Abandoned Farmland Location in Areas Affected by Rapid Urbanization Using Textural Characterization of High Resolution Aerial Imagery

Abstract
:1. Introduction
2. Data and Methodology
2.1. Research Approach
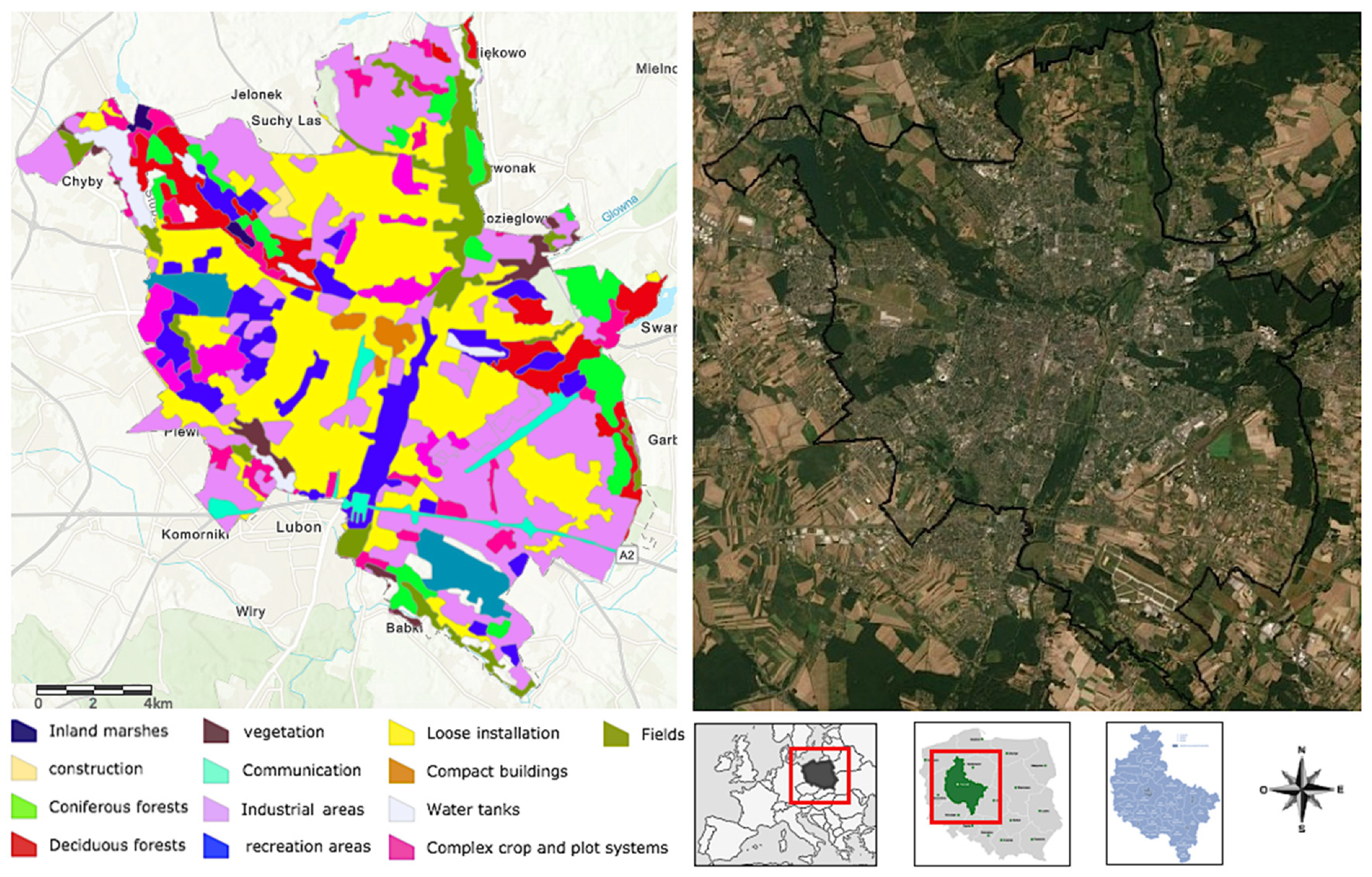
2.2. Study Area and Data
2.3. Abandoned Farmland Extraction Algorithm
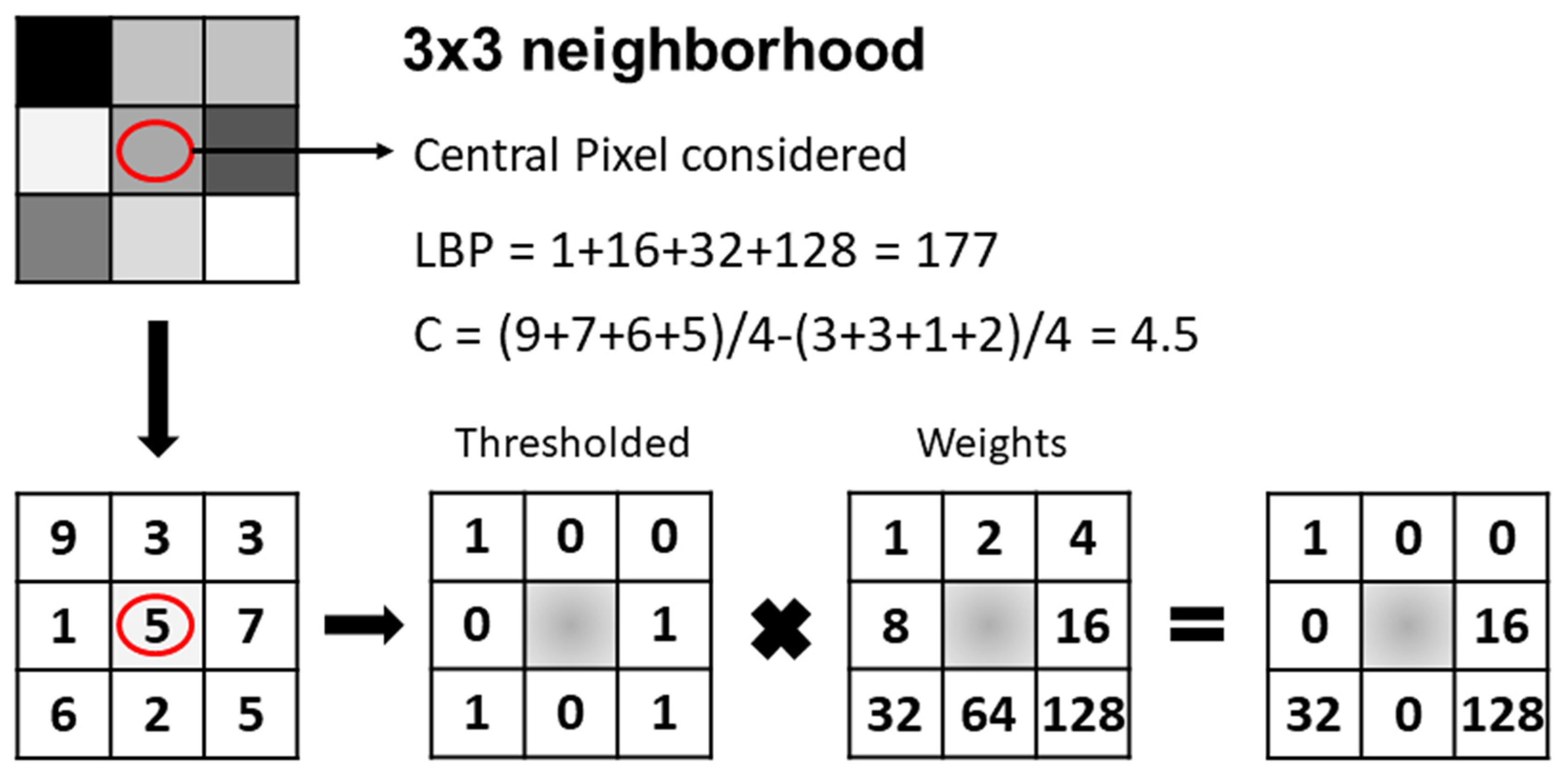
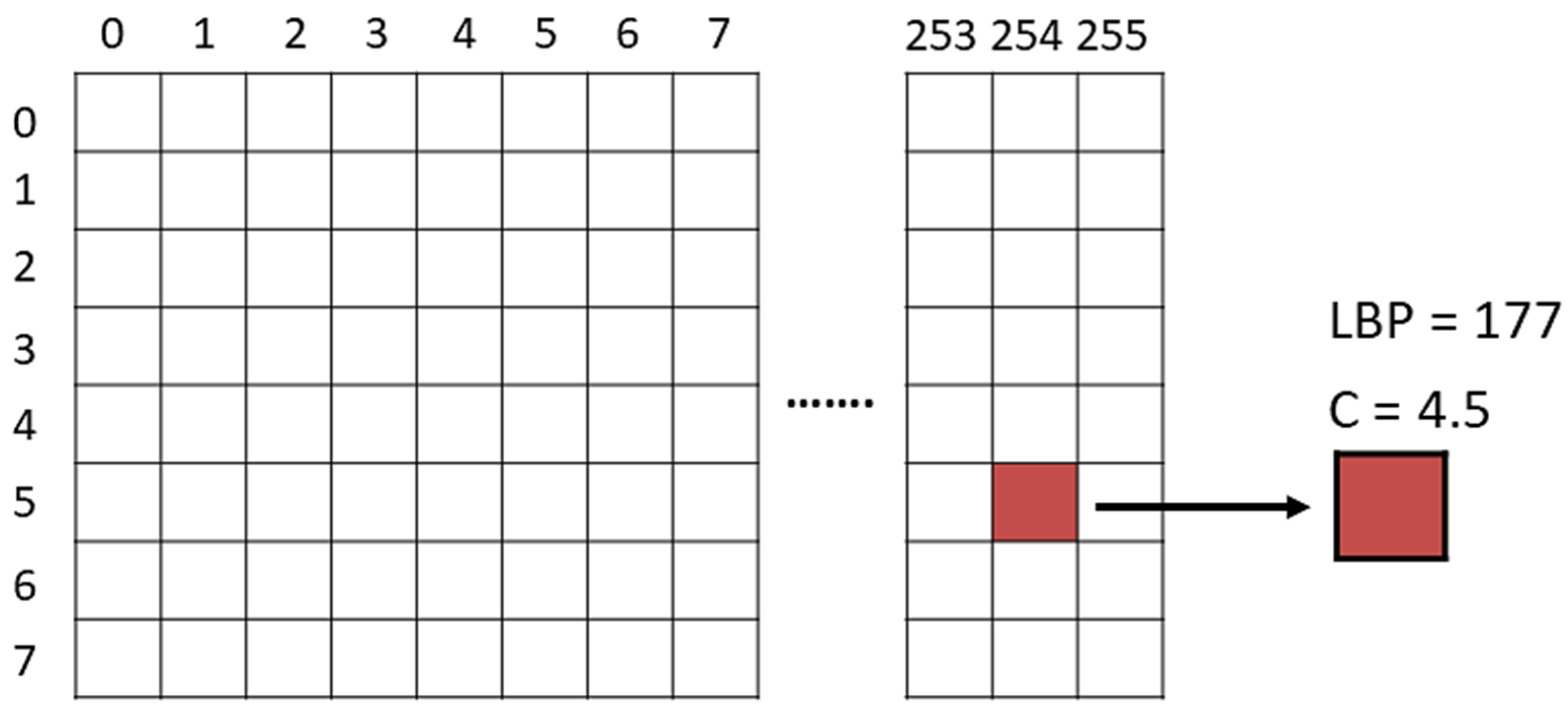
- Local binary pattern (LBP): LBP is a local texture descriptor capable of characterizing small texture regions [23]. LBP is a simple, yet very efficient texture operator that thresholds the neighboring pixels based on the value of the current pixel [24]. Due to its discriminative power, the LBP texture operator has become a popular approach in several applications, highlighting textural analysis procedures [25]. Figure 4 shows the procedure for computing LBP values. First, each central pixel is compared with its eight neighbors. This 3 × 3 neighborhood must be thresholded by the value of the center pixel; the neighbors having a smaller value than that of the central pixel will have bit 0, and the other neighbors having a value equal to or greater than that of the central pixel will have bit 1. Then these binary values of the pixels in the thresholded neighborhood must be multiplied by the weights given to the corresponding pixels. Finally, the values of the eight pixels will be added to obtain a number for this neighborhood. If we computed the LBP histogram over an entire region, it may be used for describing its texture. In addition, LBP achieves high levels of accuracy in textural characterization processes compared to other texture operators.
- A contrast measure (C): LBP descriptors efficiently capture the local spatial patterns. However, whereas LBP is invariant against any monotonic grey scale transformation, we must combine it with a simple contrast measure C to make it even more powerful. The computation of C is also addressed in Figure 4.
- (1)
- Texture characterization
- (2)
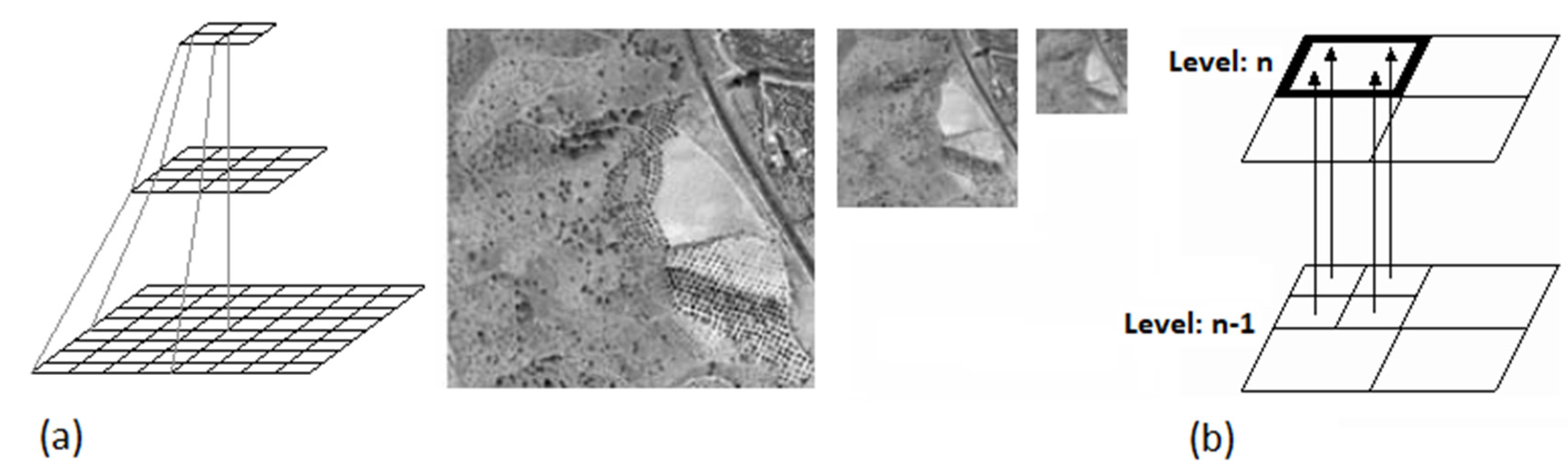
- Hierarchical structure generation
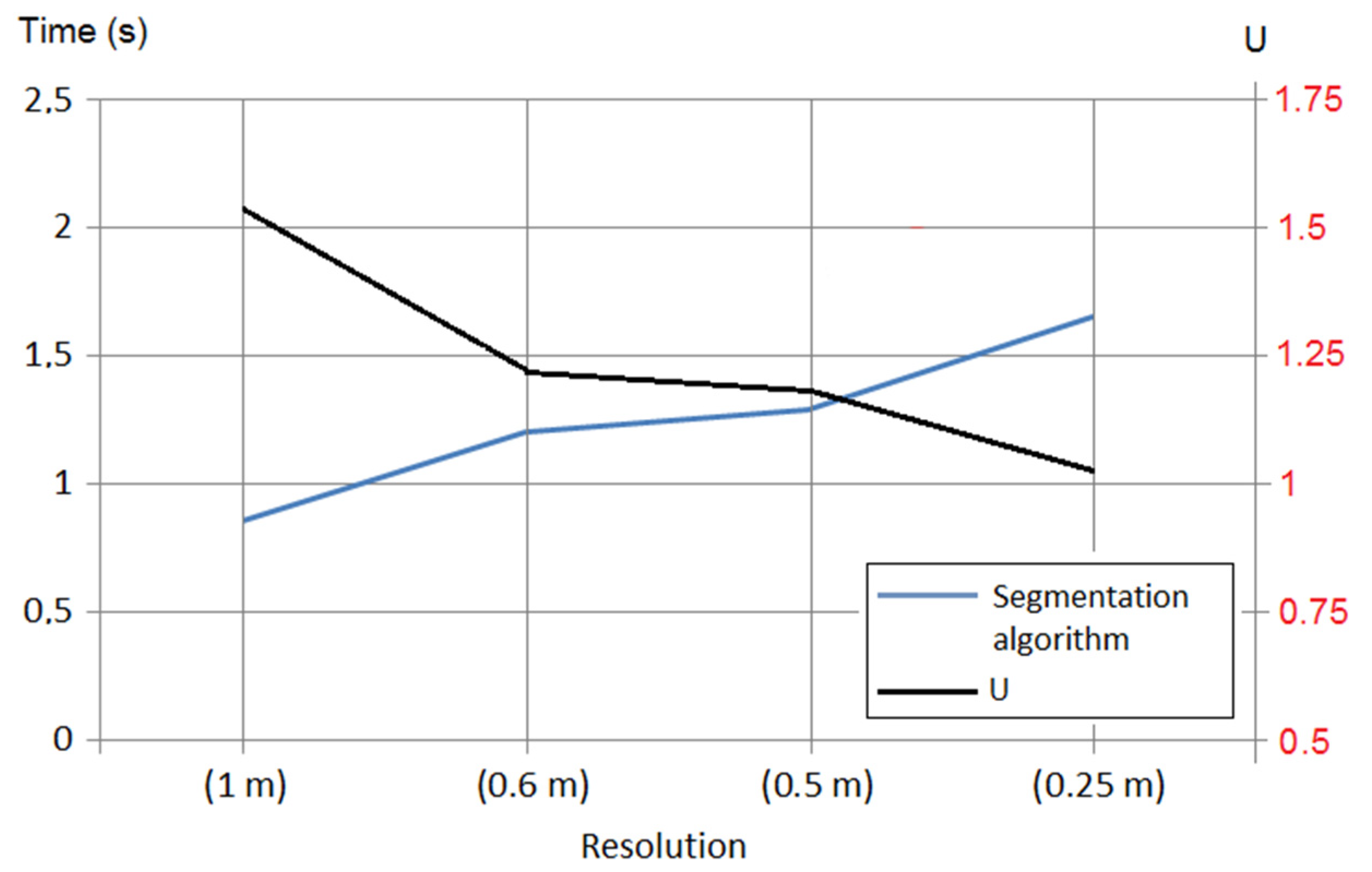
- Homogeneity, denoted by H(x, y, l). Homogeneity ranged from 1 (if the four cells immediately underneath had the same texture) to 0 (in any other case). The setting of H was based on a uniformity test. Thus, the four cells had the same texture if a measure of relative dissimilarity within that region was lower than a certain threshold U, (/ < U). U must be set in such a way as to ensure the detection and differentiation of textures, preventing wherever possible the inclusion of two regions with different textures in the same class. For this reason, it is advisable to choose a value for U as small as possible.
- Texture, denoted by T(x, y, l). The texture of one cell was calculated as the sum of the LBP/C distributions of the four cells immediately underneath if, and only if, the cell was homogeneous. Otherwise, the value of T(x, y, l) was set to a fixed value .
- Parent link, denoted by . If was equal to 1, the values of the parent links of the four cells immediately underneath were set to (x, y). Otherwise, these four parent links were set to a null value.
- The centroid, denoted by . , represents the center of mass of the base region associated with (x, y, l).
- Histogram. Each parent link stored the two-dimensional histogram, which characterized the texture of the image region represented by this node. In order to optimize the storage capacity and to improve the computation time, if a node (located at the l level) represented a region of homogenous texture, all the nodes located at lower levels (until the end of the pyramid) did not store their corresponding histograms, their texture being characterized by the histogram stored in the parent link.
- (3)
- Grow of homogeneous cells
- (4)
- Homogeneous cells fusion
- = null. Therefore, the cell had no parent.
- = null. Therefore, the cell had no parent.
- The cells had a homogeneous texture. = 1 & = 1.
- The cells had the same texture.
- (5)
- Pixel-wise
- (6)
- FLA zones’ extraction
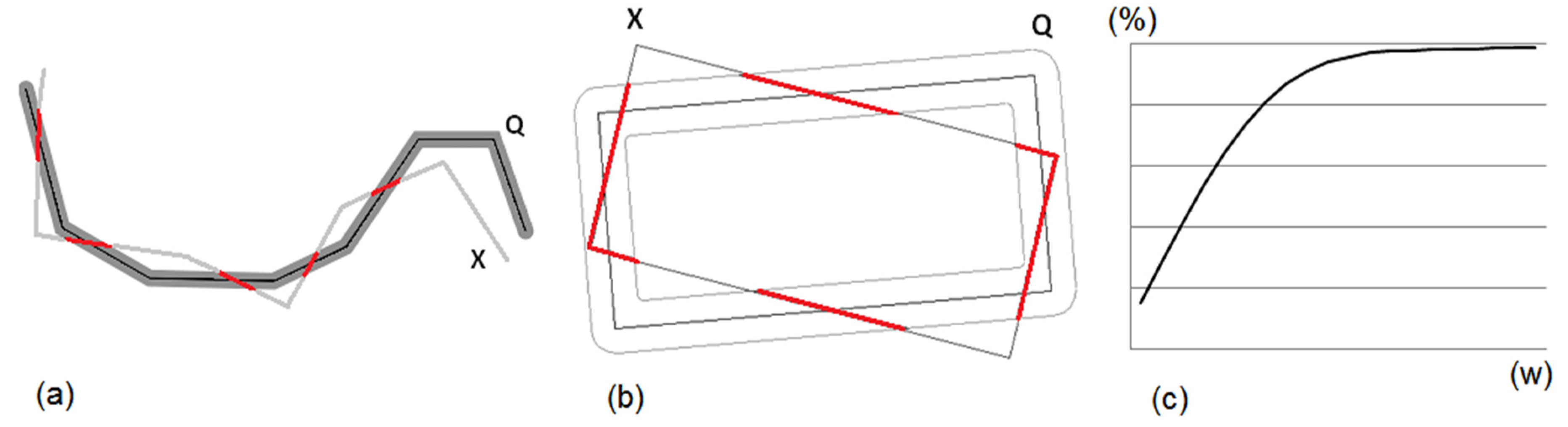
2.4. Evaluation of Segmentation Results
2.5. Evaluation of the Efficiency of Our Approach for Locating Abandoned Land
3. Results
3.1. Mapping Abandoned Farmland Derived From Textural Segmentation of the Aerial Image
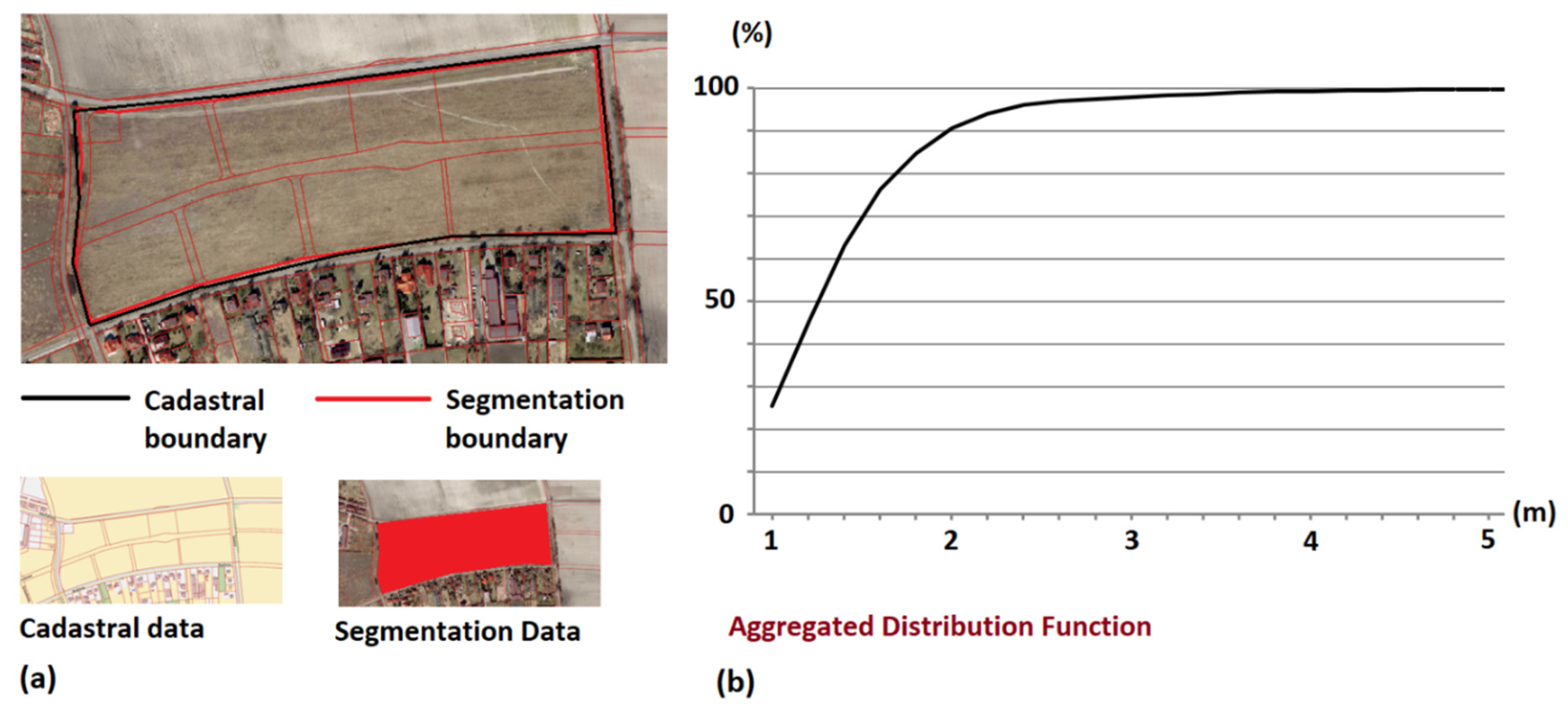
3.2. Evaluation of Segmentation Results
3.3. Evaluation of the Efficiency of Our Approach for Locating Abandoned Land
- The number of plots classified as abandoned land by means of the field visit procedure was 37, and the number of plots classified as “other uses” was three. Consequently, by means of this procedure, 92.5% of plots were classified as abandoned land.
- The number of plots classified as abandoned land by means of revision of the LBP/C parameters was 38, and the number of plots classified as “other uses” was two. Consequently, by means of this procedure, 95% of plots were classified as abandoned land.
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Pointereau, P.; Coulon, F.; Girard, P.; Lambotte, M.; Stuczynski, T.; Sanchez-Ortega, V.; Del Rio, A. Analysis of Farmland Abandonment and the Extent and Location of Agricultural Areas that are Actually Abandoned or are in Risk to be Abandoned; Anguiano, E., Bamps, C., Terres, J., Eds.; Institute for Environment and Sustainability, Joint Research Centre, European Commission: Luxembourg, 2008. [Google Scholar]
- Grădinaru, S.; Kienast, F.; Psomas, A. Using multi-seasonal Landsat imagery for rapid identification of abandoned land in areas affected by urban sprawl. Ecol. Indic. 2019, 96, 79–86. [Google Scholar] [CrossRef]
- Benayas, J.; Martins, A.; Nicolau, J.; Schulz, J. Abandonment of agricultural land: An overview of drivers and consequences. CAB Rev. Perspect. Agric. Vet. Sci. Nutr. Nat. Resour. 2007, 2, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Morán, N.; Hernández, V.; Zazo, A.; Simón, M. Multifuncionalidad, preservación y retos futuros de la agricultura peri-urbana en la Europa mediterránea. In Agricultura Urbana Integral, Ornamental y Alimentaria; Briz, J., De Felipe, I., Eds.; Ministerio de Agricultura, Alimentación y Medio Ambiente Press: Madrid, Spain, 2015; pp. 153–170. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.; Hall, R.; Coops, N.; Franklin, S. High spatial resolution remotely sensed data for ecosystem characterization. Bioscience 2004, 54, 511–521. [Google Scholar] [CrossRef] [Green Version]
- Huzui, A.; Abdelkader, A.; Pătru -Stupariu, I. Analysing urban dynamics using multi-temporal satellite images in the case of a mountain area, Sinaia (Romania). Int. J. Digit. Earth 2011, 6, 1–17. [Google Scholar]
- Kolecka, N.; Kozak, J.; Kaim, D.; Dobosz, M.; Ginzler, C.; Psomas, A. Mapping secondary forest succession on abandoned agricultural land with LiDAR point clouds and terrestrial photography. Remote Sens. 2015, 7, 8300–8322. [Google Scholar] [CrossRef] [Green Version]
- Grădinaru, S.; Lojă, C.; Onose, D.; Gavrilidis, A.; Pătru-Stupariu, I.; Kienast, F.; Hersperger, A. Land abandonment as precursor of built-up development at the sprawling periphery of former socialist cities. Ecol. Indic. 2015, 57, 305–313. [Google Scholar] [CrossRef]
- Estel, S.; Kuemmerle, T.; Alcántara, C.; Levers, C.; Prishchepov, A.; Hostert, P. Mapping farmland abandonment and recultivation across Europe using MODIS NDVI time series. Remote Sens. Environ. 2015, 163, 312–325. [Google Scholar] [CrossRef]
- Liu, N.; Harper, R.; Handcock, R.; Evans, B.; Sochacki, S.; Dell, B.; Walden, L.; Liu, S. Seasonal Timing for Estimating Carbon Mitigation in Revegetation of Abandoned Agricultural Land with High Spatial Resolution Remote Sensing. Remote Sens. 2017, 9, 545. [Google Scholar] [CrossRef] [Green Version]
- Stryjakiewicz, T.; Królewicz, S.; Ruiz-Lendinez, J.J.; Mickiewicz, B.; Motek, P. Abandoned agricultural land quantification in urban areas using high resolution satellite imagery. In Proceedings of the RSA Central and Eastern Europe Conference: Metropolises and Peripheries of CEE Countries: New Challenges for EU, National and Regional Policies, Lublin, Poland, 11–13 September 2019. [Google Scholar]
- Baumann, M.; Kuemmerle, T.; Elbakidze, M.; Ozdogan, M.; Radeloff, V.C.; Keuler, N.S.; Prishchepov, A.V.; Kruhlov, I.; Hostert, P. Patterns and drivers of post-socialist farmland abandonment in Western Ukraine. Land Use Policy 2011, 28, 552–562. [Google Scholar] [CrossRef]
- Prishchepov, A.; Radeloff, V.; Baumann, M.; Kuemmerle, T.; Muller, D. Effects of institutional changes on land use: Agricultural land abandonment during the transition from state-command to market-driven economies in post-Soviet Eastern Europe. Environ. Res. Lett. 2012, 7, 024021. [Google Scholar] [CrossRef]
- Prishchepov, A.; Radeloff, V.; Dubinin, M.; Alcantara, C. The effect of Landsat ETM/ETM + image acquisition dates on the detection of agricultural land abandonment in Eastern Europe. Remote Sens. Environ. 2012, 126, 195–209. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; El Hajj, M.; Zribi, M.; Minh, D.H.T.; Ndikumana, E.; Courault, D.; Belhouchette, H. Mapping Paddy Rice Using Sentinel-1 SAR Time Series in Camargue, France. Remote Sens. 2019, 11, 887. [Google Scholar] [CrossRef] [Green Version]
- Carrasco, L.; O’Neil, A.; Morton, R.; Rowland, C. Evaluating Combinations of Temporally Aggregated Sentinel-1, Sentinel-2 and Landsat 8 for Land Cover Mapping with Google Earth Engine. Remote Sens. 2019, 11, 288. [Google Scholar] [CrossRef] [Green Version]
- Ojala, T.; Pietikäinen, M. Unsupervised texture segmentation using feature distributions. Pattern Recognit. 1999, 32, 477–486. [Google Scholar] [CrossRef] [Green Version]
- Maenpaa, T.; Pietikäinen, M. Texture analysis with local binary patterns. In Handbook of Pattern Recognition and Computer Vision; Chen, C., Wang, P., Eds.; University of Massachusetts Dartmouth Press: Dartmouth, MA, USA, 2005; pp. 197–216. [Google Scholar] [CrossRef]
- Ruiz-Lendínez, J.J.; Rubio-Campos, T.J.; Ureña-Cámara, M.A. Automatic extraction of road intersections from images based on texture characterization. Surv. Rev. 2011, 43, 212–225. [Google Scholar] [CrossRef]
- Ruiz-Lendínez, J.J.; Maćkiewicz, B.; Motek, P.; Stryjakiewicz, T. Method for an automatic alignment of imagery and vector data applied to cadastral information in Poland. Surv. Rev. 2019, 51, 123–134. [Google Scholar] [CrossRef]
- Kuemmerle, T.; Muller, D.; Griffiths, P.; Rusu, M. Land use change in Southern Romania after the collapse of socialism. Reg. Environ. Change 2009, 9, 1–12. [Google Scholar] [CrossRef]
- World Imagery. Available online: http://goto.arcgisonline.com/maps/World_Imagery (accessed on 10 February 2020).
- Pietikäinen, M.; Zhao, G. Two decades of local binary patterns: A survey. In Advances in Independent Component Analysis and Learning Machines; Academic Press: Oxford, UK, 2015; pp. 175–210. [Google Scholar]
- Malhotra, A.; Sankaran, A.; Mittal, A.; Vatsa, M.; Singh, R. Fingerphoto Authentication Using Smartphone Camera Captured Under Varying Environmental Conditions. In Using Computer Vision, Pattern Recognition and Machine Learning Methods for Biometrics; Academic Press: Oxford, UK, 2017; pp. 119–144. [Google Scholar]
- Dornaika, F.; Moujahid, A.; El Merabet, Y.; Ruichek, Y. A Comparative Study of Image Segmentation Algorithms and Descriptors for Building Detection. In Handbook of Neural Computation; Academic Press: Oxford, UK, 2017; pp. 591–606. [Google Scholar]
- Sokal, R.; Rohlf, F. Introduction to Biostatistics; W.H. Freeman & Co. Ltd: Gordonsville, Virginia, USA, 1987. [Google Scholar]
- Marfil, R.; Molina-Tanco, L.; Bandera, A.; Rodríguez, J.; Sandoval, F. Pyramid segmentation algorithms revisited. Pattern Recognit. 2006, 39, 1430–1451. [Google Scholar] [CrossRef] [Green Version]
- Cho, K.; Meer, P. Image segmentation from consensus information. Comput. Vis. Image Underst. 1997, 68, 72–89. [Google Scholar] [CrossRef] [Green Version]
- Kropatsch, W.; Haxhimusa, Y. Grouping and segmentation in a hierarchy of graphs. In Computational Imaging II; SPIE Press; Digital Library: Bellingham, WA, USA, 2004; pp. 193–204. [Google Scholar]
- Bister, M.; Cornelis, J.; Rosenfeld, A. A critical view of pyramid segmentation algorithms. Pattern Recognit. Lett. 1990, 11, 605–617. [Google Scholar] [CrossRef]
- Jolion, J.M.; Montanvert, A. The adaptive pyramid, a framework for 2D image analysis. Comput. Vis. Image Underst. 1992, 55, 339–348. [Google Scholar] [CrossRef]
- Prewer, D.; Kitchen, L.J. Soft image segmentation by weighted linked pyramid. Pattern Recognit. Lett. 2001, 22, 123–132. [Google Scholar] [CrossRef]
- Ruiz-Lendínez, J.J.; Ariza-López, F.J.; Ureña-Cámara, M.A. Automatic positional accuracy assessment of geospatial databases using line-based methods. Surv. Rev. 2013, 45, 332–342. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Liu, J.; Yang, Y. Multi-resolution color image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 689–700. [Google Scholar]
- Chen, C.; Knoblock, C.; Shahabi, C. Automatically conflating road vector data with orthoimagery. Geoinformatica 2006, 10, 495–530. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Lendínez, J.J.; Ariza-López, F.J.; Ureña-Cámara, M.A. A polygon and point-based approach to matching geospatial features. ISPRS Int. J. Geo-Inf. 2017, 6, 399. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field visit | |||
|---|---|---|---|
| Abandoned Land | Other Uses | ||
| Revision of LBP/C parameters | Abandoned Land | 36 | 2 |
| Other uses | 1 | 1 | |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruiz-Lendínez, J.J. Abandoned Farmland Location in Areas Affected by Rapid Urbanization Using Textural Characterization of High Resolution Aerial Imagery. ISPRS Int. J. Geo-Inf. 2020, 9, 191. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9040191
Ruiz-Lendínez JJ. Abandoned Farmland Location in Areas Affected by Rapid Urbanization Using Textural Characterization of High Resolution Aerial Imagery. ISPRS International Journal of Geo-Information. 2020; 9(4):191. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9040191
Chicago/Turabian StyleRuiz-Lendínez, Juan José. 2020. "Abandoned Farmland Location in Areas Affected by Rapid Urbanization Using Textural Characterization of High Resolution Aerial Imagery" ISPRS International Journal of Geo-Information 9, no. 4: 191. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9040191