different methods to implement the idea of computing Casimir forces from fluctuating currents. One can either integrate the Maxwell stress tensor over a closed surface enclosing the body, directly yielding the Casimir force, or integrate over all electromagnetic gauge field fluctuations in a path integral, yielding the Casimir free energy. We shall consider both approaches here.
Compared to scattering theory-based approaches, the surface formulation has the advantage that it does not require the use of eigenfunctions of the vector wave equation that are specific to the shape of the bodies. Hence, our approach is applicable to general geometries and shapes, including interpenetrating structures. In fact, the power of the surface approach has been demonstrated by numerical implementations in Reference [32], where it was used to compute the Casimir force in complicated geometries.
In this paper, we present both the Maxwell stress tensor and path integral-based approaches for the Casimir force and free energy in terms of bulk or surface operators. Our main advancements are
- A new, compact and elegant derivation of the Casimir force from the Maxwell stress tensor within both a T-operator approach and a surface operator approach;
- A new surface formula for the Casimir free energy expressed in terms of a surface operator;
- A new path integral-based derivation of a Lagrange and Hamiltonian formulation for the Casimir free energy.
We also compare the approaches presented here to methods existing in the literature. For the special case of bodies that can be separated by non-overlapping enclosing surfaces, along which one of the coordinates in which the wave equation is separable is constant, our approach is shown to be equivalent to the scattering approach. Our approaches also show the general equivalence of the use of the Maxwell stress tensor in combination with the fluctuation-dissipation theorem on one side and the path integral representation of the Casimir force on the other side. As the most simple application of our approaches, we re-derive the Lifshitz formula for the Casimir free energy of two dielectric slabs. Other analytical applications of our approach will be presented elsewhere.
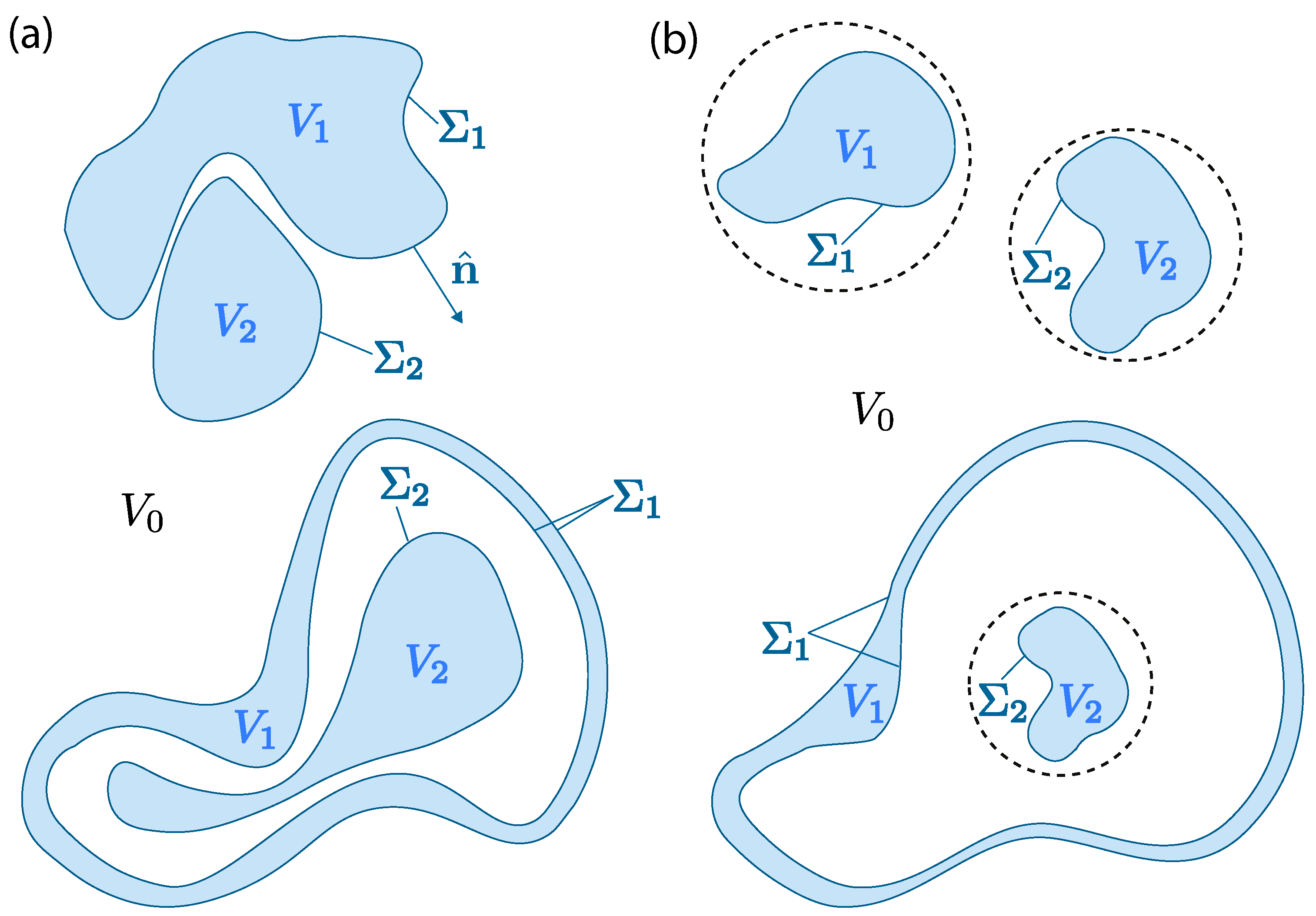
The geometries and shapes to which our approaches can be applied are shown in Figure 1a. For comparison, in Figure 1b, we display non-penetrating bodies to which scattering theory-based approaches are limited. In general, we assume a configuration composed of N bodies with dielectric functions and magnetic permeabilities , . The bodies occupy the volumes with surfaces and outward pointing surface normal vectors . The space with volume in between the bodies is filled by matter with dielectric function and magnetic permeability .
2. Stress-Tensor Approach
2.1. Bulk and Surface Expressions for the Force
Consider a collection of N magneto-dielectric bodies in vacuum. In the stress-tensor approach, the (bare) Casimir force on body r is obtained by integrating the expectation value of the Maxwell stress tensor
over any closed surface drawn in the vacuum, which surrounds that body (but excludes all other bodies):
where is the unit normal oriented outside , and the angular brackets denote the expectation value taken with respect to quantum and thermal fluctuations. For a system in thermal equilibrium at temperature T, the (equal-time) expectation values of the products of field components (at points and in the vacuum region) are provided by the fluctuation-dissipation theorem [34,35]:
where are the Matsubara imaginary frequencies, and the prime in the summations mean that the term is taken with a weight of one half. When the r.h.s of the above equations are plugged into Equation (1), one obtains for a formally divergent expression, since the Green functions are singular in the coincidence limit . This divergence can however be easily disposed of by noticing that the Green’s functions admit the decomposition:
where is the Green’s function of free space, while describes the effect of scattering of electromagnetic fields by the bodies. In the coincidence limit, only diverges, while attains a finite limit. When the decomposition in Equation (4) is used to evaluate the r.h.s. of Equation (1), one finds that the expectation value of the stress tensor is decomposed in a way analogous to Equation (4):
where is the divergent expectation value of the stress tensor in empty space, and is the finite expression
Since the divergent contribution is independent of the presence of the bodies, one can just neglect it and then one obtains the following finite expression for the Casimir force on body r due to the presence of the other bodies,
The further development of the theory starts from the observation that the dyadic Green’s functions (for brevity, from now on we shall not display the dependence of the Green’s functions on the Matsubara frequencies ) can be expressed in two distinct possible forms.
The first representation is general, since it is valid for arbitrary constitutive equations of the magneto-dielectric materials constituting the bodies, which can possibly be non-homogeneous, anisotropic, and non-local. For all points and , it expresses in the form of an integral of the T-operator (for its definition, see Appendix B.1) over the volumeV occupied by all bodies:
The above formula has a simple intuitive interpretation, if one recalls that according to its definition, the T-operator provides the polarization induced in the volume of the bodies when they are immersed in the electromagnetic field generated by a certain distribution of external sources.
The second representation is less general than Equation (8) because it applies only to magneto-dielectric bodies that are (piecewise) homogeneous and isotropic 1. It expresses in the form of an integral of the surface operator defined in Equation (A44), over the union of the surfaces of the bodies. For two points and both lying in the vacuum region outside the bodies2, the surface representation of reads:
where is the equation of the surface . This representation also has a simple intuitive meaning, if one considers that (see Appendix B.2 for details) is defined as the operator that provides the fictitious surface polarizations that radiate outside the bodies the same scattered electromagnetic field as the one radiated by the physically induced volumic polarization, in response to an external field. The derivations of Equations (8) and (9) are presented in Appendix B. It is apparent that both representations have the same mathematical structure, consisting of a two-sided convolution of a certain kernel with the free-space Green’s functions :
The only difference between the two representations consists in the expression of , which in the case of Equation (8) is the three-dimensional kernel supported in the volume V occupied by the bodies:
while in Equation (9) is the two-dimensional kernel supported on the union of their surfaces:
In both cases, the above equation can be concisely written using the operator notation described in Appendix A:
In Appendix C, we prove that the structure of the representation of given in Equation (10), allows to re-express the Casimir force Equation (7) in the following remarkably simple form:
A crucial role in the derivation of Equation (14) is played by the fact that the kernel satisfies a set of reciprocity relations analogous to those satisfied by the Green’s functions:
where and . It is possible to verify that the reciprocity relations satisfied by and ensure vanishing of the “self-force” :
This implies that in Equation (14) the integral is in fact restricted to , in accord with one’s intuition that the force on body r is due to the interaction with the other bodies. It is possible to present Equation (14) in a more compact and symmetric form, by defining the derivative of any kernel , with respect to rigid translations of the r-th body:
where is the characteristic function of : if , if . Using , we can rewrite Equation (14) as
The expression on the r.h.s. of the above formula can be compactly expressed using the operator notation and the trace operation described in Appendix A:
Depending on whether we use for the kernel the T-operator of Equation (8) or rather the surface operator of Equation (9), Equation (19) provides us with two distinct but formally similar representations of the Casimir force, which is expressed either as an integral over the volume V occupied by the bodies or as an integral over their surfaces . One feature of Equation (19) is worth stressing. Since the force is expressed as a trace, Equation (19) can be evaluated in an arbitrary basis, leaving one with complete freedom in the choice of the most convenient basis in a concrete situation. A representation of the Casimir force in the form of a volume integral equivalent to Equation (19) was derived in [11], while the surface-integral representation was obtained in [32]. Equation (19) can be computed numerically for any shapes and dispositions of the bodies, by using discrete meshes covering the bodies. An efficient numerical scheme based on surface-elements methods is described in [32], where it was used to compute the Casimir force in complex geometries, not amenable to analytical techniques.
2.2. Casimir Free Energy
In this section, we compute the Casimir free energy of the system of bodies, starting from the force formula Equation (19). We shall see that the T-operator and the surface-operator approaches lead to two distinct but equivalent representations of the Casimir energy.
2.2.1. T-Operator Approach
Plugging into Equation (19) the expression of the T-operator Equation (A36), we find that the Casimir force can be expressed in the form:
where in the last passage, we made use of the fact that the polarization operator defined in Equation (A24) is invariant under a rigid displacement of the body. The r.h.s. of the above equation can be formally expressed as a gradient:
where is the bare free energy:
Unfortunately, is formally divergent. To obtain the finite Casimir free energy , one has to subtract from the divergent self-energies of the individual bodies:
where is the polarizability operator of body r in isolation. In the case of a system composed by two bodies, the renormalized Casimir free energy can be recast in the following TGTG form:
where
is the T-operator of body r in isolation. To prove Equation (24), one notes that for each Matsubara mode the operator identity holds:
The above identity in turn allows to prove the following chain of identities:
Equating the first line with the last line, we obtain the identity:
Upon summing the above identity over all Matsubara modes (with weight one half for the term), and then multiplying it by , we find:
which is equivalent to Equation (24). The energy formula Equation (24) was derived in [13] using the path-integral method and in [11], using Rytov’s fluctuational electrodynamics [36].
2.2.2. Surface Operator Approach
Now we derive the surface-operator representation of the Casimir energy. To do that, we start from the surface-operator representation of the force, which is obtained by replacing in Equation (19) with minus the inverse of the surface operator defined in Equation (A44):
This can also be written as:
where is the tangential projection operator defined in Appendix B.2. Now, one notes the identity:
which is a direct consequence of Equation (A44) since
The r.h.s. of the above equation can be formally expressed as a gradient:
where is the bare free energy:
Similarly to what we found in the T-operator approach, the surface formula of the bare-energy is formally divergent. The finite Casimir free energy is obtained by subtracting from the limit of the bare energy when the bodies are taken infinitely apart from each other. From Equation (A44), one sees that in the limit of infinite separations, the operator approaches the limit
where
Notice that the surface operator is localized onto the surface of the r-th body. This implies that:
Using Equation (37), we find that is the formally divergent quantity:
The additive character of allows to interpret as representing the (infinite) the self-energy of the bodies in the surface approach. Upon subtracting Equation (40) from Equation (36), we arrive at the following formula for the Casimir energy:
An easy computation shows that
where
Substitution of the above formula into Equation (41) results in the following surface formula for the Casimir energy:
In the simple case of two bodies, the above formula reduces to:
The surface formulas for the Casimir energy given in Equations (44) and (45) were not known before and are presented here for the first time. Comparison of Equation (45) with Equation (24) reveals the striking similarity of the T-operator and surface-approach representations of the Casimir energy. Indeed we see that both formulas can be written in the form:
where is the kernel, which gives the scattering Green’s function of body r in isolation:
3. Equivalence of the Surface-Formula with the Scattering Formula for the Casimir Energy
In the previous sections, we have shown that, both in the T-operator and in the surface approaches, the Casimir energy of two bodies can be expressed by the general Equation (46). This formula is valid for any shape and relative dispositions of the two bodies, and in particular for two interleaved bodies (see Figure 1a). Now we show that when the two bodies can be enclosed within two non-overlapping spheres (see Figure 1b), Equation (46) is the same as the well-known scattering formula [8,9,10,11,12]:
where is the scattering matrix of body r (see Equation (A76) for the definition of ), are the translation matrices defined in Equation (A82) and denotes a trace over multipole indices.
To prove equivalence of Equation (46) with Equation (48), one starts from the observation that the trace operation in Equation (46) involves evaluating the Green functions at points and , one of which (call it ) belongs to body 1, while the other (call it ) belongs to body 2. For two bodies that can be separated by non-overlapping spheres, it is warranted that and , where and are the positions of the centers of the spheres and , respectively, and is their distance. This condition satisfied by and ensures that it is legitimate to express (with ) by the partial-wave expansion (see Appendix D):
where are a basis of regular and outgoing spherical waves with origin at . When the above expansion is substituted into Equation (46) and the trace is evaluated, one finds that can be recast in the form:
where is the matrix of elements:
Recalling the formula Equation (A79) for the scattering matrices of the two bodies, we see that is the matrix:
4. Path Integral Approach
As in the previous sections, we consider again N dielectric bodies occupying the volumes , , bounded by surfaces . Their electromagnetic properties are described by the dielectric functions and magnetic permeability . The bodies are embedded in a homogeneous medium occupying the outside volume of the bodies, , with dielectric function and magnetic permeability .
In the Euclidean path integral quantization of the electromagnetic field, the Casimir free energy at finite temperature T can be obtained as
where the sum runs over the Matsubara momenta , with a weight of for . The partition function is given by a path integral that we shall derive now. The partition function describes the configuration of infinitely separated bodies and subtracts the self-energies of the bodies from the bare free energy. In the following two sections, we shall derive both a Lagrangian and a Hamiltonian path integral expression of the partition function. In both cases, we employ a fluctuating surface current approach. A path integral approach that is based on bulk currents can be found, e.g., in Reference [10].
4.1. Lagrange Formulation
The action of the electromagnetic field coupled to bound sources in the absence of free sources is in general given by
In the following, we express the action in terms of the gauge field choosing the transverse or temporal gauge with . The functional integral will then run over only. The electric field is given by and the magnetic field by . Then the action in terms of the induced sources at fixed frequency is given by
for fluctuations of the gauge field, and induced bulk currents inside the objects. The inverse of the kernel of the quadratic part of this action is given by the Green tensor , which is defined by
For spatially constant and with body r, this yields the free Green’s tensor
which is symmetric, reflecting reciprocity. From the relation between the gauge field and the electric field follows the relation , which allows to compare the results below to those of the stress-tensor-based derivation.
Next, we define the classical solutions of the vector wave equation in each region , obeying
We use this definition together with the fact that has no sources inside , i.e., obeys above wave equation with vanishing right-hand side, to rewrite the source terms of Equation (54) as
Now we have to consider the electric field only on the surfaces . However, the values of the electric field and its curl are those when the surface is approached from the inside, denoted by and . It is important to realize that in the above surface integral, and multiply vectors that are tangential to the surface, and hence only the tangential components of and contribute to the integral. Hence, we can use the continuity conditions of the tangential components of and ,
to write the source terms as
where the first form applies to inside the objects and the second form to outside the objects. There is another advantage of having expressed the latter integrals in terms of the values of and when the surfaces are approached from either the outside or the inside of the objects. In the region , the field is fully determined by its values on the surfaces and the dielectric function and permeability , which are constant across . When integrating out , in fact, one computes the two-point correlation function of and on the surfaces , and hence the behavior of inside the regions with is irrelevant. Following the same arguments for inside the objects, the behavior of outside of region is irrelevant for computing the correlations of and on the surfaces . Hence, we can replace in the action the spatially dependent by when the coupling of to the surface fields is represented by the second line of Equation (60), and similarly replace by when the coupling of to the surface fields is represented by the first line of Equation (60).
That this is justified can also be understood as follows. The field in region can be expanded in a basis of functions that obey the wave equation with . The same can be done for in the interior of each object, i.e., can be expanded in a basis of functions that obey the wave equation with in . For each given set of expansion coefficients in there are corresponding coefficients within each region that are determined by the continuity conditions at the surfaces . The functional integral over then corresponds to integrating over consistent sets of expansion coefficients that are related by the continuity conditions. The two-point correlations of and on the surfaces are then fully determined by the integral over the expansion coefficients of in only, and the interior expansion coefficients play no role. Equivalently, the two-point correlations of and on the surfaces are then fully determined by the integral over the expansion coefficients of in only, and now the exterior expansion coefficients are irrelevant. Hence, in the functional integral, the integration of can be replaced by integrations over the fields , , where each is allowed to extend over unbounded space with the action for a free field in a homogeneous space with , . However, it is important that the correct of the two possible forms of the surface integral in Equation (60) is used. The multiple counting of degrees of freedom that results from functional integrations poses no problem since the (formally infinite) factor in the partition function cancels when the Casimir energy is computed from Equation (52).
With this representation, we can write the partition function as a functional integral over , separately in each region , and the surface fields on body r, leading to the partition function
with the action
Now, the fluctuations can be integrated out easily, noting that the two point correlation function for all r, with , and for equal-region correlations
where ∇ always acts on the argument of and the notation means that ∇ acts column-wise on the tensor whereas means that ∇ acts row-wise on the tensor . We obtain for the partition function
with the kernels
where is the free Green function of Equation (56), and the arrow over the placeholder · indicates to which side of the kernel M acts. This notation implies that the derivatives are taken before the kernel is evaluated with and on the surfaces .
4.2. Hamiltonian Formulation
The representation of the partition function in the previous subsection sums over all configurations of the surface fields , and the action depends both on and the tangential part of its curl, which is functionally dependent on . Hence, the situation is similar to classical mechanics where the Lagrangian depends on the trajectory and its velocity . The Lagrangian path integral runs then over all of path with determined by the path automatically. To obtain a representation in terms of a space of functions that are defined strictly on the surfaces only, it would be useful to be able to integrate over and its derivatives independently. In classical mechanics, this is achieved by Lagrange multipliers that lead to a Legendre transformation of the action to its Hamiltonian form. Here the situation is similar. To see this, it is important to realize that the bilinear form described by is degenerate on the space of functions over which the functional integral runs, i.e., for all that are regular solutions of the vector wave equation inside region . With a basis for this functional space, the elements of can be expressed as
where we used the relations of Equation (58), and defined
and made use of the fact that is also a solution of the vector wave equation inside . This implies that the kernel can be ignored in the above functional integral over regular waves inside the objects.
However, the appearance of the kernel is important in what follows. Let us consider the part of the action which, after functional integration over , generates the kernel . It is given by
The exponential of this action can be written as a functional integral over two new vector fields and that are defined on the surfaces and are tangential to the surfaces,
where is some normalization coefficient, and we have used to indicate that the functional integral extends only over vector fields that are tangential to the surface . This representation shows that acts as a Lagrange multiplier. Integration over this field removes the imposed constraints between the dependent tangential fields , by replacing them with the independent tangential fields and , respectively.
Substituting Equation (72) for each object into the expression for the partition in Equation (61), we obtain with the partition function
with the kernel from Equation (72),
and with the effective action
where we have integrated out for , constraining the functional integral over to be replaced by the substitutions and . Integrating out , finally yields
with the additional kernel
It should be noted again that the functional integral in Equation (76) runs over tangential vector fields , defined on the surfaces only. The kernels and can be combined into the joint kernel
Since acts in the path integral only on tangential vectors, the projections of on the tangent space of the surfaces have to be taken. Let , be two tangent vector fields that span the tangent space of at . The matrix kernels then become
and
which expresses all kernels in terms of tangential and normal derivatives of the scalar Green function . These expressions simplify when an orthonormal basis , , is used. The Casimir free energy is then given by
where the determinant runs over all indices, i.e., , located on the surfaces , and r, . The kernel is obtained from the kernel by taking the distance between all bodies to infinity, i.e, by setting for all . In the following we shall again denote the form of the partition function in Equation (67) as Lagrange representation, and the one of Equation (76) as a Hamiltonian representation. By a simple computation, one can verify that the Hamiltonian representation of the Casimir free energy in Equation (79) is indeed equivalent to the surface formula Equation (44).
5. Application: Derivation of the Lifshitz Theory
As a simple example to demonstrate the practical application of the surface formulations, we consider two dielectric half-spaces, one covering the region , with the surface and dielectric function and magnetic permeability , and the other covering the region , with the surface and dielectric function magnetic permeability . We shall consider both the Lagrange and Hamiltonian representation in the following.
5.1. Lagrange Representation
We compute the matrix elements of the kernels L and M of Equation (68) in the basis of transverse vector plane waves, given by
with and the sign of z is fixed so that the waves are regular inside the half-spaces. Note that we include here a z dependence to be able to compute the curl on the surfaces. For the Green tensor, we use the representation
which yields after the curl operations
We also need the following expressions for the operators that appear in the kernels, acting on the basis functions, which are tangential to the surfaces. On surface we have
and similarly on surface ,
It is straightforward to show that the matrix elements of in the above basis all vanish, as the basis functions are regular solutions of the vector wave equation. This observation is in agreement with the above finding that the kernel is degenerate on the space of those solutions. We proceed with the computation of the elements of kernel M. We find for the case ,
and for the case we get
where the sign in determines upon integration over the sign of the terms . The vanishing of the off-diagonal elements reflects the fact that the two polarizations described by the basis functions and do not couple for planar surfaces. The total kernel M can be written as
The Casimir free energy is given by
in terms of the determinant of the matrix
which has four dimensions due to two sets of basis functions (polarisations) and per surface. This yields the final result
This result is in agreement with the Lifshitz formula [37].
5.2. Hamiltonian Representation
Now we derive the Lifshitz expression for the free energy of two dielectric half-spaces in the Hamiltonian representation. Since the kernels and of Equations (74) and (77) act on vector fields that are tangential to the surfaces, we need to compute the matrix elements in a basis of tangential vectors and that span the tangent space of surface at position . For a planar surface, one can simply set and . For a given pair of positions , on the surface and fixed surface indices r, we obtain the following dimensional matrices
where we set and for surfaces 1 and 2, respectively. We determined the sign of the terms from the -integration by the observation that z, have to be taken to the surface with staying inside the object. The upper (lower) sign of refers to ().
Analogously, for kernel M we get for the case
and for ,
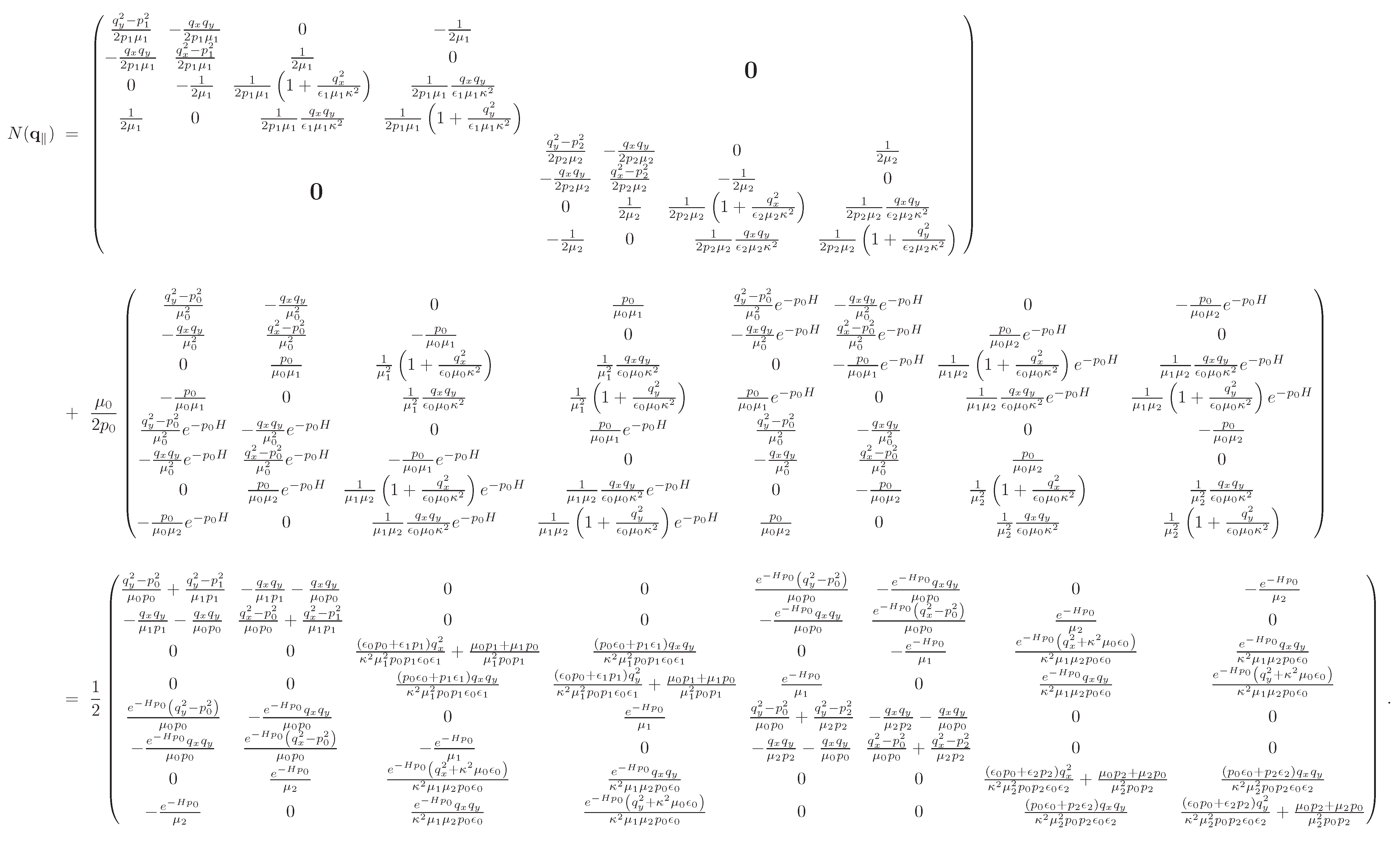
where again the upper (lower) sign everywhere refers to (). For the kernel we determined the sign of the terms from the -integration by the observation that z, have to be taken to the surface with staying outside the object. When combining the kernels and into the joint kernel , it is diagonal in -space with the blocks on the diagonal given by the matrix shown in Figure 2.
The Casimir free energy is given by
in terms of the determinant of the above matrix where is the matrix with , i.e., the matrix N with the off-diagonal blocks vanishing. This yields the final result
which is again identical to the Lifshitz formula. Note that in the Hamiltonian approach there is no need to express the kernels in a basis for the space of functions that are regular solutions of the wave equation inside the objects. However, the number of fields per surface is now doubled compared to the Lagrangian approach, resembling the situation in quantum mechanics where the Hamiltonian path integrals run over the canonical coordinates q and p independently.
6. Conclusions
To date, analytical and purely numerical approaches to compute Casimir interactions have been developed independently, and it remained an open question if and how they are related. Analytical methods build on ideas from scattering theory and hence require an expansion of the Green function and bulk or surface operators in terms of special functions that are solutions of the wave equation. Hence, the very existence of such functions and the convergence of the expansion limit these approaches to sufficiently symmetric problems. Purely numerical approaches, such as that developed in [32], can be applied to basically arbitrary geometries but the numerical effort can be extremely high. Hence, it appeared useful to us to study the relation between these approaches in order to develop methods that can serve as semi-numerical approaches that combine the versatility of the purely numerical approaches with the smaller numerical effort of analytical methods. Hence, we have presented in this work a new compact derivation of formulas for the Casimir force, which is based both on bulk and surface operators that also enable analytical evaluations. This we have demonstrated for the simplest case of two dielectric slabs. Further semi-analytical implementations of our approaches are underway.
Our Hamiltonian path integral representation is equivalent to the one derived by Johnson et al. as a purely numerical approach using Lagrange multipliers to enforce the boundary conditions in the path integral. Interestingly, the here-presented derivation of this representation from a Lagrangian path integral demonstrates the relation of this approach to the scattering approach when the T-matrix is defined, as originally by Waterman, by surface integrals of regular solutions of the wave equation over the bodies’ surfaces [38]. This shows the close connection of these approaches, motivating further research in the direction of new semi-analytical methods to compute Casimir forces.
Author Contributions
Both authors contributed equally to the present work. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Dyadic Green’s Functions and Notations
It is well known [34] that the expectation values of quantum fields in systems in thermal equilibrium can be expressed, via the Matsubara formalism, in terms of the analytic continuation to the positive imaginary axis of the appropriate Green’s functions. Along the imaginary axis, response functions have a simpler behavior than along the real frequency axis. For example, it can be shown that the electric and the magnetic permittivities of a magneto-dielectric medium are real-valued and positive definite for imaginary frequencies [39]. In the same manner, retarded Green’s functions are real-valued for positive imaginary frequencies. In this Appendix, we briefly review their definitions and main properties.
To be specific, consider a system consisting of a collection of possibly spatially dispersive magneto-dielectric bodies in vacuum, occupying the (non-overlapping) regions of space , …, . We let be the vacuum region that separates the bodies. The electromagnetic response of the system is described by the following real-valued and positive definite frequency-dependent electric and magnetic permittivities
where is the permittivity of the vacuum. For local media, , and . The principle of microscopic reversibility [40] requires that the permittivities satisfy the symmetry relations:
The imaginary-frequency Maxwell’s Equations are:
where , and are the external polarization and magnetization, and
At the boundary separating media r and s, the tangential components of and are continuous:
where is the unit normal to the boundary. The dyadic Green’s functions are defined such that:
It can be shown [33] that the Green’s function satisfies the reciprocity relations:
where and .
In a local medium:
In a local medium, it is possible to express the three Green’s function , and in terms of the electric Green’s function , as:
where denotes derivation w.r.t. , acting from right. The electric Green function solves the differential Equation:
In the case of a homogeneous isotropic medium, this Equation can be solved explicitly:
From Equations (A9)–(A11), one then gets:
where
is the Green’s function of the scalar Helmoltz Equation in free space:
It is convenient to introduce a compact notation for the fields and the Green’s functions. We collect the fields and the sources into six-rows column-vectors:
The defining Equations of the Green’s functions Equation (A6) can then be interpreted as defining the action of the linear operator onto the vector :
With this notation, the reciprocity relations Equation (A7) are expressed by the operator Equation:
where is the diagonal matrix of elements . The electric and the magnetic permittivities in Equation (A1) can be both collected into the permittivity operator . Equation (A1) becomes:
where the operator is
The constitutive Equations (A4) are expressed as:
For later use, it is convenient to define the polarization operator :
Equation (A1) implies that the polarizability of a collection of bodies is:
where is the polarizability of body r. Clearly is supported in the volume . This implies:
Finally, we define the trace operation of any operator :
Appendix B. Derivation of Equation (10)
In this Appendix, we derive the volumic and surface representations, Equation (8) and Equation (9), respectively, for the scattering Green function .
Appendix B.1. Volumic Representation
Let be the external field generated by a certain distribution of external sources . If one or more magneto-dielectric bodies are exposed to the field , they get polarized, and we let be the induced polarization field. The polarization field depends linearly on the external field :
The above equation defines the T-operator of the system. The definition of the T-operator implies that the scattered field produced by the bodies is:
However, by definition of :
A comparison of the above two equations gives:
which coincides with Equation (8).
Now we show that the T-operator can be expressed in terms of the polarizability operator . Indeed, by definition of polarizability it holds:
where the total field is the sum of the external field and of the induced field generated by . Therefore:
Using Equation (A28) to eliminate from the previous equation, we find:
Since the above equation holds for an arbitrary distribution of sources , i.e., for an arbitrary external field , it implies the operator identity:
The above relation constitutes an equation of Lippmann–Schwinger form, which determines the T-operator. Its formal solution is:
Appendix B.2. Surface Representation
In this section, we derive the surface formula Equation (9) of the scattering Green’s function. The existence of this representation is a direct consequence of the equivalence principle [33] of classical electromagnetism. This principle is applicable to bodies constituted by homogeneous and isotropic magneto-dielectric materials whose electric and magnetic permeabilities are of the form3:
The equivalence principle expresses the scattered field in terms of fictitious equivalent currents in a homogeneous medium replacing the scatterer. Let be the electromagnetic field that solves the Maxwell Equations (A3), with the constitutive Equation (A4) and the permittivities and as in Equation (A37), subjected to the boundary conditions Equation (A5) on the surfaces of N bodies in a vacuum. According to the equivalence principle, there exist tangential surface polarizations concentrated on the union of the surfaces of the bodies: such that the field can be expressed as
where is the restriction of the surface current to the surface of the r-th body, , is the Green’s functions of an infinite homogeneous medium having constant electric and magnetic permittivities equal to and , respectively, and
is the external field generated by . The Green’s functions are obtained by replacing and by and , respectively, in Equations (A12)–(A15). The equivalence principle shows [33] that the surface currents coincide with the tangential values of the field on the surface :
In concrete applications of the surface current method to scattering problems, the surface current is unknown. However, it can be uniquely determined a posteriori by imposing the requirement that the field in Equation (A38) has continuous tangential components across the boundaries of the N bodies. This requirement leads to the following set of Equations:
where is the surface operator, which acts on the field by projecting it onto the tangential plane to at :
Equation (A41) can be recast in the form:
where is the surface operator
where The operator is invertible [41]. Equation (A43) then determines the unique surface current that solves the boundary-value problem:
Note that according to its definition, acts on tangential fields defined on the union of the surfaces of the bodies and returns as a result a tangential polarization field defined on . Suppose now that the external sources are localized in the vacuum region :
Since , Equation (A45) now gives:
According to Equation (A38), the scattered field in the vacuum region is:
The above equation shows that when and belong to , the scattering Green’s function is:
We thus see that in the vacuum outside the bodies has precisely the form of Equation (13), with
Appendix C. Proof of the Force Formula Equation (14)
In this Appendix, we demonstrate the force formula Equation (14). The simple proof presented below holds for smooth kernels . Unfortunately, the kernels involved in both the volume and the surface representations of the scattering Green’s functions lack the necessary smoothness. Indeed the T-operator in Equation (8) is in general discontinuous on the surfaces of the bodies. As to the surface operator in Equation (9), it is a singular kernel supported on the surfaces of the bodies. Fortunately, it is possible to remedy this difficulty by representing the kernel as the limit of a one-parameter family of smooth real kernels that are supported on an arbitrarily small open neighborhood of the domain of the original kernel :
The approximating kernels can be so defined as to satisfy the reciprocity relations Equation (15)4:
where we recall that is defined such that and . It thus holds:
where we set
For brevity, below we shall omit writing the parameter , and we shall consider the limit only at the end. In the first step, we use reciprocity relations satisfied by the free-space Green function to rewrite Equation (A54) as:
Next, one notes that, by virtue of the reciprocity relations Equation (A52), the real kernel is symmetric, and therefore, it can be diagonalized:
where the eigenvalues are non-vanishing real numbers, and the eigenvectors are real smooth fields supported in . By plugging the above expansion into Equation (A55), we see that can be expressed as:
where are the real fields:
Now one notes that the fields are well defined in all space, and by construction they satisfy the following euclidean-time Maxwell Equations:
where we set , and . When the expansion Equation (A57) is substituted into Equation (6), we find for the dyad the following expression:
where
It is worth noticing that the minus sign that multiplies in Equation (A61) is a direct consequence of the factor in the r.h.s. of Equation (A57). At this point, we use the divergence theorem to convert the surface integral in Equation (7), giving the force , into a volume integral. That gives:
where is the portion of included within the surface . By using standard identities of vector calculus, and the Maxwell Equations satisfied by the fields one finds:
Upon substituting the r.h.s. of the above equation into the r.h.s. of Equation (A64) we get
If the fields and are expressed in terms of the sources and , via Equation (A58) one can recast the r.h.s. of the above equation in the form:
where in the last passage, we made use of Equation (A56), and restored the dependence of on the parameter . By taking the limit of the r.h.s., we see that Equation (A67) reproduces the formula for force in Equation (14).
Appendix D. Partial Wave Expansion and the Scattering Matrix
The Green’s function admits an expansion in partial waves in any coordinate system in which the vector Helmoltz Equation is separable. When spherical coordinates are used, the partial-wave expansion takes the form of an infinite series over spherical multipoles:
where , and are, respectively, polarization and multipole indices. The partial waves are defined as follows. For the electric field, they are: [10]:
where are the following regular and the outgoing spherical waves:
Here, is the modified spherical Bessel function of the first kind, and is the modified spherical Bessel function of the third kind. Notice the relation:
According to Maxwell Equations, the magnetic partial waves are obtained by taking a curl of the electric waves:
However, using the two relations Equations (A70) and (A73), one finds:
where , .
Next, we define the scattering matrix of an isolated object r placed in vacuum. Let be the scattering part of the Green’s function of body r in isolation. The scattering matrix is defined such that at all points lying outside a sphere containing the body in its interior and centered at the point , has the partial wave expansion:
The fact that all Green’s functions can be expressed in terms of a single scattering matrix follows from Equation (A74), together with the following identities satisfied by at all points in the vacuum outside the body, which in turn result from the identities of Equations (A9)–(A11) satisfied by the full Green’s functions in the presence of body r:
Now we prove that the scattering matrix is given by the matrix elements of the operator of body r defined in Equation (47), taken between two regular partial waves. To see this, one notes that for any two points outside the sphere , it is legitimate to replace in Equation (47) by its partial wave expansion Equation (A68). This substitution results in the expansion:
A comparison of Equation (A76) with Equation (A78) gives the desired formula:
which indeed shows that is the matrix element of the operator between two partial waves. Note that in the T-operator approach, is expressed by an integral of the body’s T-operator over the body’s volume , while in the surface approach it is an integral of the surface operator over the boundary of the body.
Now we define the translation matrices . Consider two points and in space that differ by a displacement of magnitude d along the z-axis:
The translation matrix is defined such that at all points whose distances from and are both smaller than d (i.e., and ) it holds:
It can be shown that the relation holds:
By applying the operator to both members of the Equation (A82), and recalling the definition of the magnetic partial waves Equation (A74) one finds:
which shows that the translation matrices of the magnetic partial waves coincide with those for the electric partial waves.
| 1. | This restriction is not so severe in practice, since the vast majority of Casimir experiments use test bodies that can be modelled in this way. |
| 2. | |
| 3. | Bodies that are only piecewise homogeneous can also be considered by a slight generalization of the homogeneous case. |
| 4. | For example, one can set , where is any rotationally invariant, smooth non-negative function, supported in a ball of unit radius centered in the origin, such that . |
References
- Klimchitskaya, G.L.; Mohideen, U.; Mostepanenko, V.M. The Casimir force between real materials: Experiment and theory. Rev. Mod. Phys. 2009, 81, 1827. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, A.W.; Hui, P.-C.; Woolf, D.P.; Johnson, S.G.; Lončar, M.; Capasso, F. Classical and fluctuation-induced electromagnetic interactions in micron-scale systems: Designer bonding, antibonding, and Casimir forces. Annalen Physik 2014, 527, 45–80. [Google Scholar] [CrossRef] [Green Version]
- Woods, L.M.; Dalvit, D.A.R.; Tkatchenko, A.; Rodriguez-Lopez, P.; Rodriguez, A.W.; Podgornik, R. Materials perspective on Casimir and van der Waals interactions. Rev. Mod. Phys. 2016, 88, 045003. [Google Scholar] [CrossRef]
- Bimonte, G.; Emig, T.; Kardar, M.; Krüger, M. Nonequilibrium Fluctuational Quantum Electrodynamics: Heat Radiation, Heat Transfer, and Force. Annu. Rev. Condens. Matter Phys. 2017, 8, 119–143. [Google Scholar] [CrossRef] [Green Version]
- Dalvit, D.; Milonni, P.; Roberts, D.; daRosa, F. Casimir Physics; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Golyk, V.A. Non-Equilibrium Fluctuation-Induced Phenomena in Quantum Electrodynamics. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2014. [Google Scholar]
- Rodriguez, A.W.; Capasso, F.; Johnson, S.J. The Casimir effect in microstructured geometries. Nat. Photonics 2011, 5, 211. [Google Scholar] [CrossRef]
- Emig, T.; Graham, N.; Jaffe, R.L.; Kardar, M. Casimir Forces between Arbitrary Compact Objects. Phys. Rev. Lett. 2007, 99, 170403. [Google Scholar] [CrossRef] [Green Version]
- Maia Neto, P.A.; Lambrecht, A.; Reynaud, S. Casimir energy between a plane and a sphere in electromagnetic vacuum. Phys. Rev. A 2008, 78, 012115. [Google Scholar] [CrossRef] [Green Version]
- Rahi, S.J.; Emig, T.; Graham, N.; Jaffe, R.L.; Kardar, M. Scattering theory approach to electrodynamic Casimir forces. Phys. Rev. D 2009, 80, 085021. [Google Scholar] [CrossRef] [Green Version]
- Krüger, M.; Bimonte, G.; Emig, T.; Kardar, M. Trace formulas for nonequilibrium Casimir interactions, heat radiation, and heat transfer for arbitrary objects. Phys. Rev. B 2012, 86, 115423. [Google Scholar] [CrossRef] [Green Version]
- Emig, T.; Graham, N.; Jaffe, R.L.; Kardar, M. Casimir forces between compact objects: The scalar case. Phys. Rev. D 2008, 77, 025005. [Google Scholar] [CrossRef] [Green Version]
- Kenneth, O.; Klich, I. Opposites attract: A theorem about the Casimir force. Phys. Rev. Lett. 2006, 97, 160401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bimonte, G. Scattering approach to Casimir forces and radiative heat transfer for nanostructured surfaces out of thermal equilibrium. Phys. Rev. A 2009, 80, 042102. [Google Scholar] [CrossRef] [Green Version]
- Bimonte, G.; Emig, T. Exact Results for Classical Casimir Interactions: Dirichlet and Drude Model in the Sphere-Sphere and Sphere-Plane Geometry. Phys. Rev. Lett. 2012, 109, 160403. [Google Scholar] [CrossRef] [Green Version]
- Bimonte, G. Beyond-proximity-force-approximation Casimir force between two spheres at finite temperature. II. Plasma versus Drude modeling, grounded versus isolated spheres. Phys. Rev. D 2018, 98, 105004. [Google Scholar] [CrossRef] [Green Version]
- Kenneth, O.; Klich, I. Casimir forces in a T-operator approach. Phys. Rev. B 2008, 78, 014103. [Google Scholar] [CrossRef] [Green Version]
- Milton, K.A.; Parashar, P.; Wagner, J. Exact Results for Casimir Interactions between Dielectric Bodies: The Weak-Coupling or van der Waals Limit. Phys. Rev. Lett. 2008, 101, 160402. [Google Scholar] [CrossRef] [Green Version]
- Reid, M.T.H.; Rodriguez, A.W.; White, J.; Johnson, S.G. Efficient Computation of Casimir Interactions between Arbitrary 3D Objects. Phys. Rev. Lett. 2009, 103, 040401. [Google Scholar] [CrossRef]
- Golestanian, R. Casimir-Lifshitz interaction between dielectrics of arbitrary geometry: A dielectric contrast perturbation theory. Phys. Rev. A 2009, 80, 012519. [Google Scholar] [CrossRef] [Green Version]
- Ttira, C.C.; Fosco, C.D.; Losada, E.L. Non-superposition effects in the Dirichlet–Casimir effect. J. Phys. A 2010, 43, 235402. [Google Scholar] [CrossRef] [Green Version]
- Hartmann, M.; Ingold, G.-L.; Neto, P.A.M. Plasma versus Drude Modeling of the Casimir Force: Beyond the Proximity Force Approximation. Phys. Rev. Lett. 2017, 119, 043901. [Google Scholar] [CrossRef]
- Bordag, M.; Robaschik, D.; Wieczorek, E. Quantum field theoretic treatment of the Casimir effect. Ann. Phys. 1985, 165, 192. [Google Scholar] [CrossRef]
- Bordag, M. Casimir effect for a sphere and a cylinder in front of a plane and corrections to the proximity force theorem. Phys. Rev. D 2006, 73, 125018. [Google Scholar] [CrossRef] [Green Version]
- Emig, T.; Hanke, A.; Golestanian, R.; Kardar, M. Normal and lateral Casimir forces between deformed plates. Phys. Rev. A 2003, 67, 022114. [Google Scholar] [CrossRef] [Green Version]
- Büscher, R.; Emig, T. Towards a theory of molecular forces between deformed media. Nucl. Phys. B 2004, 696, 468. [Google Scholar]
- Teo, L. Material dependence of Casimir interaction between a sphere and a plate: First analytic correction beyond proximity force approximation. Phys. Rev. D 2013, 88, 045019. [Google Scholar] [CrossRef] [Green Version]
- Huth, O.; Rüting, F.; Biehs, S.; Holthaus, M. Shape-dependence of near-field heat transfer between a spheroidal nanoparticle and a flat surface. Eur. Phys. J. Appl. Phys. 2010, 50, 10603. [Google Scholar] [CrossRef] [Green Version]
- Incardone, R.; Emig, T.; Krüger, M. Heat transfer between anisotropic nanoparticles: Enhancement and switching. Europhys. Lett. 2014, 106, 41001. [Google Scholar] [CrossRef] [Green Version]
- Graham, N.; Shpunt, A.; Emig, T.; Rahi, S.J.; Jaffe, J.L.; Kardar, M. Electromagnetic Casimir forces of parabolic cylinder and knife-edge geometries. Phys. Rev. D 2011, 83, 125007. [Google Scholar] [CrossRef] [Green Version]
- Emig, T.; Graham, N. Electromagnetic Casimir energy of a disk opposite a plane. Phys. Rev. A 2016, 94, 032509. [Google Scholar] [CrossRef] [Green Version]
- Reid, H.M.T.; White, J.; Johnson, S.G. Fluctuating surface currents: An algorithm for efficient prediction of Casimir interactions among arbitrary materials in arbitrary geometries. Phys. Rev. A 2013, 88, 022514. [Google Scholar] [CrossRef] [Green Version]
- Harrington, R.F. Time-Harmonic Electromagnetic Fields; Wyley: New York, NY, USA, 2001. [Google Scholar]
- Lifshitz, E.M.; Pitaevskii, L.P. Statistical Physics: Part 2; Pergamon: Oxford, UK, 1980. [Google Scholar]
- Agarwal, G.S. Quantum electrodynamics in the presence of dielectrics and conductors. I. Electromagnetic field response functions and black-body fluctuations in finite geometries. Phys. Rev. A 1975, 11, 230–242. [Google Scholar] [CrossRef]
- Rytov, S.M.; Kravtsov, Y.A.; Tatarskii, V.I. Principles of Statistical Radiophysics; Springer: Berlin, Germany, 1989. [Google Scholar]
- Lifshitz, E.M. The theory of molecular attractive forces between solids. Sov. Phys. JETP 1956, 2, 73. [Google Scholar]
- Waterman, P.C. Symmetry, Unitarity, and Geometry in Electromagnetic Scattering. Phys. Rev. D 1971, 3, 825. [Google Scholar] [CrossRef]
- Landau, L.D.; Lifshitz, E.M. Electrodynamics of Continuous Media; Pergamon: Oxford, UK, 1984. [Google Scholar]
- Eckhardt, W. Macroscopic theory of electromagnetic fluctuations and stationary heat transfer. Phys. Rev. A 1984, 29, 1991–2003. [Google Scholar] [CrossRef]
- Harrington, R.F. Boundary integral formulations for homogeneous material bodies. J. Electr. Wav. Appl. 1989, 3, 1–15. [Google Scholar] [CrossRef]
Figure 1.
Configuration of bodies: (a) general shapes and positions that can be studied with the approaches presented in this work, (b) non-penetrating configurations that can be studied within the scattering approach.
Figure 1.
Configuration of bodies: (a) general shapes and positions that can be studied with the approaches presented in this work, (b) non-penetrating configurations that can be studied within the scattering approach.

Figure 2.
Matrix forming the diagonal blocks of the matrix N.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bimonte, G.; Emig, T. Unifying Theory for Casimir Forces: Bulk and Surface Formulations. Universe 2021, 7, 225. https://0-doi-org.brum.beds.ac.uk/10.3390/universe7070225
AMA Style
Bimonte G, Emig T. Unifying Theory for Casimir Forces: Bulk and Surface Formulations. Universe. 2021; 7(7):225. https://0-doi-org.brum.beds.ac.uk/10.3390/universe7070225
Chicago/Turabian StyleBimonte, Giuseppe, and Thorsten Emig. 2021. "Unifying Theory for Casimir Forces: Bulk and Surface Formulations" Universe 7, no. 7: 225. https://0-doi-org.brum.beds.ac.uk/10.3390/universe7070225
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.