A Novel Fuzzy-Adaptive Extended Kalman Filter for Real-Time Attitude Estimation of Mobile Robots

 ,
,  ,
,
Abstract
:1. Introduction
1.1. Survey on Attitude Estimation
- The first impact is related to the flexibility of the implemented algorithm (i.e., the observation models, equations defining the filter dynamics, and noise models jointly define the algorithm).
- The filter performance heavily depends on properly selected filter gains (i.e., noise covariance matrices). In general, the statistics of system noise cannot be determined; moreover, external disturbances cause radical measurement noise during attitude realization, which make the assumed noise models inappropriate. As a result, the filter parameters are usually selected based on both experimental and engineering intuition, which result in a compromise between the accuracy and filter dynamics. To enhance the filter performance, numerical optimization-based filter tuning has been performed [1,14,40,57].
- The papers above show that the common methods used to deal with external disturbances (dynamic motions and magnetic perturbations) either work by the application of intelligent adaptive strategies that on-the-fly modify the vector observation methods, filter gains, and covariance matrices; or the compensation is maintained with additional dynamic models that well-mimic the effects of the external forces and magnetic fluctuations.
1.2. Contribution of the Paper
- Formulating a novel quaternion-based FAEKF structure that incorporates the magnitudes of vibration, external acceleration, and magnetic perturbation by a sophisticated heuristic knowledge-based fuzzy inference machine to provide robust attitude estimation in both static and dynamic environments.
- Designing a 6 DOF test platform which enables both the execution of various dynamic (vibrating and accelerating) behaviors in the three-dimensional space and the measurement of true attitude angles along with the raw MARG data. An additional part of the test environment is a novel magnetic perturbation algorithm. This test environment contributes to the successful evaluation of state estimation quality.
- Performing numerical optimization-aided tuning of filter parameters based on the collected training measurements in the test environment.
- Providing a free-to-use Robot Operating System (ROS) package that enables both the generation of MARG-based measurements and the testing of filter performances. We made this package publicly available on our website [58], with the aim of helping other laboratory teams with both performing and developing similar experiments.
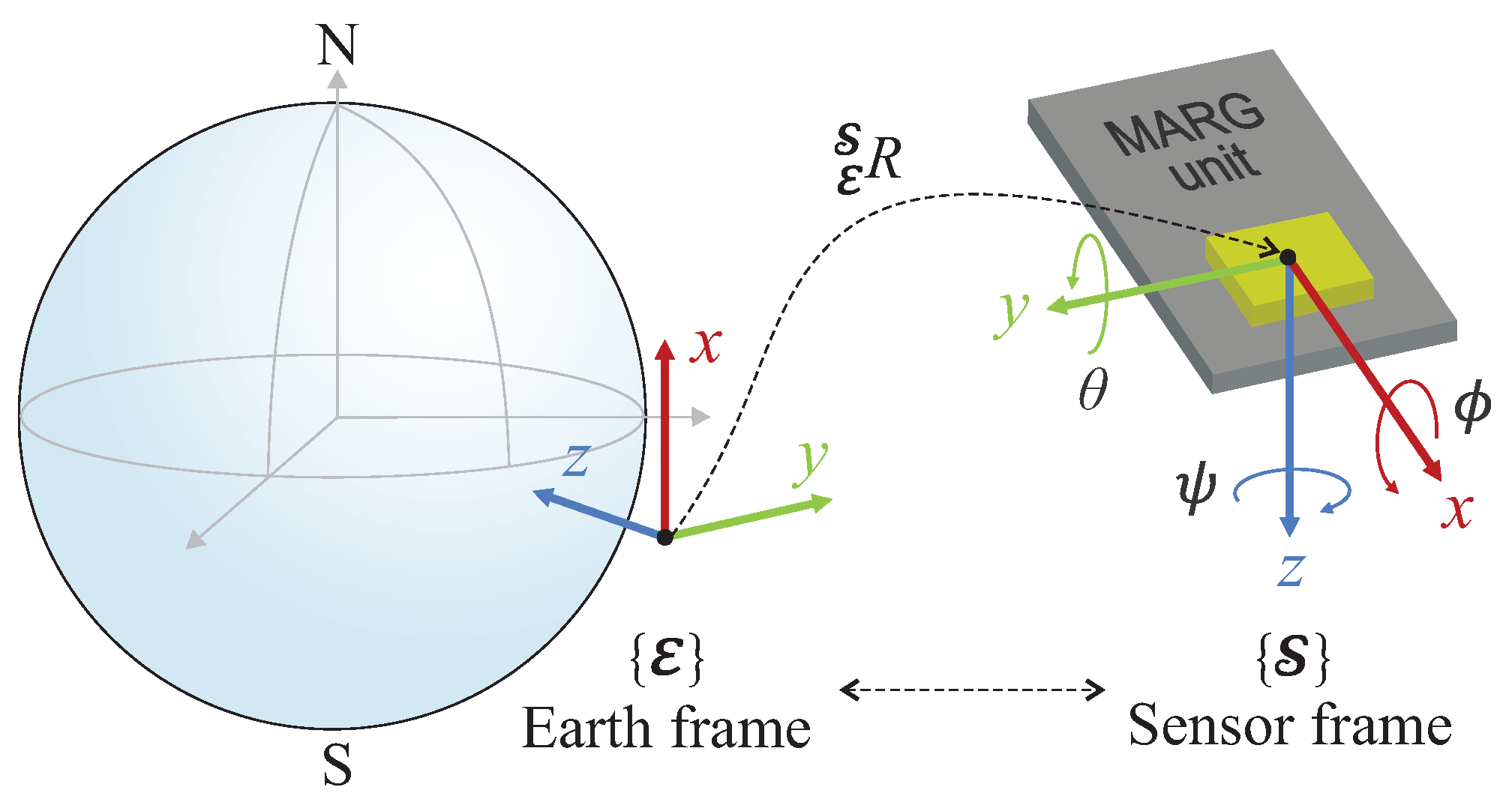
2. Quaternion-Based Attitude Formulation
3. Attitude Estimation with MEMS MARG Sensors
3.1. Gyroscope Model
3.2. Accelerometer and Magnetometer Models
3.3. Attitude Estimation with Extended Kalman Filter
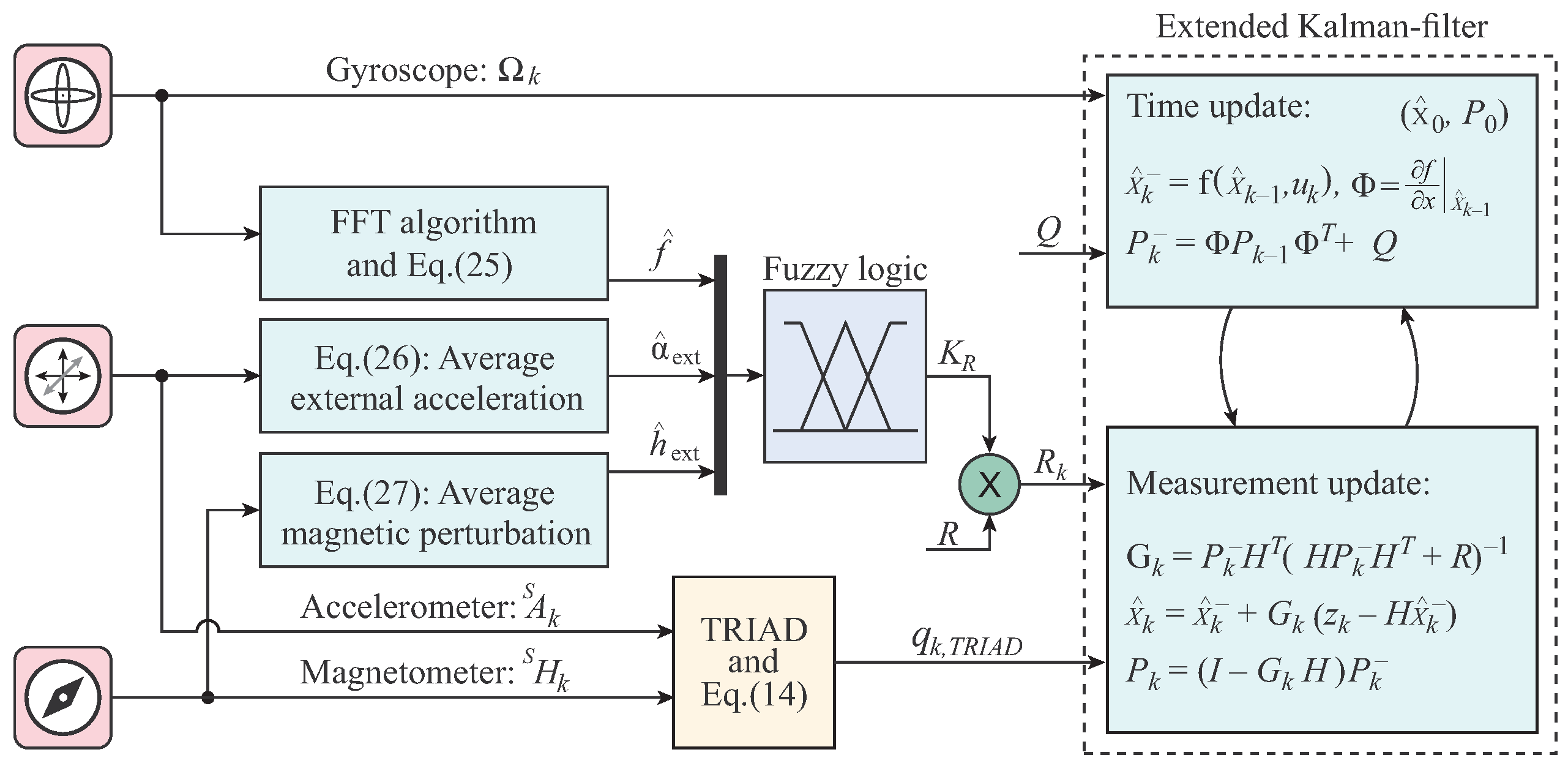
4. Fuzzy-Adaptive Strategy
4.1. Measuring Vibration Magnitude
- Collect a measurement packet x from the angular rate readings.
- Obtain frequency domain information about the instantaneous vibration by calculating the discrete Fourier transform of x. Let denote the output of FFT, where and represent the frequency components and amplitudes, respectively. The transform of length is calculated asand the output is given by
- Obtain the oscillation frequency estimate by finding the highest-intensity frequency component, such thatwhere denotes the maximum oscillation frequency the system is expected to be exposed to, while the threshold rate magnitude cuts off the noise in the aforementioned evaluation.
4.2. Measuring External Acceleration and Magnetic Perturbation Magnitudes
4.3. Fuzzy Inference Machine
- IF the sensor frame stays in stationary (non-accelerating and non-perturbed) mode, THEN a well-chosen ratio between the noise covariances Q and R yields satisfactory state estimation performance.
- As the external disturbance effects are absorbed by the measurement noise in Equation (17), IF vibration, external acceleration, and magnetic perturbations disturb the MARG-based attitude realization, THEN the measurement noise covariance R should be increased according to the intensity of the measures , , and (i.e., higher noise variance characterizes the attitude realization with higher uncertainty).
- IF the oscillation frequency is zero (Z) and the external acceleration and magnetic perturbation magnitudes are big (B), THEN a fairly large scaling factor () is applied for the measurement noise covariance. This collocation of the system state means that the observation is expected to have rather large uncertainty and, therefore, the algorithm relies more heavily on the state propagation (left side, second row, second column).
- IF is small (S) and the and measures are close to zero (Z), THEN a smaller weight of is applied for R. Therefore, the algorithm considers the observation with higher reliability and maintains the correction of the state propagation by processing the measurements with higher significance (middle, first row, first column).
- Fuzzification of the observation vector and calculation of the firing values of the rule (). Let denote the dimension of the observation vector (), then the firing value represents the fitting degree of the observation to the antecedent fuzzy set in the dimension of the rule aswhere is the fuzzified observation, moreover, and denote the mean and standard deviation of the Gaussian function antecedent defined in the dimension of the rule.
- Calculation of the applicability measure of the rule, denoted by , as the minimum of the aforementioned firing values. This weight determines the significance of the consequent fuzzy set defined in the rule.
- Computation of the crisp output K as the weighted average over all rule outputs:
5. Experimental Validation
5.1. Test Environment
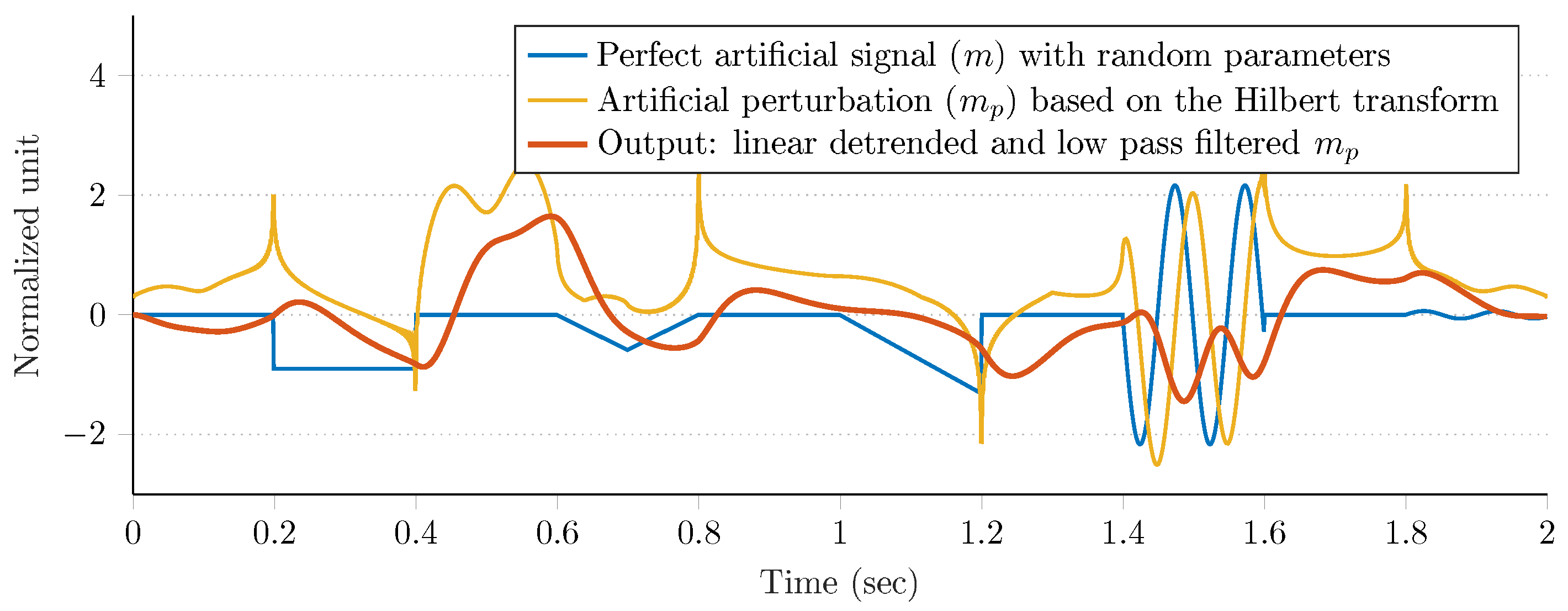
Magnetic Perturbations
- Generate a perfect artificial signal m of length as a mixture of square, saw-tooth, triangle, and two sinusoidal signals. Both the sequence of these signals and their parameters (i.e., the amplitude and frequency) are randomly selected.
- Obtain the analytic signal from m, where the real part is the original signal, while the imaginary part contains the Hilbert transform (i.e., the original signal with a phase shift [78]). Then, generate the artificial perturbation as the sum of the imaginary part and absolute value of the Hilbert transformed complex signal, where the sequence of absolute values is reversed in time:
- Remove the continuous linear trend of and low-pass filter the detrended signal with a first order Butterworth infinite impulse response (IIR) filter.
5.2. Tuning of Filter Parameters
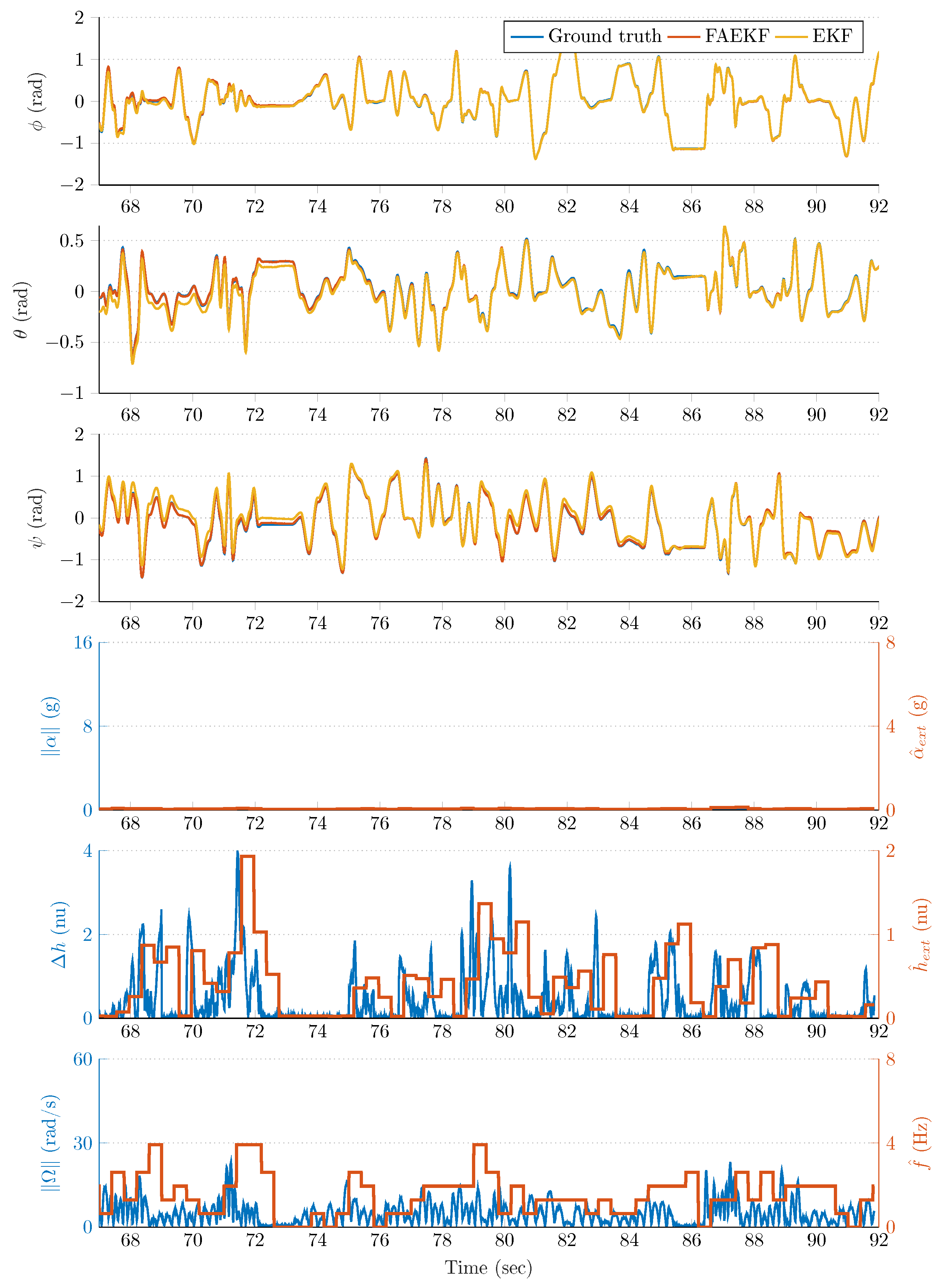
5.3. Results
- Employing a more robust deterministic approach to determine the quaternion from accelerometer and magnetometer observations in the measurement update state of the EKF.
- Partitioning the fuzzy inputs and outputs into additional fuzzy sets, thereby implementing a more advanced fuzzy inference system.
- Tuning the shapes of the applied fuzzy sets, the ranges of input and output variables, and the weights of the IF-THEN rules with the aid of optimization.
- Varying the window size in the determination of external disturbance magnitudes, thereby providing more accurate measures for the adaptation laws.
- Extending the state space model with external acceleration and magnetic perturbation models, where the driving Gaussian variables vary according to the external disturbance magnitudes.
- Applying an additional output in the fuzzy inference system which weights the process noise covariance matrix.
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Odry, Á.; Fullér, R.; Rudas, I.J.; Odry, P. Kalman filter for mobile-robot attitude estimation: Novel optimized and adaptive solutions. Mech. Syst. Signal Process. 2018, 110, 569–589. [Google Scholar] [CrossRef]
- Wen, X.; Liu, C.; Huang, Z.; Su, S.; Guo, X.; Zuo, Z.; Qu, H. A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation. Sensors 2019, 19, 1340. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roh, M.S.; Kang, B.S. Dynamic Accuracy Improvement of a MEMS AHRS for Small UAVs. Int. J. Precis. Eng. Manuf. 2018, 19, 1457–1466. [Google Scholar] [CrossRef]
- Battiston, A.; Sharf, I.; Nahon, M. Attitude estimation for collision recovery of a quadcopter unmanned aerial vehicle. Int. J. Robot. Res. 2019, 38, 1286–1306. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Lyu, P.; Lai, J.; Yuan, C.; Wang, B. A fault-tolerant attitude estimation method for quadrotors based on analytical redundancy. Aerosp. Sci. Technol. 2019, 93, 105290. [Google Scholar] [CrossRef]
- Ahmad, I.; El Hadri, A.; Benziane, L.; Benallegue, A. Globally asymptotic attitude estimation for accelerated aerial vehicles. Aerosp. Sci. Technol. 2019, 84, 1175–1181. [Google Scholar] [CrossRef]
- Wilson, S.; Eberle, H.; Hayashi, Y.; Madgwick, S.O.; McGregor, A.; Jing, X.; Vaidyanathan, R. Formulation of a new gradient descent MARG orientation algorithm: Case study on robot teleoperation. Mech. Syst. Signal Process. 2019, 130, 183–200. [Google Scholar] [CrossRef]
- Dai, F.; Gao, X.; Jiang, S.; Guo, W.; Liu, Y. A two-wheeled inverted pendulum robot with friction compensation. Mechatronics 2015, 30, 116–125. [Google Scholar] [CrossRef]
- Baldi, T.L.; Farina, F.; Garulli, A.; Giannitrapani, A.; Prattichizzo, D. Upper Body Pose Estimation Using Wearable Inertial Sensors and Multiplicative Kalman Filter. IEEE Sens. J. 2019, 20, 492–500. [Google Scholar] [CrossRef] [Green Version]
- Duraffourg, C.; Bonnet, X.; Dauriac, B.; Pillet, H. Real Time Estimation of the Pose of a Lower Limb Prosthesis from a Single Shank Mounted IMU. Sensors 2019, 19, 2865. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Xiao, W. A Fuzzy Tuned and Second Estimator of the Optimal Quaternion Complementary Filter for Human Motion Measurement with Inertial and Magnetic Sensors. Sensors 2018, 18, 3517. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Zhang, L.; Qiu, S.; Wang, Z.; Yang, N.; Xu, J. Pedestrian dead reckoning using pocket-worn smartphone. IEEE Access 2019, 7, 91063–91073. [Google Scholar] [CrossRef]
- Michel, T.; Genevès, P.; Fourati, H.; Layaïda, N. Attitude estimation for indoor navigation and augmented reality with smartphones. Pervasive Mob. Comput. 2018, 46, 96–121. [Google Scholar] [CrossRef] [Green Version]
- Gośliński, J.; Nowicki, M.; Skrzypczyński, P. Performance comparison of EKF-based algorithms for orientation estimation on Android platform. IEEE Sens. J. 2015, 15, 3781–3792. [Google Scholar] [CrossRef]
- Jouybari, A.; Amiri, H.; Ardalan, A.A.; Zahraee, N.K. Methods comparison for attitude determination of a lightweight buoy by raw data of IMU. Measurement 2019, 135, 348–354. [Google Scholar] [CrossRef]
- Nourmohammadi, H.; Keighobadi, J. Fuzzy adaptive integration scheme for low-cost SINS/GPS navigation system. Mech. Syst. Signal Process. 2018, 99, 434–449. [Google Scholar] [CrossRef]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Han, Y.; Yu, Z. IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics. Sensors 2019, 19, 1930. [Google Scholar] [CrossRef] [Green Version]
- Khankalantary, S.; Rafatnia, S.; Mohammadkhani, H. An adaptive constrained type-2 fuzzy Hammerstein neural network data fusion scheme for low-cost SINS/GNSS navigation system. Appl. Soft Comput. 2019, 86, 105917. [Google Scholar] [CrossRef]
- Lee, J.K.; Park, E.J.; Robinovitch, S.N. Estimation of attitude and external acceleration using inertial sensor measurement during various dynamic conditions. IEEE Trans. Instrum. Meas. 2012, 61, 2262–2273. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Shan, S. Dot Product Equality Constrained Attitude Determination from Two Vector Observations: Theory and Astronautical Applications. Aerospace 2019, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Wahba, G. A least squares estimate of satellite attitude. SIAM Rev. 1965, 7, 409. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Springer: New York, NY, USA, 2014; Volume 33. [Google Scholar]
- Yun, X.; Bachmann, E.R.; McGhee, R.B. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Trans. Instrum. Meas. 2008, 57, 638–650. [Google Scholar]
- Liu, F.; Li, J.; Wang, H.; Liu, C. An improved quaternion Gauss–Newton algorithm for attitude determination using magnetometer and accelerometer. Chin. J. Aeronaut. 2014, 27, 986–993. [Google Scholar] [CrossRef] [Green Version]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. A nonlinear filtering approach for the attitude and dynamic body acceleration estimation based on inertial and magnetic sensors: Bio-logging application. IEEE Sens. J. 2010, 11, 233–244. [Google Scholar] [CrossRef] [Green Version]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar]
- Wu, J.; Zhou, Z.; Fourati, H.; Cheng, Y. A super fast attitude determination algorithm for consumer-level accelerometer and magnetometer. IEEE Trans. Consum. Electron. 2018, 64, 375–381. [Google Scholar] [CrossRef]
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A Complementary Filter for Attitude Estimation of a Fixed-Wing UAV. Available online: http://users.cecs.anu.edu.au/~Jonghyuk.Kim/pdf/2008_Euston_iros_v1.04.pdf (accessed on 30 January 2020).
- Tsagarakis, N.G.; Caldwell, D.G.; Negrello, F.; Choi, W.; Baccelliere, L.; Loc, V.; Noorden, J.; Muratore, L.; Margan, A.; Cardellino, A.; et al. WALK-MAN: A High-Performance Humanoid Platform for Realistic Environments. J. Field Robot. 2017, 34, 1225–1259. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.M. Nonlinear complementary filters on the special orthogonal group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef] [Green Version]
- Cavallo, A.; Cirillo, A.; Cirillo, P.; De Maria, G.; Falco, P.; Natale, C.; Pirozzi, S. Experimental comparison of sensor fusion algorithms for attitude estimation. IFAC Proc. Vol. 2014, 47, 7585–7591. [Google Scholar] [CrossRef] [Green Version]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef]
- Mourcou, Q.; Fleury, A.; Franco, C.; Klopcic, F.; Vuillerme, N. Performance evaluation of smartphone inertial sensors measurement for range of motion. Sensors 2015, 15, 23168–23187. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Wei, H.; Tan, J. An adaptive-gain complementary filter for real-time human motion tracking with MARG sensors in free-living environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 21, 254–264. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Zhou, Z.; Chen, J.; Fourati, H.; Li, R. Fast complementary filter for attitude estimation using low-cost MARG sensors. IEEE Sens. J. 2016, 16, 6997–7007. [Google Scholar] [CrossRef]
- Fan, B.; Li, Q.; Liu, T. Improving the accuracy of wearable sensor orientation using a two-step complementary filter with state machine-based adaptive strategy. Meas. Sci. Technol. 2018, 29, 115104. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Kalman-filter-based orientation determination using inertial/magnetic sensors: Observability analysis and performance evaluation. Sensors 2011, 11, 9182–9206. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Wang, J. Effective adaptive Kalman filter for MEMS-IMU/magnetometers integrated attitude and heading reference systems. J. Navig. 2013, 66, 99–113. [Google Scholar] [CrossRef] [Green Version]
- Mazza, C.; Donati, M.; McCamley, J.; Picerno, P.; Cappozzo, A. An optimized Kalman filter for the estimate of trunk orientation from inertial sensors data during treadmill walking. Gait Posture 2012, 35, 138–142. [Google Scholar] [CrossRef]
- Nowicki, M.; Wietrzykowski, J.; Skrzypczyński, P. Simplicity or flexibility? Complementary Filter vs. In EKF for orientation estimation on mobile devices. In Proceedings of the 2015 IEEE 2nd International Conference on Cybernetics (CYBCONF), Gdynia, Poland, 24–26 June 2015. [Google Scholar]
- Zhang, T.; Liao, Y. Attitude measure system based on extended Kalman filter for multi-rotors. Comput. Electron. Agric. 2017, 134, 19–26. [Google Scholar] [CrossRef]
- Feng, K.; Li, J.; Zhang, X.; Shen, C.; Bi, Y.; Zheng, T.; Liu, J. A new quaternion-based Kalman filter for real-time attitude estimation using the two-step geometrically-intuitive correction algorithm. Sensors 2017, 17, 2146. [Google Scholar] [CrossRef] [Green Version]
- Ligorio, G.; Sabatini, A.M. A novel Kalman filter for human motion tracking with an inertial-based dynamic inclinometer. IEEE Trans. Biomed. Eng. 2015, 62, 2033–2043. [Google Scholar] [CrossRef]
- Makni, A.; Fourati, H.; Kibangou, A.Y. Energy-aware adaptive attitude estimation under external acceleration for pedestrian navigation. IEEE/ASME Trans. Mechatron. 2015, 21, 1366–1375. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Q.; Asadi, E.; Lu, Q.; Yang, G.; Chen, I.M. Uncertainty-Based IMU Orientation Tracking Algorithm for Dynamic Motions. IEEE/ASME Trans. Mechatron. 2019, 24, 872–882. [Google Scholar] [CrossRef]
- Stateczny, A. Neural manoeuvre detection of the tracked target in ARPA systems. IFAC Proc. Vol. 2001, 34, 209–214. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W. A comparison of the target tracking in marine navigational radars by means of GRNN filter and numerical filter. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Kazimierski, W.; Łubczonek, J. Verification of marine multiple model neural tracking filter for the needs of shore radar stations. In Proceedings of the 2012 13th International Radar Symposium, Warsaw, Poland, 23–25 May 2012. [Google Scholar]
- Assad, A.; Khalaf, W.; Chouaib, I. Novel Adaptive Fuzzy Extended Kalman Filter for Attitude Estimation in Gps-Denied Environment. Gyroscopy Navig. 2019, 10, 131–146. [Google Scholar] [CrossRef]
- Al Mansour, M.; Chouaib, I.; Jafar, A.; Potapov, A. Analytical Algorithm for Attitude and Heading Estimation Aided by Maneuver Classification. Gyroscopy Navig. 2019, 10, 77–89. [Google Scholar] [CrossRef]
- Chiella, A.C.; Teixeira, B.O.; Pereira, G.A. Quaternion-Based Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter. Sensors 2019, 19, 2372. [Google Scholar] [CrossRef] [Green Version]
- Kang, D.; Jang, C.; Park, F.C. Unscented Kalman Filtering for Simultaneous Estimation of Attitude and Gyroscope Bias. IEEE/ASME Trans. Mechatron. 2019, 24, 350–360. [Google Scholar] [CrossRef]
- Xi, L.; Chen, B.; Zhao, H.; Qin, J.; Cao, J. Maximum Correntropy Kalman Filter With State Constraints. IEEE Access 2017, 5, 25846–25853. [Google Scholar]
- Habbachi, S.; Sayadi, M.; Fnaiech, F.; Rezzoug, N.; Gorce, P.; Benbouzid, M. Estimation of IMU orientation using linear Kalman filter based on correntropy criterion. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018. [Google Scholar]
- Kulikov, G.Y.; Kulikova, M. Estimation of maneuvering target in the presence of non-Gaussian noise: A coordinated turn case study. Signal Process. 2018, 145, 241–257. [Google Scholar] [CrossRef]
- Kownacki, C. Optimization approach to adapt Kalman filters for the real-time application of accelerometer and gyroscope signals’ filtering. Digital Signal Process. 2011, 21, 131–140. [Google Scholar] [CrossRef]
- Odry, Á. Fuzzy-Adaptive Extended Kalman Filter Supplementary Material. Available online: http://appl-dsp.com/faekf/ (accessed on 31 January 2020).
- Kuipers, J.B. Quaternions and Rotation Sequences; Princeton University Press: Princeton, NJ, USA, 1999; Volume 66. [Google Scholar]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 1–35. [Google Scholar]
- Aggarwal, P. MEMS-Based Integrated Navigation; Artech House: Norwood, MA, USA, 2010. [Google Scholar]
- Höflinger, F.; Müller, J.; Zhang, R.; Reindl, L.M.; Burgard, W. A wireless micro inertial measurement unit (IMU). IEEE Trans. Instrum. Meas. 2013, 62, 2583–2595. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B.; Gustafsson, F.; Luinge, H. Calibration of a magnetometer in combination with inertial sensors. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012. [Google Scholar]
- Papafotis, K.; Sotiriadis, P.P. MAG. IC AL.–A Unified Methodology for Magnetic and Inertial Sensors Calibration and Alignment. IEEE Sens. J. 2019, 19, 8241–8251. [Google Scholar] [CrossRef]
- Sarcevic, P.; Kincses, Z.; Pletl, S. Online human movement classification using wrist-worn wireless sensors. J. Ambient Intell. Humaniz. Comput. 2019, 10, 89–106. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S.D. Three-axis attitude determination from vector observations. J. Guidance Control 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Wang, L.X. A Course in Fuzzy Systems and Control; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Bloch, A.M. Nonholonomic mechanics. In Nonholonomic Mechanics and Control; Springer: New York, NY, USA, 2003; pp. 207–276. [Google Scholar]
- Furrer, F.; Burri, M.; Achtelik, M.; Siegwart, R. Robot Operating System (ROS): The Complete Reference; Springer: Cham, Switzerland, 2016; pp. 595–625. [Google Scholar]
- Quigley, M.; Gerkey, B.; Smart, W.D. Programming Robots with ROS: A Practical Introduction to the Robot Operating System; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2015. [Google Scholar]
- Koubâa, A. Robot Operating System (ROS); Springer: Cham, Switzerland, 2017. [Google Scholar]
- Meyer, J.; Sendobry, A.; Kohlbrecher, S.; Klingauf, U.; Von Stryk, O. Comprehensive simulation of quadrotor uavs using ros and gazebo. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots, Tsukuba, Japan, 5–8 November 2012; pp. 400–411. [Google Scholar]
- Sarcevic, P.; Pletl, S. False detection filtering method for magnetic sensor-based vehicle detection systems. In Proceedings of the 2018 IEEE 16th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 13–15 September 2018. [Google Scholar]
- Borbás, K.; Kiss, T.; Klincsik, M.; Kvasznicza, Z.; Máthé, K.; Vér, C.; Vizvári, Z.; Odry, P. Process and Measuring System for Data Acquisition and Processing in Soft-Tomography Studies. U.S. Patent App. 16,062,319, 27 December 2018. [Google Scholar]
- Wu, J.; Zhou, Z.; Fourati, H.; Li, R.; Liu, M. Generalized Linear Quaternion Complementary Filter for Attitude Estimation From Multisensor Observations: An Optimization Approach. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1330–1343. [Google Scholar] [CrossRef]
- Wu, J. Real-time Magnetometer Disturbance Estimation via Online Nonlinear Programming. IEEE Sens. J. 2019, 19, 4405–4411. [Google Scholar] [CrossRef] [Green Version]
- Marple, L. Computing the discrete-time” analytic” signal via FFT. IEEE Trans. Signal Process. 1999, 47, 2600–2603. [Google Scholar] [CrossRef]
- Kecskés, I.; Odry, P. Optimization of PI and Fuzzy-PI Controllers on Simulation Model of Szabad (ka)-II walking robot. Int. J. Adv. Robot. Syst. 2014, 11, 186. [Google Scholar] [CrossRef]
- Modares, H.; Alfi, A.; Sistani, M.B.N. Parameter estimation of bilinear systems based on an adaptive particle swarm optimization. Eng. Appl. Artif. Intell. 2010, 23, 1105–1111. [Google Scholar] [CrossRef]
- Kennedy, J.F.; Kennedy, J.; Eberhart, R.C.; Shi, Y. Swarm Intelligence; Morgan Kaufmann: Burlington, MA, USA, 2001. [Google Scholar]
- Odry, Á.; Kecskés, I.; Burkus, E.; Odry, P. Protective Fuzzy Control of a Two-Wheeled Mobile Pendulum Robot: Design and Optimization. WSEAS Trans. Syst. Control 2017, 12, 297–306. [Google Scholar]
- Odry, À.; Fullér, R. Comparison of Optimized PID and Fuzzy Control Strategies on a Mobile Pendulum Robot. In Proceedings of the 2018 IEEE 12th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 17–19 May 2018; pp. 207–212. [Google Scholar]
- Kecskés, I.; Burkus, E.; Bazsó, F.; Odry, P. Model validation of a hexapod walker robot. Robotica 2017, 35, 419–462. [Google Scholar] [CrossRef]
- Odry, Á.; Kecskes, I.; Burkus, E.; Kiraly, Z.; Odry, P. Optimized Fuzzy Control of a Two-Wheeled Mobile Pendulum System. Int. J. Control Syst. Robot. 2017, 2, 73–79. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibration | Mag. pert. | Vibration | Mag. pert. | Vibration | Mag. pert. | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Z | S | B | Z | S | B | Z | S | B | ||||||||
| Ext. acc. | Z | Ext. acc. | Z | Ext. acc. | Z | |||||||||||
| S | S | S | ||||||||||||||
| B | B | B | ||||||||||||||
| Condition | roll () | pitch () | yaw () | ||||
|---|---|---|---|---|---|---|---|
| MSE () | STD (rad) | MSE () | STD (rad) | MSE () | STD (rad) | ||
| M1 | FAEKF | 0.0010 | 0.0301 | 0.0026 | 0.0421 | 0.0004 | 0.0188 |
| EKF | 0.0037 | 0.0605 | 0.0127 | 0.0927 | 0.0099 | 0.0688 | |
| M2 | FAEKF | 0.0020 | 0.0433 | 0.0040 | 0.0536 | 0.0007 | 0.0261 |
| EKF | 0.0089 | 0.0937 | 0.0252 | 0.1261 | 0.0085 | 0.0916 | |
| M3 | FAEKF | 0.0050 | 0.0695 | 0.0056 | 0.0548 | 0.0016 | 0.0405 |
| EKF | 0.0046 | 0.0669 | 0.0102 | 0.0650 | 0.0089 | 0.0944 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Odry, Á.; Kecskes, I.; Sarcevic, P.; Vizvari, Z.; Toth, A.; Odry, P. A Novel Fuzzy-Adaptive Extended Kalman Filter for Real-Time Attitude Estimation of Mobile Robots. Sensors 2020, 20, 803. https://0-doi-org.brum.beds.ac.uk/10.3390/s20030803
Odry Á, Kecskes I, Sarcevic P, Vizvari Z, Toth A, Odry P. A Novel Fuzzy-Adaptive Extended Kalman Filter for Real-Time Attitude Estimation of Mobile Robots. Sensors. 2020; 20(3):803. https://0-doi-org.brum.beds.ac.uk/10.3390/s20030803
Chicago/Turabian StyleOdry, Ákos, Istvan Kecskes, Peter Sarcevic, Zoltan Vizvari, Attila Toth, and Péter Odry. 2020. "A Novel Fuzzy-Adaptive Extended Kalman Filter for Real-Time Attitude Estimation of Mobile Robots" Sensors 20, no. 3: 803. https://0-doi-org.brum.beds.ac.uk/10.3390/s20030803