Parameters Estimation of Uncertain Fractional-Order Chaotic Systems via a Modified Artificial Bee Colony Algorithm

Abstract
:1. Introduction
2. Preliminaries
2.1. Caputo Fractional-Order Derivative
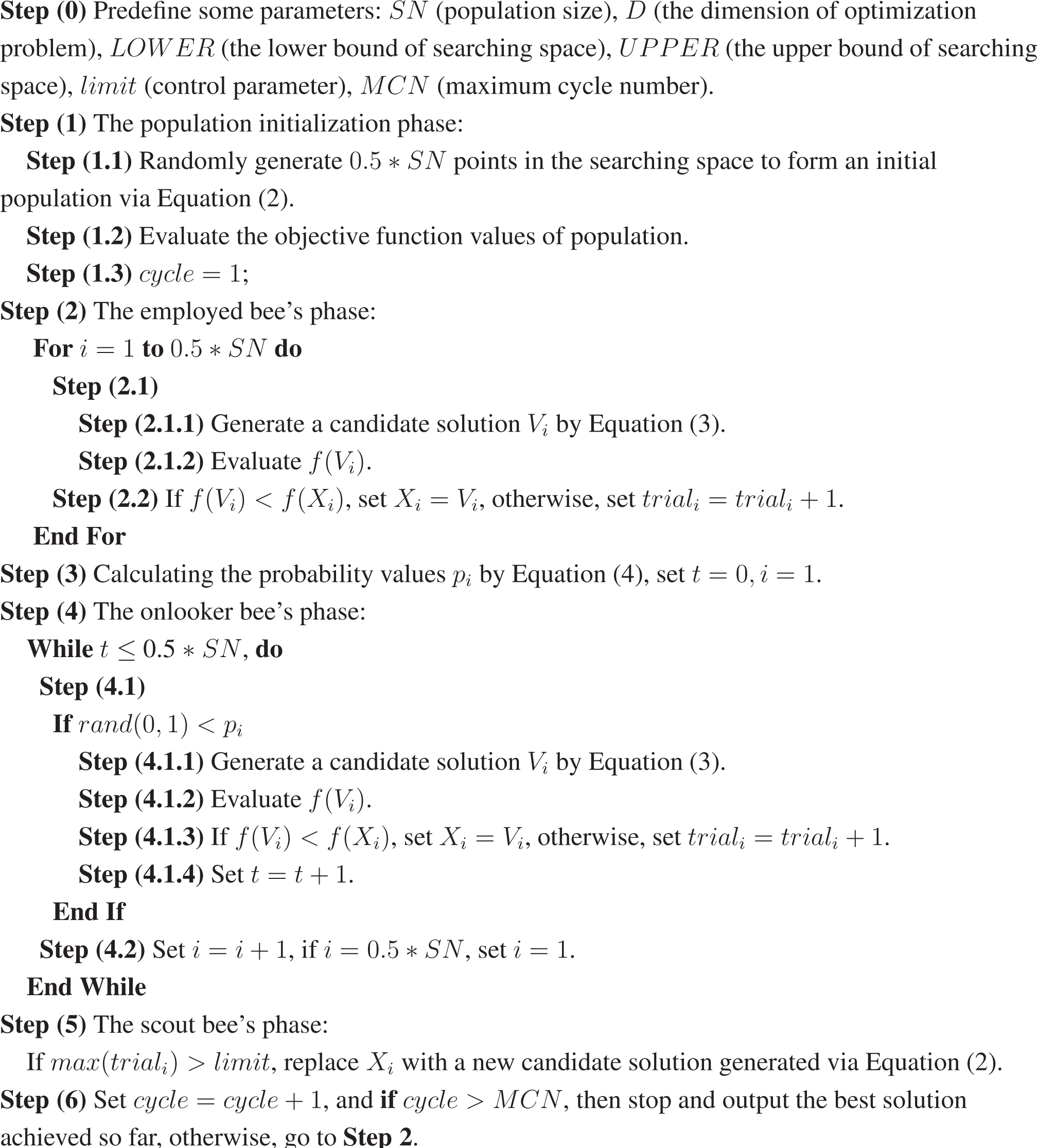
2.2. The Standard Artificial Bee Colony (ABC) Algorithm
2.2.1. Initialization of the Population
2.2.2. The Employed Bee Phase
2.2.3. Calculating Probability Values Referring to the Probability Selection
2.2.4. The Onlooker Bee Phase
2.2.5. The Scout Bee Phase
2.2.6. Framework of the Standard Artificial Bee Colony Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
3. Problem Formulation
4. A Modified Artificial Bee Colony Algorithm
4.1. Two Modified Solution Searching Equations
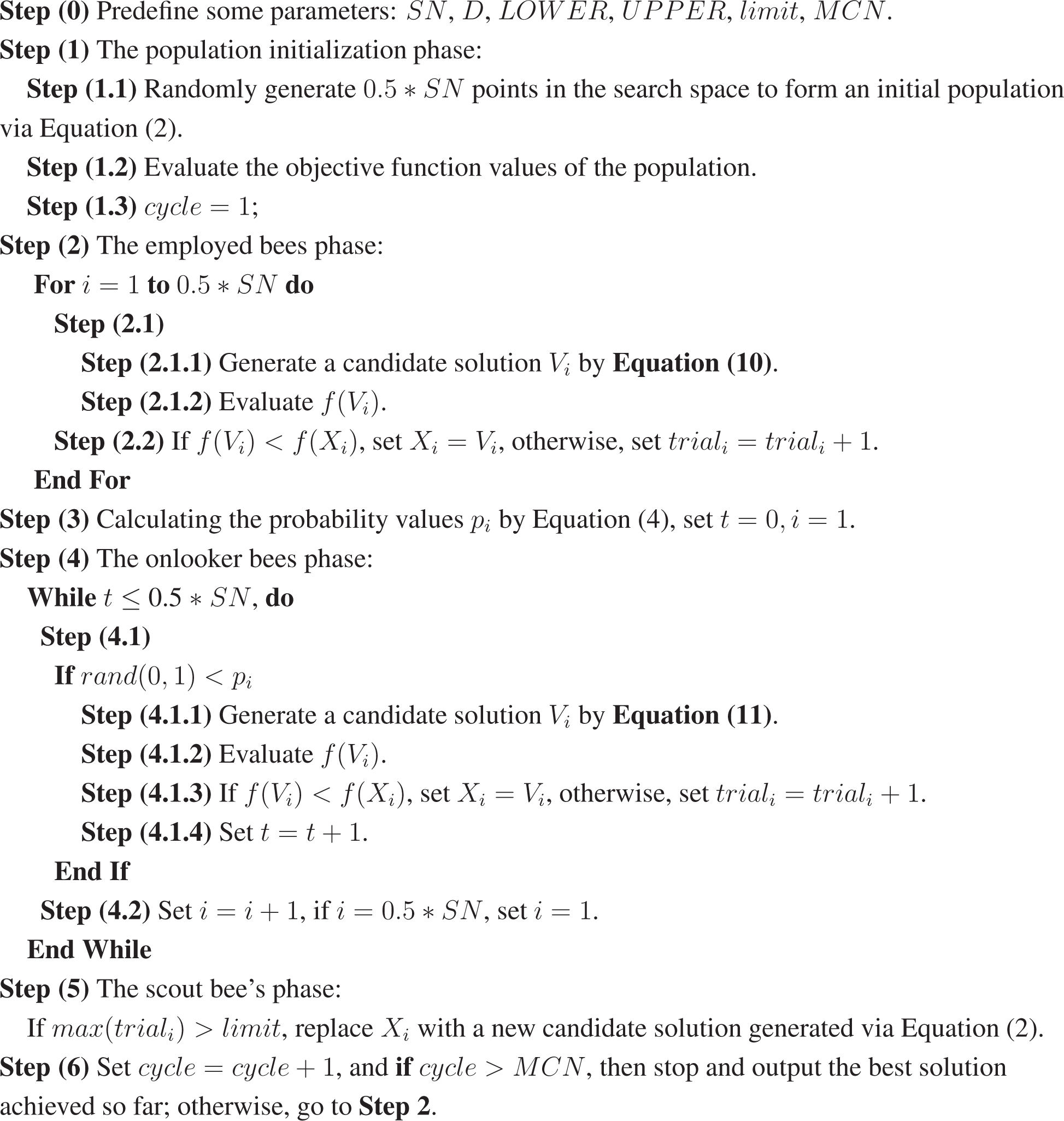
4.2. The Proposed Method
 |
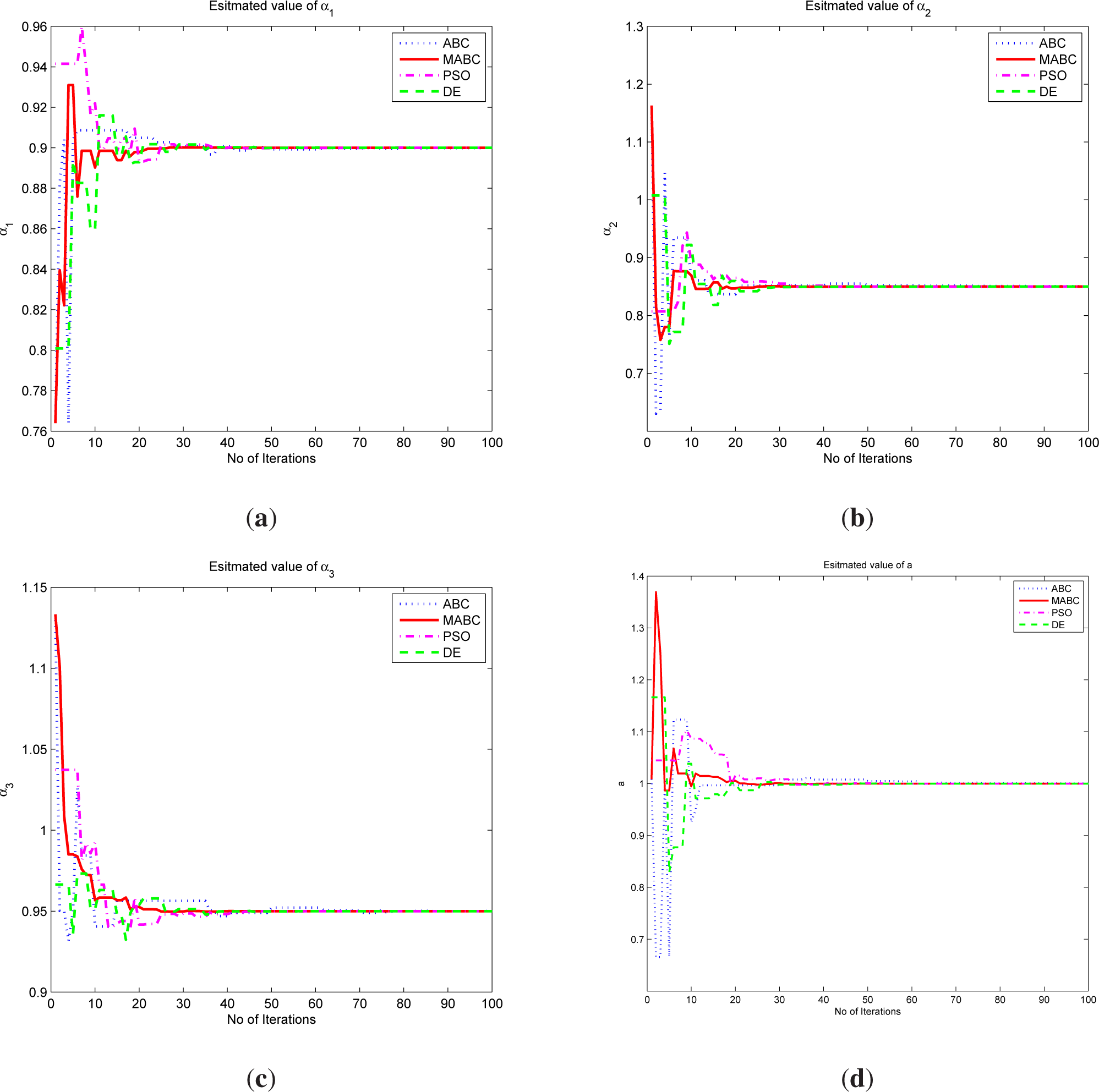
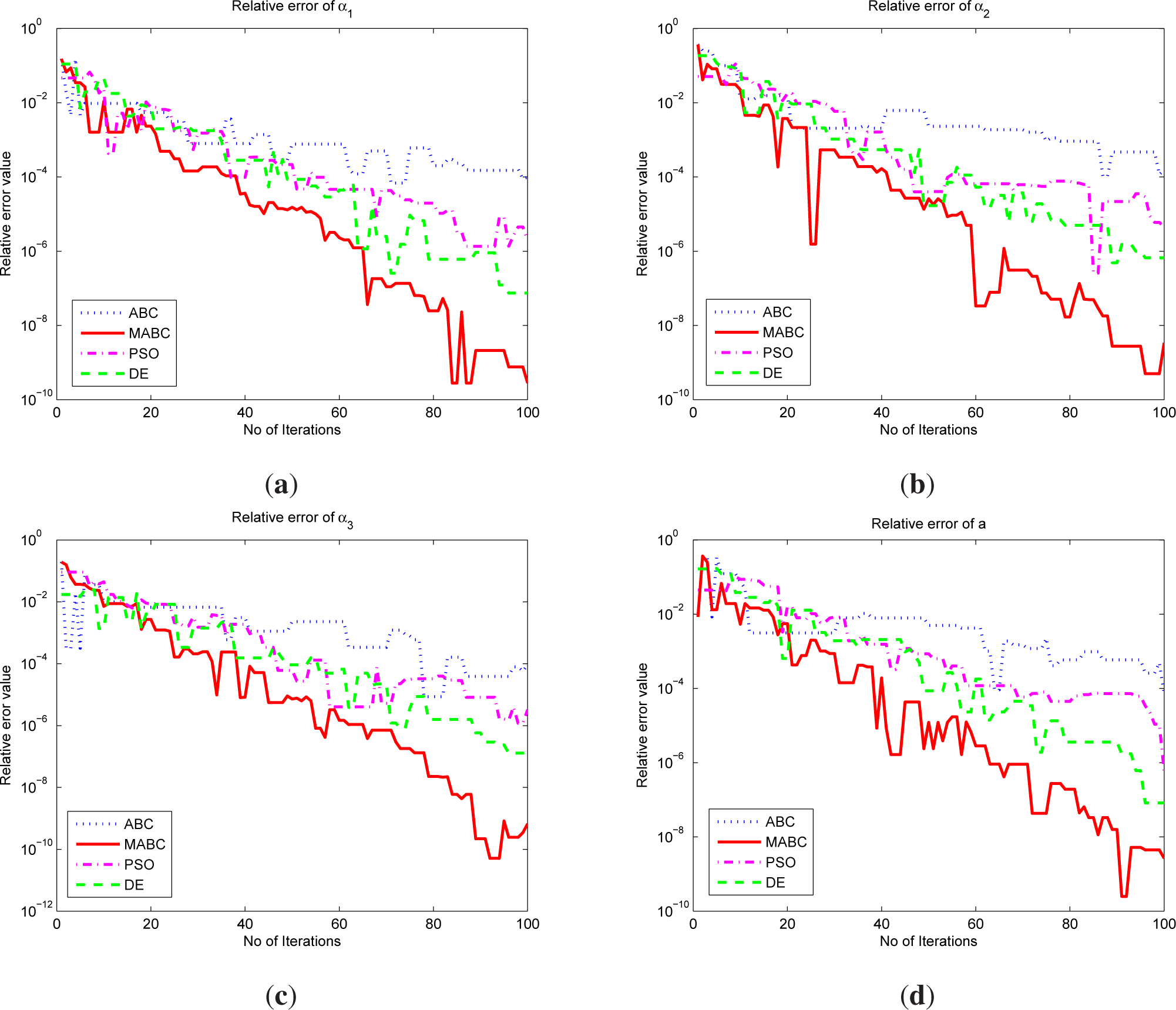
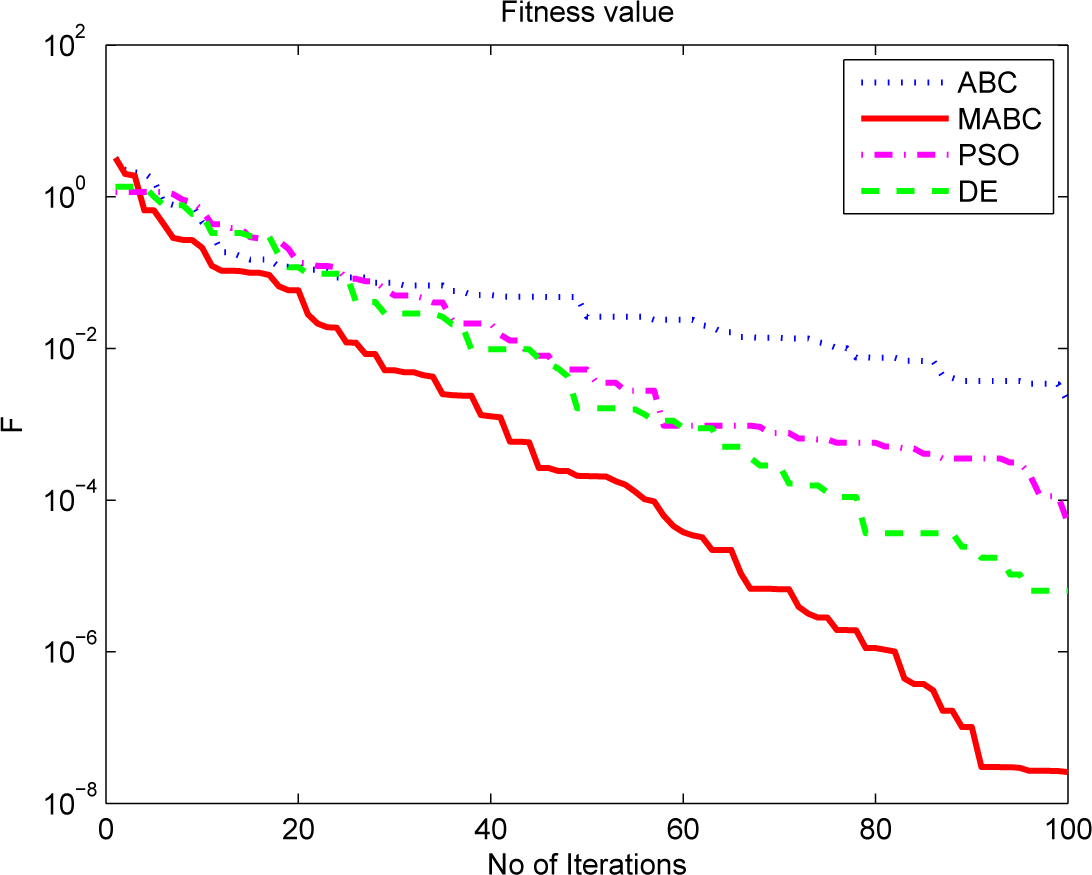
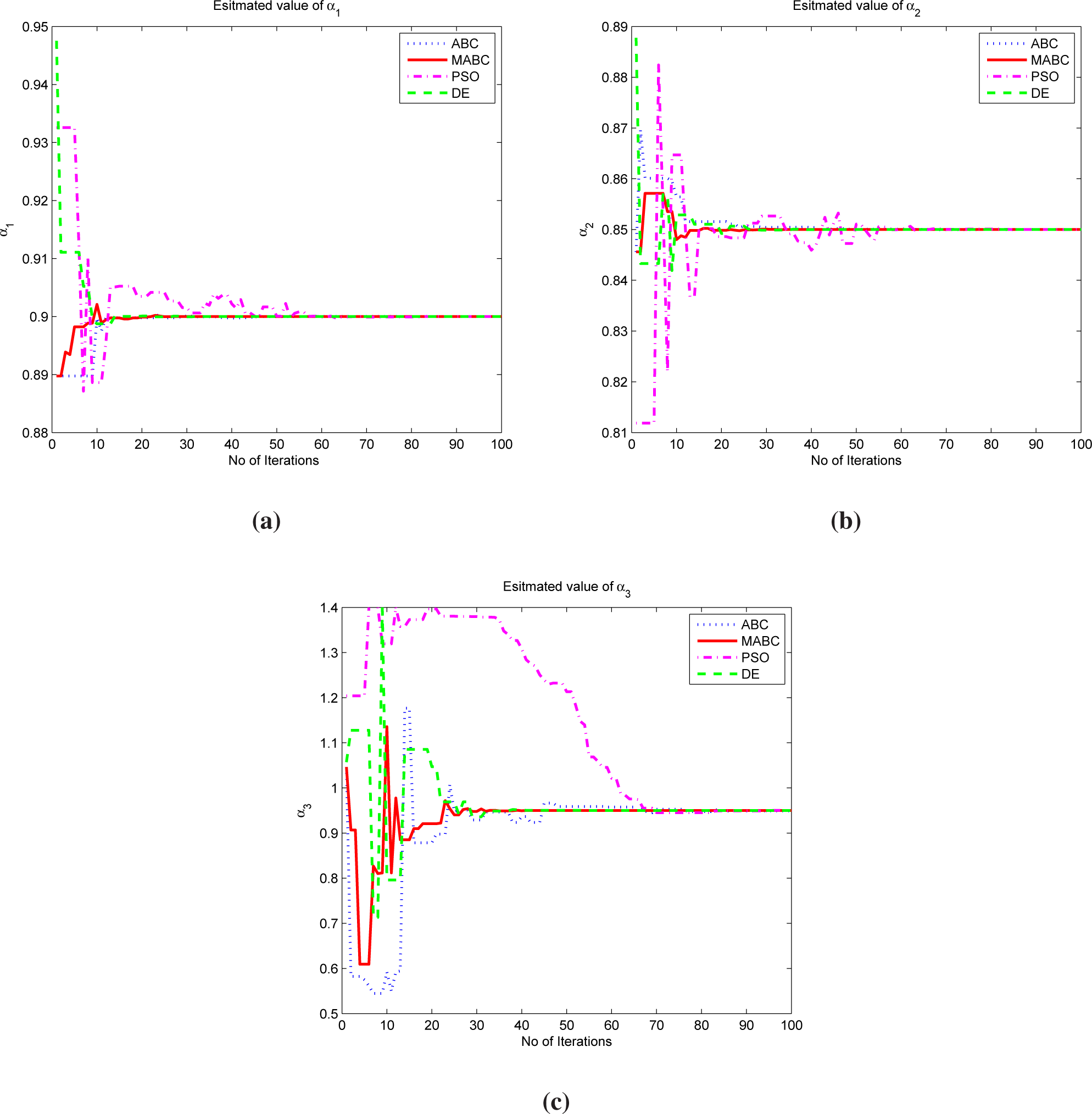
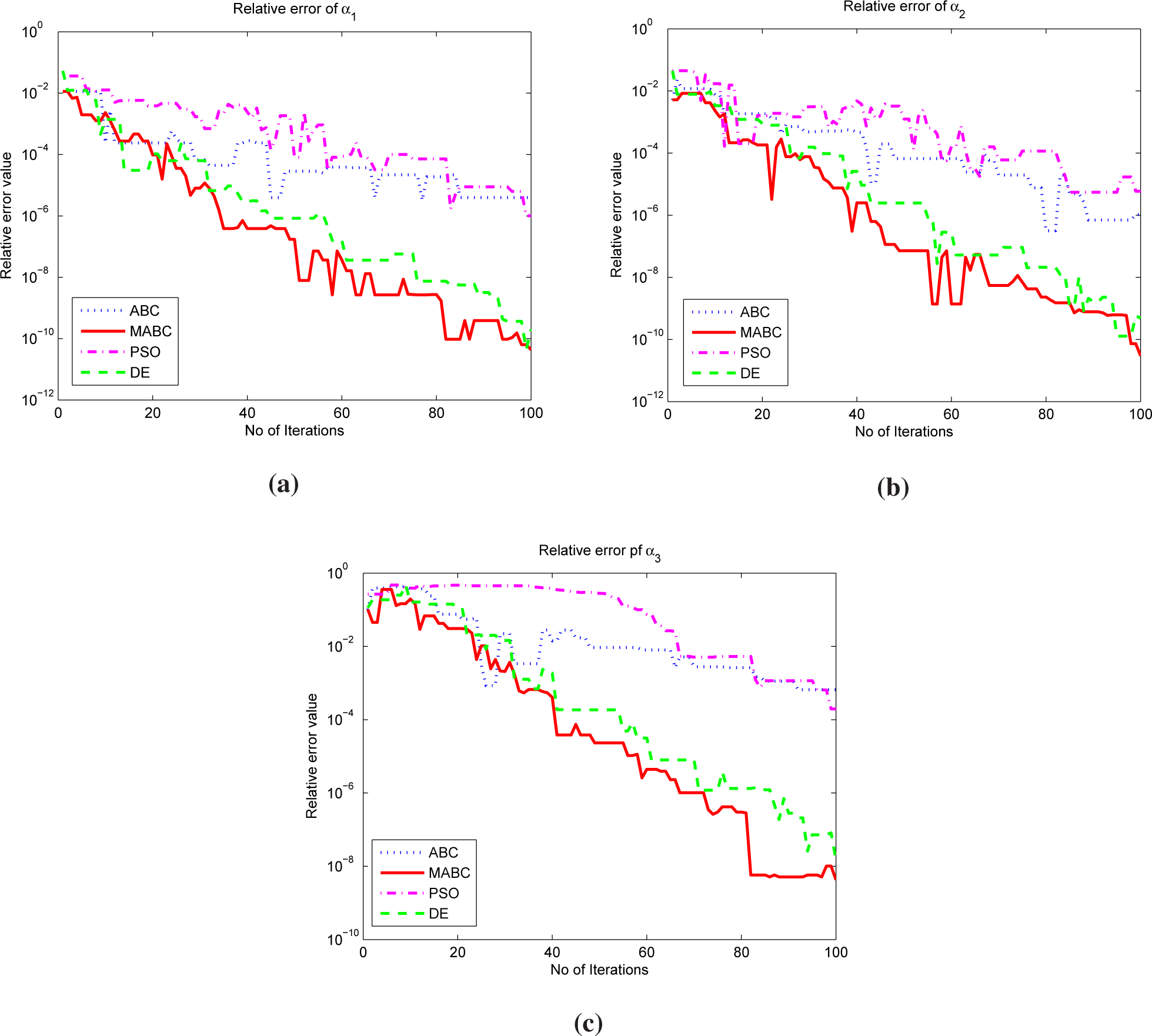
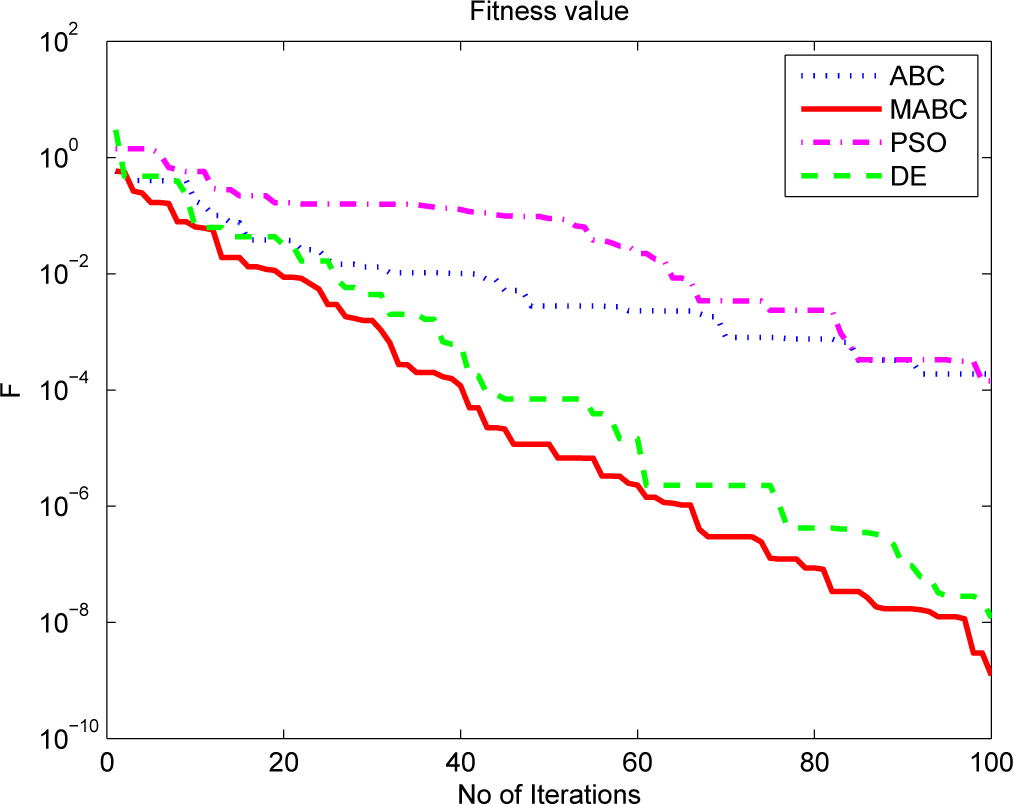
5. Simulations
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kilbas, A.A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, the Netherlands, 2006. [Google Scholar]
- Arena, P.; Caponetto, R.; Fortuna, L.; Porto, D. Nonlinear Noninteger Order Circuits and Systems—An Introduction; World Scientific: Singapore, Singapore, 2000. [Google Scholar]
- Rivero, M.; Rogosin, S.V.; Tenreiro Machado, J.A.; Trujillo, J.J. Stability of fractional order systems. Math. Probl. Eng. [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization, Proceedings of IEEE International Conference on Neural Networks, Piscataway, NJ, USA, 27 November–1 December 1995; pp. 1942–1948.
- Yuan, L.G.; Yang, Q.G. Parameter identification and synchronization of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 305–316. [Google Scholar]
- Alfi, A.; Modares, H. System identification and control using adaptive particle swarm optimization. Appl. Math. Model. 2011, 35, 1210–1221. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—a simple and efficient heuristic for global optimization over continuous spaces. J. Global Optim 1997, 11, 341–359. [Google Scholar]
- Gao, F.; Fei, F.X.; Lee, X.J.; Tong, H.Q.; Deng, Y.F.; Zhao, H.L. Inversion mechanism with functional extrema model for identification incommensurate and hyper fractional chaos via differential evolution. Expert Syst. Appl. 2014, 41, 1915–1927. [Google Scholar]
- Tang, Y.G.; Zhang, X.Y.; Hua, C.C.; Li, L.X.; Yang, Y.X. Parameter identification of commensurate fractional-order chaotic system via differential evolution. Phys. Lett. A. 2012, 376, 457–464. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-TR06; Erciyes University: Kayseri, Turkey, October 2005. [Google Scholar]
- Karaboga, D.; Akay, B. A comparative study of artificail bee colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar]
- Karaboga, D.; Akay, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar]
- Biswas, S.; Das, S.; Debchoudhury, S.; Kundu, S. Co-evolving bee colonies by forager migration: A multi-swarm based Artificial Bee Colony algorithm for global search space. Appl. Math. Comput. 2014, 232, 216–234. [Google Scholar]
- Li, X.T.; Yin, M.H. Parameter estimation for chaotic systems by hybrid differential evolution algorithm and artificial bee colony algorithm. Nonlinear Dyn 2014, 77, 61–71. [Google Scholar]
- Zhang, W.; Wang, N.; Yang, S.P. Hybrid artificial bee colony algorithm for parameter estimation of proton exchange membrane fuel cell. Int. J. Hydrog. Energy. 2013, 38, 5796–5806. [Google Scholar]
- Tang, K.S.; Man, K.F.; Kwong, S.; He, Q. Genetic algorithms and their applications. IEEE Signal Proc. Mag. 1996, 13, 22–37. [Google Scholar]
- Price, K.V.; Storn, R.M.; Lampinen, J.A. Differential Evolution: A Practial Approach to Global Optimization; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn 2002, 29, 3–22. [Google Scholar]
- Gao, W.F.; Liu, S.Y. A modified artificial bee colony algorithm. Comput. Oper. Res. 2012, 39, 687–697. [Google Scholar]
- Zhu, G.P.; Kwong, S. Gbest-guided artificial bee colony algorithm for numerical function optimization. Appl. Math. Comput. 2010, 217, 3166–3173. [Google Scholar]
- Gao, W.F.; Liu, S.Y.; Huang, L.L. A global best artificial bee colony algorithm for global optimization. J. Comput. Appl. Math. 2012, 236, 2741–2753. [Google Scholar]
- Gao, W.F.; Liu, S.Y.; Huang, L.L. A novel artificial bee colony algorithm based on modified search equation and orthogonal learning. IEEE Trans. Cybern. 2013, 43, 1011–1024. [Google Scholar]
- Banharnsakun, A.; Achalakul, T.; Sirinaovakul, B. The best-so-far selection in artificial bee colony algorithm. Appl. Soft Comput 2010, 11, 2888–2901. [Google Scholar]
- Eberhart, R.C.; Shi, Y. Comparing inertia weights and constriction factors in particle swarm optimization, Proceedings of the 2000 Congress on Evolutionary Computation, San Diego, CA, USA, 16–19 July 2000; pp. 84–88.
- Petráš, I. Fractional-order chaotic systems. In Fractional-Order Nonlinear Systems: Modeling, Analysis and Simulation; Spring: Berlin/Heidelberg, Germany, 2011; pp. 103–184. [Google Scholar]
- Chen, W.C. Nonlinear dynamics and chaos in a fractional-order financial system. Chaos Soliton. Fract. 2008, 36, 1305–1314. [Google Scholar]
- Li, C.; Chen, G.R. Chaos and hyperchaos in the fractional-order Rössler equations. Physica A 2004, 341, 55–61. [Google Scholar]






| Algorithm | ABC | MABC | PSO | DE | |
|---|---|---|---|---|---|
| Best | α1 | 0.89999710751139 | 0.90000000000779 | 0.90000008734044 | 0.90000000839266 |
| 0.00000289 | 0.00000000000779 | 0.0000000873 | 0.0000000839 | ||
| α2 | 0.85000340425767 | 0.84999999974820 | 0.84999849834607 | 0.85000001554904 | |
| 0.00000340 | 0.000000000252 | 0.00000150 | 0.0000000155 | ||
| α3 | 0.95000109556663 | 0.95000000006606 | 0.94999815994424 | 0.94999999728649 | |
| 0.00000110 | 0.0000000000661 | 0.00000184 | 0.00000000271 | ||
| a | 1.00000824446713 | 1.00000000001685 | 0.99999940889994 | 0.99999991725828 | |
| 0.00000824 | 0.0000000000169 | 0.000000591 | 0.0000000827 | ||
| F | 0.000109 | 0.00000000381 | 0.0000496 | 0.00000150 | |
| Mean | α1 | 0.89999898839006 | 0.90000000009692 | 0.90000391181321 | 0.90000002685242 |
| 0.00000101 | 0.0000000000969 | 0.00000391 | 0.0000000269 | ||
| α2 | 0.84999200041440 | 0.84999999995773 | 0.84999584987409 | 0.85000004254726 | |
| 0.000008 | 0.0000000000423 | 0.00000415 | 0.0000000425 | ||
| α3 | 0.95001365433365 | 0.94999999979106 | 0.94999945817490 | 0.94999990594634 | |
| 0.0000137 | 0.000000000209 | 0.000000542 | 0.0000000941 | ||
| a | 0.99999960182130 | 0.99999999907077 | 0.99998842441733 | 1.00000002104131 | |
| 0.000000398 | 0.000000000929 | 0.0000116 | 0.0000000210 | ||
| F | 0.00110 | 0.0000000187 | 0.000136 | 0.00000441 | |
| Worst | α1 | 0.89986759049317 | 0.89999999754274 | 0.90001851000084 | 0.90000037757625 |
| 0.000132 | 0.00000000246 | 0.0000185 | 0.000000378 | ||
| α2 | 0.85024440008037 | 0.85000000709250 | 0.84998125561542 | 0.85000066521416 | |
| 0.000244 | 0.00000000709 | 0.0000187 | 0.000000665 | ||
| α3 | 0.95021128707672 | 0.94999999845907 | 0.94996909375371 | 0.94999907973644 | |
| 0.000211 | 0.00000000154 | 0.0000309 | 0.000000920 | ||
| a | 1.00043167262447 | 0.99999999647242 | 0.99993245642478 | 0.99999938116949 | |
| 0.000432 | 0.00000000353 | 0.0000675 | 0.000000619 | ||
| F | 0.00253 | 0.0000000626 | 0.000377 | 0.00000982 | |
| Algorithm | ABC | MABC | PSO | DE | |
|---|---|---|---|---|---|
| Best | α1 | 0.89999988336465 | 0.90000000000057 | 0.89999976800825 | 0.89999999997794 |
| 0.000000117 | 0.000000000000565 | 0.000000232 | 0.0000000000221 | ||
| α2 | 0.84999973045874 | 0.84999999999937 | 0.84999856019088 | 0.85000000023856 | |
| 0.000000270 | 0.000000000000635 | 0.00000144 | 0.000000000239 | ||
| α3 | 0.94998811621200 | 0.95000000005566 | 0.95012518289719 | 0.95000000987768 | |
| 0.0000119 | 0.0000000000557 | 0.000125 | 0.00000000988 | ||
| F | 0.0000666 | 0.0000000000405 | 0.0000828 | 0.0000000120 | |
| Mean | α1 | 0.90000227541788 | 0.89999999997784 | 0.89999581166110 | 0.89999999996680 |
| 0.00000228 | 0.0000000000222 | 0.00000419 | 0.0000000000332 | ||
| α2 | 0.85000037233112 | 0.85000000004318 | 0.85001036746114 | 0.84999999991562 | |
| 0.000000372 | 0.0000000000432 | 0.0000104 | 0.0000000000844 | ||
| α3 | 0.95037664105673 | 0.95000000056334 | 0.94957364204493 | 0.94999999450775 | |
| 0.000377 | 0.000000000563 | 0.000426 | 0.00000000549 | ||
| F | 0.000395 | 0.00000000328 | 0.000557 | 0.0000000234 | |
| Worst | α1 | 0.90002081204987 | 0.89999999989872 | 0.89994777622230 | 0.90000000092049 |
| 0.0000208 | 0.000000000101 | 0.0000522 | 0.000000000920 | ||
| α2 | 0.85002033675238 | 0.85000000049223 | 0.85012993522134 | 0.84999999861606 | |
| 0.0000203 | 0.000000000492 | 0.000130 | 0.00000000138 | ||
| α3 | 0.95205165177920 | 0.95000003505732 | 0.94352872137521 | 0.94999989275506 | |
| 0.00205 | 0.0000000351 | 0.00647 | 0.000000107 | ||
| F | 0.000781 | 0.0000000116 | 0.00279 | 0.0000000383 | |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, W.; Yu, Y.; Wang, S. Parameters Estimation of Uncertain Fractional-Order Chaotic Systems via a Modified Artificial Bee Colony Algorithm. Entropy 2015, 17, 692-709. https://0-doi-org.brum.beds.ac.uk/10.3390/e17020692
Hu W, Yu Y, Wang S. Parameters Estimation of Uncertain Fractional-Order Chaotic Systems via a Modified Artificial Bee Colony Algorithm. Entropy. 2015; 17(2):692-709. https://0-doi-org.brum.beds.ac.uk/10.3390/e17020692
Chicago/Turabian StyleHu, Wei, Yongguang Yu, and Sha Wang. 2015. "Parameters Estimation of Uncertain Fractional-Order Chaotic Systems via a Modified Artificial Bee Colony Algorithm" Entropy 17, no. 2: 692-709. https://0-doi-org.brum.beds.ac.uk/10.3390/e17020692