
Contactless AC/DC Wide-Bandwidth Current Sensor Based on Composite Measurement Principle
Abstract
:1. Introduction
2. Principle of Current Measurement
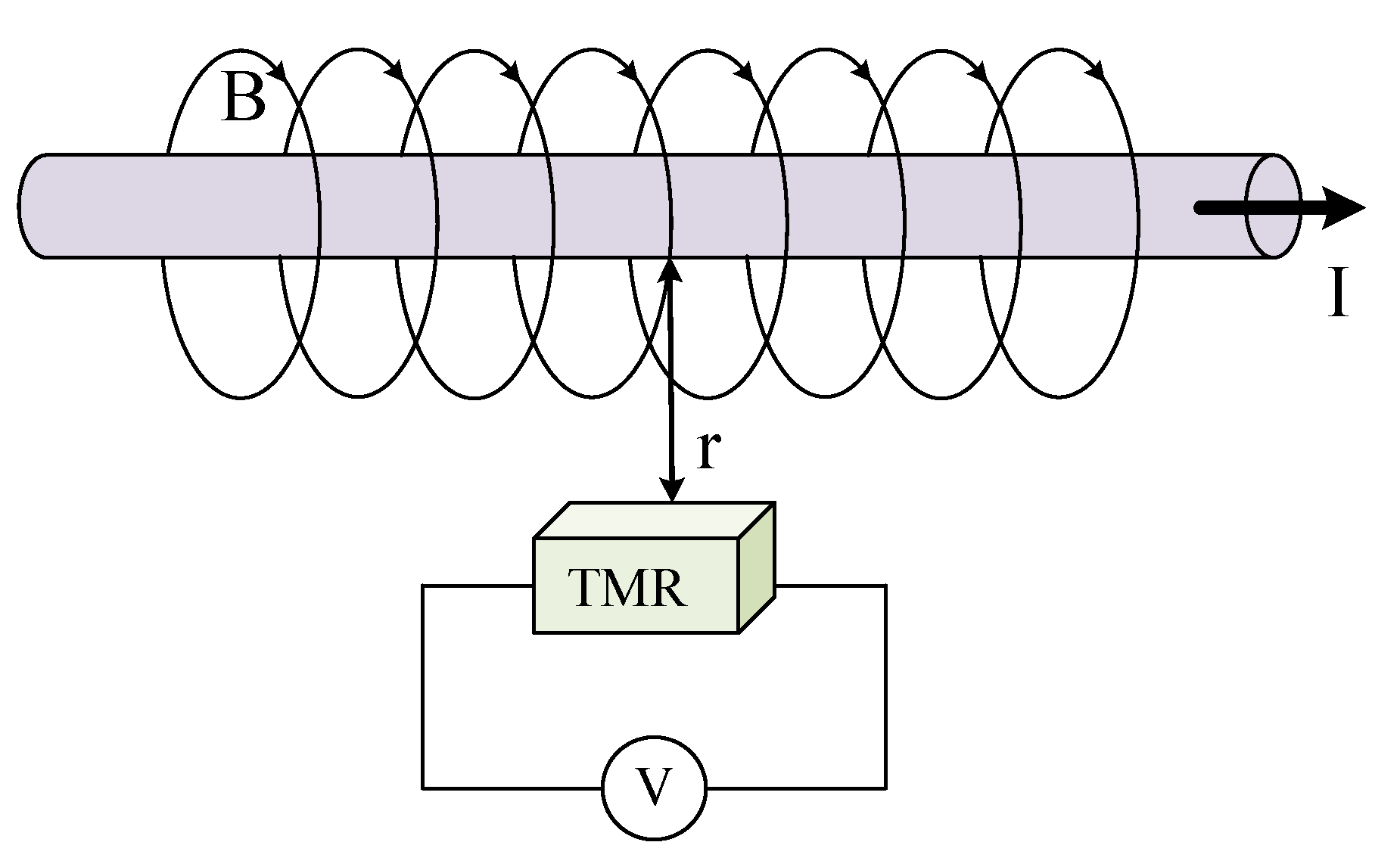
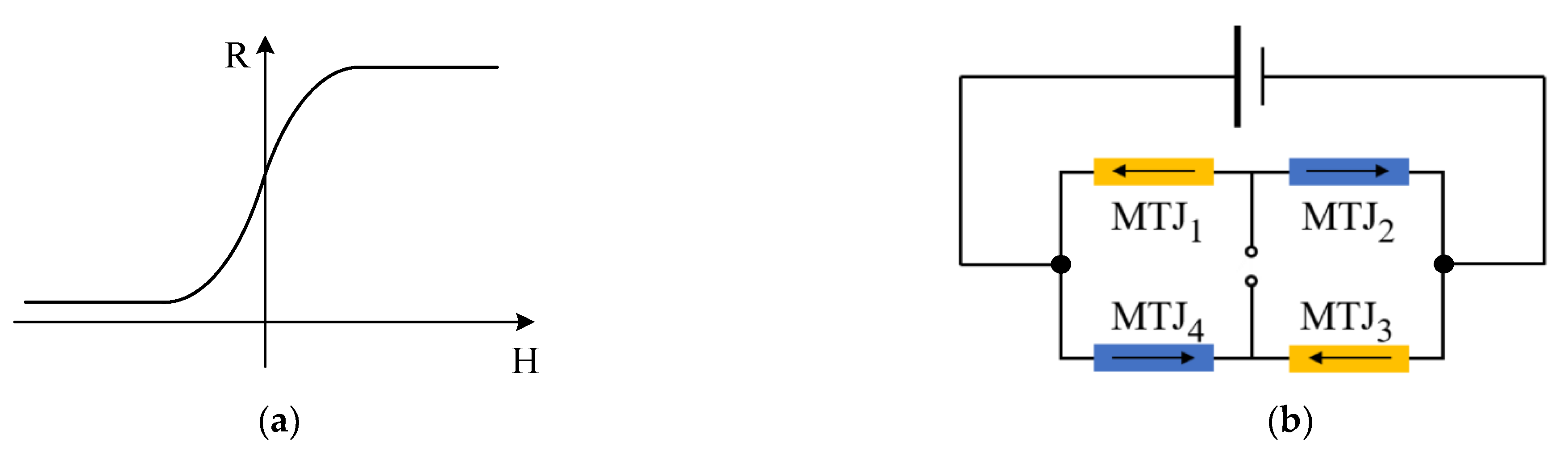
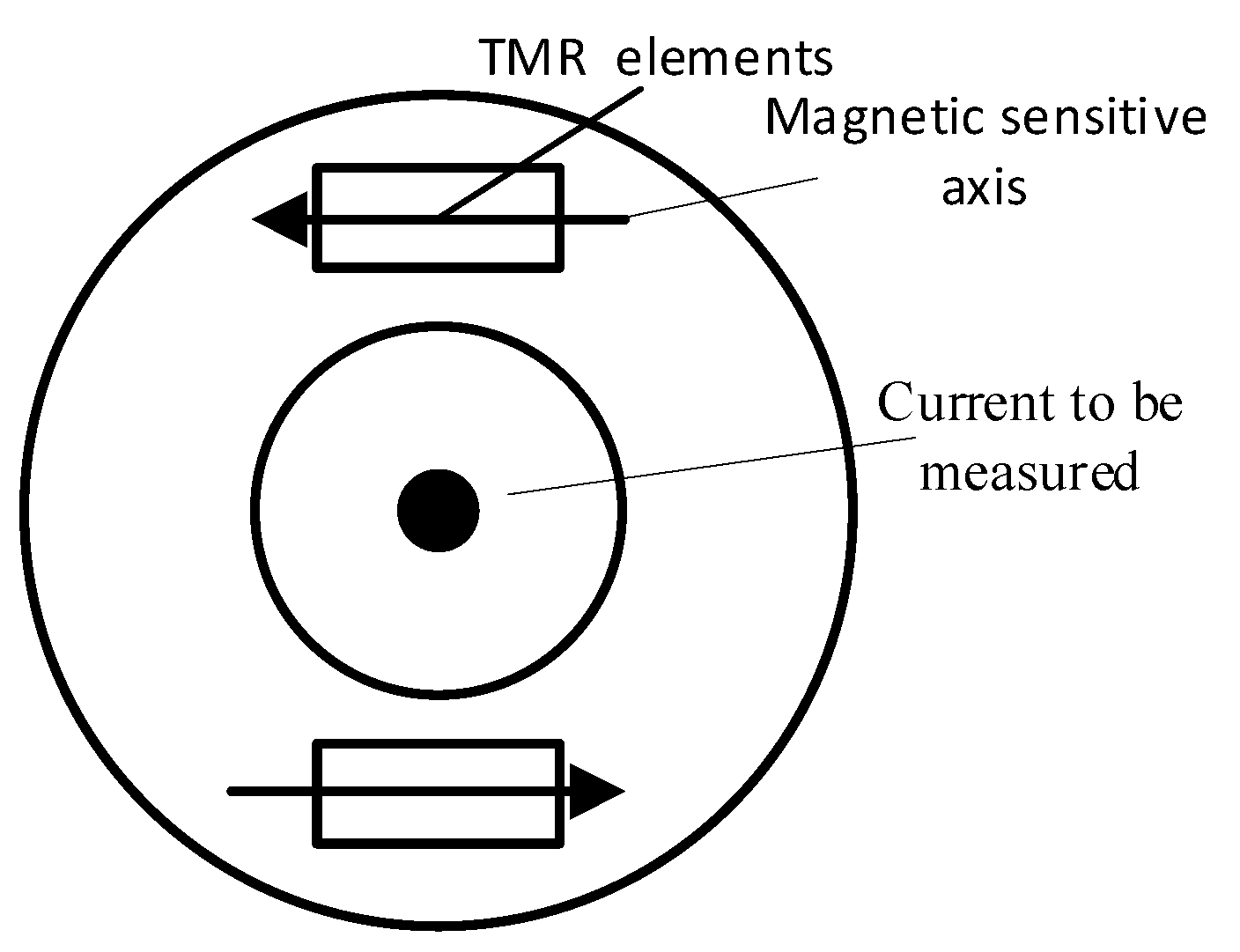
2.1. Principle of Current Sensor Based on Magnetoresistive Element
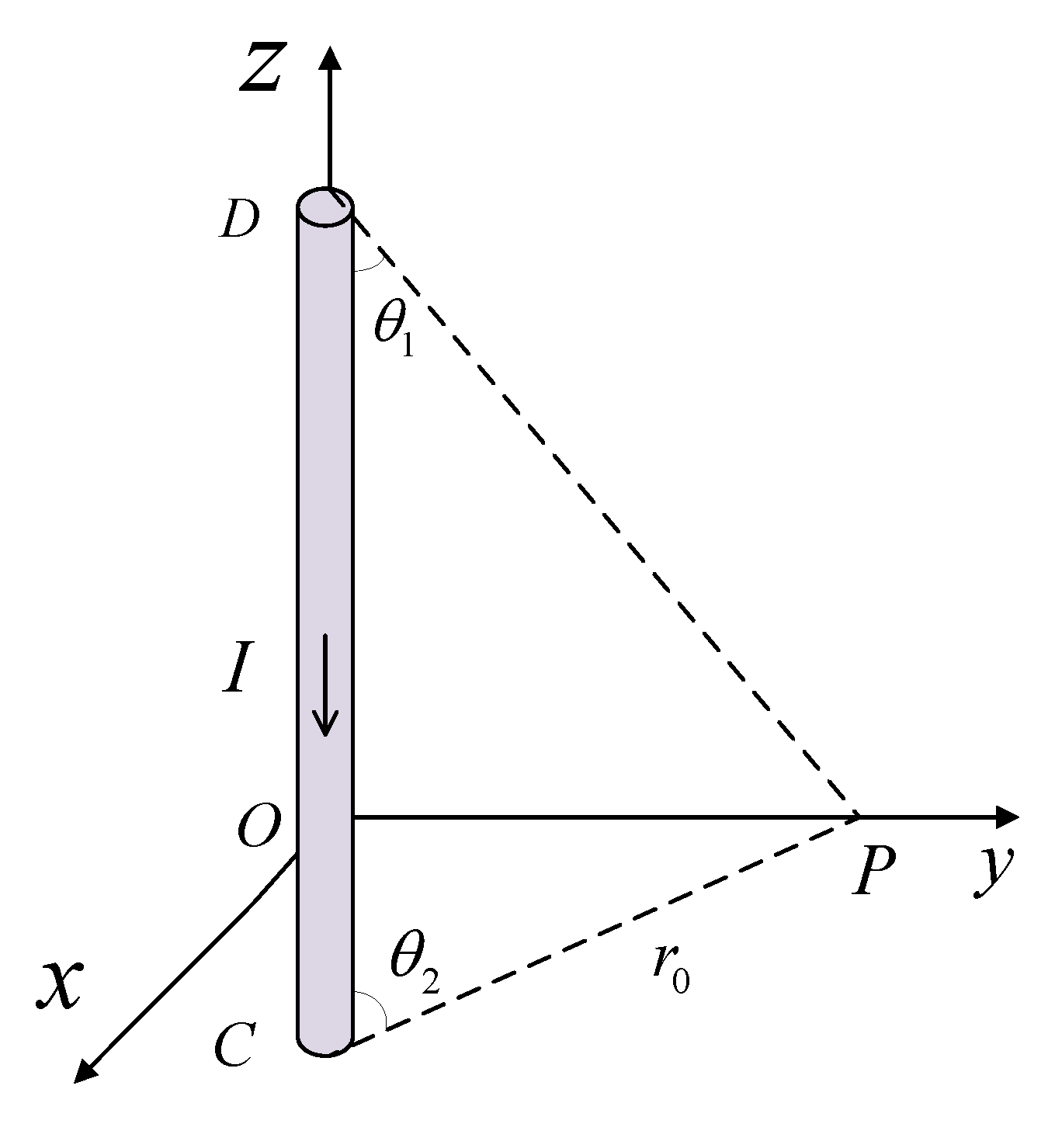
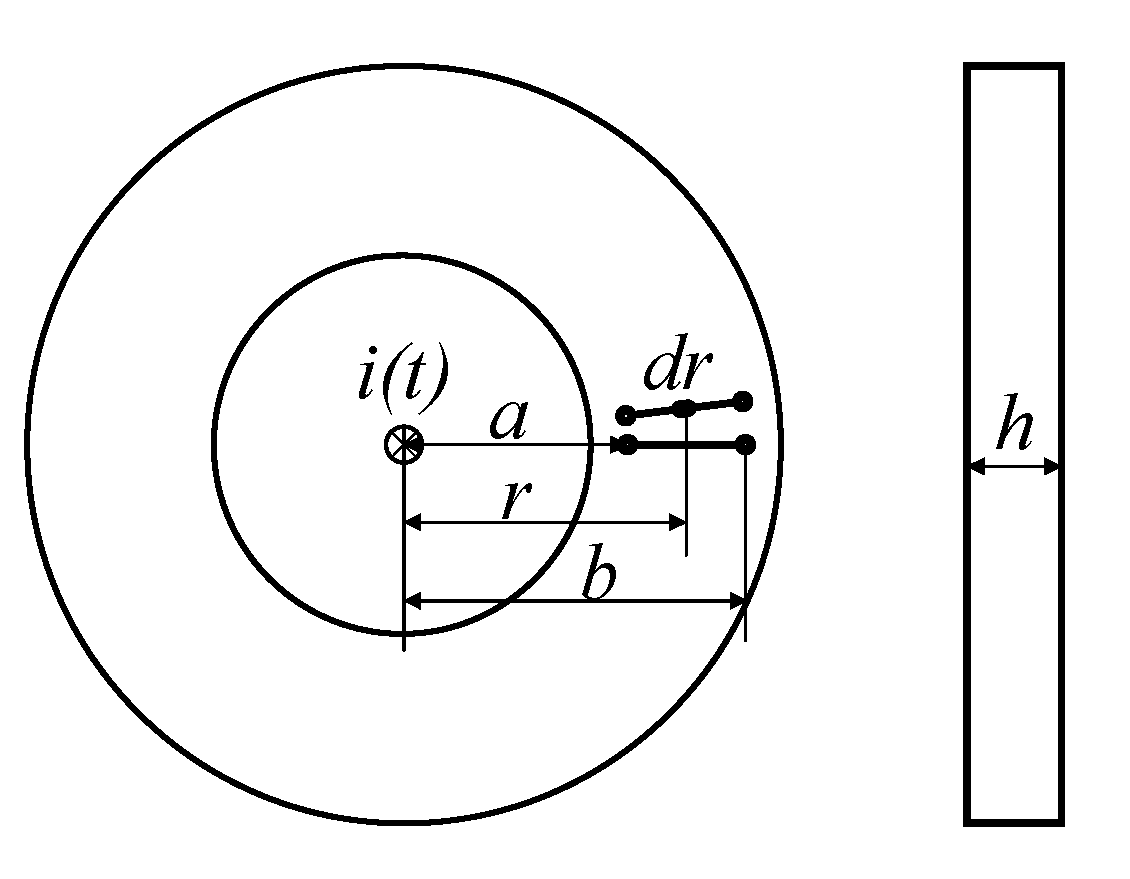
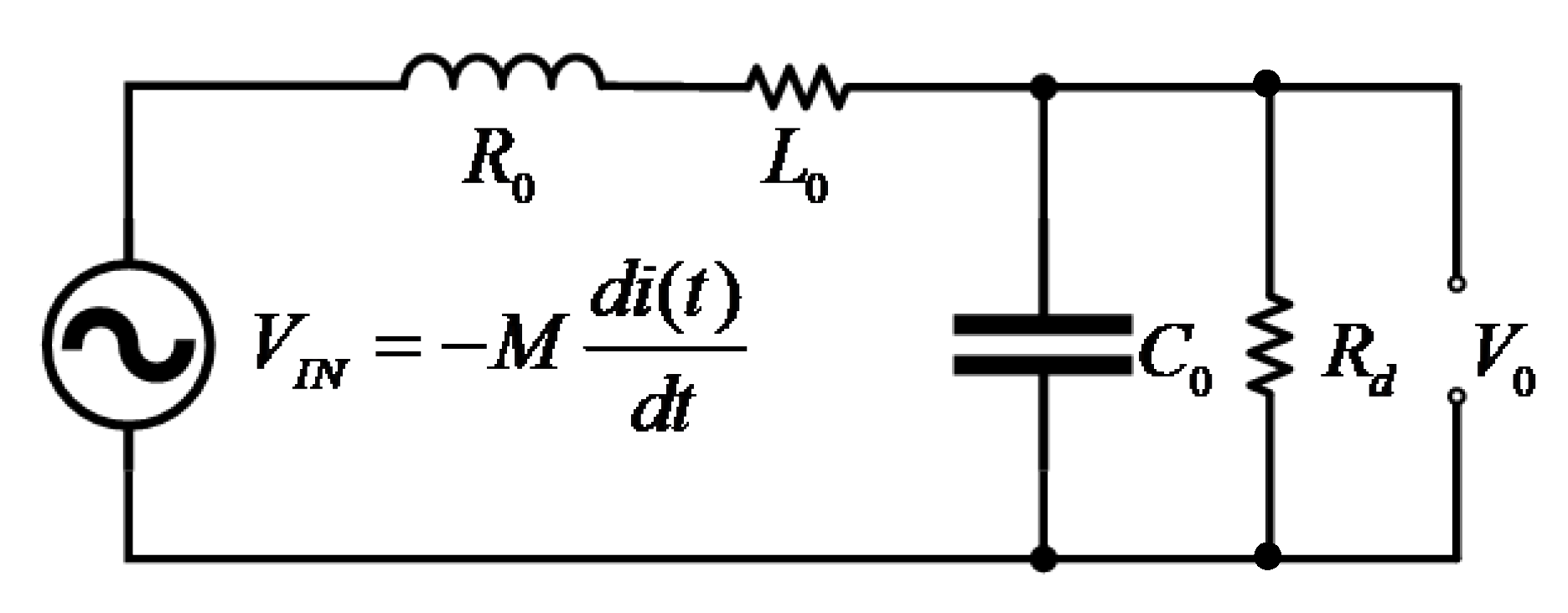
2.2. Measurement Principle of the Planar PCB Roche Coil Current Sensor
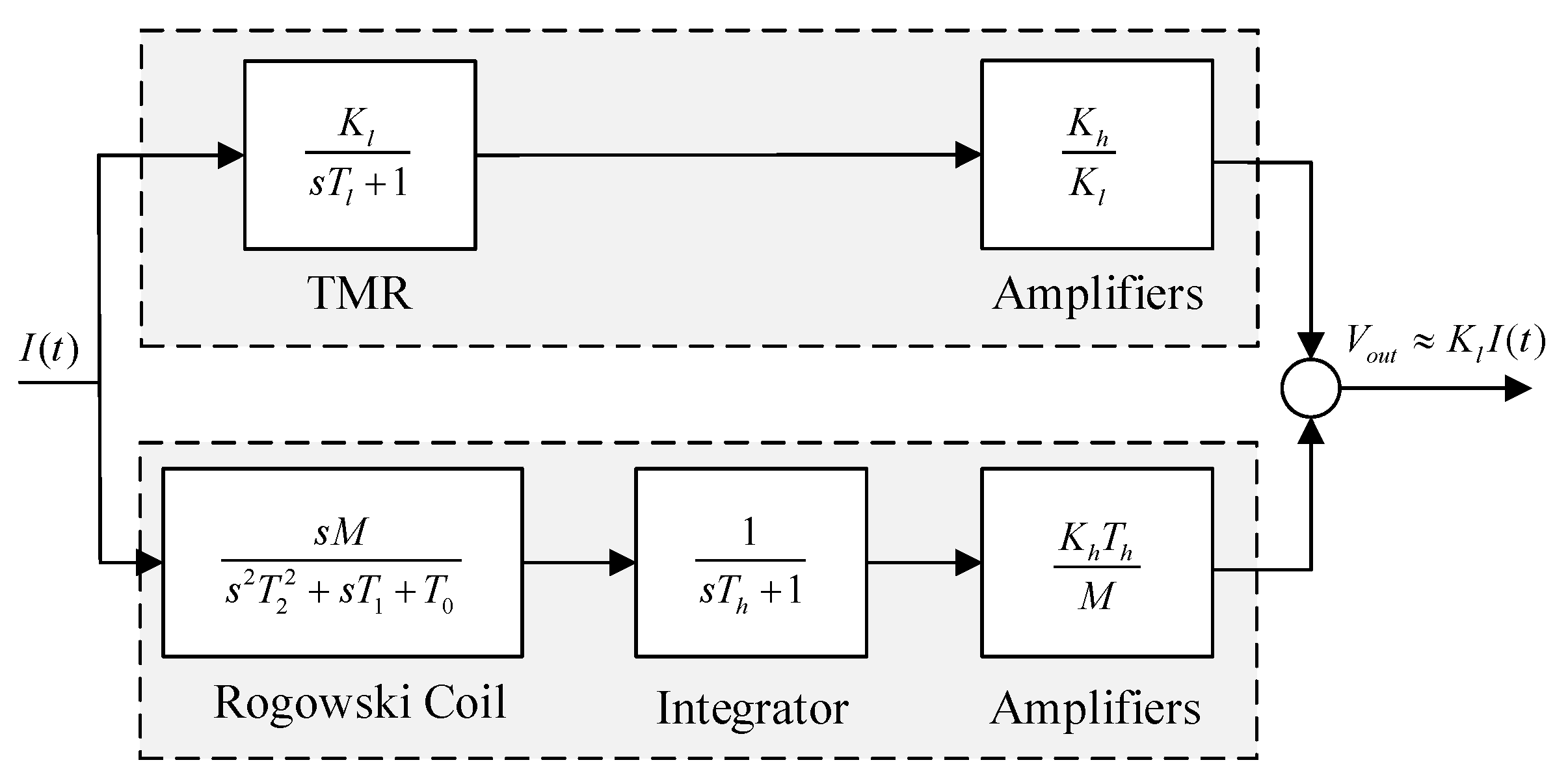
2.3. Measurement Principle of the Composite Current Sensor
3. Design and Implementation of Composite Current Sensor
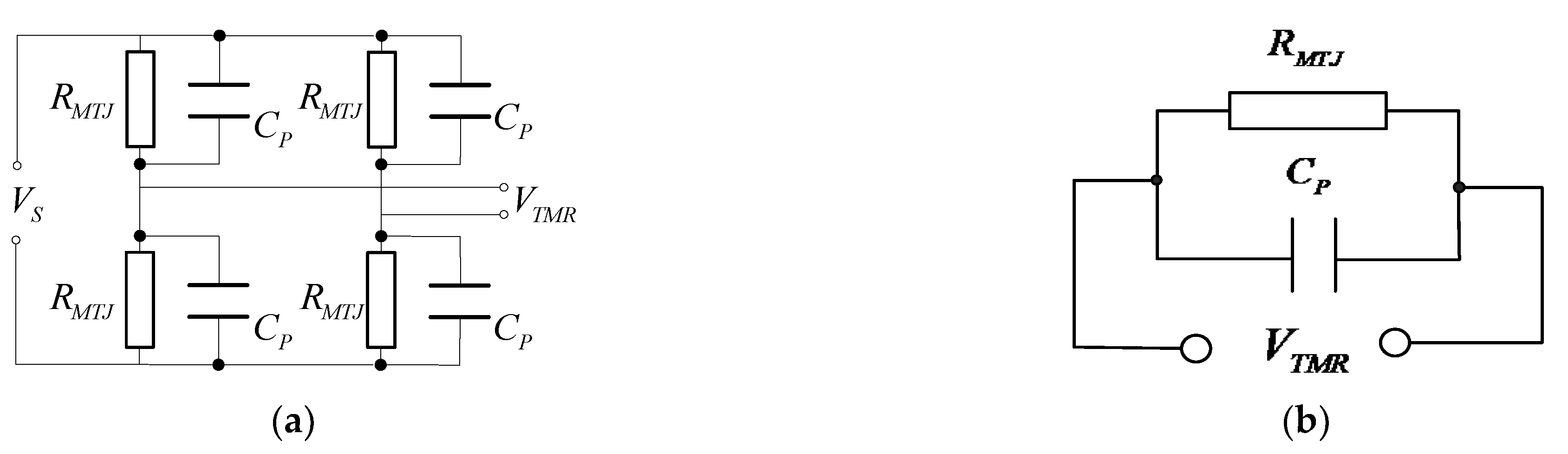
3.1. Design of Loop Array TMR Current Sensor
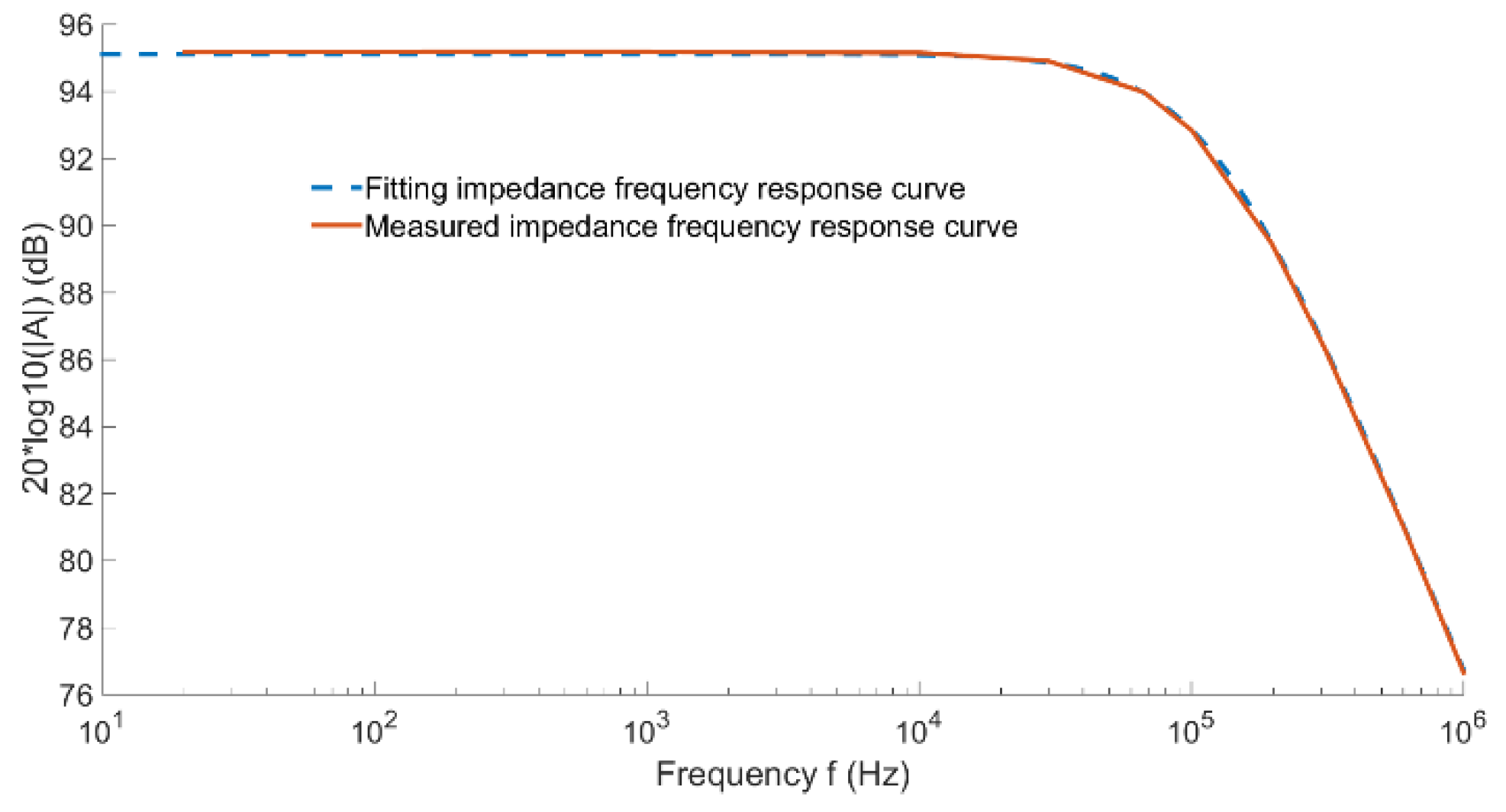
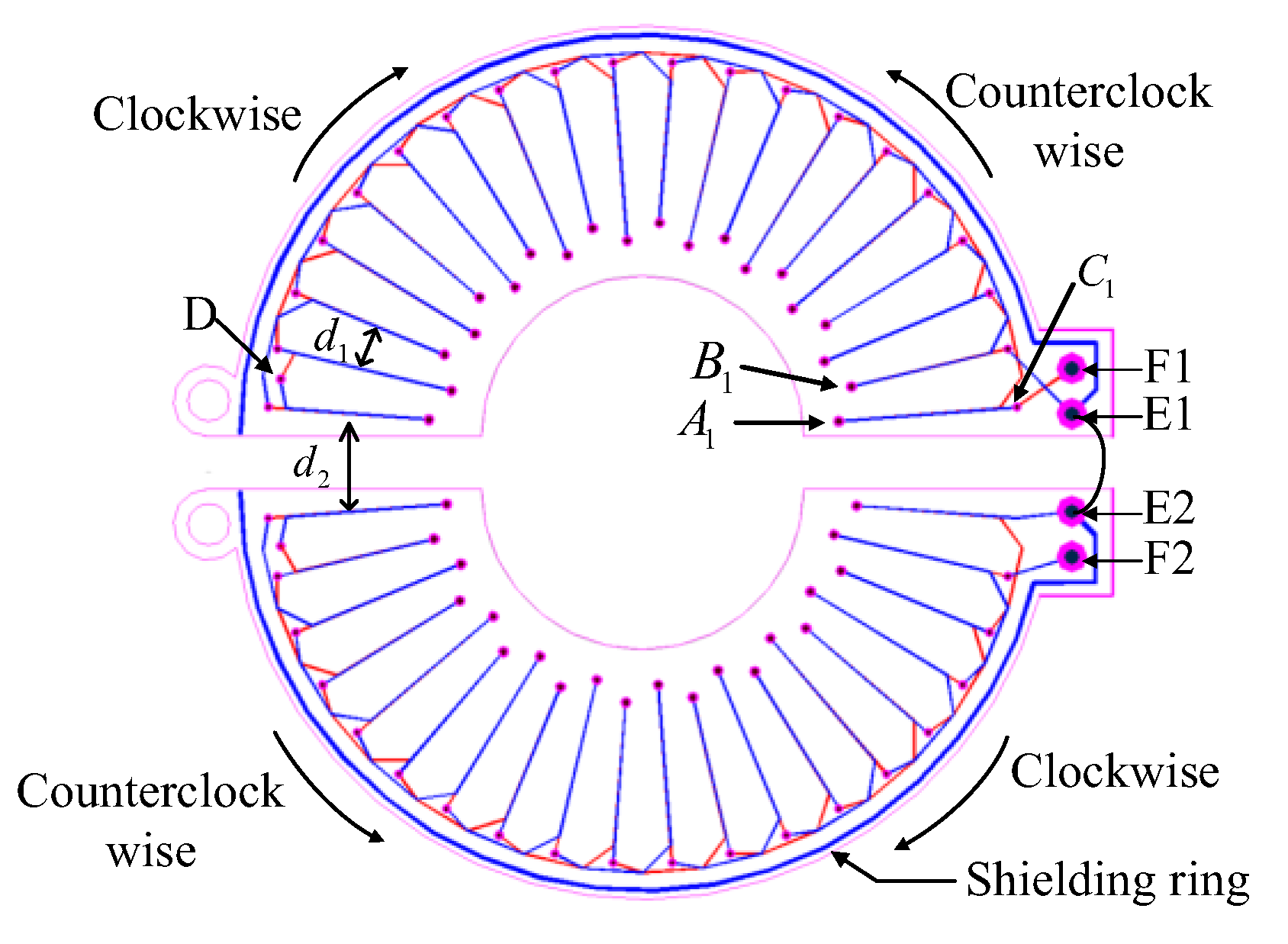
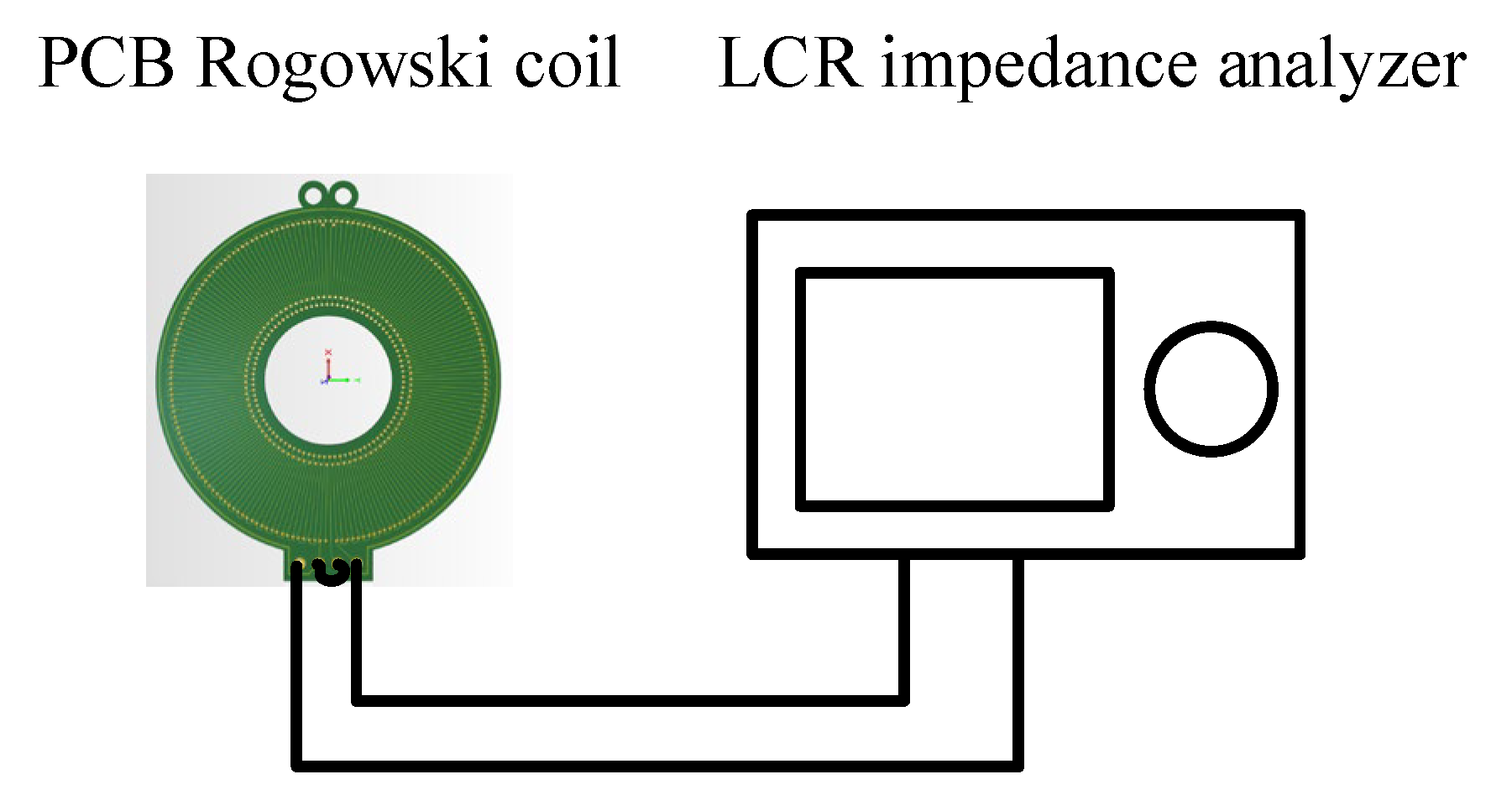
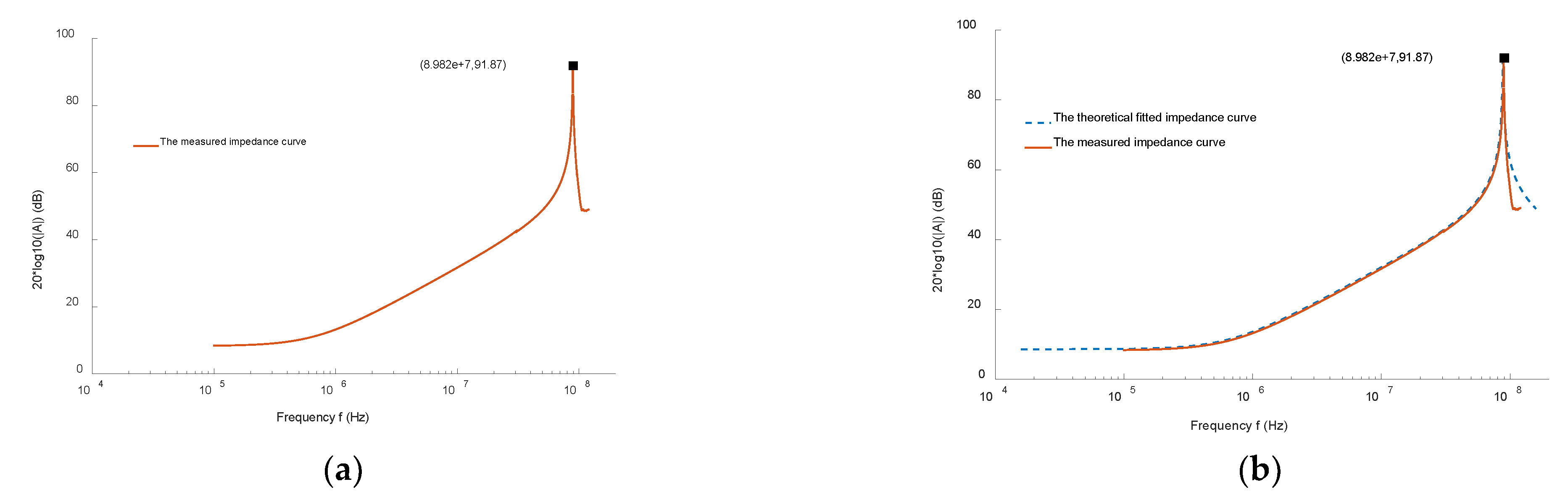
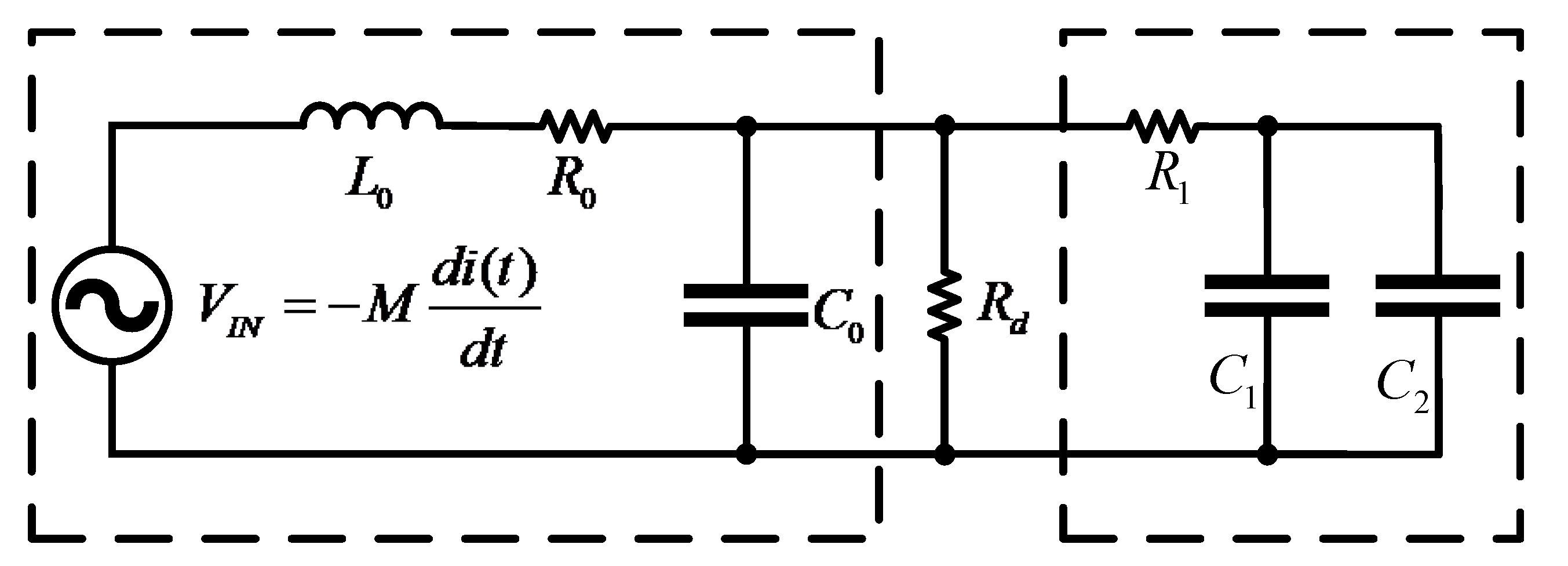
3.2. Design of the High-Frequency Rogowski coil Current Sensor
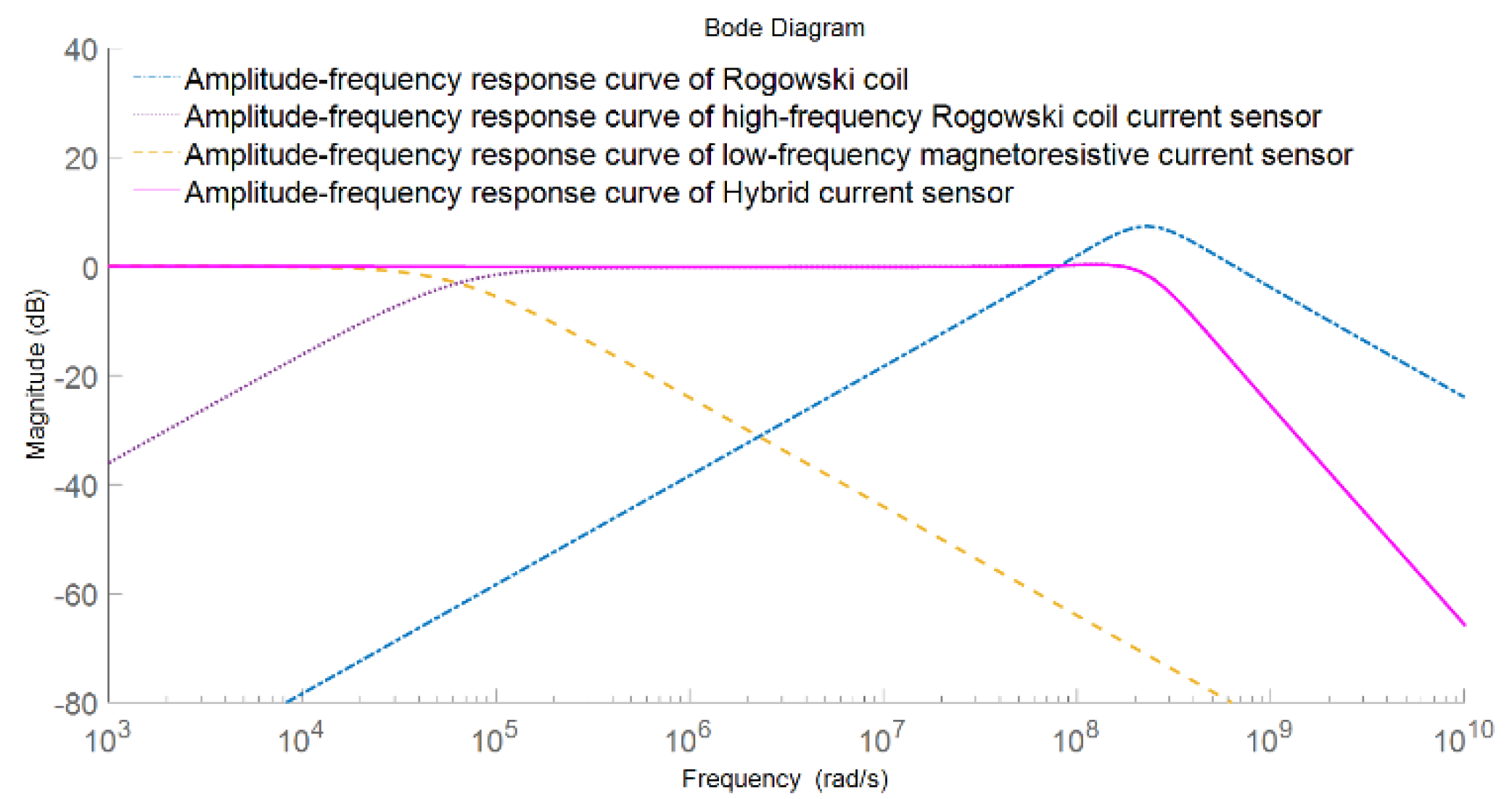
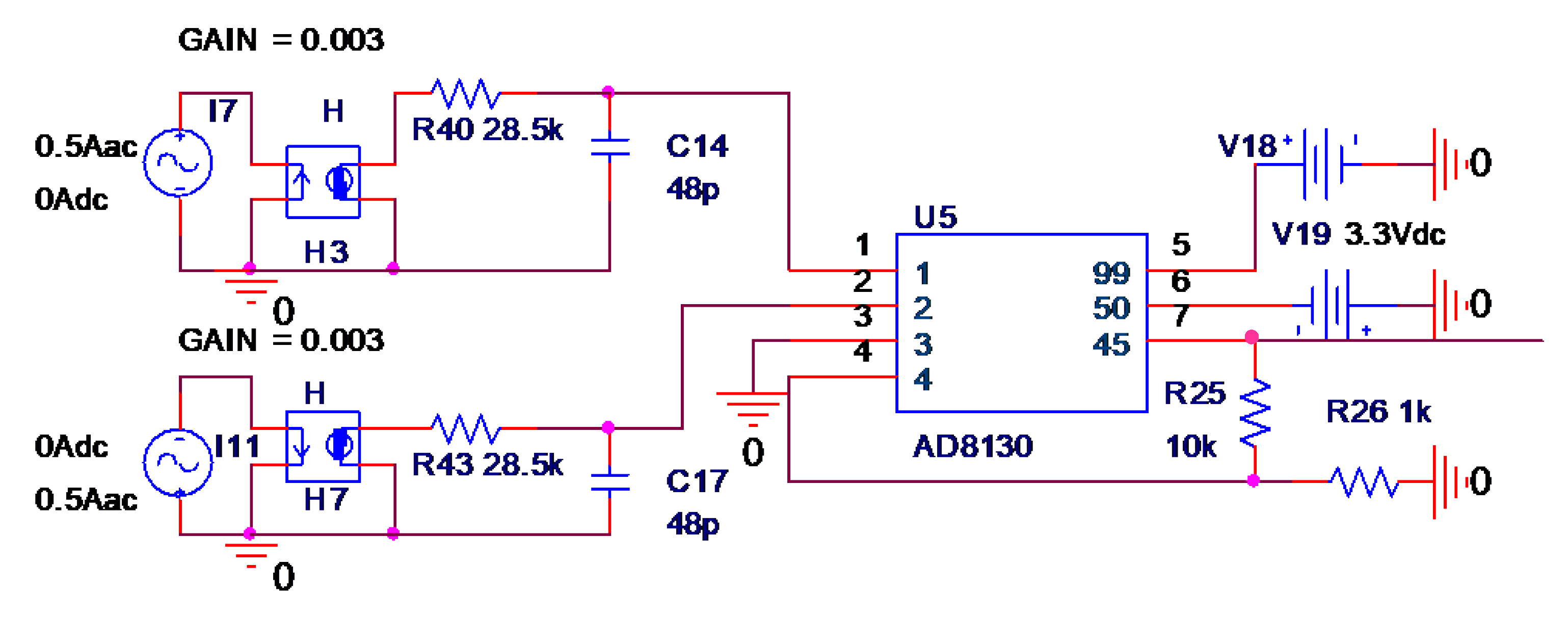
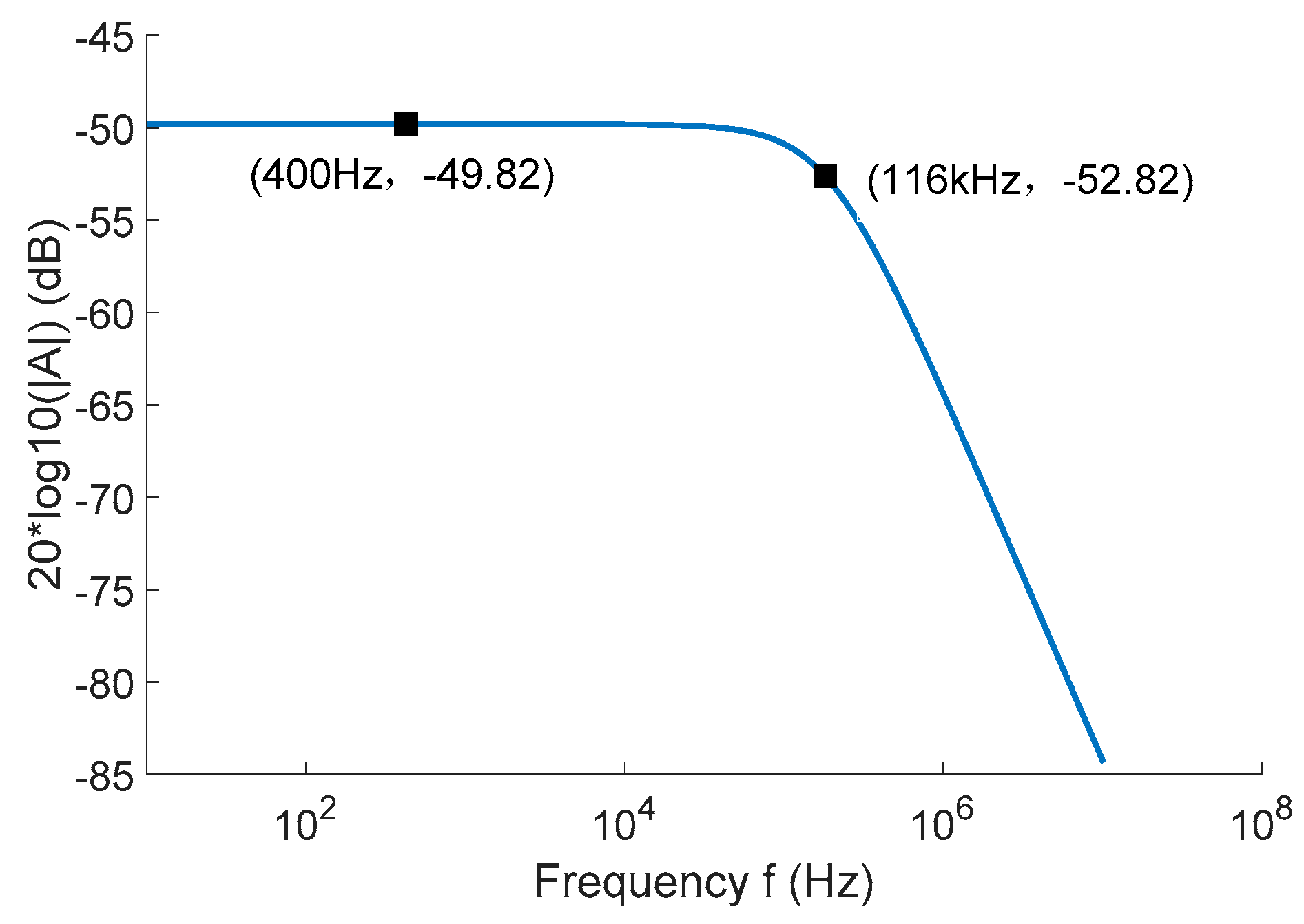
3.3. Overall Design and Simulation of Composite Current Sensor
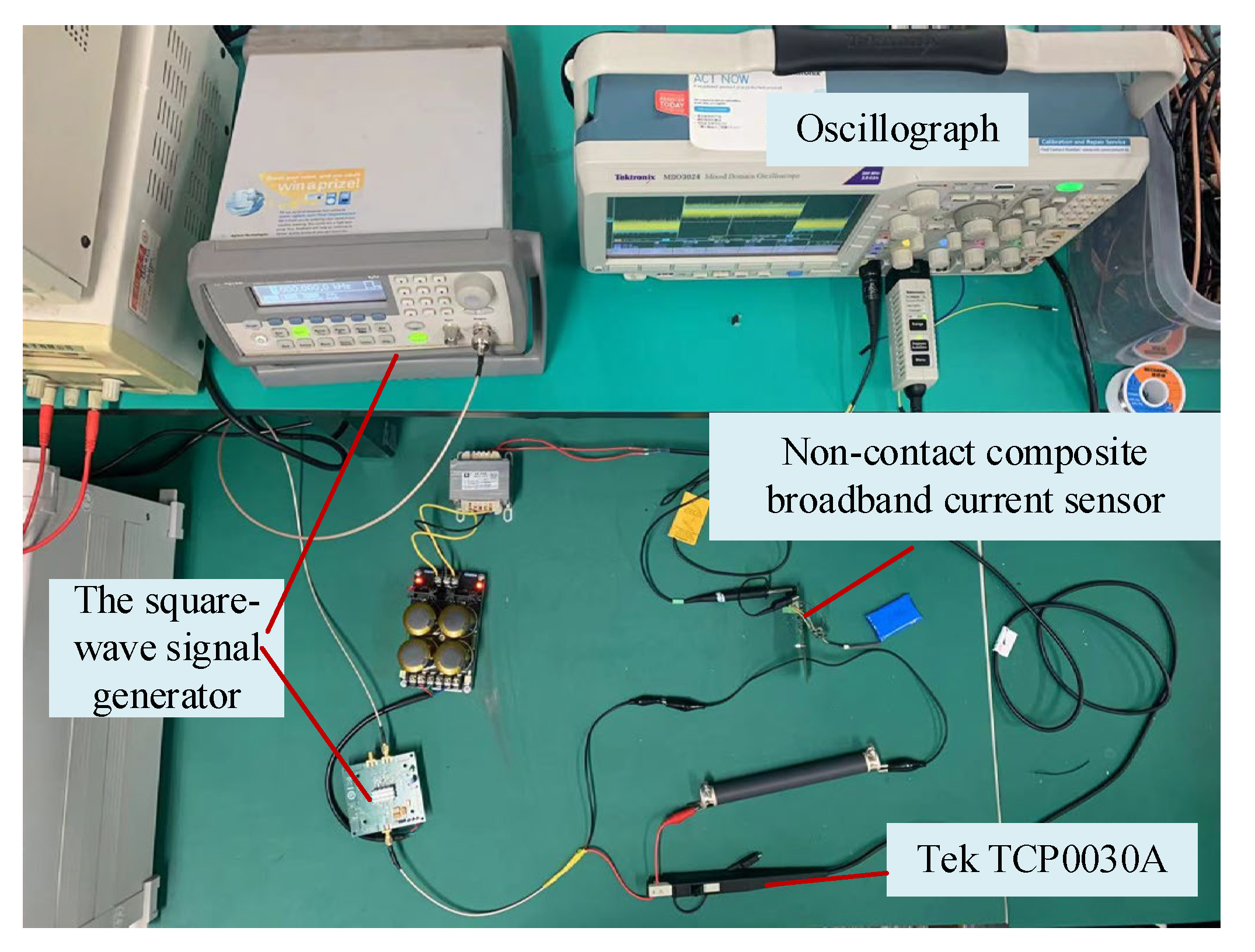
4. Experiment Results
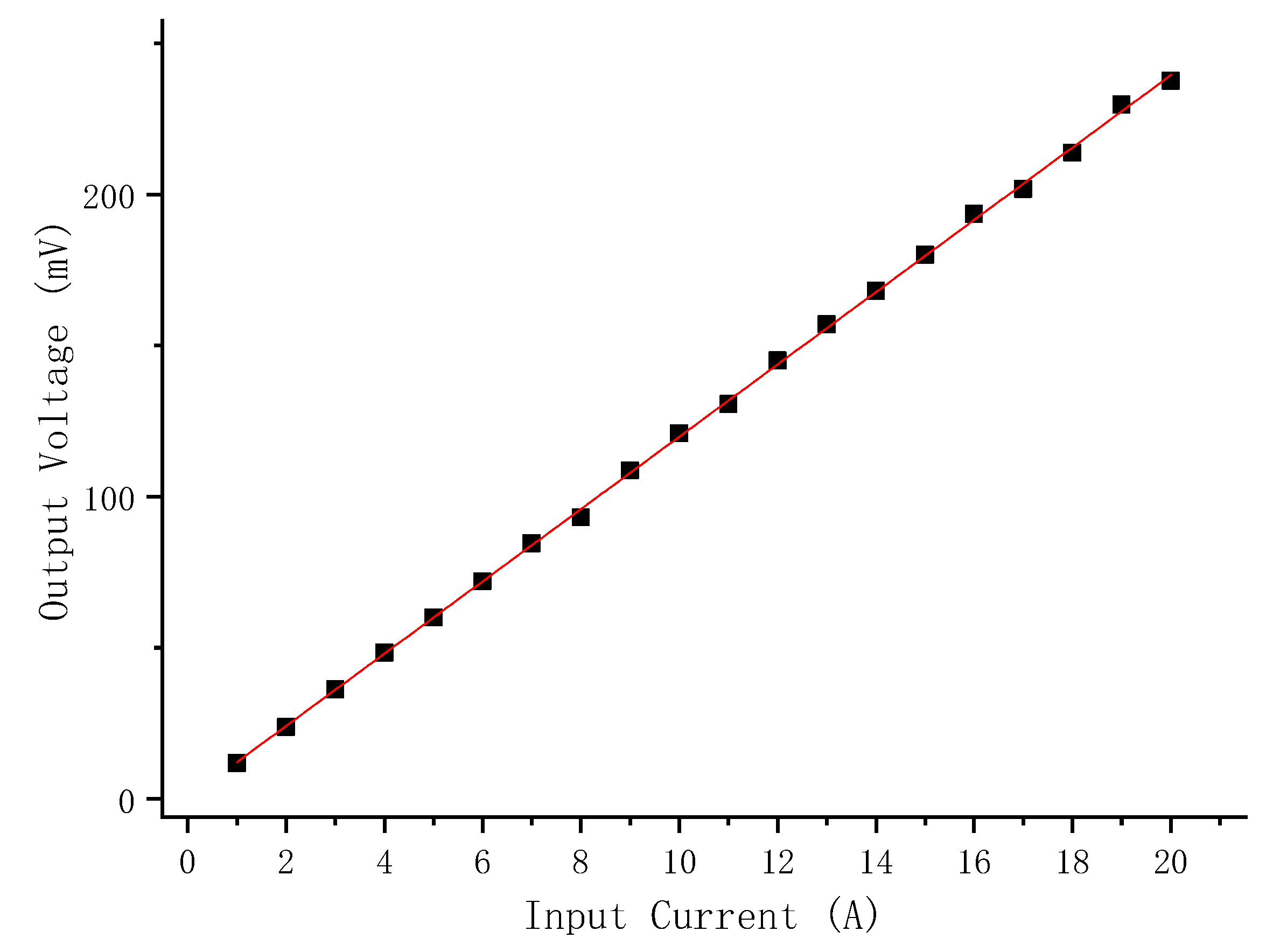
4.1. DC Transmission Characteristics Test of Non-Contact Composite Wide-Bandwidth Current Sensor
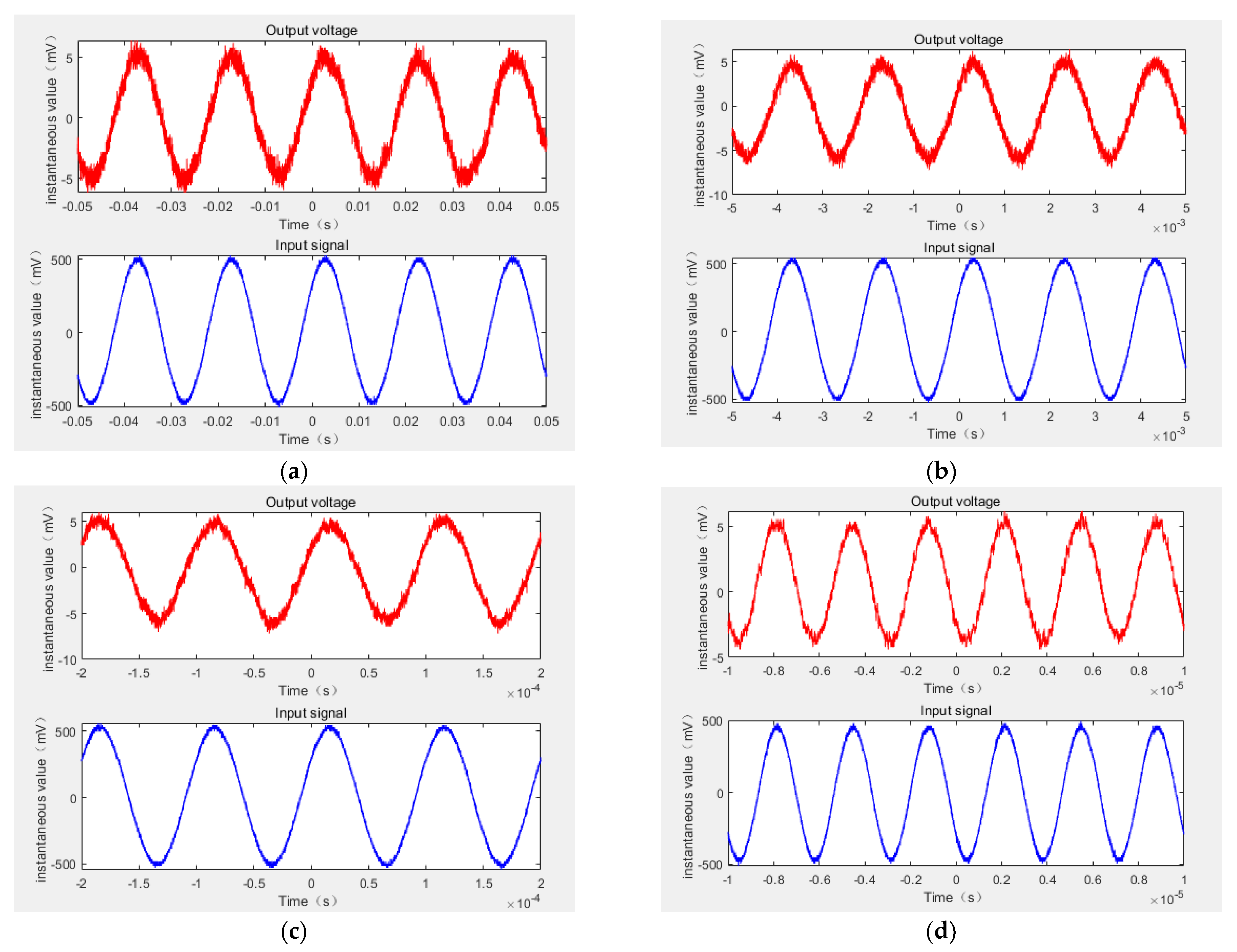
4.2. AC Output Waveform Test
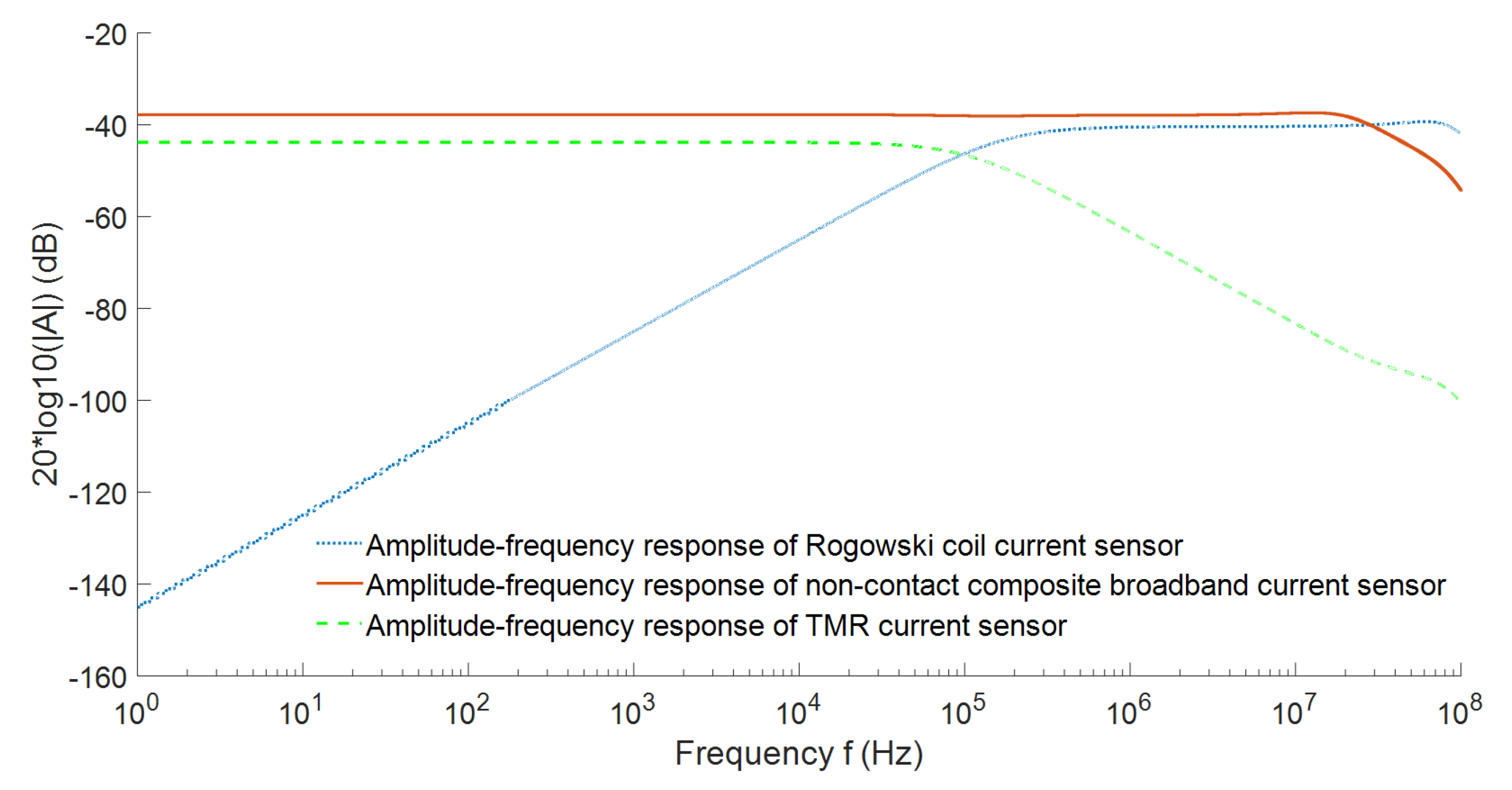
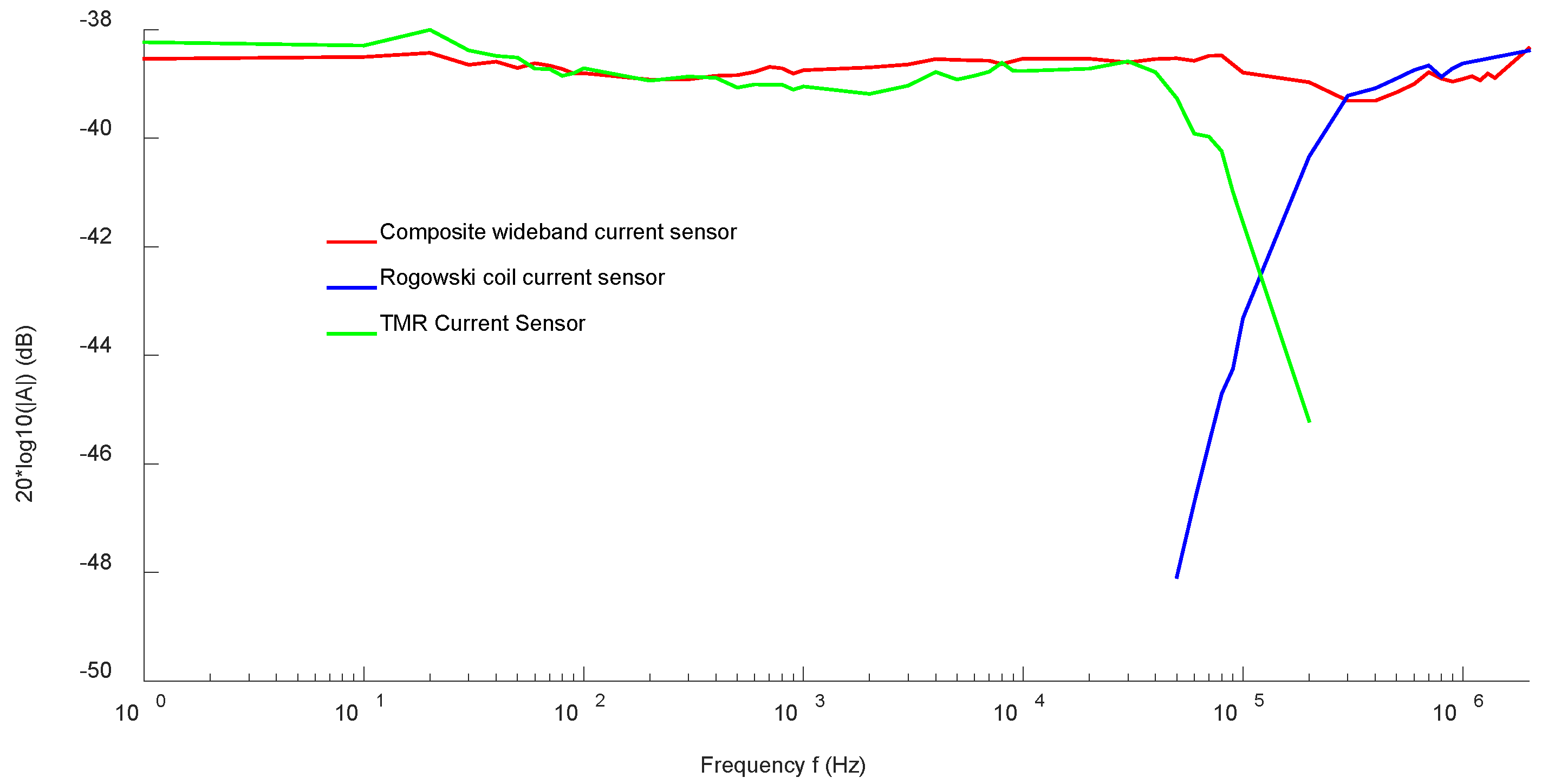
4.3. Frequency Range Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, S.Y.; Song, S.F.; Li, L.X. Summary of smart grid technology. Power Syst. Technol. 2009, 33, 1–7. [Google Scholar]
- Yang, G.; Liu, Y. Research Progress of advanced voltage and current sensing methods for smart grid. High Volt. Eng. 2019, 19. [Google Scholar]
- Fang, S.Y. Application of power electronic technology in electric power systems. High Volt. Eng. 2005, 31, 3. [Google Scholar]
- Budka, K.C.; Deshpande, J.G.; Thottan, M. Introduction to Smart Grids; Springer: London, UK, 2014. [Google Scholar]
- Sun, H.; Zhang, W.; Yang, G.; Xu, Y.; Suo, C. DC high voltage electricity inspection device based on vibration capacitance sensor. Ferroelectrics 2019, 548, 150–164. [Google Scholar] [CrossRef]
- Suo, C.; Sun, H.; Zhang, W.; Zhou, N.; Chen, W. Adaptive Safety Early Warning Device for Non-contact Measurement of HVDC Electric Field. Electronics 2020, 9, 329. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhang, W.; Tan, X.; Chen, W.; Liang, S.; Suo, C. Research and Experiments on an External Miniaturized VFTO Measurement System. Sensors 2019, 20, 244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suo, C.; Wei, R.; Zhang, W.; Li, Y. Research on the Three-Dimensional Power Frequency Electric Field Measurement System; Hindawi Limited: London, UK, 2021. [Google Scholar]
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2009, 8, 18–28. [Google Scholar] [CrossRef]
- LI, Y.; Gong, Y.F. Suppression of reclosing overcurrent and overvoltage of flexible DC grid. Autom. Electr. Power Syst. 2019, 43, 107–113. [Google Scholar]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.C.; Borle, L.J. Current sensing techniques: A review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Rogowski, W.; Steinhaus, W. Die Messung der magnetischen Spannung. Arch. Elektrotech. 1912, 1, 141–150. [Google Scholar] [CrossRef] [Green Version]
- Costa, F.; Poulichet, P.; Mazaleyrat, F.; Labouré, E. The current sensors in power electronics, a review. EPE J. 2001, 11, 7–18. [Google Scholar] [CrossRef]
- Li, Y.; Guo, Y.C.; Long, Y.; Yao, C.; Mi, Y.; Wu, J. Novel lightning current sensor based on Printed Circuit Board Rogowski coil. In Proceedings of the 2012 International Conference on High Voltage Engineering and Application, Novi Sad, Serbia, 4–6 September 2012; pp. 334–338. [Google Scholar]
- Luciano, A.M.; Savastano, M. Wide band transformer based on a split-conductor current sensor and a Rogowski coil for high current measurement. In Proceedings of the 1995 IEEE Instrumentation and Measurement Technology Conference-IMTC’95, Waltham, MA, USA, 23–26 April 1995; p. 454. [Google Scholar]
- Yamamoto, K.; Ueda, N.; Ametani, A.; Natsuno, D. A study of lightning current distribution at a wind turbine foot: Influence on current measurements using a Rogowski coil. Electr. Eng. Jpn. 2012, 180, 10–17. [Google Scholar] [CrossRef]
- Miyazaki, T.; Tezuka, N. Giant magnetic tunneling effect in Fe/Al2O3/Fe junction. J. Magn. Magn. Mater. 1995, 139, L231–L234. [Google Scholar] [CrossRef]
- Sanchez, J.; Ramirez, D.; Ravelo, S.I.; Lopes, A.; Cardoso, S.; Ferreira, R.; Freitas, P.P. Electrical Characterization of a Magnetic Tunnel Junction Current Sensor for Industrial Applications. IEEE Trans. Magn. 2012, 48, 2823–2826. [Google Scholar] [CrossRef]
- Karrer, N.; Hofer-Noser, P.; Henrard, D. HOKA: A new isolated current measuring principle and its features. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference. Thirty-Forth IAS Annual Meeting (Cat. No. 99CH36370), Phoenix, AZ, USA, 3–7 October 1999; Volume 3, pp. 2121–2128. [Google Scholar]
- Troster, N.; Dominkovic, B.; Wolfle, J.; Fischer, M.; Roth-Stielow, J. Wide bandwidth current probe for power electronics using tunneling magnetoresistance sensors. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; pp. 35–40. [Google Scholar]
- Mukhopadhyay, S.C.; Mason, A. Smart Sensors, Measurement and Instrumentation; School of Engineering and Advanced Technology: Auckland, New Zealand, 2013. [Google Scholar]
- Metwally, I.A. Design of different self-integrating and differentiating Rogowski coils for measuring large-magnitude fast impulse currents. IEEE Trans. Instrum. Meas. 2013, 62, 2303–2313. [Google Scholar] [CrossRef]
- Hlavacek, J.; Prochazka, R.; Knenicky, M.; Draxler, K.; Styblikova, R. Influence of Rogowski coil shielding to measurement results. In Proceedings of the 2016 17th International Scientific Conference on Electric Power Engineering (EPE), Prague, Czech Republic, 16–18 May 2016; pp. 1–5. [Google Scholar]
- Murtaza, G.; Lehtonen, M.; Tkk, A.E. Modeling of Rogowski coil for On-line PD Monitoring in Covered-Conductor Overhead Distribution Networks. In Proceedings of the CIRED 19th International Conference on Electricity Distribution, Vienna, Austria, 21–24 May 2007. [Google Scholar]
- Hashmi, G.M.; Lehtonen, M.; Nordman, M. Calibration of on-line partial discharge measuring system using Rogowski coil in covered-conductor overhead distribution networks. IET Sci. Meas. Technol. 2011, 5, 5–13. [Google Scholar] [CrossRef]
- Habrych, M.; Wisniewski, G.; Miedziński, B.; Lisowiec, A.; Fjałkowski, Z. HDI PCB Rogowski coils for automated electrical power system applications. IEEE Trans. Power Deliv. 2017, 33, 1536–1544. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Width of winding wire | 0.1 mm |
| Thickness of winding wire | 0.035 mm |
| Number of winding turns | 30 |
| Inner diameter of winding | 7 mm |
| Inner diameter of winding | 15 mm |
| Outer diameter of winding | 15 mm |
| Winding length | 0.4 m |
| Cross-sectional area of winding |
| Parameters | Values |
|---|---|
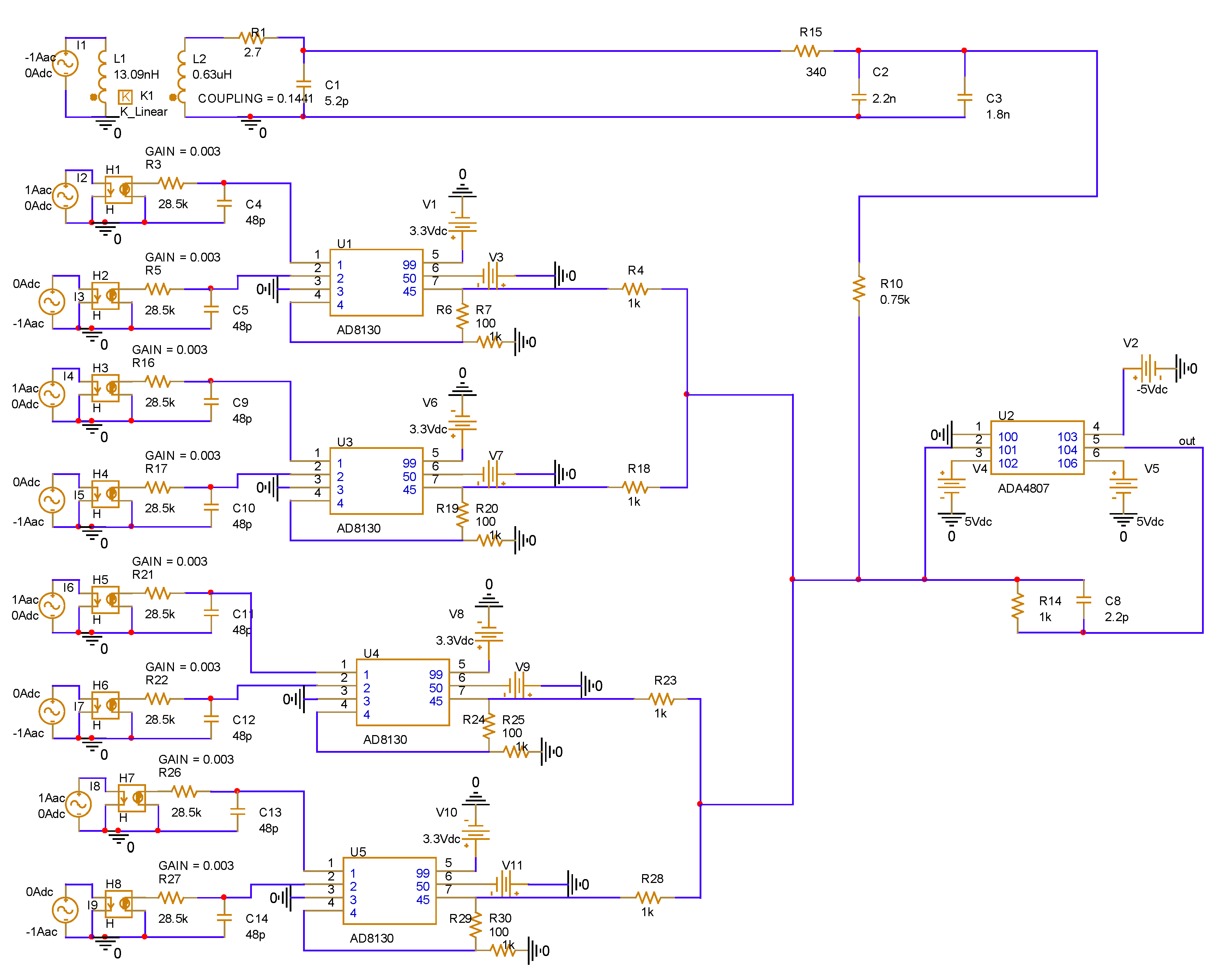
| lumped resistance | 2.7 Ω |
| lumped inductance | 0.63 μH |
| lumped stray capacitance | 5.2 pF |
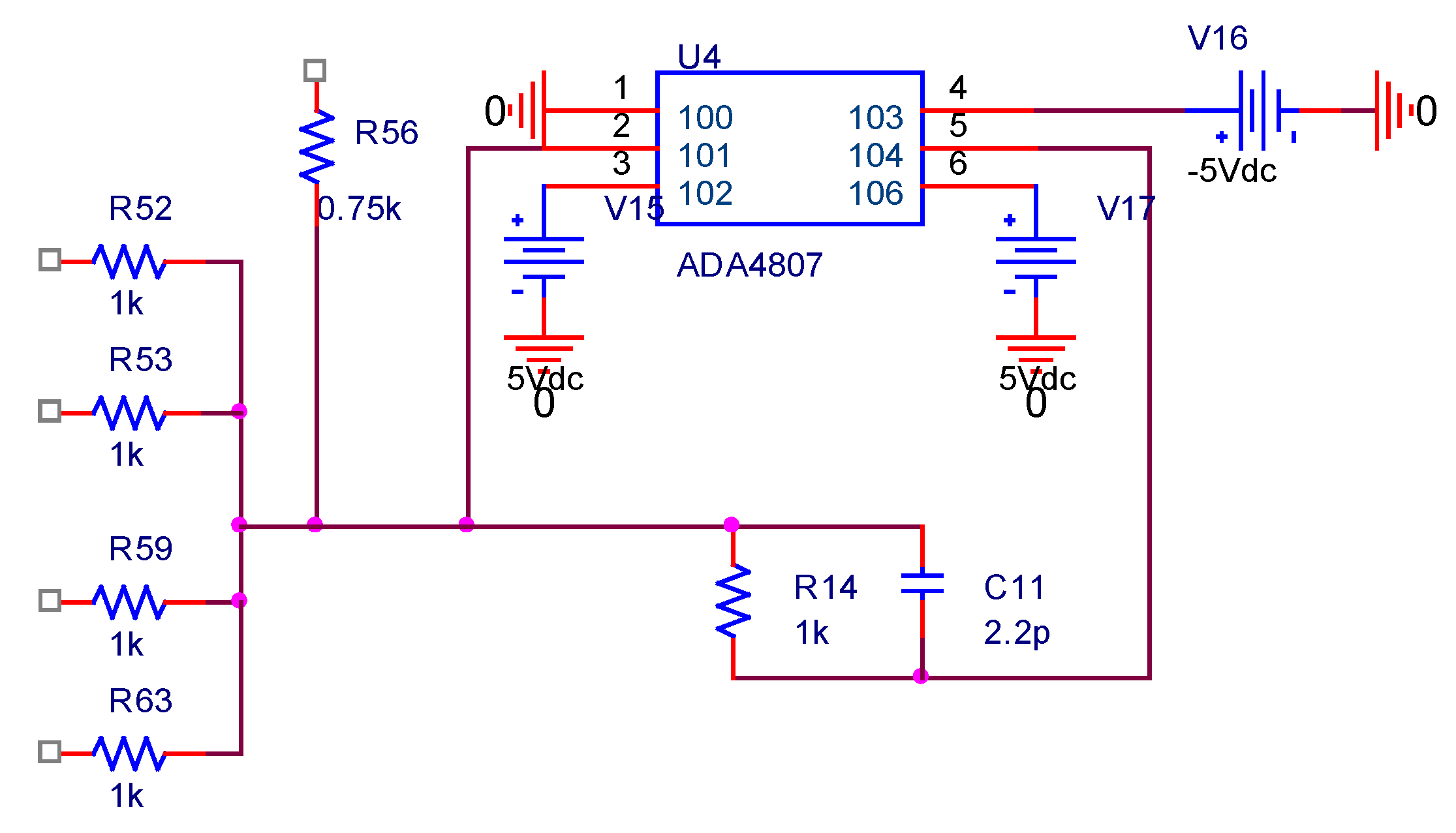
| 1 kΩ | 1 kΩ | 1 kΩ | 1 kΩ | 0.75 kΩ | 1 kΩ | 2.2 pF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, X.; Li, W.; Xu, X.; Ao, G.; Zhou, F.; Zhao, J.; Tan, Q.; Zhang, W. Contactless AC/DC Wide-Bandwidth Current Sensor Based on Composite Measurement Principle. Sensors 2022, 22, 7979. https://0-doi-org.brum.beds.ac.uk/10.3390/s22207979
Tan X, Li W, Xu X, Ao G, Zhou F, Zhao J, Tan Q, Zhang W. Contactless AC/DC Wide-Bandwidth Current Sensor Based on Composite Measurement Principle. Sensors. 2022; 22(20):7979. https://0-doi-org.brum.beds.ac.uk/10.3390/s22207979
Chicago/Turabian StyleTan, Xiangyu, Wenyun Li, Xiaowei Xu, Gang Ao, Fangrong Zhou, Jingjing Zhao, Qinghua Tan, and Wenbin Zhang. 2022. "Contactless AC/DC Wide-Bandwidth Current Sensor Based on Composite Measurement Principle" Sensors 22, no. 20: 7979. https://0-doi-org.brum.beds.ac.uk/10.3390/s22207979