
Memetic Algorithm with Isomorphic Transcoding for UAV Deployment Optimization in Energy-Efficient AIoT Data Collection
Jiangsu Key Laboratory of Media Design and Software Technology, School of Artificial Intelligence and Computer Science, Jiangnan University, Wuxi 214122, China
*
Author to whom correspondence should be addressed.
Mathematics 2022, 10(24), 4668; https://0-doi-org.brum.beds.ac.uk/10.3390/math10244668
Submission received: 8 November 2022
/
Revised: 5 December 2022
/
Accepted: 7 December 2022
/
Published: 9 December 2022
(This article belongs to the Special Issue Recent Advances in Computational Intelligence and Its Applications)
Abstract
:Unmanned aerial vehicles (UAVs) are one of the devices used to collect big data as part of the artificial intelligence of things (AIoT). To reduce total energy consumption, most researchers focus on optimizing the number and the location of UAVs, but ignore the distribution of UAVs in relation to the AIoT devices. Therefore, this paper proposes a memetic algorithm based on isomorphic transcoding space (MA-IT) to optimize the deployment of UAVs, solving, in particular, the distribution of UAVs in energy-efficient AIoT data collection. First, a simplified encoding method is designed to reduce the search space. This method only uses the distribution to represent a solution, and the number and the location of UAVs can be greedily deduced through the distribution. Afterwards, a pseudo-random initialization is proposed to initialize a population randomly and greedily. Then, an isomorphic transcoding (isoTcode) method is proposed to identify solutions with the isomorphic relations and to represent these solutions in a practical way in the UAV deployment problem. Finally, a crossover and a local search based on the isoTcode method are proposed to increase the solution diversity and improve the solution quality. Comparative experiments are conducted in the randomly generated instances with three problem scales. The results show that MA-IT performs better than other algorithms for solving the deployment optimization of UAVs.
1. Introduction
The development of artificial intelligence of things (AIoT) [1], combining artificial intelligence (AI) technology and the internet of things (IoT) technology, has become the main part of the internet of everything. At present, AIoT plays a significant role in the development of intelligent industries such as industrial robots, healthcare, unmanned driving, intelligent companionship, smart buildings, and smart cities [2,3,4,5,6]. However, in the data-transfer process, AIoT devices may fail to send all the data to the server due to power constraints, and a large amount of valuable data will be lost as information is growing rapidly. Hence, efficient data collection from all devices has become the top issue in AIoT development.
Nowadays, UAVs are widely used to collect a variety of data because of their flexibility, since the changes in the buildings, infrastructure, and topography make no difference to UAVs [7,8,9,10]. Specifically, UAV-assisted data collection uses a UAV as a small base station to receive data from devices [11]. To improve the service quality during the data collection, researchers have extensively studied the minimization of the energy consumption to obtain the optimal deployment of UAVs. Firstly, with the specified number of UAVs, the optimal traveling route of UAVs is obtained to minimize the energy consumption. Zeng et al. [12] proposed a path discretization method to minimize the energy consumption by optimizing the UAV trajectory, the communication time allocation, and the total mission completion time. Zhan et al. [13] designed an efficient iterative algorithm applying the successive convex optimization technique to obtain the optimal trajectory of UAVs for minimizing the energy consumption. Secondly, the optimal coverage of the specified area or devices is obtained with the number of minimum UAVs to minimize the energy consumption. Alzenad et al. [14] modeled the UAV deployment problem as a circle placement problem and a smallest enclosing circle problem, and proposed an optimal placement algorithm to use the minimum number of UAVs for covering as many devices as possible. Thirdly, the optimal deployment of UAVs is obtained to optimize the location, number, and distribution for minimizing the energy consumption.
This paper focuses on this last type of problem. However, most studies research the number and the location of the UAVs but not the distribution. For example, Huang et al. [15] optimized the location and the number of UAVs by a differential evolution (DE) with variable population size. Han et al. [16] optimized the deployment and flight trajectory of UAVs to minimize the energy consumption by an improved dandelion algorithm with a novel encoding strategy. Dong et al. [17] proposed an adaptive whale optimization algorithm to optimize the deployment of UAVs, and designed an elastic ring self-organizing map to optimize the trajectory of UAVs. In these works, the distribution between devices and UAVs was obtained by the greedy method that all devices select the nearest UAV to transmit information, but the greedy method has its limitations and usually cannot obtain the global optimum. Moreover, in the application of directional antennae, the distribution of UAVs has a much greater impact on the energy consumption than the location of UAVs within a certain range (especially for the horizontal position of UAVs), and the optimization of the distribution can effectively reduce energy consumption via reducing the overall runtime of UAVs [18]. Hence, this paper mainly focuses on optimizing the distribution of UAVs and deduces the number and the location correspondingly, instead of optimizing the location and the number of UAVs and determining the distribution greedily.
The main difficulty in solving the deployment of UAVs is to propose an effective algorithm with the problem-related knowledge to effectively minimize the whole energy consumption. In order to solve this difficulty, this paper proposes an efficient memetic algorithm [19] with isomorphic transcoding (MA-IT) for solving the UAV deployment optimization in energy-efficient AIoT data collection, which is based on the global and local search with problem-related knowledge. Firstly, a simplified encoding method is designed to use the distribution of UAVs to represent a solution, and the number and the location of UAVs can be deduced from the distribution. In addition, a pseudo-random initialization is used to randomly and greedily generate the initial population. During the evolutionary iteration of the algorithm, an isomorphic transcoding (isoTcode) method is always used to standardize the encoding of solutions with the isomorphic relations and prepare for crossover and local search. Then, a crossover based on the isoTcode method (Crossover_isoT) is used to generate diverse solutions. Afterwards, a local search based on the isoTcode method (LS_isoT) is used to improve the solution quality and speed up the convergence of the algorithm. In summary, the main novelties and advantages of the MA-IT algorithm are summarized as follows:
- (1)
- A simplified encoding method is designed to reduce the solution space, since only the distribution of UAVs is used to represent a complete solution. The number and the location of UAVs can be calculated from the distribution. For example, the solution x1 = {1, 2, 1} represents that UAV 1 is connected to the 1st and the 3rd devices, and UAV 2 is connected to the 2nd device. The number of the used UAVs is two (including UAV 1 and UAV 2), and the location of UAVs is the Fermat point of their connected devices.
- (2)
- A pseudo-random initialization is designed to randomly and greedily initialize the population. Since the number of used UAVs has an important influence of the energy consumption (i.e., more UAVs usually leads to more energy consumption), the initial population will randomly select UAVs and use UAVs as little as possible.
- (3)
- The isoTcode method is designed to distinguish solutions with isomorphic relations and represent the practical meaning of solutions. For example, since there is no difference among UAVs, the solution x1 = {1, 2, 1} and the solution x2 = {2, 1, 2} both represent that the 1st and the 3rd devices are connected to the same UAV and the 2nd device is connected to the other UAV. Therefore, x1 and x2 are isomorphic, and they should be mapped to the same solution after being transcoded. However, for the solution x3 = {1, 1, 2, 1} and the solution x4 = {1, 1, 2, 2}, although UAV 1 and UAV 2 are both used in the two solutions, their connections are different, and the index number of UAVs of them should be different after being transcoded.
- (4)
- Crossover_isoT and LS_isoT are designed with the problem-related knowledge to generate feasible solutions and speed up the convergence of the algorithm. The Crossover_isoT operator is conducted on two random solutions after isoTcode, and generates new feasible solutions based on the two parent solutions. The LS_isoT operator will merge two UAVs or reassign the distribution of the two UAVs with a probability when a solution satisfies the condition.
The rest of this paper is organized as follows: Section 2 introduces the problem model of the UAV deployment optimization in energy-efficient AIoT data collection. Section 3 describes the proposed MA-IT in detail. Section 4 presents the experimental results and the exhaustive discussion. Finally, Section 5 concludes this paper.
2. Problem Model
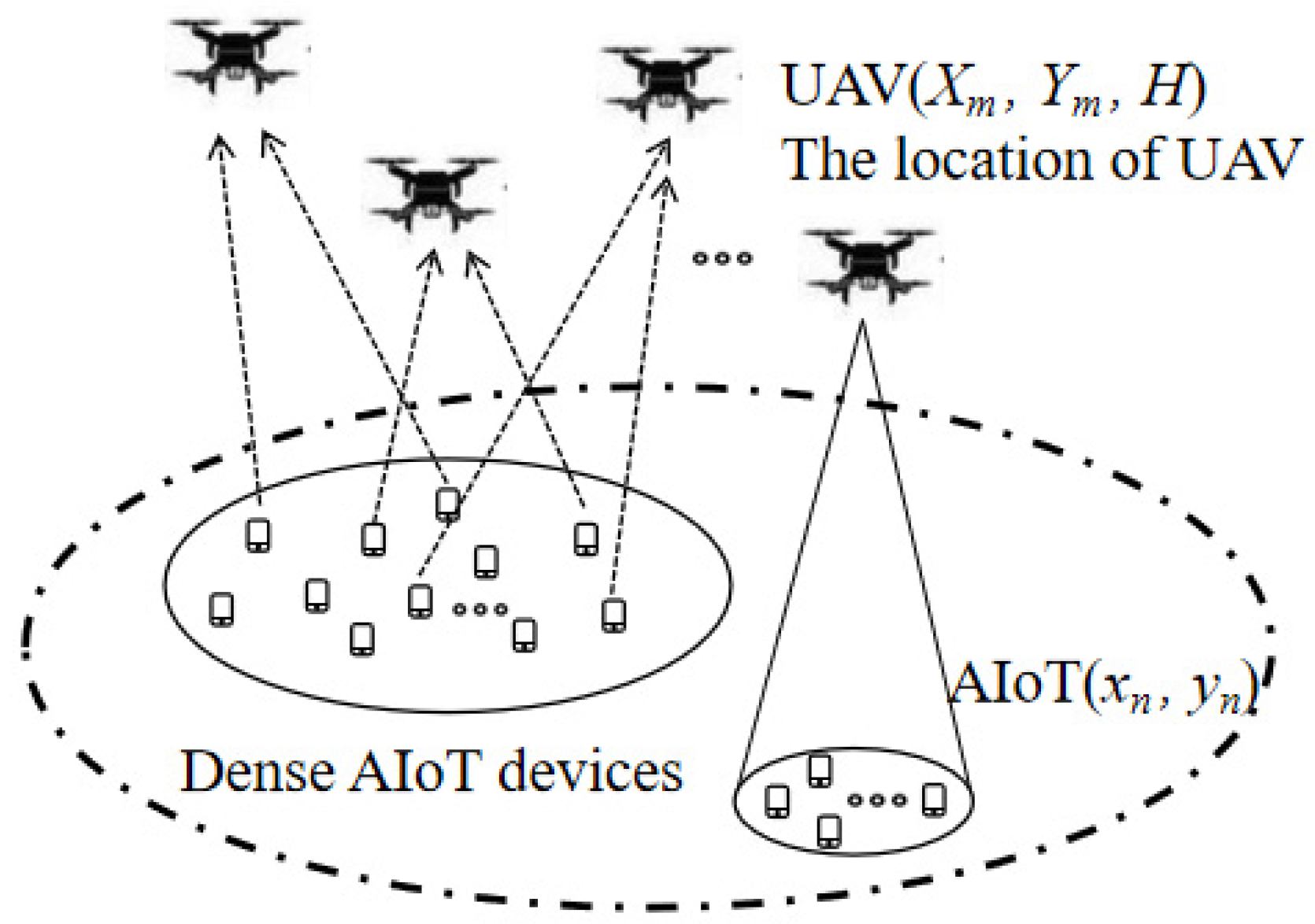
This section provides a detailed description of the problem model. As shown in Figure 1, two types of members called UAV and AIoT devices are used. Within the specified range, a set of N AIoT devices, denoted as AIoTn (n ∈ {1, 2, ..., N}), are served by the set of M UAVs that can be denoted as UAVm (m ∈ {1, 2, ..., M}). An AIoT device can be connected to only one UAV, but a UAV can connect to Upper_Limit AIoT devices, where Upper_Limit is the maximum number of connections. There are three decisive factors in the UAV deployment optimization problem: the location of UAVs, the number of UAVs, and the distribution between UAVs and AIoT devices. In this paper, the deployment of UAVs is determined to reduce the energy consumption by optimizing the distribution of UAVs. As mentioned in the Introduction, the number of UAVs can be calculated by their distributions, and the location of UAVs can be determined by the Fermat point of the connected AIoT devices [20].
The connection relationship Connn,m of the nth AIoT device and the mth UAV can be expressed as:
where 1 represents that they are connected, 0 represents that they are not connected, and N and M represent the number of AIoT devices and UAVs, respectively.
Each AIoT device can only connect with one UAV, which ensures the AIoT device can only send data to the UAV:
Moreover, it also requires that the number of connections of a UAV cannot exceed the maximum limit Upper_Limit:
In addition, the coordinate of AIoT devices is set as Device = {(x1, y1), (x2, y2), …, (xN, yN)}. The coordinate of UAVs can be denoted as UAV = {(X1, Y1), (X2, Y2), …, (XM, YM)}, which can be obtained by the Fermat point of the connected AIoT devices in this paper. The height of UAVs is set as H, since it is assumed that UAVs fly at the same height. Therefore, the distance disn,m between the nth AIoT device and the mth UAV can be calculated as follows:
where β is the coefficient of the directional antenna.
The transmitting rate rn,m between the mth UAV and the nth AIoT device is determined by the following formula [21]:
where B is the channel bandwidth, pTrans is the transmitting power between a UAV and an AIoT device, pChan denotes the channel power gained from a UAV to an AIoT device, and pNoise is the noise power.
Let Dn denote as the data quantity of the nth AIoT device which needs to be transmitted to the UAV. The work time tAIoTn of the nth AIoT device can be calculated as follows [22]:
The work time tUAVm of the mth UAV can be obtained by the longest work time of all the connected AIoTs devices:
The energy consumption of all the UAVs (including the carried receiver) EUAV and the AIoT devices EAIoT can be calculated as, respectively:
where pUAV denotes the hover power of a UAV, pREC denotes the power of the receiver taken by a UAV, and pAIoT denotes the power of an AIoT device.
The objective of this model is to minimize the whole energy consumption of the model Emodel with the unit of Joule (J), and can be formulated as:
In addition, the constraint of this model mainly consists of the connection limit among the UAVs and the AIoT devices, including Formulae (1)–(3). For better understanding, all the mathematical notations in the problem model are summarized in Table A1 in Appendix A.
3. Proposed MA-IT Algorithm
This section describes the proposed MA-IT algorithm in detail. The general framework of MA-IT is presented first, and then each component of this algorithm is introduced, including the simplified encoding method, the pseudo-random initialization, isoTcode, Crossover_isoT, and LS_isoT.
3.1. The General Framework of MA-IT
The general framework of MA-IT is presented in Algorithm 1. At the beginning of the algorithm, the population pop is initialized according to the simplified encoding method and Algorithm 2, and the fitness value is calculated for each solution in the initialized population. During the evolutionary process, an isoTcode method (Algorithm 3) is used in line 5 to transcode the solutions with the isomorphic relations and prepare for Crossover_isoT and LS_isoT. Then, after selecting the parent selections parent from pop, new solutions offspring are generated by the Crossover_isoT and LS_isoT operators according to Algorithm 4 and Algorithm 5, respectively. Afterwards, the fitness values of the new population offspring are calculated, and the population pop is updated which consists of the top half of the old population and the new population. The iterative process will continue until the fitness evaluation is out of the maximum range. It should be noted that all the solutions generated during the algorithm are feasible.
| Algorithm 1: MA-IT |
| Input:N: the number of AIoT devices; MaxFEs: the maximum number of the fitness evaluation; NP: the size of the population Output: the optimal solution
|
3.2. Simplified Encoding Method
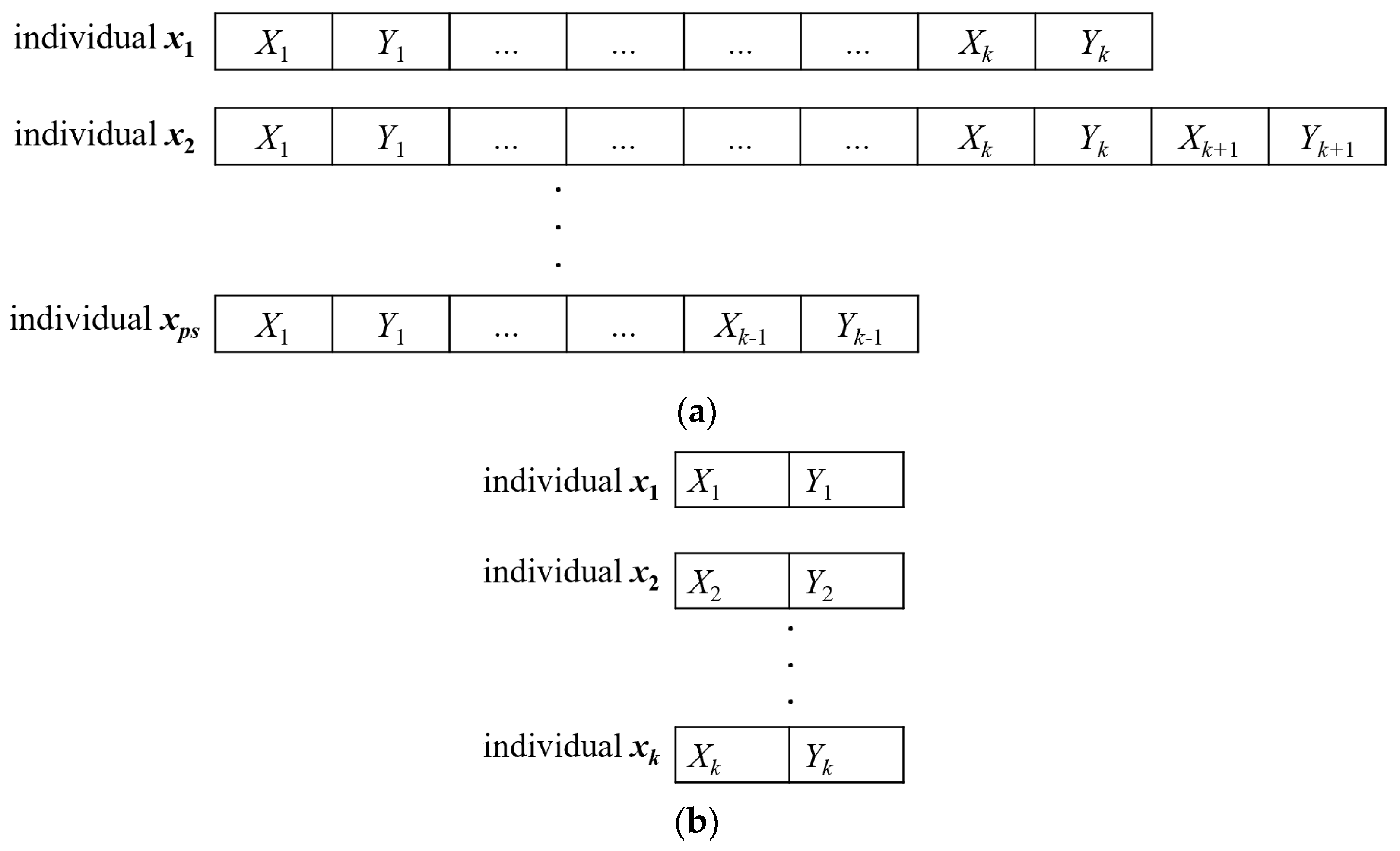
The simplified encoding method represents a solution using only the distribution of UAVs, and the number and the location of UAVs can be deduced from the distribution. The existing methods using only the location as a solution are restrictive, because the most important information, the distributions between the AIoT devices and the UAVs, are determined by a greedy method [15,26]. For example, in Figure 2, the locations of UAVs are used as a solution in two different encoding methods, where X and Y represent the x-axis and y-axis of UAVs, respectively. In the encoding method in Figure 2a, different solutions (individuals) have different lengths, and the length of a solution is equal to the number of the used UAVs, which limits the information exchange during the crossover operator and requires specific rules to implement crossover and mutation [26,27]. In the encoding method in Figure 2b, an individual includes the location of only a UAV, which can help to add or delete a UAV (an individual) easily. However, in this way, the whole population only represents a complete solution, which limits the solution diversity [15]. In addition, in these existing works, the distribution between the devices and the UAVs is obtained by the greedy method that the device chooses the nearest UAVs to send data. Therefore, this paper illustrates a simplified encoding method that only uses the distribution of UAVs to represent a solution (an individual), as shown in Figure 3. The number and the location of UAVs can be calculated from the distribution.
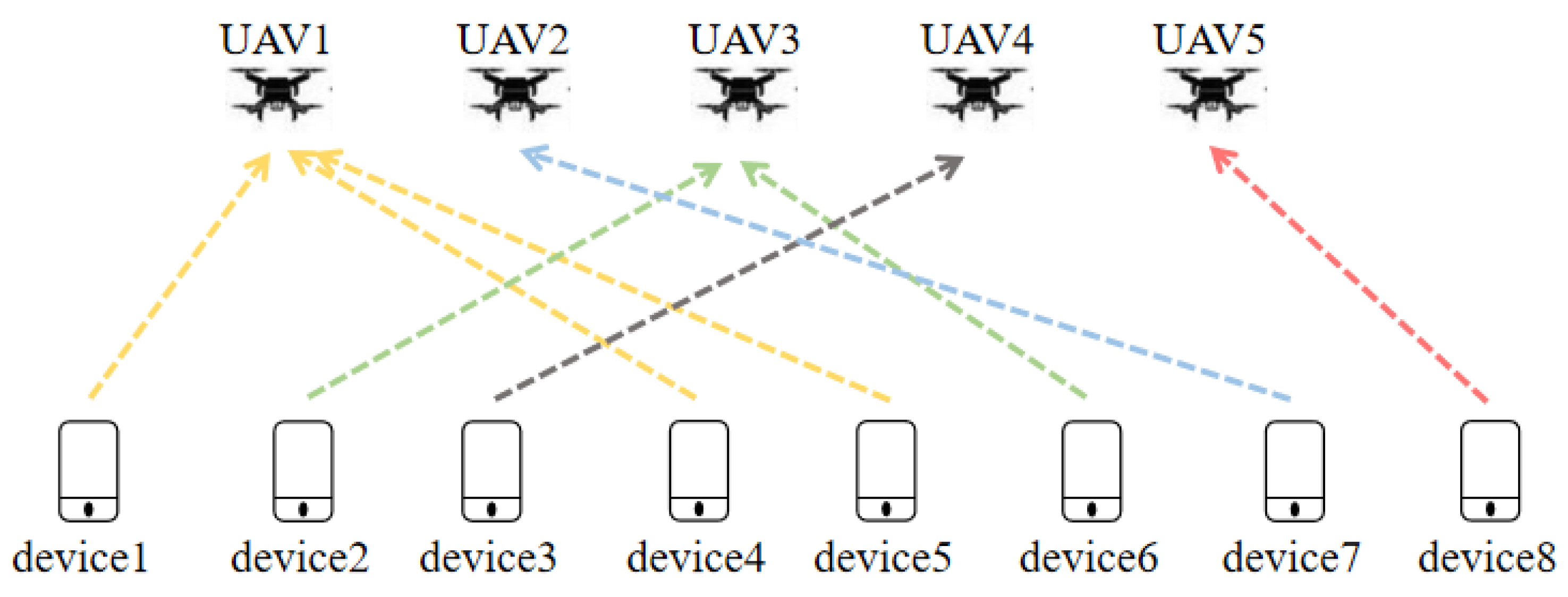
In Figure 3, the number m in the nth index of the individual x denotes UAV m is connected to the nth AIoT device (i.e., the nth AIoT device is assigned to UAV m). In this way, the distribution can be directly expressed, the number of UAVs can be counted from the solution by adding up the different indexes of UAVs, and the location of UAVs can be calculated by the Fermat’s problem (the central point of connected devices) [20]. For example, the solution x = {1, 3, 4, 1, 1, 3, 2, 5} represents that five UAVs (1, 3, 4, 2, 5) are used which are connected to the devices {1, 4, 5}, the devices {2, 6}, the device {3}, the device {7}. and the device {8}, respectively, as is shown in Figure 4.
3.3. Pseudo-Random Initialization
The number of used UAVs is significant for the energy consumption. If a UAV can communicate with Upper_Limit devices at most, for N AIoT devices, N/Upper_Limit UAVs should be used at least. Therefore, in the pseudo-random initialization, each device is connected with a random UAV whose index is smaller than N/Upper_Limit. Then, if the number of the connected devices of the UAV is bigger than Upper_Limit, a new random UAV will be used whose index is among a bigger range. The pseudo-code of the initialization method is shown in Algorithm 2.
| Algorithm 2: Pseudo-random initialization |
| Input: N: the number of devices; Upper_Limit: the maximum number of connected devices of a UAV Output: pop: the initial population
|
3.4. isoTcode
The isoTcode is designed to transcode solutions and distinguish the isomorphic solutions, which will also reduce the ambiguity of the individual communication and decrease the information loss in the crossover process. Therefore, this operator is the basis of MA-IT, which can help to implement the Crossover_isoT and LS_isoT operator. Algorithm 3 describes the isoTcode process.
| Algorithm 3: isoTcode |
| Input: pop: the population Output: pop: the population after being transcoded
|
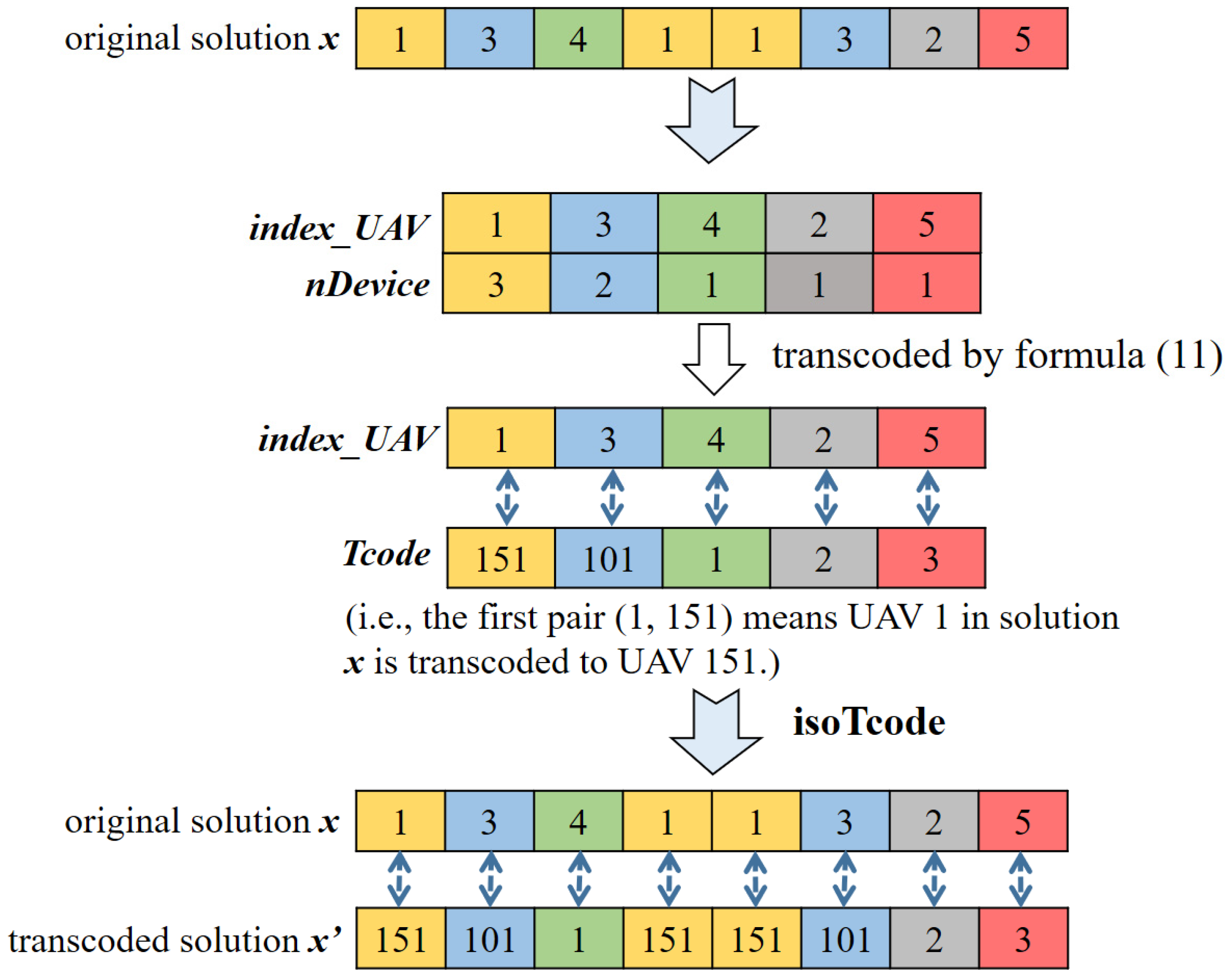
The isoTcode is implemented on each solution of the population. The array index_UAV is used to record the index of UAVs that appears in the solution (i.e., if index_UAV = {1, 3, 4, 2, 5}, it means this solution uses UAV 1, UAV 3, UAV 4, UAV 2, and UAV 5), and the array nDevice is used to record the number of connected devices of each UAV in lines (i.e., if nDevicem = i, it means i AIoT devices are connected to UAV m) 2 and 3, respectively. The transcoding index of each UAV is stored in a new array Tcode (i.e., if Tcodem = i, it means the index of UAV m is transcoded to i) by Formula (11) in lines 4 to 6:
where N is the number of the AIoT devices, nDevicem is the number of connected devices of UAV m, ordm is the order index of nDevicem appearing in the same value of nDevice (e.g., when nDevice = {3, 2, 1, 1, 1} and nDevice4 = 1, ord4 = 2), and ⌈.⌉ means the number rounded up. Lastly, the UAV number in each solution is replaced with Tcode in line 7.
Figure 5 shows an example of the isoTcode operator, where N (the number of devices in Formula (11)) = 100. Firstly, index_UAV and nDevice of solution x are calculated, and index_UAV = {1, 3, 4, 2, 5} and nDevice = {3, 2, 1, 1, 1}. Then, Tcode = {151, 101, 1, 2, 3} of solution x are calculated by Formula (11). Lastly, the original solution x = {1, 3, 4, 1, 1, 3, 2, 5} is transcoded to the solution x’ = {151, 101, 1, 151, 151, 101, 2, 3}. Before the isoTcode operator, the index of the UAV is random which results in a certain difference among solutions. In the example of Figure 5, the index of the UAV connected with two devices is encoded in the range [101, 150] in the transcoded solution instead of the random number in the original solution. After the isoTcode operator, the index of the UAV connected with the same number of devices can be easily identified. For example, in x = {1, 3, 4, 1, 1, 3, 2, 5} and x1 = {6, 3, 4, 6, 6, 3, 2, 5} (assuming N = 100), both UAV 1 in x and UAV 6 in x1 are connected to the 1st, 4th, and 5th devices, and are transcoded to the index 151. The connections of other UAVs are the same, and therefore, x and x1 are isomorphic after transcoding.
3.5. Crossover_isoT
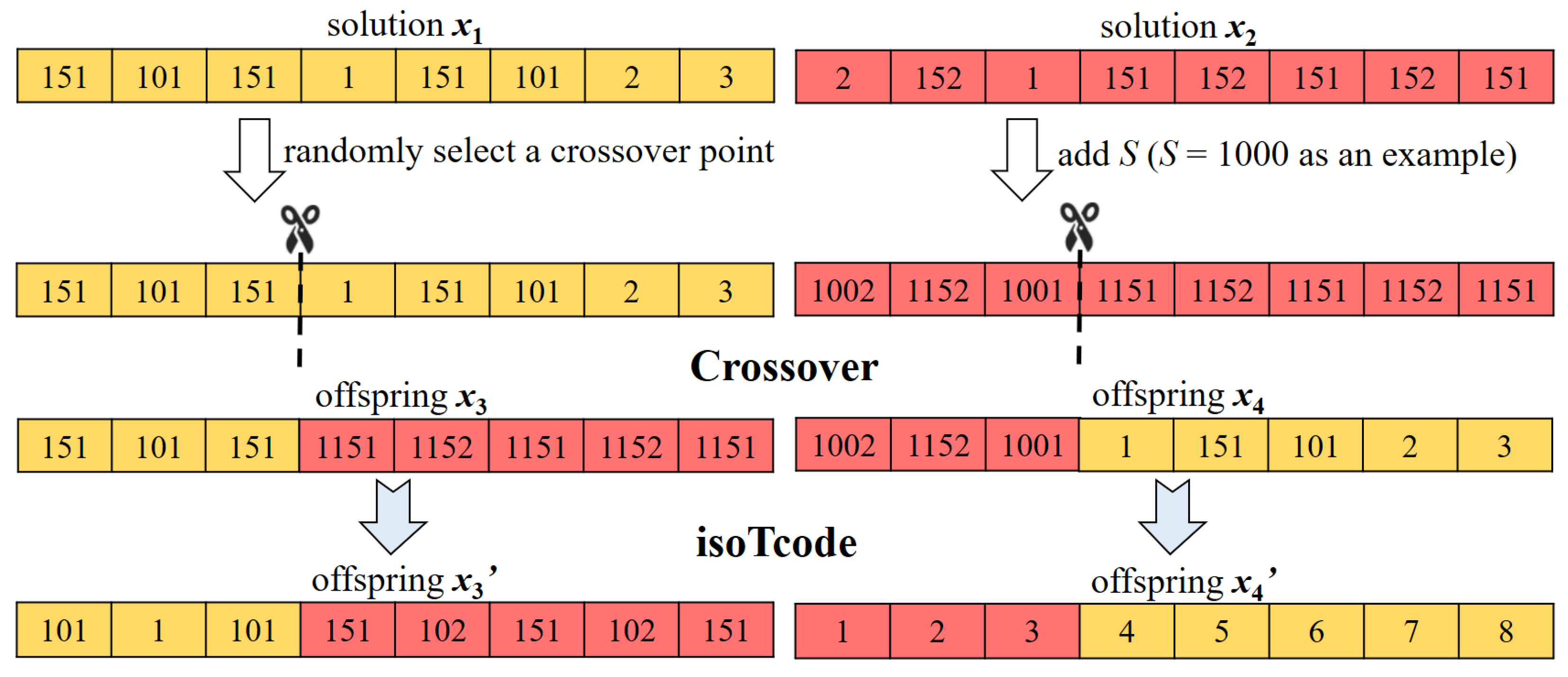
Before the Crossover_isoT, the parent solutions are chosen by the roulette wheel selection [8,28]. It should be noted that both the Crossover_isoT operator and the LS_isoT operator are based on the isoTcode operator. To distinguish the same index of UAV in two solutions, a big number S can be added to the index of a solution, and the changed solution and the original solution are isomorphic and have the same practical meaning. For example, in Figure 6, both x1 = {151, 101, 1, 151, 151, 101, 2, 3} and x2 = {151, 152, 1, 151, 152, 151, 152, 2} use the UAV 151, but the UAV 151 in the two solutions has different connections. After adding S to x2, a new solution x2′ is obtained, x2 and x2′ can be transcoded to the same solution by isoTcode, and at the same time, x1 and x2′ will be distinguished. Then a random point is selected to implement the crossover, and two new offspring solutions are obtained. The offspring solutions are also transcoded by isoTcode for the unified coding.
In addition, the offspring solutions after Crossover_isoT will be feasible, since the connection number of all UAVs will not exceed the maximum limit. However, if the index of UAVs in parent solutions does not add S and is not distinguished, there will be more of the same UAVs in offspring solutions after crossover, which means some UAVs will connect more devices than the maximum limit. For example, in Figure 6, x2 does not add S, x3 will be {151, 101, 151, 151, 152, 151, 152, 151} and the UAV 151 connects from three to five devices and may exceed the maximum limit.
Algorithm 4 describes the process of Crossover_isoT where NP new solutions offspring are generated. Firstly, two parents x1 and x2 are selected by the roulette wheel selection from pop. If the crossover probability is satisfied, two new solutions x3 and x4 are generated by the single-point crossover of x1 and (x2 + S), and added in offspring in lines 4 to 7. Lastly, in line 10, offspring is transcoded by the isoTcode operator.
| Algorithm 4: Crossover_isoT |
| Input: pop: the population; NP: the population size Output: offspring: the population after crossover
|
3.6. LS_isoT
If the probability of local search pls is satisfied, the LS_isoT will be implemented for each solution in the generated population offspring after Crossover_isoT. The pseudo-code of LS_isoT is shown in Algorithm 5. Firstly, two indexes of UAVs (m1 and m2) are randomly selected, and the number of the connected AIoT devices with the two UAVs is recorded as sum. If sum ≤ Upper_Limit and the probability of merging all of the connected AIoT devices with m1 and m2 is satisfied, these devices will be connected to the same UAV (m1 or m2); otherwise, these devices will be reassigned randomly to UAV m1 or UAV m2 with satisfying the maximum limit Upper_Limit of the connections, in lines 3 to 9. In this way, the number of UAVs can decrease. For example, in the solution x = {1, 3, 4, 1, 1, 3, 2, 5}, if UAV 1 and UAV 3 are chosen and the condition in line 5 is satisfied, the connected devices {1, 2, 4, 5, 6} can be assigned to one UAV. Lastly, offspring is also transcoded by the isoTcode operator.
| Algorithm 5: LS_isoT |
| Input: offspring: the population after Crossover_isoT Output: offspring: the population after local search
|
4. Experimental Result and Comparisons
4.1. Experimental Setting
The experiment was conducted on seven random occasions with different problem scales. Three algorithms were used for comparison, including DE with a new encoding mechanism (DEEM) [23], DE with variable population size (DEVIPS) [15], and K-means with genetic algorithm (Kmeans-GA). Specifically, the DEEM algorithm needs to define the number of UAVs in this model and uses the location of a UAV as a solution, and a device is connected to the nearest UAV to send data. The DEVIPS algorithm is similar to the DEEM, where a solution is composed of a single UAV and the population only includes only one solution, but the number of UAVs dynamically changes. In addition, the DEVIPS applies a variable population size to optimize the number of UAVs. The two algorithms both use the DE algorithm to optimize the location of UAVs for reducing the energy consumption. The Kmeans-GA algorithm firstly determines the number of UAVs by the number of clusters obtained by Kmeans in [24], and then optimizes the distribution of UAVs in each cluster.
The parameters of all algorithms are set in Table 1. In the proposed MA-IT algorithm, the probability of Crossover_isoT pc, the probability of LS_isoT pls, and the merging rate pm are set as 50, 0.2, 0.8, and 0.5, respectively, and these parameters have also been investigated in Section 4.3. For the sake of fairness, the population size NP of MA-IT is set the same as Kmeans-GA. In addition, each algorithm is run 30 times independently in each instance, and the average fitness value is calculated to represent the final energy consumption of the system obtained by the corresponding algorithm. The parameter settings in the problem model are the same as [15]: the service area of UAVs is set in a range of 10 m × 10 m; the height of UAVs is fixed at 200 m (H = 200); the maximum connected number of devices with a UAV Upper_Limit is set as 5; the power of a device pAIoT, the hover power of a UAV pUAV, and the power of the receiver pREC are set to 0.1 W, 700 W, 300 W, respectively; B, pChan, pTrans, and pNoise2 are set to 1 MHz, −30 dB, 0.1 W, and −250 dB, respectively; the maximum number of fitness evaluations (maxFEs) is set to 100,000 which is also the termination condition of all algorithms; and the number of AIoT devices N is set as 100, 200, 300, 400, 500, 600, and 700 which is able to scale for the real world. For convenience, all these parameter settings are summarized in Table A2 in Appendix A. Besides, in the seven random instances, β in Formula (4) is set as 0.01 to reduce the impact of the horizontal position of UAVs on the application of directional antennas within a certain range, and Dn in Formula (6) is randomly distributed within (100, 10,000) MB.
4.2. Comparative Results and Discussions
The results of all algorithms in each instance (Inst.) are shown in Table 2, including the mean value (Mean) and the standard deviation (STD) of the consumption energy (Emodel) of 30 runs. The second to last line in the table represents the average value (Avg.) of all instances of the corresponding algorithm. The smaller results of Emodel are better in the problem, and the bold data in the table represent the best result among all algorithms. Moreover, for the comparison of the energy efficiency improvements (EEI) of the proposed algorithm with other algorithms, the percentage of EEI is calculated as (12) and is shown in the last line in Table 2. Larger results of EEI mean MA-IT can get bigger energy efficiency improvements that are much better than the corresponding algorithm.
It can be observed from Table 2 that the results obtained by the proposed MA-IT algorithm are the best in all the instances. Moreover, MA-IT can obtain 30% to 40% of energy efficiency improvements to the compared algorithms. With the increase of the problem scale, the performance of MA-IT does not deteriorate, and the results of the proposed algorithm are still the best. This is due to the fact that MA-IT solves the problem and generates better solutions from different angles, including the simplified encoding method for representing solutions briefly and reducing the solution space, the pseudo-random initialization for greedily and randomly generating the initial population, Crossover_isoT for generating more feasible solutions and improving the solution diversity, and LS_isoT for improving solutions and speeding up the convergence of the algorithm. However, DEVIPS and DEEM only determine the distribution of UAVs greedily, and Kmeans-GA fixes the device clusters at the beginning, both of which will hamper the improvement of solutions. Therefore, the results of the comparative algorithms, including DEVIPS, DEEM, and Kmeans-GA, are similar in different instances.
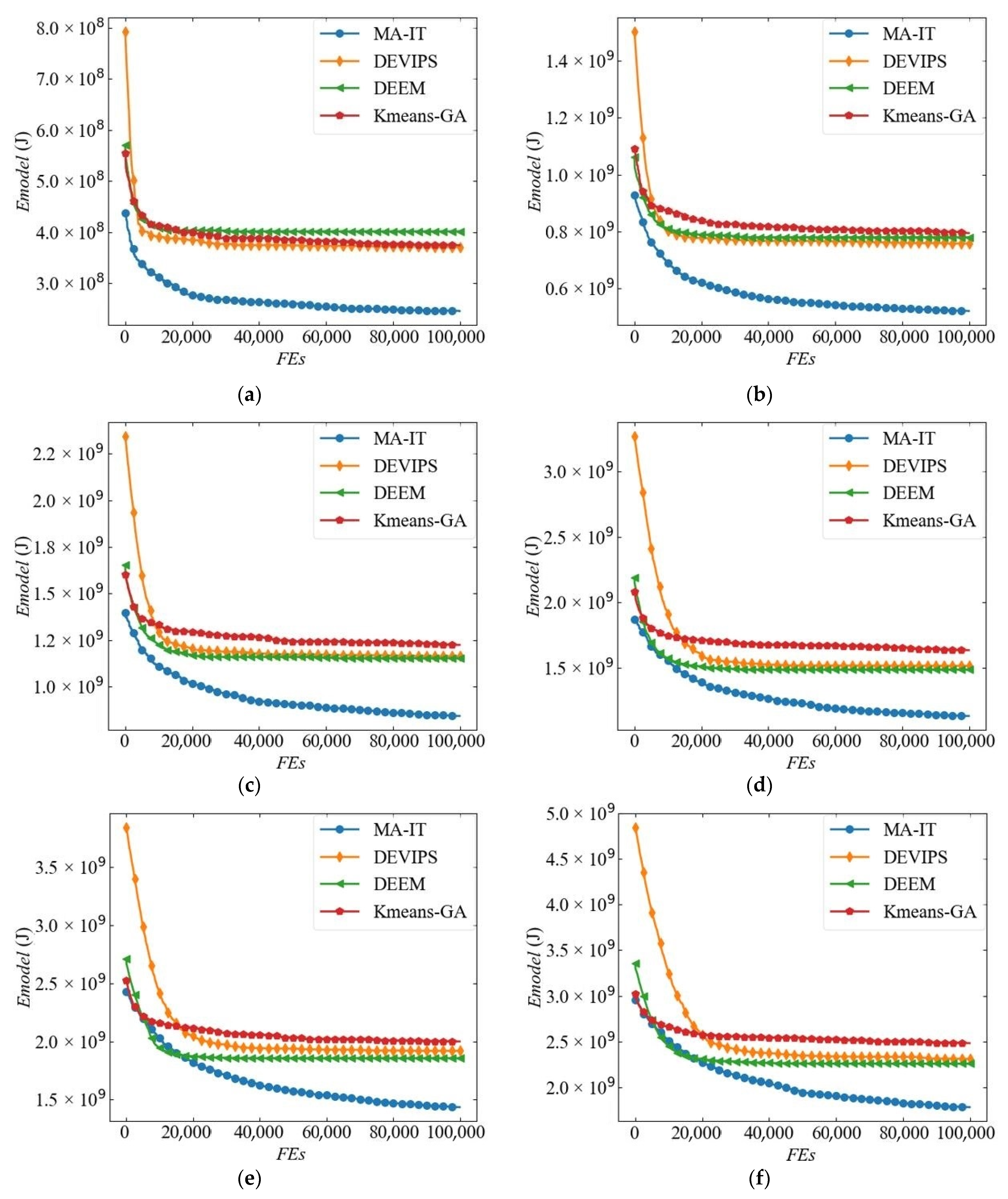
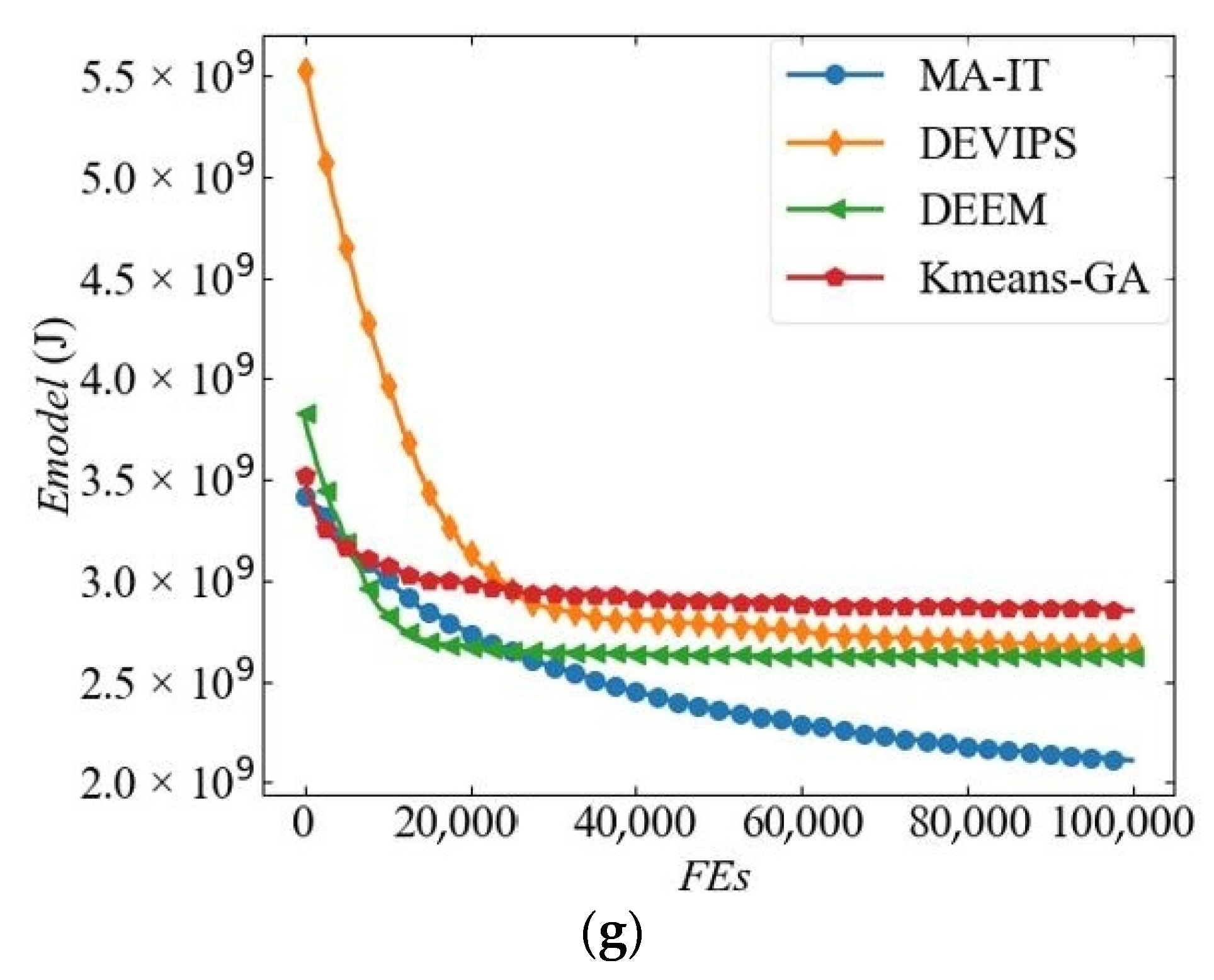
Figure 7 shows the convergence graphs of all algorithms in different instances. From the observation of Figure 7, it can be seen that in the beginning, the proposed MA-IT algorithm can get better results than other contestant algorithms in all instances. The reason is that MA-IT uses a pseudo-random initialization which generates solutions within a narrowed space greedily and randomly. In contrast, DEVIPS initializes solutions in a large space randomly which always leads to worse solutions. Besides, the comparative algorithms converge much earlier than MA-IT, and have fewer improvements in the later evolutionary process, since these algorithms are not effective in improving solutions. Differently, the MA-IT algorithm uses Crossover_isoT to generate more feasible solutions and uses LS_isoT to improve these solutions, which helps to generate promising solutions continuously. This result also proves that MA-IT is more competent than other algorithms on the UAV deployment optimization problem.
4.3. Sensitivity Analysis of Parameters
Compared with the variable control method, the Taguchi method does not need to conduct experiments on all combinations of parameters with different settings, which greatly reduces the experiment consumption [29]. Therefore, the Taguchi method is used to analyze the parameter settings, including the probability of crossover pc, the probability of local search pls, and the probability of mergence pm. According to the problem model, a Taguchi model with three parameters and three levels—pc∈{0.2, 0.5, 0.8}, pls∈{0.2, 0.5, 0.8}, and pm∈{0.2, 0.5, 0.8}—is designated. The orthogonal matrix (LX(QY) = L9(33)) is given in Formula (13), where Y is the number of combinations of the test cases, Q is the number of parameters, and X is the number of levels.
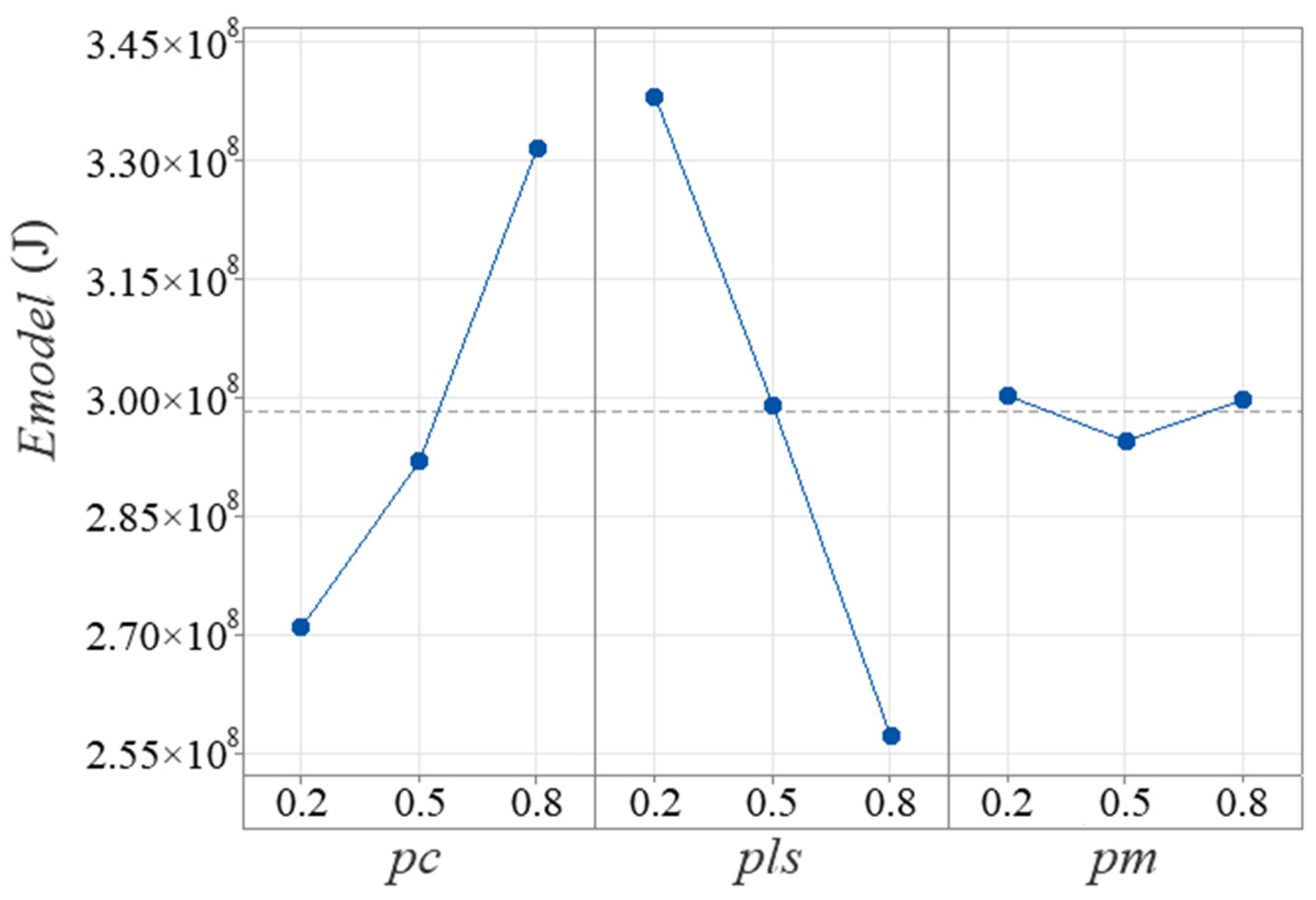
The results of the corresponding combinations of the parameter settings in Formula (13) are shown in Table 3. The experiment on each combination of the parameter settings is conducted for 30 runs independently, and the mean value is shown in the last column in the table. Then, the result of the Taguchi method can be obtained from Table 3, and is shown in Figure 8. In the minimization problem, it can be seen from the figure that when pc = 0.2, pls = 0.8, and pm = 0.5, the result is better than other parameter settings. For the value of pc, the higher pc helps to generate new feasible solutions, but will lead to the use of more UAVs and increase the energy consumption. Therefore, the lower value of pc is more suitable for the problem. For the value of pls, the higher pls means that there are more opportunities to implement LS_isoT and improve solutions. For the value of pm, there are no significant differences among different values of pm since the mergence and the reassignment of devices are both effective in LS_isoT.
4.4. Effectiveness of MA-IT
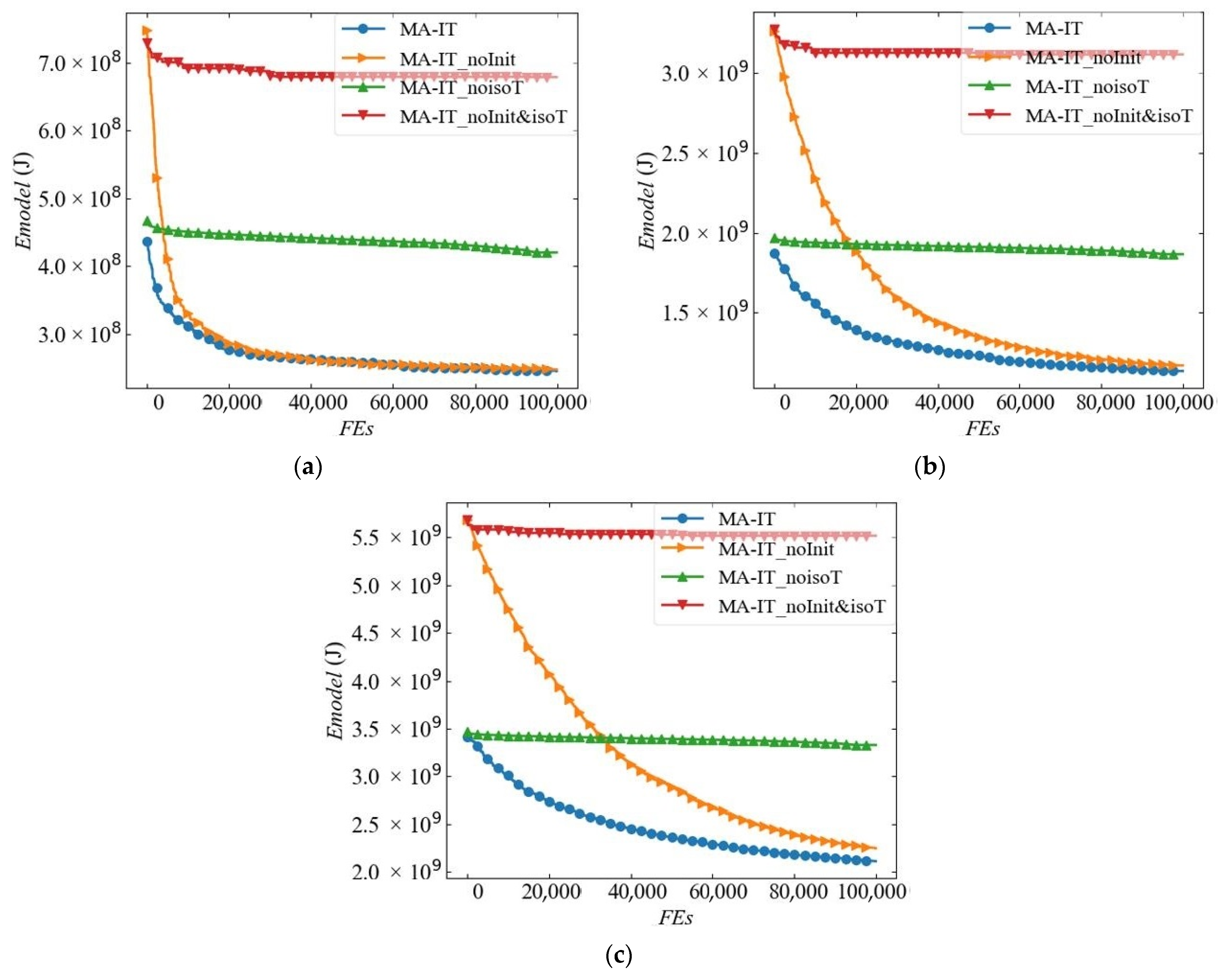
In this section, the effectiveness of MA-IT is validated in only three different problem scales for the space economy. Since Crossover_isoT and LS_isoT are both based on isoTcode, only the pseudo-random initialization and the transcoding method isoTcode are investigated. MA-IT without the initialization, MA-IT without isoTcode which is only with the classical single-point crossover and local search (mutation is used as the local search in MA), and MA-IT without the initialization and isoTcode are denoted as MA-IT_noInit, MA-IT_noisoT, and MA-IT_noInit&isoT, respectively. The convergence graph of these algorithms is shown in Figure 9.
From observation of Figure 9, it can be seen that the proposed MA-IT algorithm performs best in three instances, which proves the effectiveness of the initialization and the isoTcode. Firstly, the result of MA-IT_noInit&isoT is worst, since without the pseudo-random initialization and isoTcode, the algorithm turns to be the simplest MA and is poor on the problem. Secondly, without isoTcode, MA-IT_noisoT can obtain similar initial solutions to MA-IT, but the results have fewer changes later, because the simple encoding cannot represent the practical meanings of solutions and other corresponding operators (including crossover and LS) work inefficiently. Thirdly, without the pseudo-random initialization, MA-IT_noInit cannot obtain better initial solutions, but Crossover_isoT and LS_isoT based on isoTcode can help to generate effective solutions. Therefore, it can be concluded that both the pseudo-random initialization and the transcoding method isoTcode are significant for the effectiveness of MA-IT.
5. Conclusions
In this paper, a MA-IT algorithm is proposed to optimize the deployment of the UAV and reduce the energy consumption for improving the efficiency of data collection in AIoT. The main novelties of MA-IT can be summarized as follows: Firstly, a simplified encoding method is proposed to only use the distribution of UAVs as the solution, which can reduce the solution space and help the algorithm search quickly. Secondly, a pseudo-random initialization is used to generate the initial population randomly and greedily. Thirdly, an isoTcode operator is proposed which transcodes the original individuals with the isomorphic relations and represent the practical meaning of solutions. Fourthly, Crossover_isoT and LS_isoT are used with the problem-related knowledge to improve the solution diversity and the solution quality. A set of random instances with different scales and three comparison algorithms are used for the comparative experiment. The experimental results illustrate that the MA-IT is superior to the comparisons.
In future work, we will study the path-planning of UAVs. Especially in material transportation during the epidemic, UAVs are convenient for urban material distribution, which helps to reduce personal contact.
Author Contributions
Methodology, X.Z. and Y.C.; writing—original draft preparation, Y.C.; writing—review and editing, X.Z.; funding acquisition, X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded in part by the National Natural Science Foundation of China under Grant No. 62106088 and in part by the High-Level Personnel Project of Jiangsu Province (JSSCBS20210852).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Summary of all the symbols in the mathematical problem model.
| Symbols | Descriptions |
|---|---|
| N | Number of AIoT devices |
| M | Number of UAVs |
| n | Index of AIoT device |
| m | Index of UAV |
| Upper_Limit | Maximum number of connections |
| Xm | X-axis of UAV |
| Ym | Y-axis of UAV |
| H | Height of UAV |
| xn | x-axis of AIoT device |
| yn | y-axis of AIoT device |
| Connn,m | Connection relationship |
| disn,m | Distance |
| β | Coefficient of the directional antenna |
| rn,m | Transmitting rate |
| B | Channel bandwidth |
| pTrans | Transmitting power |
| pChan | Channel power |
| pNoise | Noise power |
| tAIoTn | Work time of AIoT device |
| Dn | Data quantity |
| tUAVm | Work time of the UAV |
| EUAV | Energy consumption of UAV |
| EAIoT | Energy consumption of AIoT device |
| pUAV | Power of the UAV |
| pREC | Power of the receiver |
| pAIoT | Power of the AIoT |
| Emodel | Energy consumption of the model |
| J | Unit of Joule |
Table A2.
Summary of all parameters used in the experiment.
| Parameters | Settings |
|---|---|
| H | 200 m |
| Upper_Limit | 5 |
| pAIoT | 0.1 W |
| pUAV | 700 W |
| pREC | 300 W |
| B | 1 MHz |
| pChan | −30 dB |
| pTrans | 0.1 W |
| pNoise2 | −250 dB |
| maxFEs | 100,000 |
| β | 0.01 W |
| Dn | (100, 10,000) MB |
| N | 100, 200, 300, 400, 500, 600, 700 |
References
- Wallace, A.A. When AI Meets IoT: AIoT. In The Emerald Handbook of Computer-Mediated Communication and Social Media; Emerald Publishing Limited: Bingley, UK, 2022; pp. 481–492. [Google Scholar]
- Li, H.; Savkin, A.V. Wireless sensor network based navigation of micro flying robots in the industrial internet of things. IEEE Trans. Ind. Inform. 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Mezghani, E.; Exposito, E.; Drira, K. A model-driven methodology for the design of autonomic and cognitive IoT-based systems: Application to healthcare. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 1, 224–234. [Google Scholar] [CrossRef]
- Lai, K.T.; Chung, Y.T.; Su, J.J. AI Wings: An AIoT Drone System for Commanding ArduPilot UAVs. IEEE Syst. J. 2022. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A. Internet of things for smart cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Yang, X.; Xu, Y.; Kuang, L. An information fusion approach to intelligent traffic signal control using the joint methods of multiagent reinforcement learning and artificial intelligence of things. IEEE Trans. Intell. Transp. Syst. 2021, 23, 9335–9345. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Kim, Y.H.; Yoon, Y. A Memetic Algorithm with a Novel Repair Heuristic for the Multiple-Choice Multidimensional Knapsack Problem. Mathematics 2022, 10, 602. [Google Scholar] [CrossRef]
- Tung, T.V.; An, T.T.; Lee, B.M. Joint Resource and Trajectory Optimization for Energy Efficiency Maximization in UAV-Based Networks. Mathematics 2022, 10, 3840. [Google Scholar] [CrossRef]
- Li, J.; Liu, H.; Lai, K.K. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Nguyen, C.V.; Do, H.T. Uav-assisted data collection in wireless sensor networks: A comprehensive survey. Electronics 2021, 10, 2603. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef] [Green Version]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Alzenad, M.; El-Keyi, A.; Lagum, F. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.Q.; Wang, Y.; Wang, K. Differential evolution with a variable population size for deployment optimization in a UAV-assisted IoT data collection system. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 4, 324–335. [Google Scholar] [CrossRef]
- Han, S.; Zhu, K.; Zhou, M.C. Joint Deployment Optimization and Flight Trajectory Planning for UAV Assisted IoT Data Collection: A Bilevel Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21492–21504. [Google Scholar] [CrossRef]
- Dong, L.; Liu, Z.; Jiang, F. Joint Optimization of Deployment and Trajectory in UAV and IRS-assisted IoT Data Collection System. IEEE Internet Things J. 2022, 9, 21583–21593. [Google Scholar] [CrossRef]
- Dai, H.N.; Ng, K.W.; Li, M. An overview of using directional antennas in wireless networks. Int. J. Commun. Syst. 2013, 26, 413–448. [Google Scholar] [CrossRef]
- Neri, F.; Cotta, C. Memetic algorithms and memetic computing optimization: A literature review. Swarm Evol. Comput. 2012, 2, 1–14. [Google Scholar] [CrossRef]
- Krarup, J.; Roos, K. On the Fermat point of a triangle. Nieuw Arch. Voor Wiskd. 2017, 5, 280–286. [Google Scholar]
- Chen, X. Decentralized computation offloading game for mobile cloud computing. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 974–983. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, H.; Long, H. Differential evolution with a new encoding mechanism for optimizing wind farm layout. IEEE Trans. Ind. Inform. 2017, 14, 1040–1054. [Google Scholar] [CrossRef]
- Pena, J.M.; Lozano, J.A.; Larranaga, P. An empirical comparison of four initialization methods for the k-means algorithm. Pattern Recognit. Lett. 1999, 20, 1027–1040. [Google Scholar] [CrossRef]
- Kodinariya, T.M.; Makwana, P.R. Review on determining number of Cluster in K-Means Clustering. Int. J. Adv. Res. Comput. Sci. Mang. Stud. 2013, 1, 90–95. [Google Scholar]
- Ting, C.K.; Lee, C.N.; Chang, H.C. Wireless heterogeneous transmitter placement using multiobjective variable-length genetic algorithm. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 945–958. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.H.; Gong, Y.J.; Gu, T.L. Flexible genetic algorithm: A simple and generic approach to node placement problems. Appl. Soft Comput. 2017, 52, 457–470. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Du, K.J.; Zhan, Z.H.; Kwong, S.; Gu, T.L.; Zhang, J. Cooperative coevolutionary bare-bones particle swarm optimization with function independent decomposition for large-scale supply chain network design with uncertainties. IEEE Trans. Cybern. 2020, 50, 4454–4468. [Google Scholar] [CrossRef]
- Karna, S.K.; Sahai, R. An overview on Taguchi method. Int. J. Eng. Math. Sci. 2012, 1, 11–18. [Google Scholar]
Figure 1.
Illustration of the UAV deployment optimization in energy-efficient AIoT data collection.

Figure 2.
The solution encoding by using the location of UAVs. (a) Using all UAVs as an individual and (b) using a single UAV as an individual.
Figure 2.
The solution encoding by using the location of UAVs. (a) Using all UAVs as an individual and (b) using a single UAV as an individual.

Figure 3.
The simplified encoding.

Figure 4.
Illustration of the solution x = {1, 3, 4, 1, 1, 3, 2, 5}.

Figure 5.
An example of the isoTcode operator.

Figure 6.
An example of the Crossover_isoT.

Figure 7.
The convergence graphs of all algorithms in different instances. (a) N = 100, (b) N = 200, (c) N = 300, (d) N = 400, (e) N = 500, (f) N = 600, and (g) N = 700.
Figure 7.
The convergence graphs of all algorithms in different instances. (a) N = 100, (b) N = 200, (c) N = 300, (d) N = 400, (e) N = 500, (f) N = 600, and (g) N = 700.


Figure 8.
The results of the Taguchi method obtained from Table 3.
Figure 8.
The results of the Taguchi method obtained from Table 3.

Figure 9.
The results of different versions of MA-IT. (a) N = 100, (b) N = 400, and (c) N = 700.

Table 1.
Parameter settings of comparisons.
| Algorithm | Parameter Setting |
|---|---|
| DEEM | F = 0.9, CR = 0.9 [23] |
| DEVIPS | F = 0.6, CR = 0.5 [15] |
| Kmeans-GA | [25] |
| MA-IT | NP = 50, pc = 0.2, pls = 0.8, pm = 0.5 |
Table 2.
The results (energy consumption) of all algorithms (J).
| Inst. | N | MA-IT Mean (STD) | DEVIPS Mean (STD) | DEEM Mean (STD) | Kmeans-GA Mean (STD) |
|---|---|---|---|---|---|
| 1 | 100 | 2.4539 × 108 (1.5642 × 106) | 3.7053 × 108 (1.3782 × 107) | 3.8568 × 108 (2.8913 × 107) | 3.7438 × 108 (3.3571 × 107) |
| 2 | 200 | 5.1778 × 108 (4.6413 × 106) | 7.6387 × 108 (1.5420 × 107) | 7.7977 × 108 (4.6542 × 107) | 7.9427 × 108 (6.3542 × 107) |
| 3 | 300 | 8.4089 × 108 (4.6542 × 106) | 1.1627 × 109 (1.5037 × 107) | 1.1501 × 109 (9.6225 × 107) | 1.2233 × 109 (8.2316 × 107) |
| 4 | 400 | 1.1329 × 109 (6.6542 × 106) | 1.5167 × 109 (1.9215 × 107) | 1.4898 × 109 (1.5945 × 108) | 1.6361 × 109 (1.3803 × 108) |
| 5 | 500 | 1.4355 × 109 (7.3525 × 106) | 1.9175 × 109 (1.6542 × 107) | 1.8530 × 109 (2.1252 × 108) | 1.9987 × 109 (1.9752 × 108) |
| 6 | 600 | 1.7812 × 109 (8.6142 × 106) | 2.3090 × 109 (1.8282 × 107) | 2.2615 × 109 (2.6542 × 108) | 2.4810 × 109 (2.1564 × 108) |
| 7 | 700 | 2.1096 × 109 (9.9852 × 106) | 2.6772 × 109 (1.3542 × 107) | 2.6317 × 109 (2.9121 × 108) | 2.8515 × 109 (2.2575 × 108) |
| Avg. | 1.1519 × 109 | 1.5311 × 109 | 1.5074 × 109 | 1.6228 × 109 | |
| EEI | - | 32.91% | 30.86% | 40.88% | |
Table 3.
The results of MA-IT with different parameter settings.
| Inst. | pc | pls | pm | Emodel (J) |
|---|---|---|---|---|
| 1 | 0.2 | 0.2 | 0.2 | 3.0678 × 108 |
| 2 | 0.2 | 0.5 | 0.5 | 2.6178 × 108 |
| 3 | 0.2 | 0.8 | 0.8 | 2.4385 × 108 |
| 4 | 0.5 | 0.2 | 0.5 | 3.3375 × 108 |
| 5 | 0.5 | 0.5 | 0.8 | 2.8965 × 108 |
| 6 | 0.5 | 0.8 | 0.2 | 2.4648 × 108 |
| 7 | 0.8 | 0.2 | 0.8 | 3.6283 × 108 |
| 8 | 0.8 | 0.5 | 0.2 | 3.3737 × 108 |
| 9 | 0.8 | 0.8 | 0.5 | 2.8100 × 108 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, X.; Cao, Y. Memetic Algorithm with Isomorphic Transcoding for UAV Deployment Optimization in Energy-Efficient AIoT Data Collection. Mathematics 2022, 10, 4668. https://0-doi-org.brum.beds.ac.uk/10.3390/math10244668
AMA Style
Zhang X, Cao Y. Memetic Algorithm with Isomorphic Transcoding for UAV Deployment Optimization in Energy-Efficient AIoT Data Collection. Mathematics. 2022; 10(24):4668. https://0-doi-org.brum.beds.ac.uk/10.3390/math10244668
Chicago/Turabian StyleZhang, Xin, and Yiyan Cao. 2022. "Memetic Algorithm with Isomorphic Transcoding for UAV Deployment Optimization in Energy-Efficient AIoT Data Collection" Mathematics 10, no. 24: 4668. https://0-doi-org.brum.beds.ac.uk/10.3390/math10244668
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.