Marine Oil Slick Detection Based on Multi-Polarimetric Features Matching Method Using Polarimetric Synthetic Aperture Radar Data


Abstract
:1. Introduction
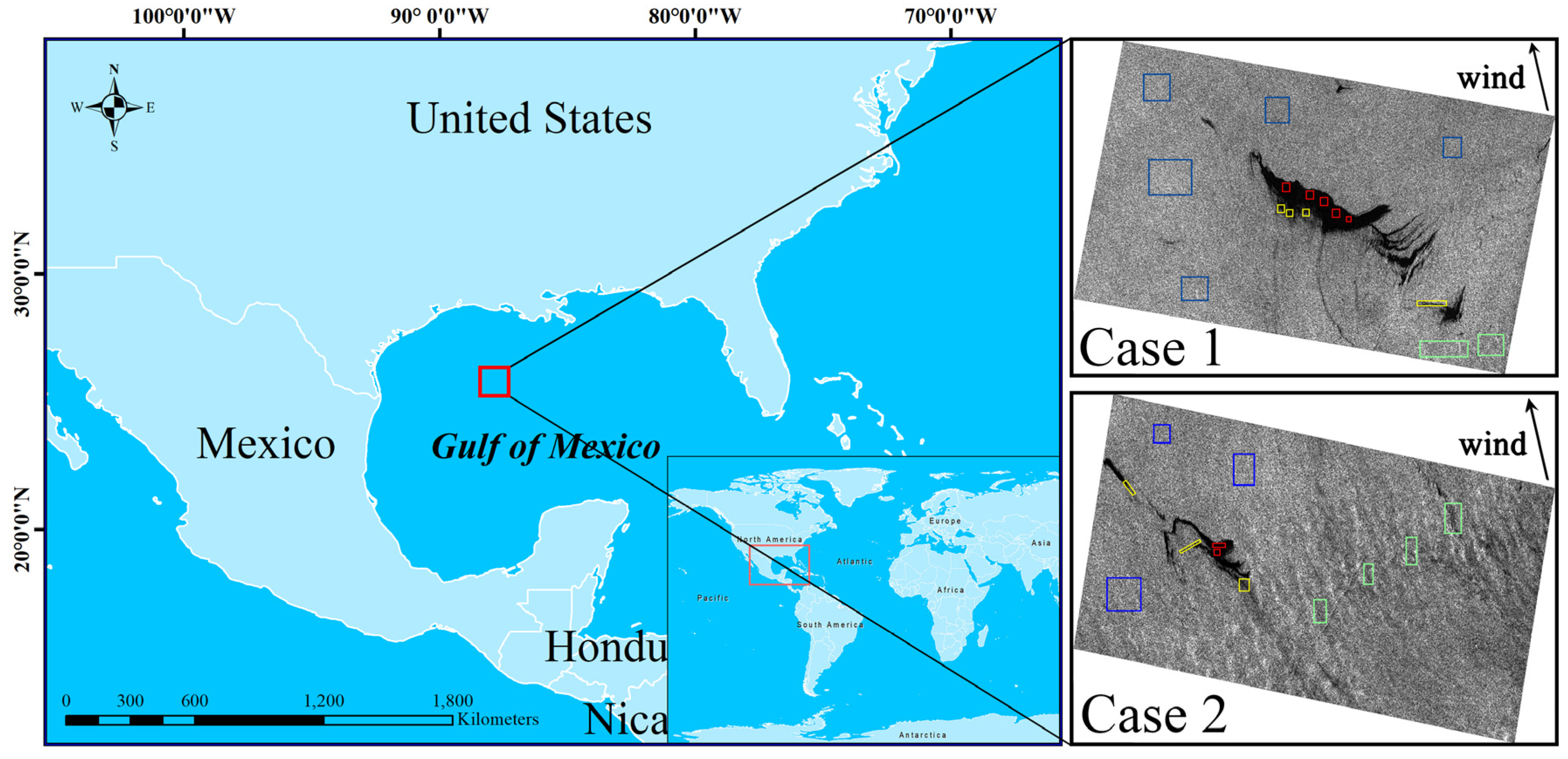
2. Experimental Dataset and Study Sites
2.1. Dataset Overview
2.2. Sample Data Acquisition
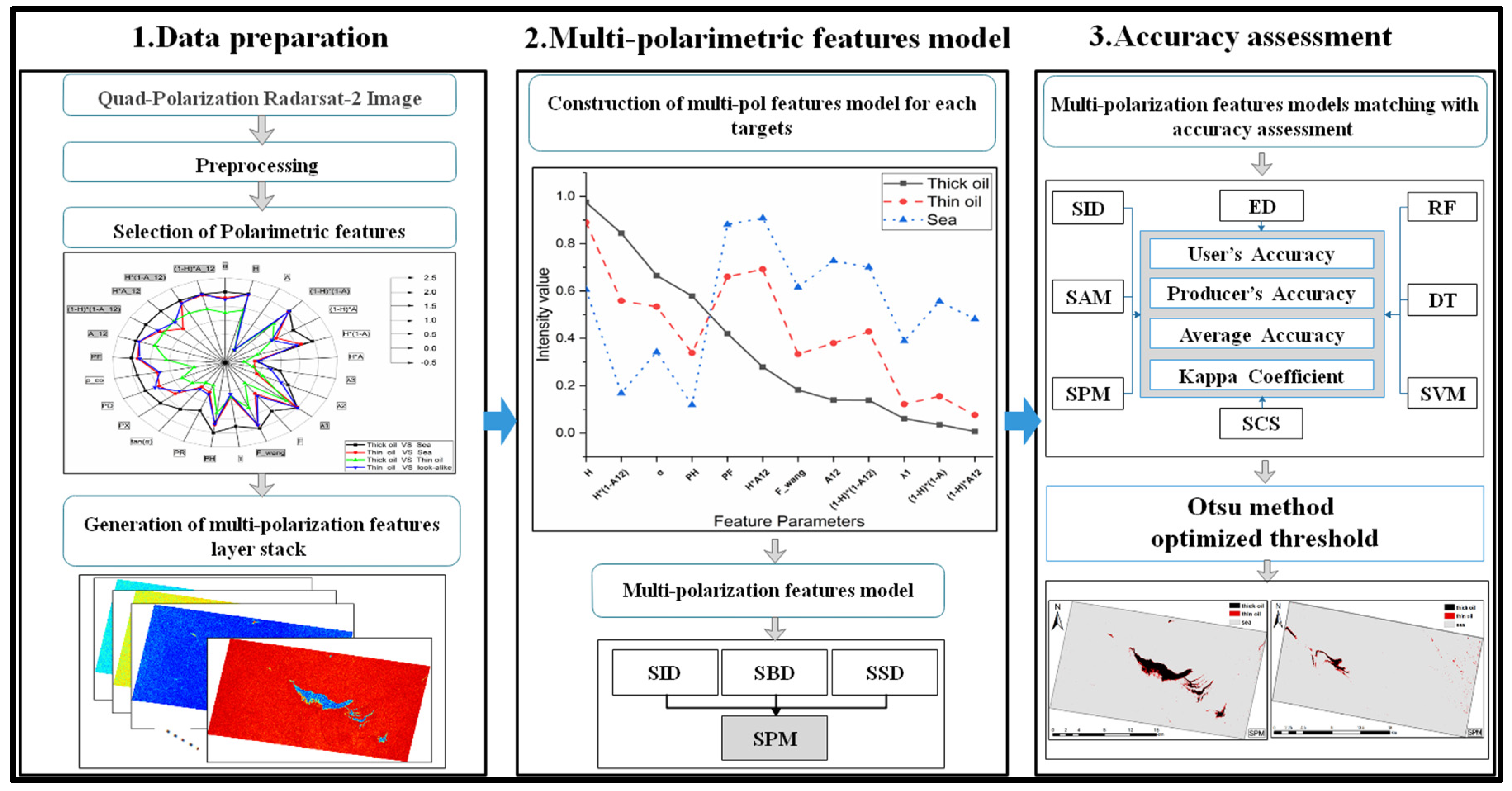
3. Methodology
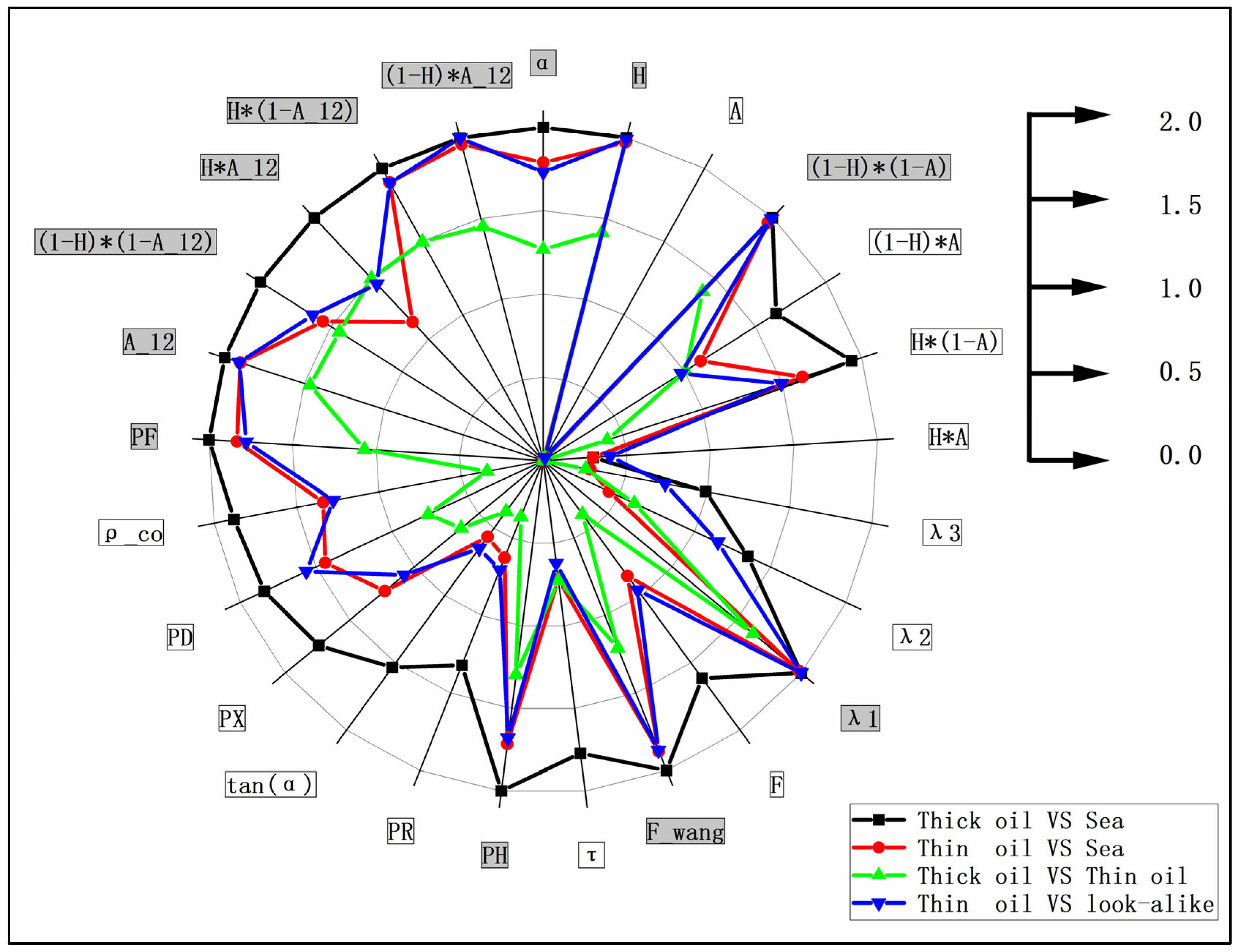
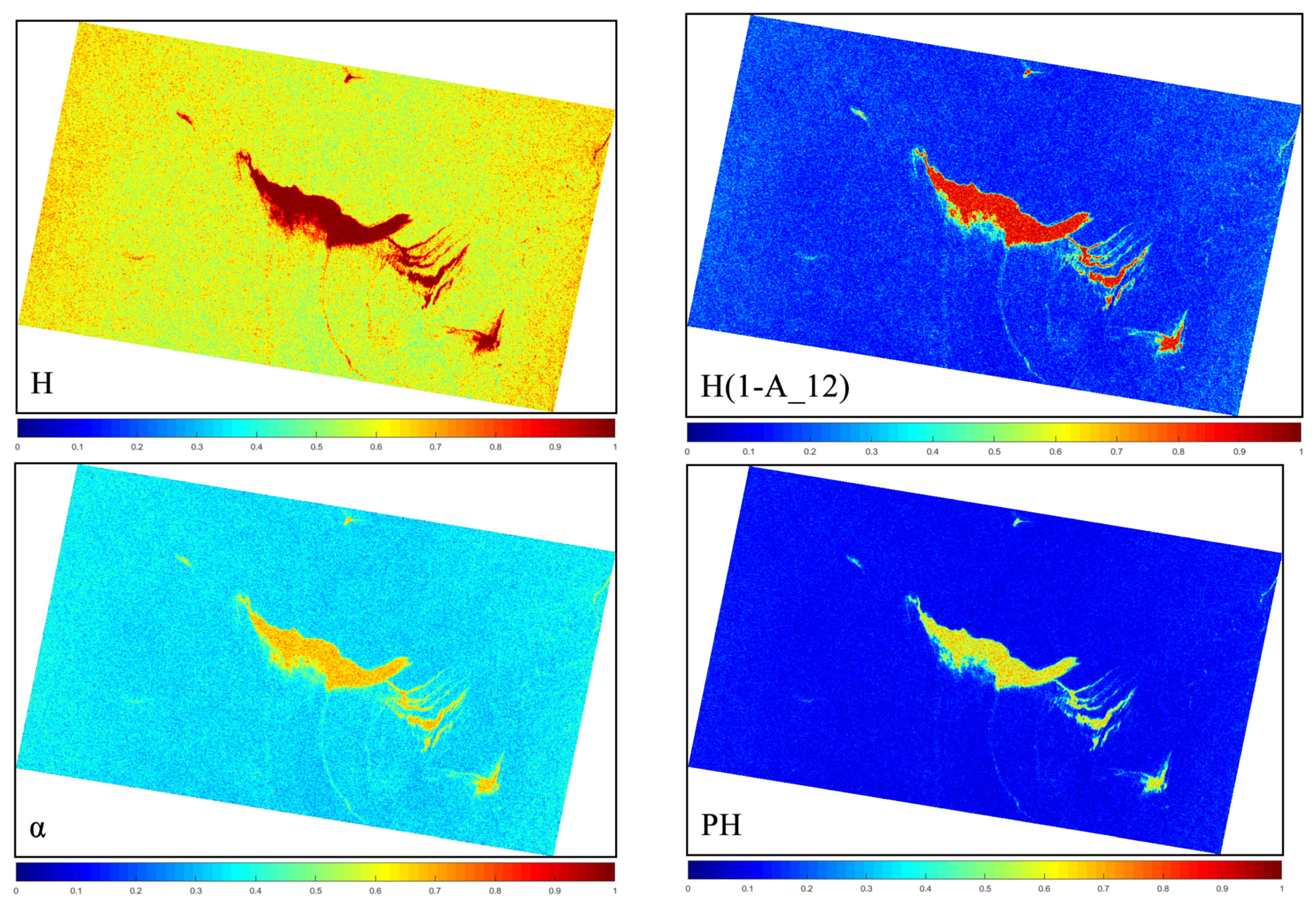
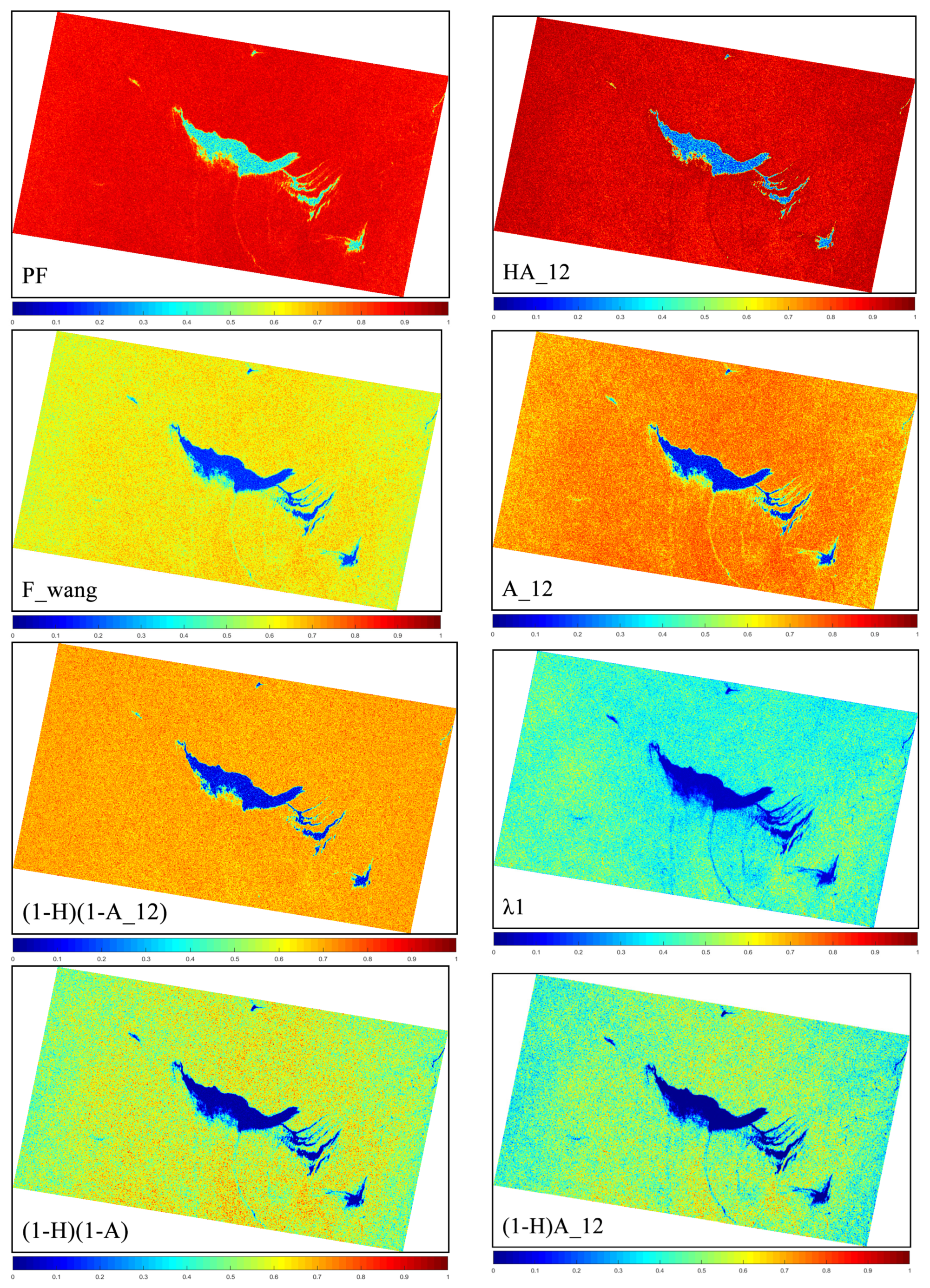
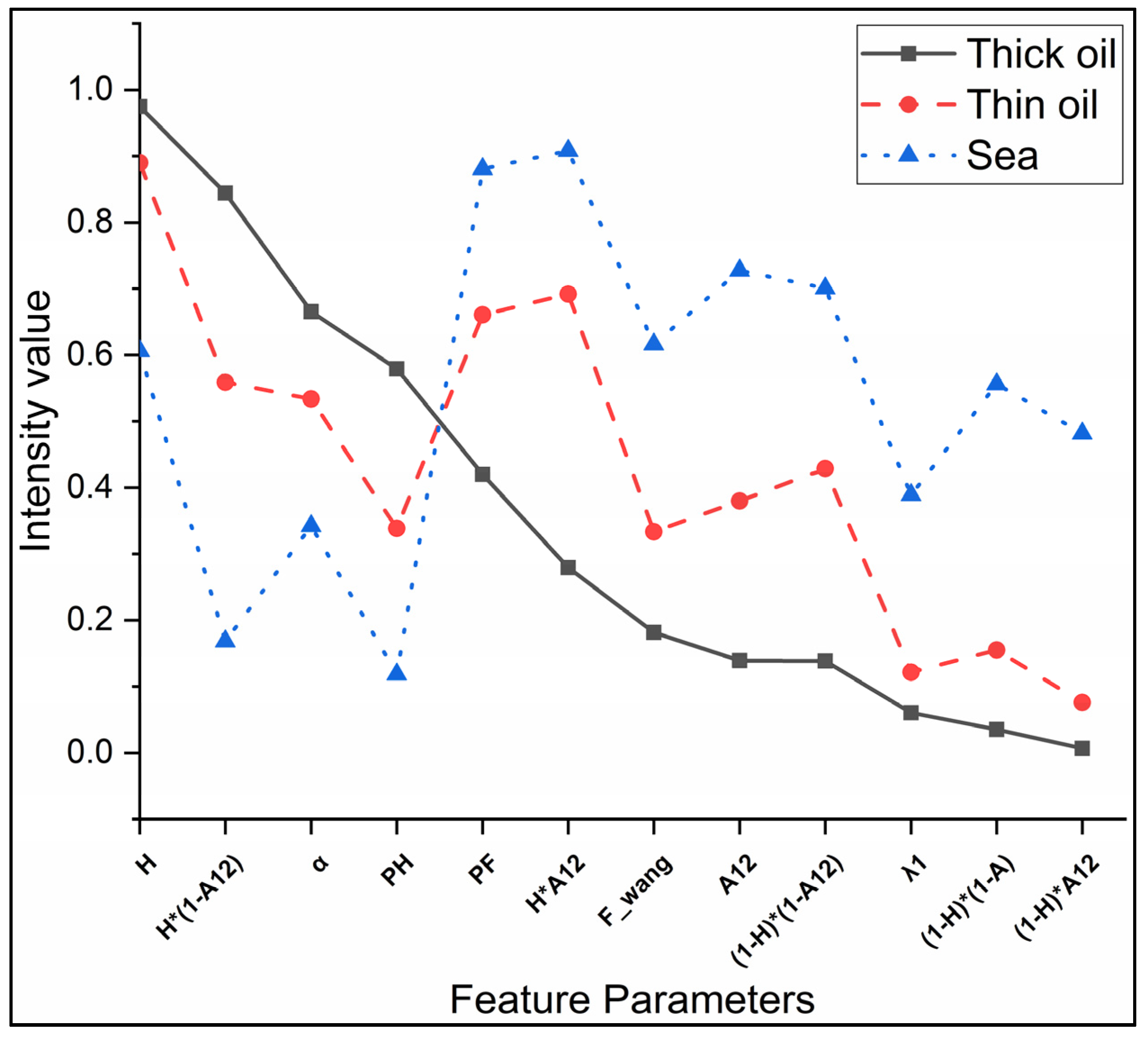
3.1. Extraction and Selection of Polarimetric Features for Marine Oil Spill Detection
3.2. Multi-Polarimetric Feature Model of Oil Slick Identification
- Get the average multi-polarimetric features curve of the target sample points (thick oil slick, for example) extracted from the image as the known reference curve, xi = (xi1, xi2, xi3, …, xiN)T
- Obtain the SPM result of the known reference curve and the whole categorizing images by the pixel-by-pixel similarity calculation.
- Calculate and obtain the optimal threshold by Otsu image segmentation method to extract the thick oil area with the highest similarity to their spectral vector size, spectral curve shape, and spectral information content.
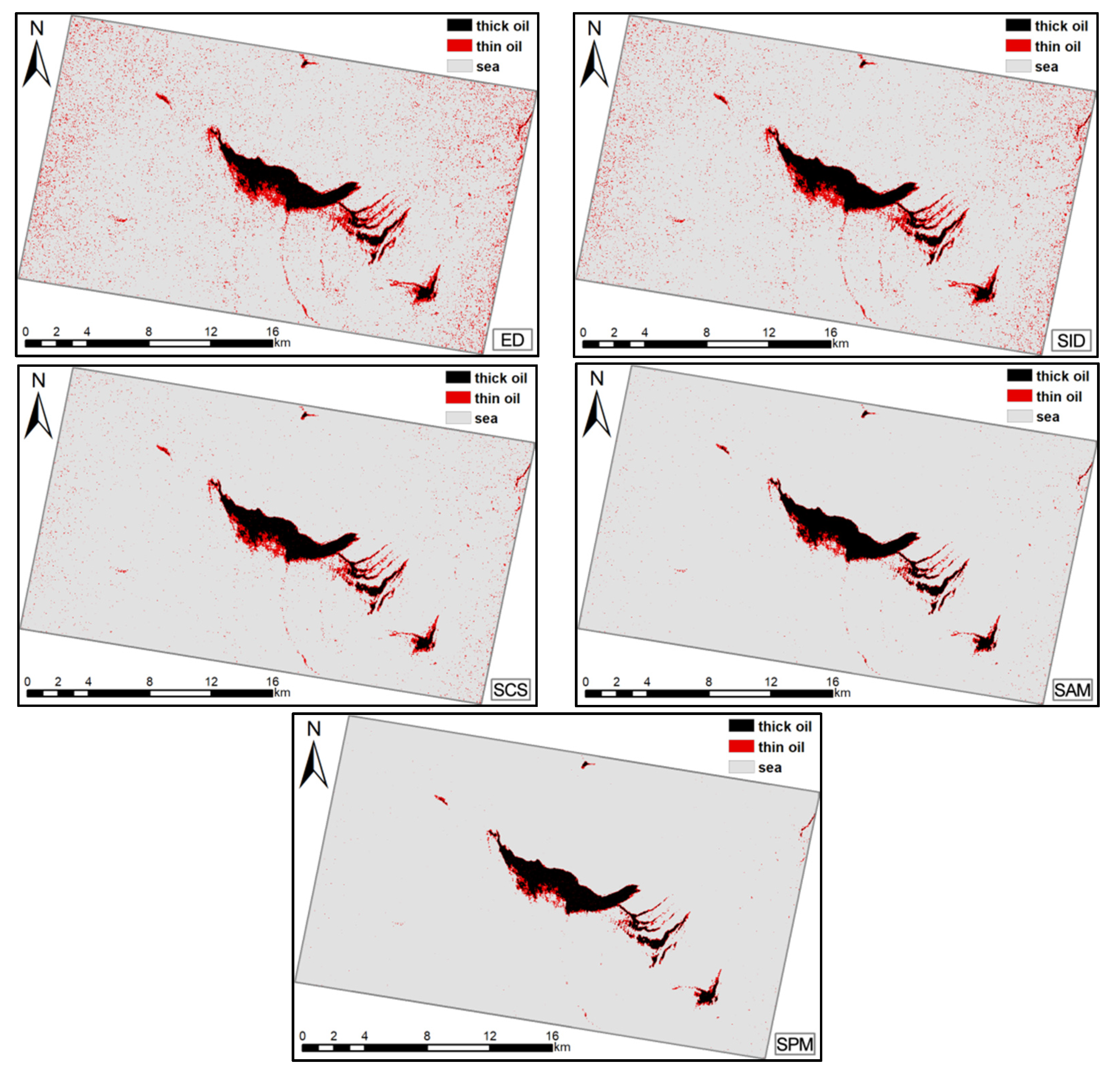
3.3. Comparison of Spectral Similarity Measures
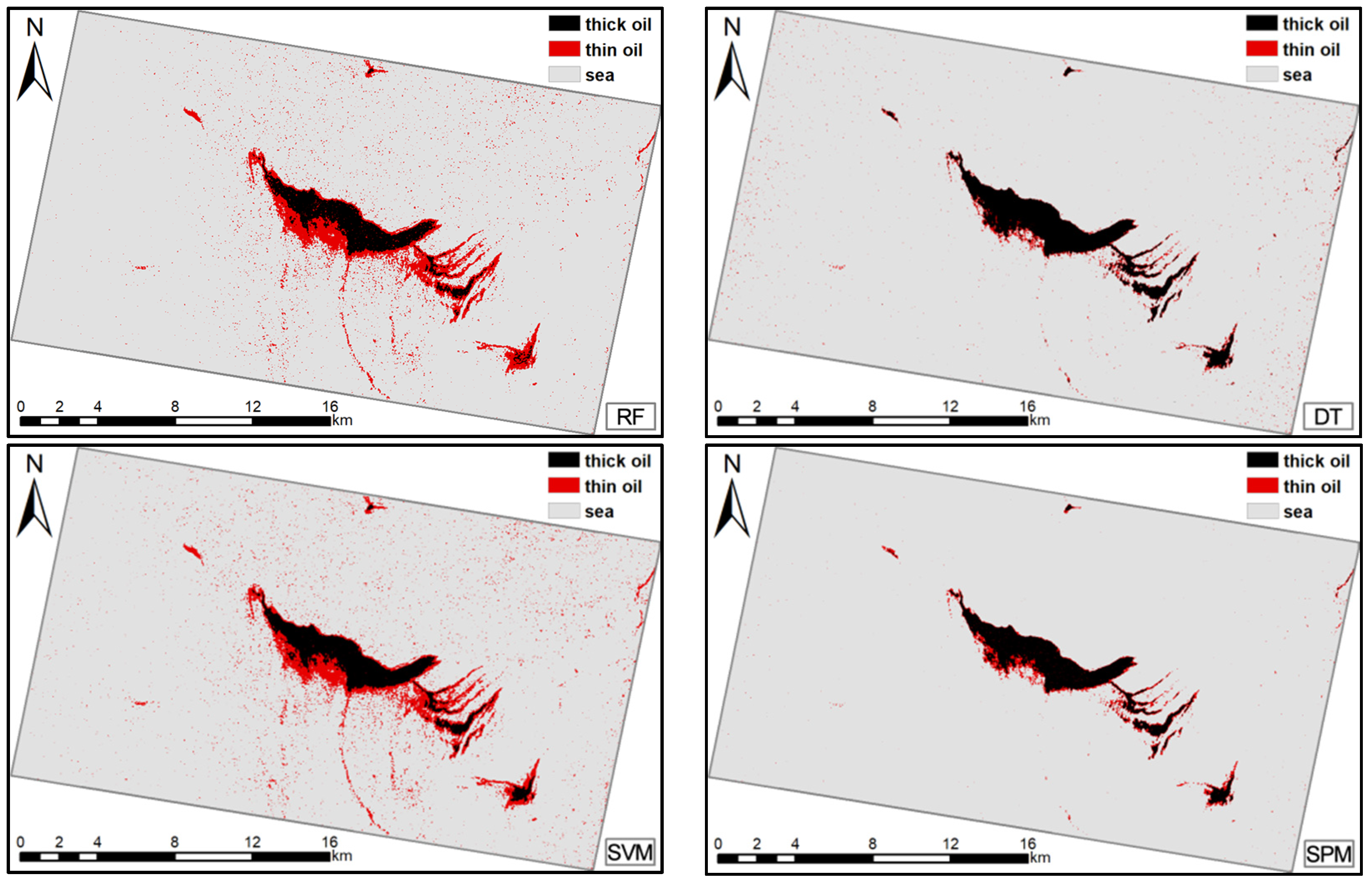
4. Results
5. Discussion
5.1. Analysis of the Oil Spill Detection Ability of the Proposed Method
5.2. Computational Complexity Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fingas, M.; Brown, C. A review of oil spill remote sensing. Sensors 2018, 2, 91. [Google Scholar]
- Li, G.; Li, Y.; Liu, B.; Hou, Y.; Fan, J. Analysis of Scattering Properties of Continuous Slow-Release Slicks on the Sea Surface Based on Polarimetric Synthetic Aperture Radar. ISPRS Int. J. Geo-Inf. 2018, 7, 237. [Google Scholar] [CrossRef]
- Kvenvolden, K.A.; Cooper, C.K. Natural seepage of crude oil into the marine environment. Geo-Mar. Lett. 2003, 3–4, 140–146. [Google Scholar] [CrossRef]
- Transportation Research Board and National Research Council. Oil in the Sea III: Inputs, Fates, and Effects; National Academies Press: Washington, DC, USA, 2003. [Google Scholar]
- DiGiacomo, P.M.; Washburn, L.; Holt, B. Coastal pollution hazards in southern California observed by SAR imagery: Stormwater plumes, wastewater plumes, and natural hydrocarbon seeps. Mar. Pollut. Bull. 2004, 11–12, 1013–1024. [Google Scholar] [CrossRef]
- Hu, C.; Li, X.; Pichel, W.G.; Muller-Karger, F.E. Detection of natural oil slicks in the NW Gulf of Mexico using MODIS imagery. Geophys. Res. Lett. 2009, 1, L01604. [Google Scholar] [CrossRef]
- Zhang, B.; Perrie, W.; Li, W.; Pichel, W.G. Mapping sea surface oil slicks using RADARSAT-2 quad-polarization SAR image. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Yang, H.J.; Pan, B.; Wu, W.F.; Tai, J.H. Field-based rice classification in Wuhua County through integration of multi-temporal sentinel-1a and Landsat-8 oli data. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 226–236. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; Holmes, J.; Rissing, M.; Jones, R.; Wobus, C.; Svejkovsky, J.; Hess, M. Detection of oil near shorelines during the Deepwater Horizon oil spill using synthetic aperture radar (SAR). Remote Sens. 2017, 6, 567. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Tranfaglia, M. SAR polarimetry to observe oil spills. IEEE Trans. Geosci. Remote Sens. 2007, 45, 506–511. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-Band synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2012, 10, 3812–3830. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Chen, J.; Zhang, H. Improved compact polarimetric SAR quad-pol reconstruction algorithm for oil spill detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1139–1142. [Google Scholar] [CrossRef]
- Souyris, J.C.; Imbo, P.; Fjortoft, R.; Mingot, S.; Lee, J.S. Compact polarimetry based on symmetry properties of geophysical media: The π/4 mode. IEEE Trans. Geosci. Remote Sens. 2005, 43, 634–646. [Google Scholar] [CrossRef]
- Raney, R.K. Hybrid-polarity SAR architecture. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3397–3404. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T. Characterization of marine surface slicks by Radarsat-2 multipolarization features. IEEE Trans. Geosci. Remote Sens. 2014, 9, 5302–5319. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Buono, A. SAR polarimetry for sea oil slick observation. Int. J. Remote Sens. 2015, 36, 3243–3273. [Google Scholar] [CrossRef]
- Latini, D.; Del Frate, F.; Jones, C.E. Multi-frequency and polarimetric quantitative analysis of the Gulf of Mexico oil spill event comparing different SAR systems. Remote Sens. Environ. 2016, 183, 26–42. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Yuan, Z.; Guo, H.; Pan, H.; Guo, J. Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data. Sustainability 2018, 10, 4408. [Google Scholar] [CrossRef]
- Buono, A.; Nunziata, F.; de Macedo, C.R.; Velotto, D.; Migliaccio, M. A sensitivity analysis of the standard deviation of the copolarized phase difference for sea oil slick observation. IEEE Trans. Geosci. 2018, 57, 2022–2030. [Google Scholar] [CrossRef]
- Pellon de Miranda, F.; Marmol, A.M.; Pedroso, E.C.; Beisl, C.H.; Welgan, P.; Morales, L.M. Analysis of RADARSAT-1 data for offshore monitoring activities in the Cantarell Complex, Gulf of Mexico, using the unsupervised semivariogram textural classifier (USTC). Can. J. Remote Sens. 2004, 30, 424–436. [Google Scholar] [CrossRef]
- Suresh, G.; Melsheimer, C.; Körber, J.H.; Bohrmann, G. Automatic estimation of oil seep locations in synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4218–4230. [Google Scholar] [CrossRef]
- Nunziata, F.; De Macedo, C.R.; Buono, A.; Velotto, D.; Migliaccio, M. On the analysis of a time series of X–band TerraSAR–X SAR imagery over oil seepages. Int. J. Remote Sens. 2019, 40, 3623–3646. [Google Scholar] [CrossRef]
- Li, H.; Perrie, W.; He, Y.; Wu, J.; Luo, X. Analysis of the polarimetric SAR scattering properties of oil-covered waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3751–3759. [Google Scholar] [CrossRef]
- Buono, A.; Nunziata, F.; Migliaccio, M.; Li, X. Polarimetric analysis of compact-polarimetry SAR architectures for sea oil slick observation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5862–5874. [Google Scholar] [CrossRef]
- Guo, H.; Wu, D.; An, J. Discrimination of Oil Slicks and Lookalikes in Polarimetric SAR Images Using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, H.; Wang, C.; Zhang, B.; Liu, M. Crop Classification Based on Temporal Information Using Sentinel-1 SAR Time-Series Data. Remote Sens. 2019, 11, 53. [Google Scholar] [CrossRef]
- Li, Y.; Cui, C.; Liu, Z.; Liu, B.; Xu, J.; Zhu, X.; Hou, Y. Detection and monitoring of oil spills using moderate/high-resolution remote sensing images. Arch. Environ. Contam. Toxicol. 2017, 73, 154–169. [Google Scholar] [CrossRef]
- Shu, N.; Gong, Y. A new spectral similarity measure based on multiple features integration. Spectrosc. Spect. Anal. 2011, 31, 2166–2170. [Google Scholar]
- Park, K.-A.; Park, J.-J.; Jang, J.-C.; Lee, J.-H.; Oh, S.; Lee, M. Multi-Spectral Ship Detection Using Optical, Hyperspectral, and Microwave SAR Remote Sensing Data in Coastal Regions. Sustainability 2018, 10, 4064. [Google Scholar] [CrossRef]
- Sweet, J.N. The Spectral Similarity Scale and Its Application to the Classification of Hyperspectral Remote Sensing Data. In Proceedings of the 2003 IEEE Workshop on Advances in Techniques for Analysis of Remotely Sensed Data, Greenbelt, MD, USA, 27–28 October 2003. [Google Scholar]
- Karathanassi, V. Spectral Unmixing Evaluation for Oil Spill Characterization. Int. J. Remote Sens. Appl. 2014, 4, 1–6. [Google Scholar] [CrossRef]
- Salem, F.; Kafatos, M. Hyperspectral Image Analysis for Oil Spill Mitigation. In Proceedings of the 22nd Asian Conference on Remote Sensing, Singapore, 5–9 November 2001; Volume 1, pp. 748–753. [Google Scholar]
- Hühnerfuss, H. Basic physicochemical principles of monomolecular sea slicks and crude oil spills. In Marine Surface Films; Gade, M., Hühnerfuss, H., Korenowski, G.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 21–35. [Google Scholar]
- Garcia-Pineda, O.; Zimmer, B.; Howard, M.; Pichel, W.; Li, X.; MacDonald, I.R. Using SAR images to delineate ocean oil slicks with a texture-classifying neural network algorithm (TCNNA). Can. J. Remote. Sens. 2009, 35, 411–421. [Google Scholar] [CrossRef]
- Jackson, C.R.; Apel, J.R. Synthetic Aperture Radar: Marine User’s Manual; US Department of Commerce, National Oceanic and Atmospheric Administration, National Environmental Satellite, Data, and Information Serve, Office of Research and Applications: Washington, DC, USA, 2004; pp. 81–115.
- Wismann, V.; Gade, M.; Alpers, W.; Huhnerfuss, H. Radar signatures of marine mineral oil spills measured by an airborne multi-frequency radar. Int. J. Remote Sens. 1998, 19, 3607–3623. [Google Scholar] [CrossRef]
- Gade, M.; Alpers, W.; Hühnerfuss, H.; Masuko, H.; Kobayashi, T. Imaging of biogenic and anthropogenic ocean surface films by the multifrequency/multipolarization SIR-C/X-SAR. J. Geophys. Res. Oceans 1998, 103, 18851–18866. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A.; Nunziata, F.; Shimada, M.; Isoguchi, O. The PALSAR polarimetric mode for sea oil slick observation. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4032–4041. [Google Scholar] [CrossRef]
- Velotto, D.; Migliaccio, M.; Nunziata, F.; Lehner, S. Dual-polarized TerraSAR-X data for oil-spill observation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4751–4762. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 2, 498–518. [Google Scholar] [CrossRef]
- Singha, S.; Ressel, R. Offshore platform sourced pollution monitoring using space-borne fully polarimetric C and X band synthetic aperture radar. Mar. Pollut. Bull. 2016, 112, 327–340. [Google Scholar] [CrossRef] [Green Version]
- Tong, S.; Liu, X.; Chen, Q.; Zhang, Z.; Xie, G. Multi-feature based ocean oil spill detection for polarimetric sar data using random forest and the self-similarity parameter. Remote Sens. 2019, 11, 451. [Google Scholar] [CrossRef] [Green Version]
- Dabboor, M.; Howell, S.; Shokr, M.; Yackel, J. The Jeffries–Matusita distance for the case of complex Wishart distribution as a separability criterion for fully polarimetric SAR data. Int. J. Remote Sens. 2014, 35, 6859–6873. [Google Scholar]
- Song, D.; Ding, Y.; Li, X.; Zhang, B.; Xu, M. Ocean Oil Spill Classification with RADARSAT-2 SAR Based on an Optimized Wavelet Neural Network. Remote Sens. 2017, 9, 799. [Google Scholar] [CrossRef] [Green Version]
- Nunziata, F.; Buono, A.; Migliaccio, M. COSMO–SkyMed Synthetic Aperture Radar data to observe the deep water horizon oil spill. Sustainability 2018, 10, 3599. [Google Scholar] [CrossRef] [Green Version]
- Padma, S.; Sanjeevi, S. Jeffries Matusita based mixed-measure for improved spectral matching in hyperspectral image analysis. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 138–151. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing Digital Image Analysis; Springer: Berlin/Heidelberg, Germany, 1999; Volume 3, pp. 56–59. [Google Scholar]
- Migliaccio, M.; Nunziata, F.; Brown, C.E.; Holt, B.; Li, X.; Pichel, W.; Shimada, M. Polarimetric synthetic aperture radar utilized to track oil spills. Eos Trans. Am. Geophys. Union 2012, 93, 161–162. [Google Scholar] [CrossRef]
- Espeseth, M.M.; Skrunes, S.; Jones, C.E.; Brekke, C.; Holt, B.; Doulgeris, A.P. Analysis of evolving oil spills in full-polarimetric and hybrid-polarity SAR. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4190–4210. [Google Scholar] [CrossRef] [Green Version]
- Skrunes, S.; Brekke, C.; Jones, C.E.; Espeseth, M.M.; Holt, B. Effect of wind direction and incidence angle on polarimetric SAR observations of slicked and unslicked sea surfaces. Remote Sens. Environ. 2018, 213, 73–91. [Google Scholar] [CrossRef]
- Liu, P.; Li, X.; Qu, J.J.; Wang, W.; Zhao, C.; Pichel, W. Oil spill detection with fully polarimetric UAVSAR data. Mar. Pollut. Bull. 2011, 62, 2611–2618. [Google Scholar] [CrossRef] [PubMed]
- Wenguang, W.; Fei, L.; Peng, W.; Jun, W. Oil spill detection from polarimetric SAR image. In Proceedings of the IEEE 10th International Conference on Signal Processing Proceedings, Beijing, China, 24–28 October 2010; pp. 832–835. [Google Scholar]
- Nunziata, F.; Migliaccio, M.; Gambardella, A. Pedestal height for sea oil slick observation. IET Radar Sonar Nav. 2011, 5, 103–110. [Google Scholar] [CrossRef]
- Nunziata, F.; Gambardella, A.; Migliaccio, M. A unitary Mueller-based view of polarimetric SAR oil slick observation. Int. J. Remote Sens. 2012, 33, 6403–6425. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Eltoft, T.; Kudryavtsev, V. Comparing near-coincident C-and X-band SAR acquisitions of marine oil spills. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1958–1975. [Google Scholar] [CrossRef]
- Kudryavtsev, V.N.; Chapron, B.; Myasoedov, A.G.; Collard, F.; Johannessen, J.A. On dual co-polarized SAR measurements of the ocean surface. IEEE Geosci. Remote Sens. Lett. 2012, 10, 761–765. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Jones, C.E.; Holt, B. A multisensor comparison of experimental oil spills in polarimetric SAR for high wind conditions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4948–4961. [Google Scholar] [CrossRef] [Green Version]
- Buono, A.; de Macedo, C.; Nunziata, F.; Velotto, D.; Migliaccio, M. Analysis on the Effects of SAR Imaging Parameters and Environmental Conditions on the Standard Deviation of the Co-Polarized Phase Difference Measured over Sea Surface. Remote Sens. 2019, 11, 18. [Google Scholar] [CrossRef] [Green Version]
- Angelliaume, S.; Dubois-Fernandez, P.C.; Jones, C.E.; Holt, B.; Minchew, B.; Amri, E.; Miegebielle, V. SAR Imagery for Detecting Sea Surface Slicks: Performance Assessment of Polarization-Dependent Parameters. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4237–4257. [Google Scholar] [CrossRef] [Green Version]
- Matkan, A.A.; Hajeb, M.; Azarakhsh, Z. Oil spill detection from SAR image using SVM based classification. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Tehran, Iran, 5–8 October 2013; Volume XL-1/W3. [Google Scholar]
- Shao, Y.; Lunetta, R.S. Comparison of support vector machine, neural network, and cart algorithms for the land-cover classification using limited training data points. ISPRS J. Photogramm. Remote Sens. 2012, 70, 78–87. [Google Scholar] [CrossRef]
- Topouzelis, K.; Psyllos, A. Oil spill feature selection and classification using decision tree forest on SAR image data. ISPRS J. Photogramm. Remote Sens. 2012, 68, 135–143. [Google Scholar] [CrossRef]
- Hosseini, R.S.; Homayouni, S.; Safari, R. Modified algorithm based on support vector machines for classification of hyperspectral images in a similarity space. J. Appl. Remote Sens. 2012, 6, 063550. [Google Scholar] [CrossRef]
- Belgiu, M.; Dr˘agu¸t, L. Random Forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | RADARSAT-2 |
|---|---|
| Owner/Operator | CSA/MDA |
| Date | 8 May 2010 |
| Time (UTC) | 12:01 a.m. |
| Mode/Product/Polarization | Fine Quad-Pol mode SLC (HH, HV, VH, VV) |
| Centre Frequency | C-band 5.405 GHz |
| Slicks present | Natural Crude Oil Seeps |
| Resolution (Rg × Az) | 5.2 × 7.6 (m) |
| Pixel space (Rg × Az) | 4.7 × 5.1 (m) |
| Polarimetric Feature | Definition | For Oil | For Sea Surface | References |
|---|---|---|---|---|
| Alpha (α) | α = P1α1 + P2α2 + P3α3, | Higher | Lower | [11,16,41] |
| Entropy (H) | Higher | Lower | [11,16,41,50] | |
| Anisotropy (A) | Higher | Lower | [11,15,41] | |
| Combination of H and A | (1 − H)*(1 − A) | Lower | Higher | [41] |
| (1 − H)*A | Lower | Higher | ||
| H*(1 − A) | Higher | Lower | ||
| H*A | Higher | Lower | ||
| Eigenvalues of coherence matrix | λ1 () | Lower | Higher | [11,51,52] |
| λ2 | Lower | Higher | [11,51] | |
| λ3 | Lower | Higher | [11,51] | |
| Anisotropy12 (A_12) | Lower | Higher | [2,15] | |
| Combination of H and A_12 | (1 − H)*(1 − A12) | Lower | Higher | [2] |
| H*A12 | Lower | Higher | ||
| H*(1 − A12) | Higher | Lower | ||
| (1 − H)*A12 | Lower | Higher | ||
| F | F = [H + A + ρCO + α] | Higher | Lower | [53] |
| F_wang | F_wang = [(1 − H) + (1 − α) + A12 + ρCO]/4 | Lower | Higher | [54] |
| Surface Scattering Fraction (τ) | Lower | Higher | [43] | |
| Pedestal Height (PH) | Higher | Lower | [41,55,56] | |
| Co-polarization Ratio (PR) | PR= SVV2/SHH2 | Higher | Lower | [15,38,41,42] |
| tan(α) | ϕi: incidence angle εr: dielectric constant | Lower | Higher | [11,41] |
| Cross-polarization ratio (PX) | Higher | Lower | [51] | |
| Polarization Difference (PD) | PD = SVV2 − SHH2 | Lower | Higher | [51,52,57,58] |
| The Magnitude of Correlation Coefficient (ρ_co) | Lower | Higher | [15,39,51,52,54] | |
| Polarisation_Fraction (PF) | Lower | Higher | [41,51] |
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| ED | PA (%) | 98.77 | 51.43 | 98.51 |
| UA (%) | 86.76 | 24.65 | 99.86 | |
| AA (%) | 76.66 | |||
| Kappa | 0.7348 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SCS | PA (%) | 95.83 | 63.68 | 99.26 |
| UA (%) | 92.41 | 42.59 | 99.82 | |
| AA (%) | 82.265 | |||
| Kappa | 0.8250 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SID | PA (%) | 97.27 | 66.40 | 97.10 |
| UA (%) | 90.64 | 17.80 | 99.89 | |
| AA (%) | 78.18 | |||
| Kappa | 0.6304 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SAM | PA (%) | 97.66 | 49.06 | 99.76 |
| UA (%) | 89.98 | 62.11 | 99.75 | |
| AA (%) | 83.05 | |||
| Kappa | 0.8737 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SPM | PA (%) | 96.03 | 44.36 | 99.95 |
| UA (%) | 91.83 | 75.53 | 99.65 | |
| AA (%) | 84.55 | |||
| Kappa | 0.8855 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SPM | PA (%) | 96.03 | 44.36 | 99.95 |
| UA (%) | 91.83 | 75.53 | 99.65 | |
| AA (%) | 84.55 | |||
| Kappa | 0.8855 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| RF | PA (%) | 90.66 | 88.43 | 98.83 |
| UA (%) | 95.78 | 33.10 | 99.88 | |
| AA (%) | 84.4 | |||
| Kappa | 0.807 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SVM | PA (%) | 94.38 | 83.77 | 98.45 |
| UA (%) | 95.07 | 32.52 | 99.95 | |
| AA (%) | 84.02 | |||
| Kappa | 0.7601 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| DT | PA (%) | 99.98 | 22.26 | 99.64 |
| UA (%) | 84.52 | 33.13 | 99.87 | |
| AA (%) | 73.23 | |||
| Kappa | 0.8592 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SPM | PA (%) | 79.04 | 17.67 | 99.60 |
| UA (%) | 97.70 | 29.22 | 98.70 | |
| AA (%) | 70.32 | |||
| Kappa | 0.6008 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| RF | PA (%) | 95.59 | 61.28 | 80.51 |
| UA (%) | 72.87 | 28.02 | 92.65 | |
| AA (%) | 71.81 | |||
| Kappa | 0.55 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| SVM | PA (%) | 67.14 | 32.01 | 98.22 |
| UA (%) | 97.1 | 18.68 | 98.91 | |
| AA (%) | 68.77 | |||
| Kappa | 0.4945 | |||
| Class | Thick Oil | Thin Oil | Seawater | |
| Accuracy | ||||
| DT | PA (%) | 82.70 | 21.80 | 98.56 |
| UA (%) | 96.46 | 21.74 | 98.88 | |
| AA (%) | 70.02 | |||
| Kappa | 0.5472 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Li, Y.; Liu, B.; Wu, P.; Chen, C. Marine Oil Slick Detection Based on Multi-Polarimetric Features Matching Method Using Polarimetric Synthetic Aperture Radar Data. Sensors 2019, 19, 5176. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235176
Li G, Li Y, Liu B, Wu P, Chen C. Marine Oil Slick Detection Based on Multi-Polarimetric Features Matching Method Using Polarimetric Synthetic Aperture Radar Data. Sensors. 2019; 19(23):5176. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235176
Chicago/Turabian StyleLi, Guannan, Ying Li, Bingxin Liu, Peng Wu, and Chen Chen. 2019. "Marine Oil Slick Detection Based on Multi-Polarimetric Features Matching Method Using Polarimetric Synthetic Aperture Radar Data" Sensors 19, no. 23: 5176. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235176