
Analysis of Crack Problems in Multilayered Elastic Medium by a Consecutive Stiffness Method
 ,
,
Abstract
:1. Introduction
2. Statement of Problem
3. Formulation of the Method
4. Results and Discussion
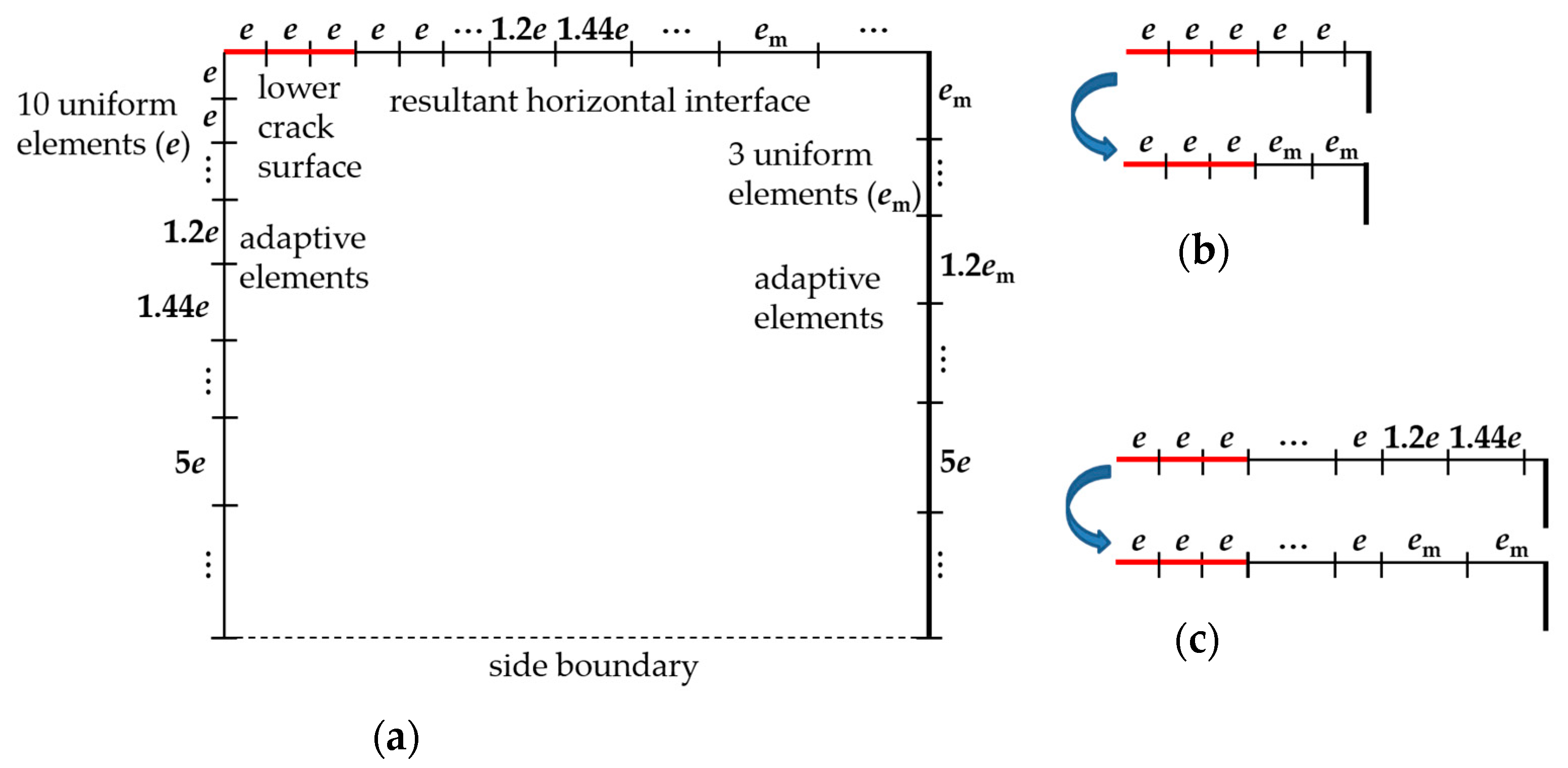
4.1. Discretization
4.2. Homogeneous Medium
4.3. Two Bonded Half Planes
4.4. General Multilayered Media
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Toroody, F.; Khalaj, S.; Leoni, L.; Carlo, F.; Bona, G.; Forcina, A. Reliability Estimation of Reinforced Slopes to Prioritize Maintenance Actions. Int. J. Environ. Res. Public Health 2021, 18, 373. [Google Scholar]
- Xiao, B.; Fang, J.; Long, G.; Tao, Y.; Huang, Z. Analysis of thermal conductivity of damaged tree-like bifurcation network withfractal roughened surfaces. Fractals 2022, 30, 2250104. [Google Scholar] [CrossRef]
- An, S.; Zou, H.; Li, W.; Deng, Z. Experimental investigation on the vibration attenuation of tensegrity prisms integrated with particle dampers. Acta Mech. Solida Sin. 2022, 35, 672–681. [Google Scholar] [CrossRef]
- Hamzah, K.; Long, N.; Senu, N.; Eshkuvatov, K. Numerical solution for crack phenomenon in dissimilar materials under various mechanical loadings. Symmetry 2021, 13, 235. [Google Scholar] [CrossRef]
- Xiao, B.; Wang, W.; Zhang, X.; Long, G.; Fan, J.; Chen, H.; Deng, L. A novel fractal solution for permeability and Kozeny-Carman constant of fibrous porous media made up of solid particles and porous fibers. Powder Technol. 2019, 349, 92–98. [Google Scholar] [CrossRef]
- Liang, M.; Liu, Y.; Xiao, B.; Yang, S.; Wang, Z. An analytical model for the transverse permeability of gas diffusion layer with electrical double layer effects in proton exchange membrane fuel cells. Int. J. Hydrog. Energ 2018, 43, 17880–17888. [Google Scholar] [CrossRef]
- Xiao, B.; Li, Y.; Long, G. A fractal model of power-law fluid through charged fibrous porous media by using the fractional-derivative theory. Fractals 2022, 30, 2250072. [Google Scholar] [CrossRef]
- Cantini, A.; Leoni, L.; Carlo, F.; Salvio, M.; Martini, C.; Martini, F. Technological Energy Efficiency Improvements in Cement Industries. Sustainability 2021, 13, 3810. [Google Scholar] [CrossRef]
- Liang, M.; Fu, C.; Xiao, B.; Luo, L.; Wang, Z. A fractal study for the effective electrolyte diffusion through charged porous media. Int. J. Heat Mass Transf. 2019, 137, 365–371. [Google Scholar] [CrossRef]
- Cheng, W.; Lu, C.; Feng, G.; Xiao, B. Ball sealer tracking and seating of temporary plugging fracturing technology in the perforated casing of a horizontal well. Energy Explor. Exploit. 2021, 39, 2045–2061. [Google Scholar] [CrossRef]
- Adachi, J.; Siebrits, E.; Peirce, A.; Desroches, J. Computer simulation of hydraulic fractures. Int. J. Rock Mech. Min. Sci. 2007, 44, 739–757. [Google Scholar] [CrossRef]
- Long, G.; Liu, S.; Xu, G.; Wong, S.; Chen, H.; Xiao, B. A perforation-erosion model for hydraulic-fracturing applications. SPE Prod. Oper. 2018, 33, 770–783. [Google Scholar] [CrossRef]
- Cheng, W.; Lu, C.; Xiao, B. Perforation optimization of intensive-stage fracturing in a horizontal well using a coupled 3D-DDM fracture model. Energies 2021, 14, 2393. [Google Scholar] [CrossRef]
- Cui, C.; Zhang, Q.; Banerjee, U.; Babuška, I. Stable generalized finite element method (SGFEM) for three-dimensional crack problems. Numer. Math. 2022, 152, 475–509. [Google Scholar] [CrossRef]
- Liu, S.; Valko, P. A rigorous hydraulic-fracture equilibrium-height model for multilayer formations. SPE Prod. Oper. 2018, 33, 214–234. [Google Scholar] [CrossRef]
- Peirce, A.; Siebrits, E. The scaled flexibility matrix method for the efficient solution of boundary value problems in 2D and 3D layered elastic media. Comput. Methods Appl. Mech. Eng. 2001, 190, 5935–5956. [Google Scholar] [CrossRef]
- Liu, S.; Valko, P.; McKetta, S.; Liu, X. Microseismic closure window characterizes hydraulic-fracture geometry better. SPE Reserv. Eval. Eng. 2017, 20, 423–445. [Google Scholar] [CrossRef]
- Long, G.; Xu, G. The effects of perforation erosion on practical hydraulic-fracturing applications. SPE J. 2017, 22, 645–659. [Google Scholar] [CrossRef]
- Cheng, W.; Jin, Y.; Chen, M.; Jiang, G. Numerical stress analysis for the multi-casing structure inside a wellbore in the formation using the boundary element method. Pet. Sci. 2017, 14, 126–137. [Google Scholar] [CrossRef] [Green Version]
- Long, G.; Xu, G. A combined boundary integral method for analysis of crack problems in multilayered elastic media. Int. J. Appl. Mech. 2016, 8, 1650070. [Google Scholar] [CrossRef]
- Cheng, W.; Jiang, G.; Xie, J.; Wei, Z.; Zhou, Z.; Li, X. A simulation study comparing the Texas two-step and the multistage consecutive fracturing method. Pet. Sci. 2019, 16, 1121–1133. [Google Scholar] [CrossRef]
- Blandford, G.; Ingraffea, A.; Liggett, J. Two-dimensional stress intensity factor computations using the boundary element method. Int. J. Numer. Methods Eng. 1981, 17, 387–404. [Google Scholar] [CrossRef]
- Peirce, A.; Siebrits, E. Uniform asymptotic approximations for accurate modeling of cracks in layered elastic media. Int. J. Fract. 2001, 110, 205–239. [Google Scholar] [CrossRef]
- Thompson, W. Transmission of elastic waves through a stratified medium. J. Appl. Phys. 1950, 21, 89–93. [Google Scholar] [CrossRef]
- Gilbert, F.; Backus, G. Propagator matrices in elastic wave and vibration problems. Geophysics 1966, 31, 326–332. [Google Scholar] [CrossRef]
- Buffler, H. Theory of elasticity of a multilayered medium. J. Elast. 1971, 1, 125–143. [Google Scholar] [CrossRef]
- Benitez, F.; Rosakis, A. Three-dimensional elastostatics of a layer and a layered medium. J. Elast. 1987, 18, 3–50. [Google Scholar] [CrossRef]
- Shou, K.; Napier, J. A two-dimensional linear variation displacement discontinuity method for three-layered elastic media. Int. J. Rock Mech. Min. Sci. 1999, 36, 719–729. [Google Scholar] [CrossRef]
- Shou, K. A superposition scheme to obtain fundamental boundary element solutions in multi-layered elastic media. Int. J. Numer. Anal. Methods Geomech. 2000, 24, 795–814. [Google Scholar] [CrossRef]
- Crouch, S. Solution of plane elasticity problems by the displacement discontinuity method. Int. J. Numer. Methods Eng. 1976, 10, 301–343. [Google Scholar] [CrossRef]
- Asaro, R.; Lubarda, V. Mechanics of Solids and Materials; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Siebrits, E.; Crouch, S. On the paper ‘A two-dimensional linear variation displacement discontinuity method for three-layered elastic media’ by Keh-Jian Shou and J.A.L. Napier, International Journal of Rock Mechanics and Mining Sciences, Vol. 36(6), 719–729, 1999. Int. J. Rock Mech. Min. Sci. 2000, 37, 873–875. [Google Scholar] [CrossRef]
- Shou, K.; Napier, J. Author’s reply to discussion by E. Siebrits and S. L. Crouch regarding the paper ‘A two-dimensional linear variation displacement discontinuity method for three-layered elastic media’, Keh-Jian Shou and J.A.L. Napier, International Journal of Rock Mechanics and Mining Sciences, Vol. 36, 719–729, 1999. Int. J. Rock Mech. Min. Sci. 2000, 37, 877–878. [Google Scholar]
- Crouch, S.; Starfield, A. Boundary Element Methods in Solid Mechanics; George Allen & Unwein: London, UK, 1983. [Google Scholar]
- Zheng, R.; Deng, Z. External circular crack problem in magneto–electro-elasticity: Shear mode. Eng. Fract. Mech. 2022, 266, 108374. [Google Scholar] [CrossRef]
- Maier, G.; Novati, G. On boundary element-transfer matrix analysis of layered elastic systems. Eng. Anal. 1986, 3, 208–216. [Google Scholar] [CrossRef]
- Maier, G.; Novati, G. Boundary element elastic analysis of layered soils by a successive stiffness method. Int. J. Numer. Anal. Methods Geomech. 1987, 11, 435–447. [Google Scholar] [CrossRef]
- Xiao, B.; Huang, Q.; Chen, H.; Chen, X.; Long, G. A fractal model for capillary flow through a single tortuous capillary with roughened surfaces in fibrous porous media. Fractals 2021, 29, 2150017. [Google Scholar] [CrossRef]
- Zhang, Q.; Cui, C.; Banerjee, U.; Babuška, I. A condensed generalized finite element method (CGFEM) for interface problems. Comput. Methods Appl. Mech. Eng. 2022, 391, 114537. [Google Scholar] [CrossRef]
- Erdogan, F.; Biricikoglu, V. Two bonded half planes with a crack going through the interface. Int. J. Eng. Sci. 1973, 11, 745–766. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Duration for 3 Layers (s) | Duration for 5 Layers (s) |
|---|---|---|
| CSM | 58 | 101 |
| DM | 194 | 406 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, G.; Liu, Y.; Xu, W.; Zhou, P.; Zhou, J.; Xu, G.; Xiao, B. Analysis of Crack Problems in Multilayered Elastic Medium by a Consecutive Stiffness Method. Mathematics 2022, 10, 4403. https://0-doi-org.brum.beds.ac.uk/10.3390/math10234403
Long G, Liu Y, Xu W, Zhou P, Zhou J, Xu G, Xiao B. Analysis of Crack Problems in Multilayered Elastic Medium by a Consecutive Stiffness Method. Mathematics. 2022; 10(23):4403. https://0-doi-org.brum.beds.ac.uk/10.3390/math10234403
Chicago/Turabian StyleLong, Gongbo, Yingjie Liu, Wanrong Xu, Peng Zhou, Jiaqi Zhou, Guanshui Xu, and Boqi Xiao. 2022. "Analysis of Crack Problems in Multilayered Elastic Medium by a Consecutive Stiffness Method" Mathematics 10, no. 23: 4403. https://0-doi-org.brum.beds.ac.uk/10.3390/math10234403