A Disturbance Rejection Control Strategy of a Single Converter Hybrid Electrical System Integrating Battery Degradation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
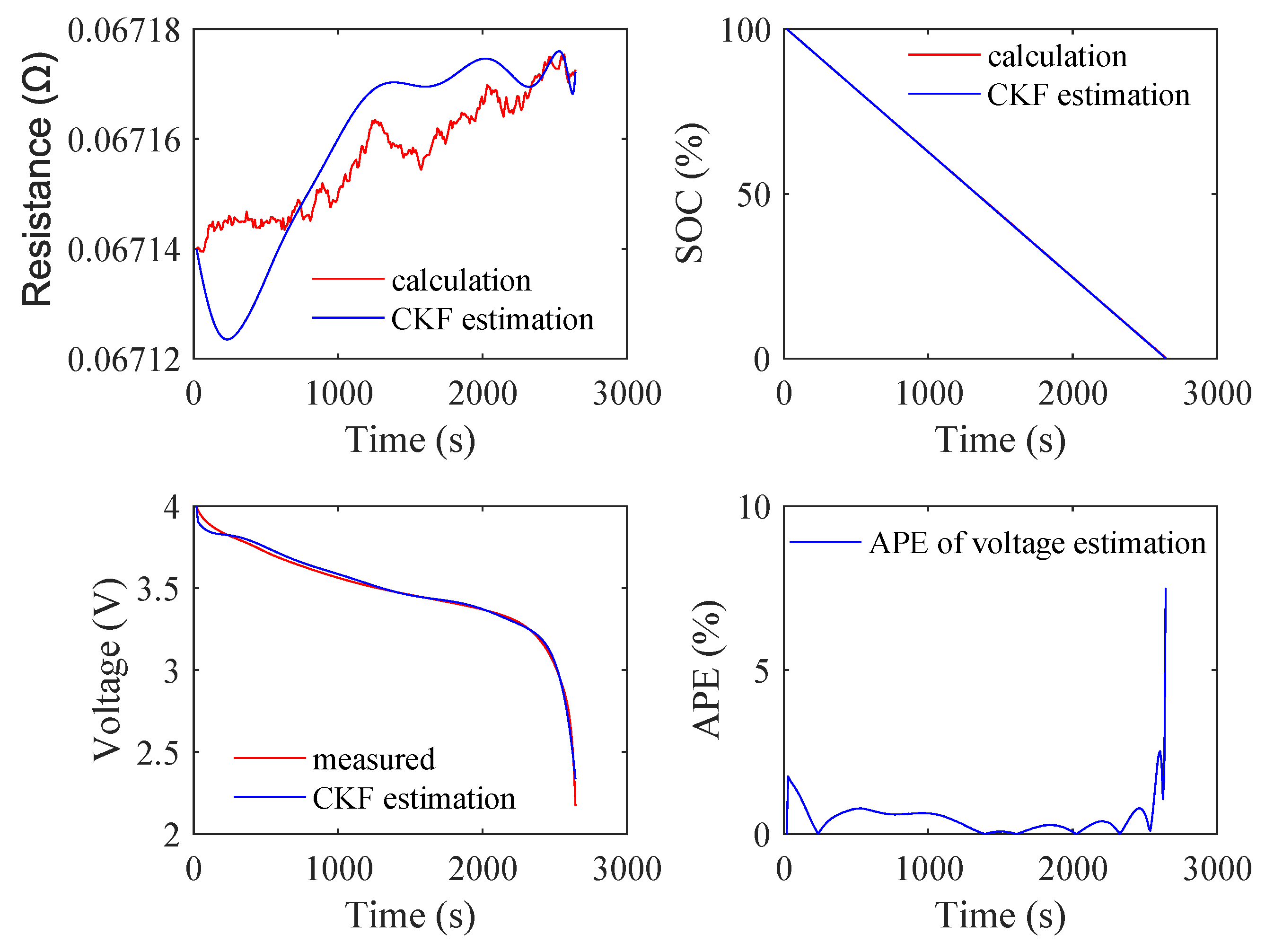
- The degradation of the battery is estimated based on the battery degradation model and the Cubature Kalman Filter (CKF). The CKF can effectively provide battery aging status, and the estimated degradation state can be applied in the control design of the hybrid system.
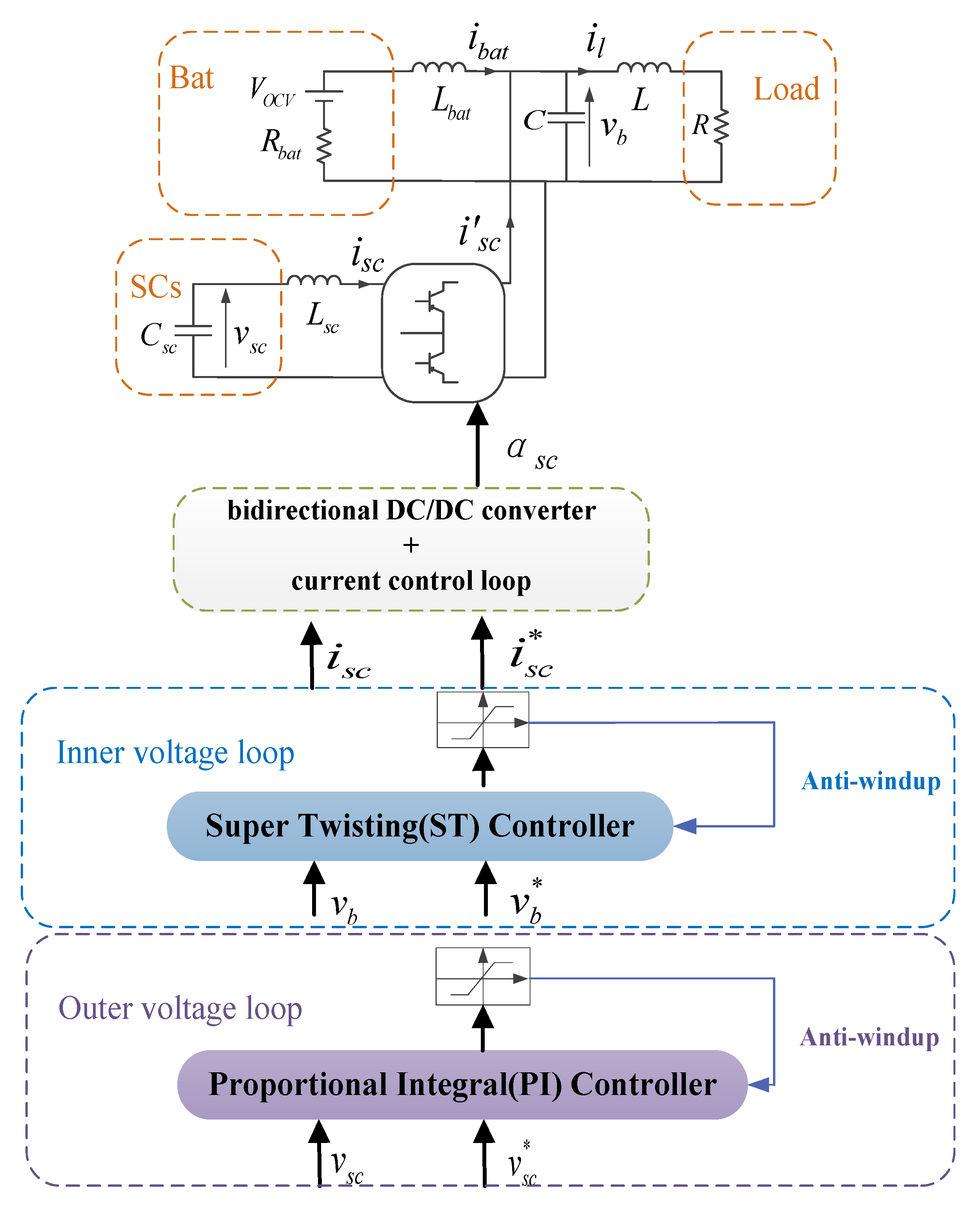
- A cascaded voltage control loop is designed based on the Super Twisting (ST) controller and the Proportional Integral (PI) controller for the single converter hybrid electrical system considering the degradation of the battery. Moreover, the constraints of the battery and supercapacitors are integrated in the anti-windup schemes for protection purposes.
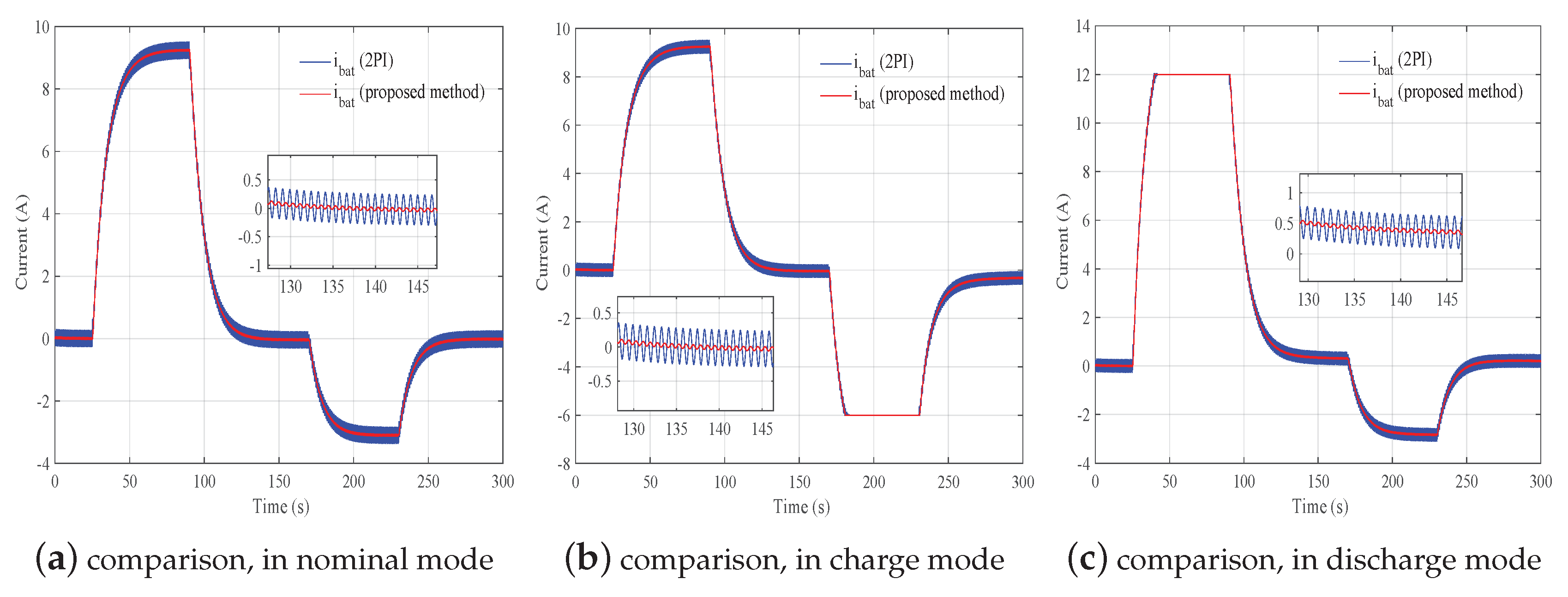
- The effectiveness of the proposed control strategy is validated by simulations in three operation modes and different State Of Charge (SOC) conditions. Besides, the comparison simulation is done between the proposed control strategy and the method of two PI controllers. It shows that the proposed control strategy has good robustness and operates like a low-pass filter, which can be applied in rejecting the disturbance for the hybrid system in this paper.
2. Battery Degradation
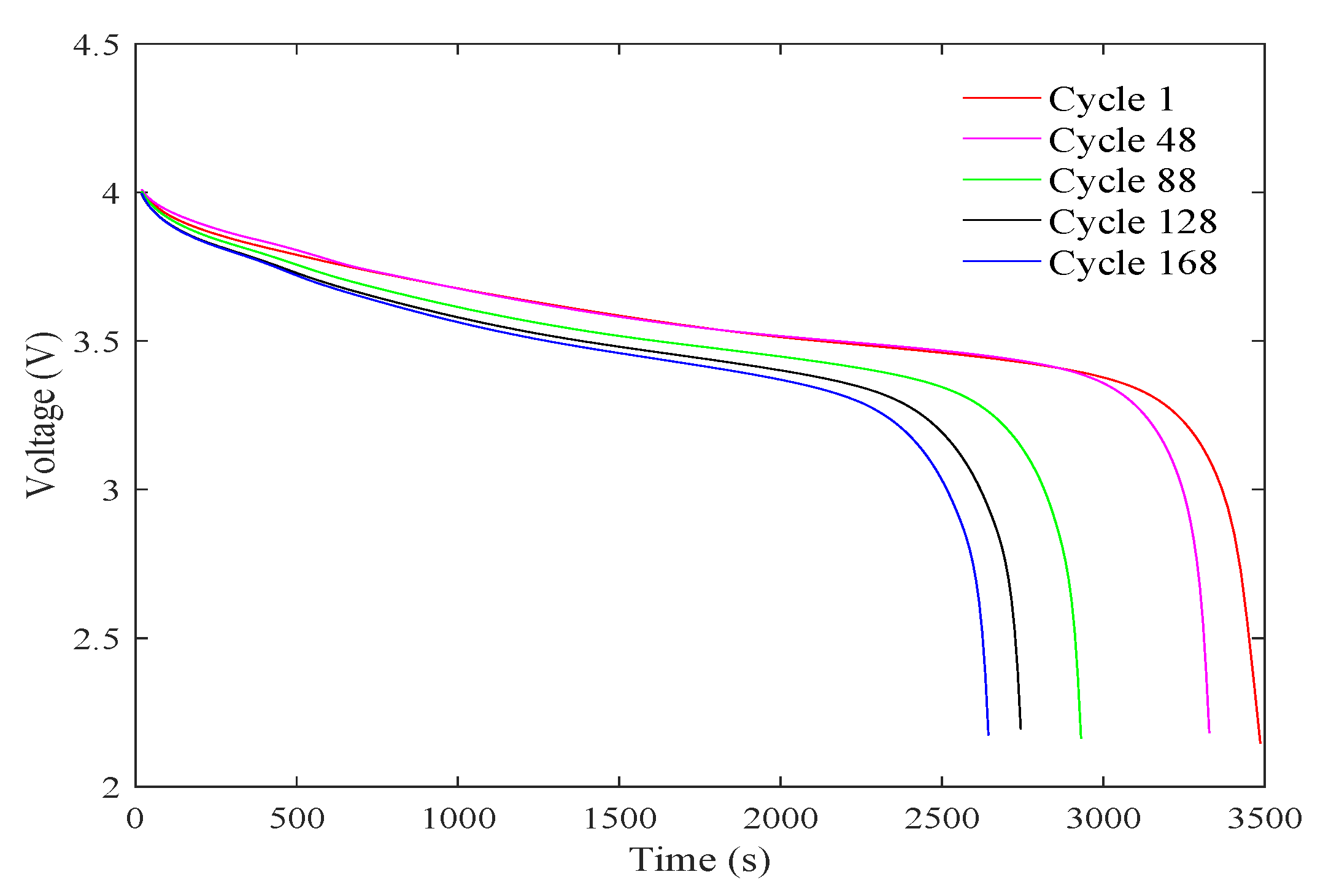
2.1. Battery Degradation Experiment
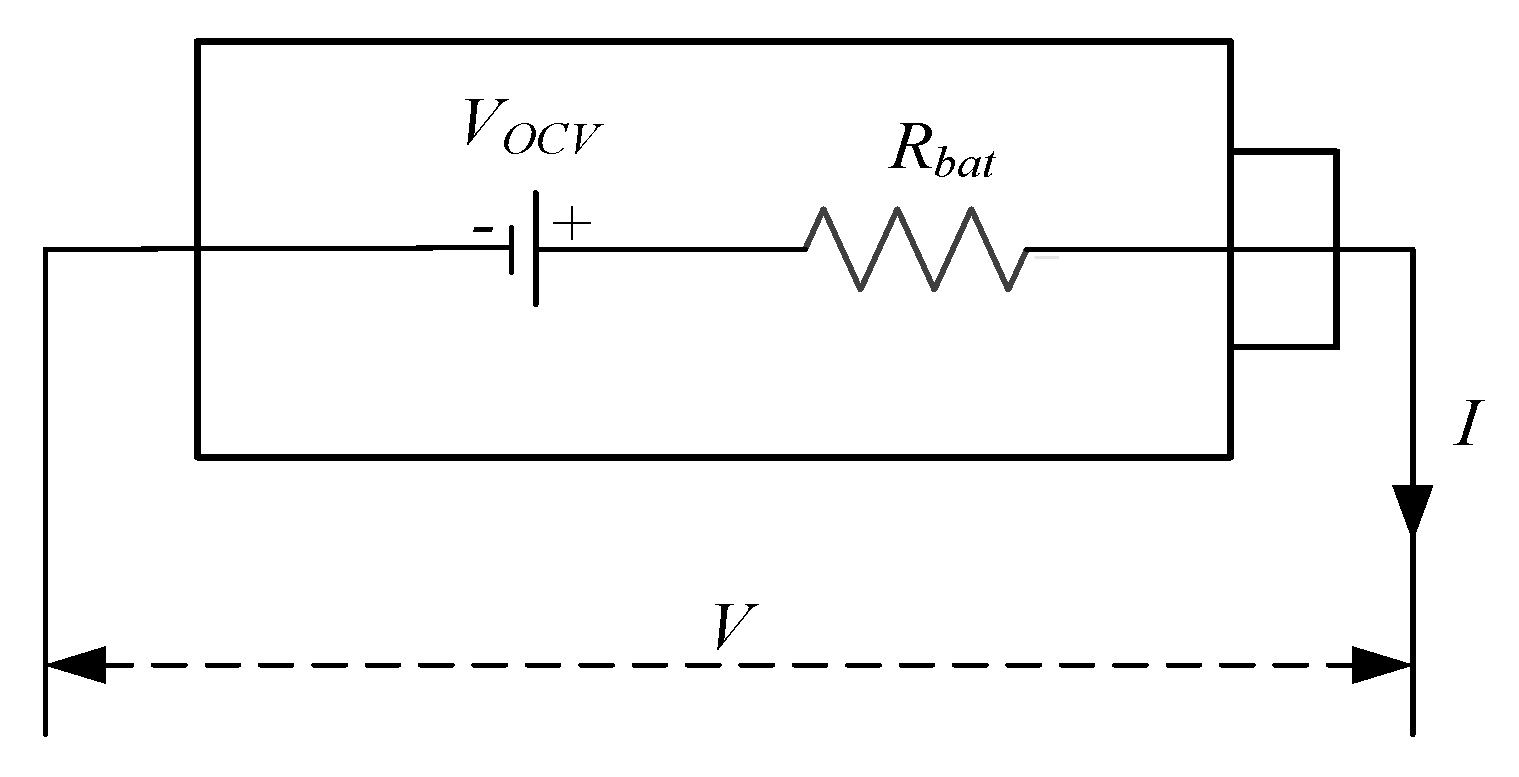
2.2. Battery Degradation Model
2.3. Degradation Estimation Based on the Cubature Kalman Filter
3. Control Strategy for the Hybrid System
3.1. Control Structure of the Hybrid Power System
3.2. Inner Voltage Loop
3.3. Outer Voltage Loop
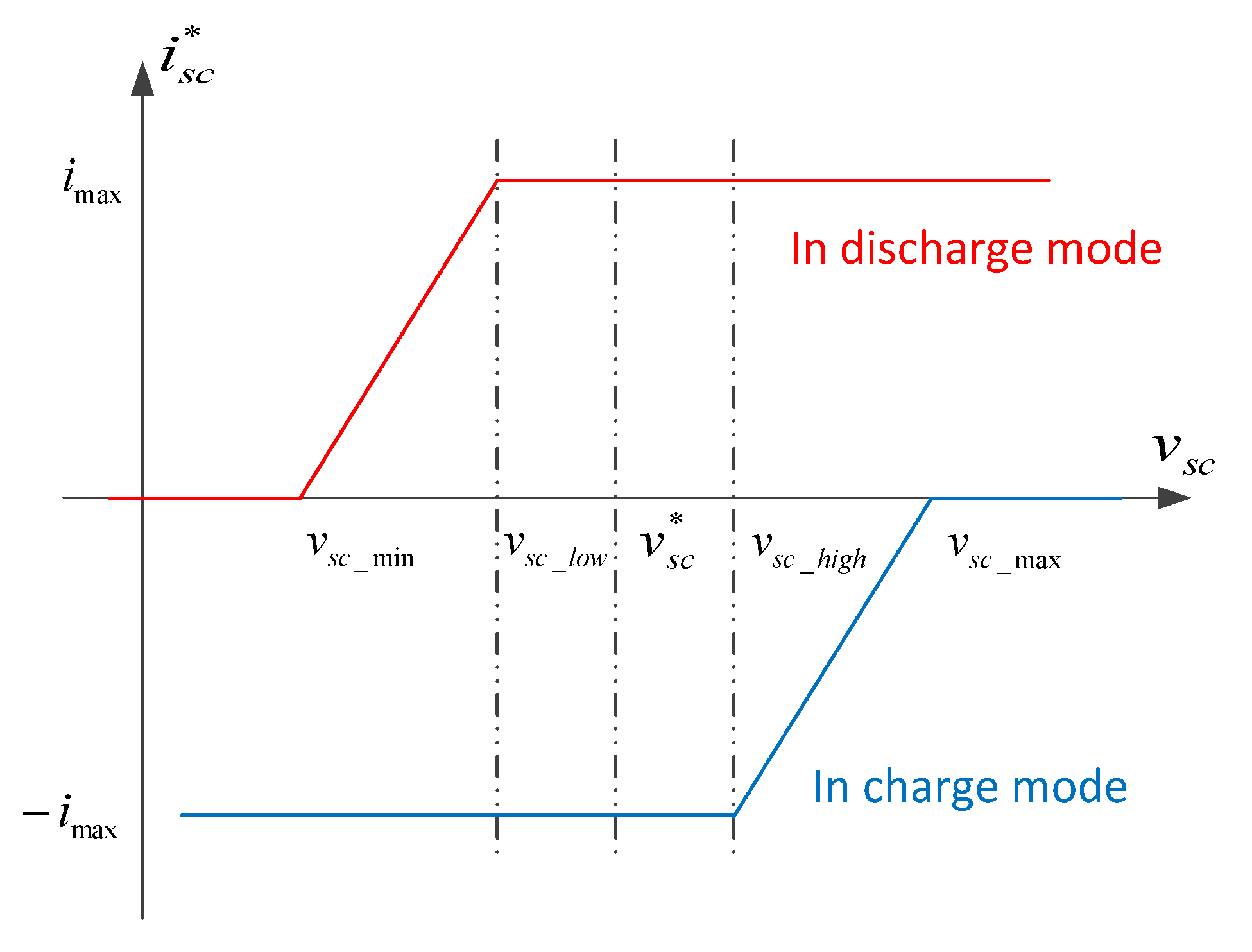
3.4. Constraints of the Hybrid Power System
4. Simulation Results and Analysis
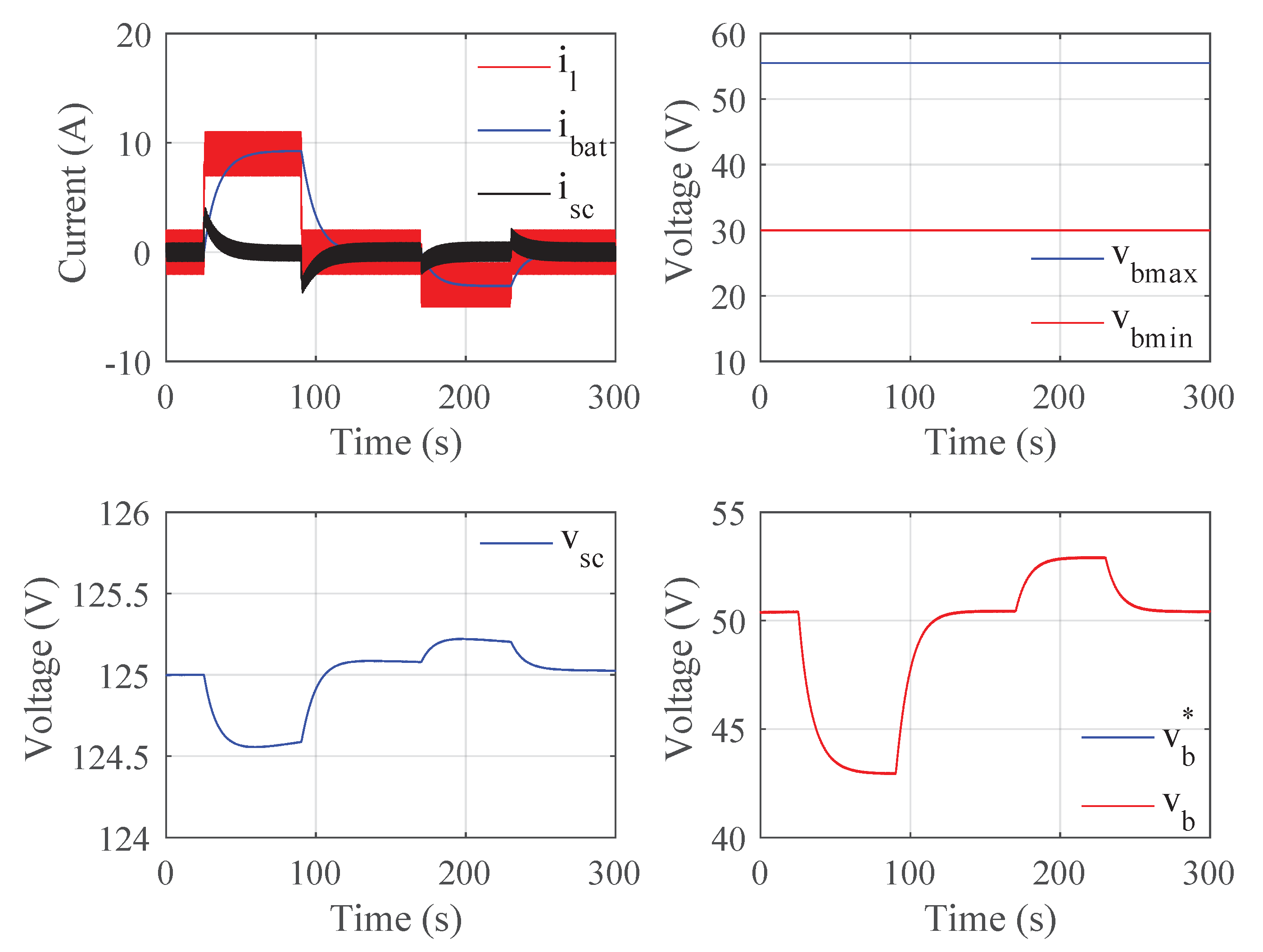
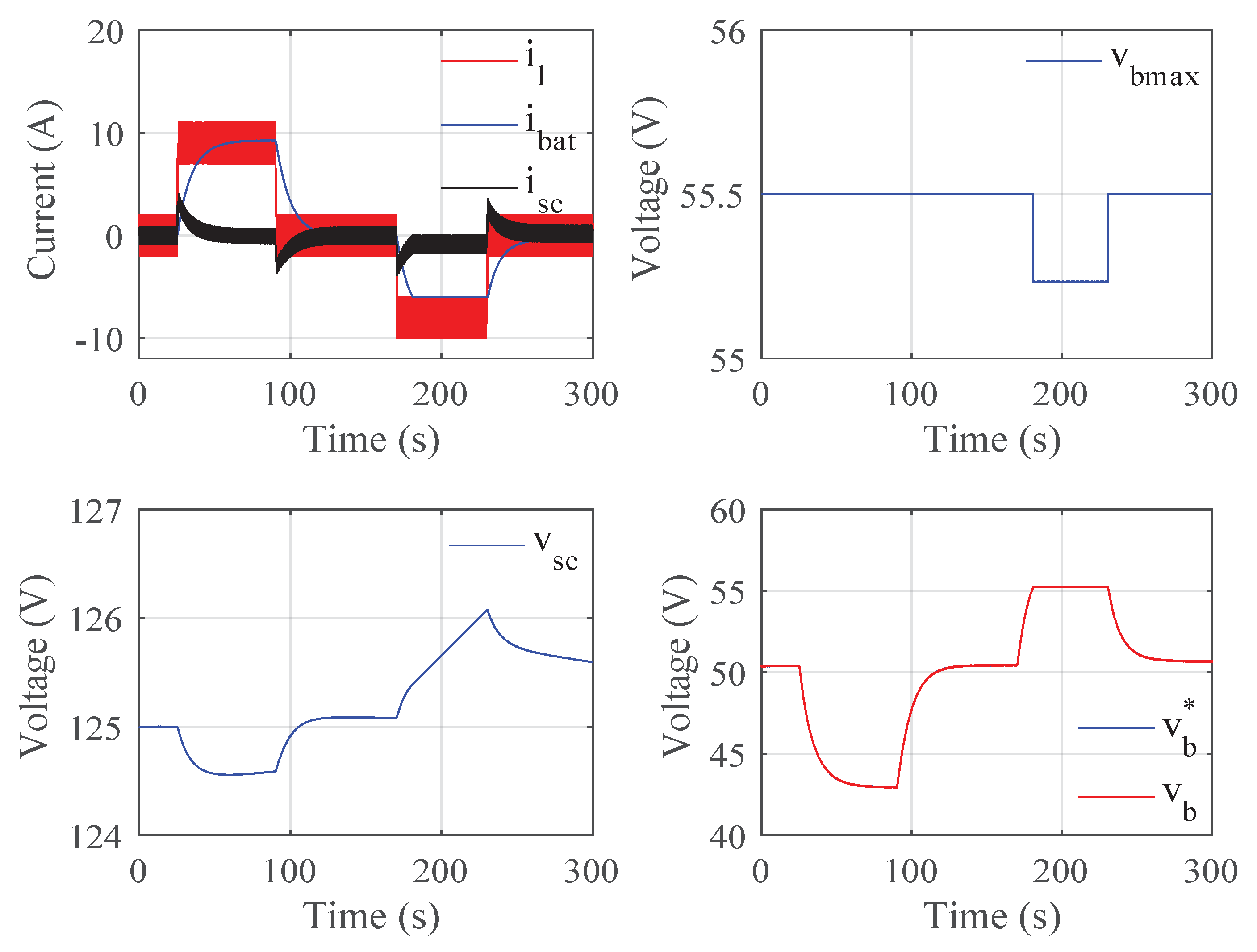
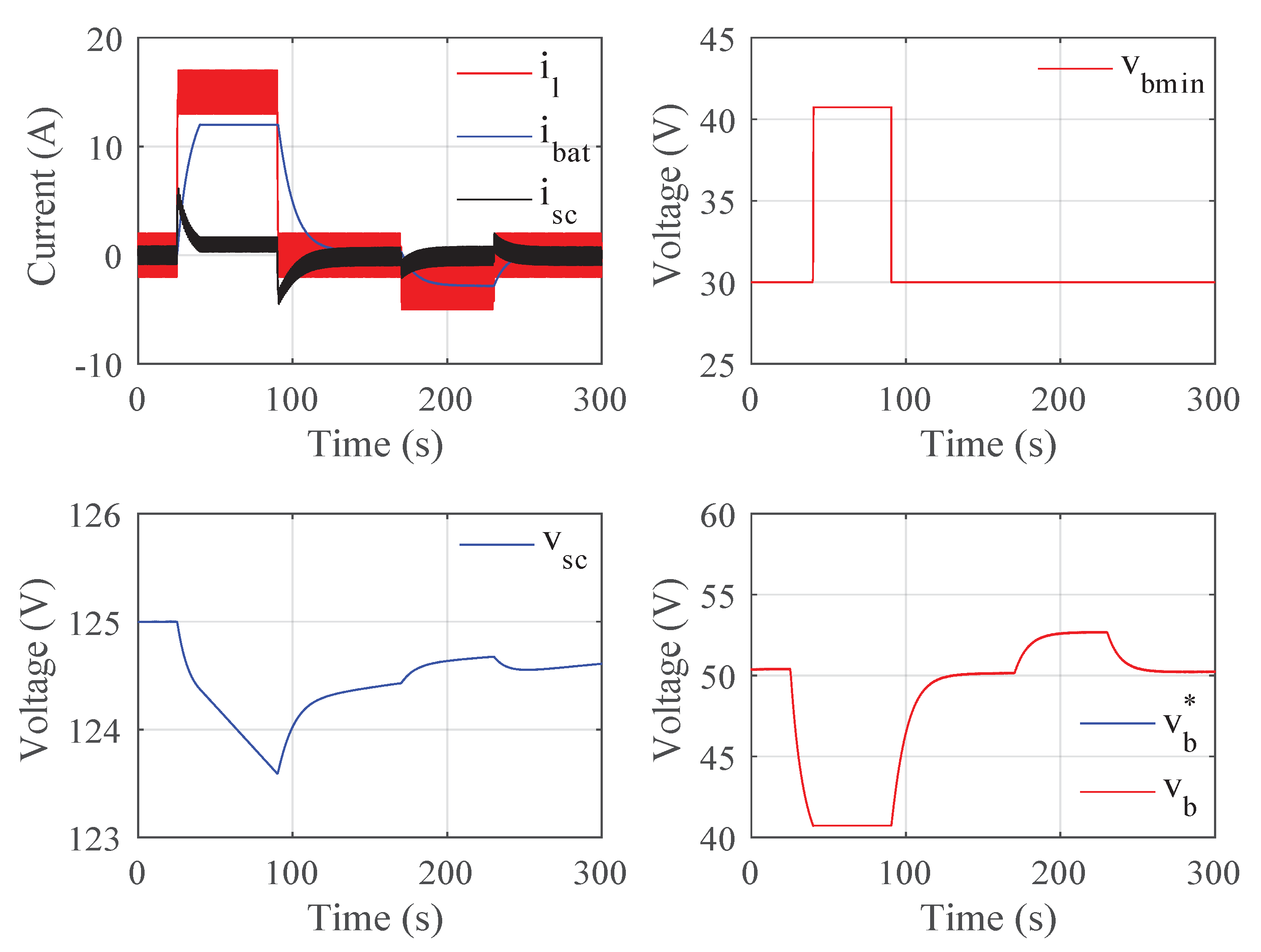
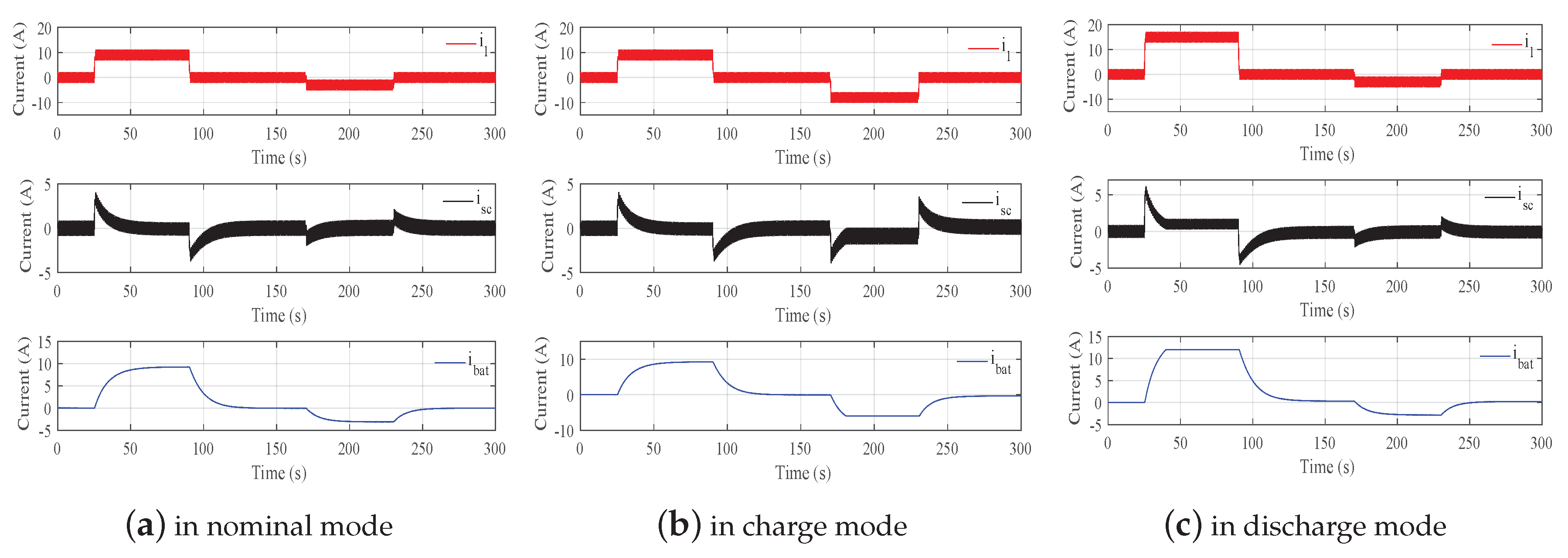
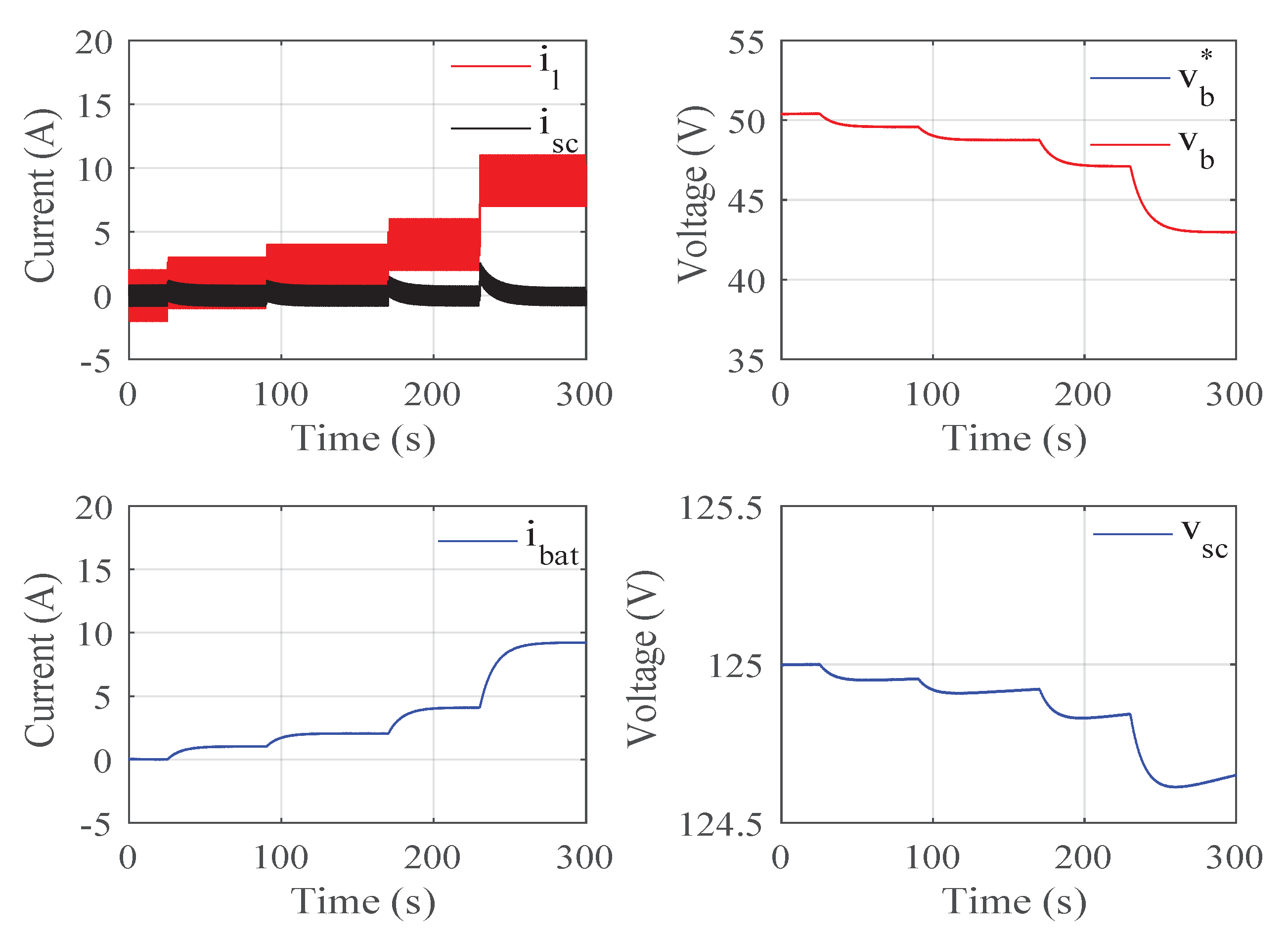
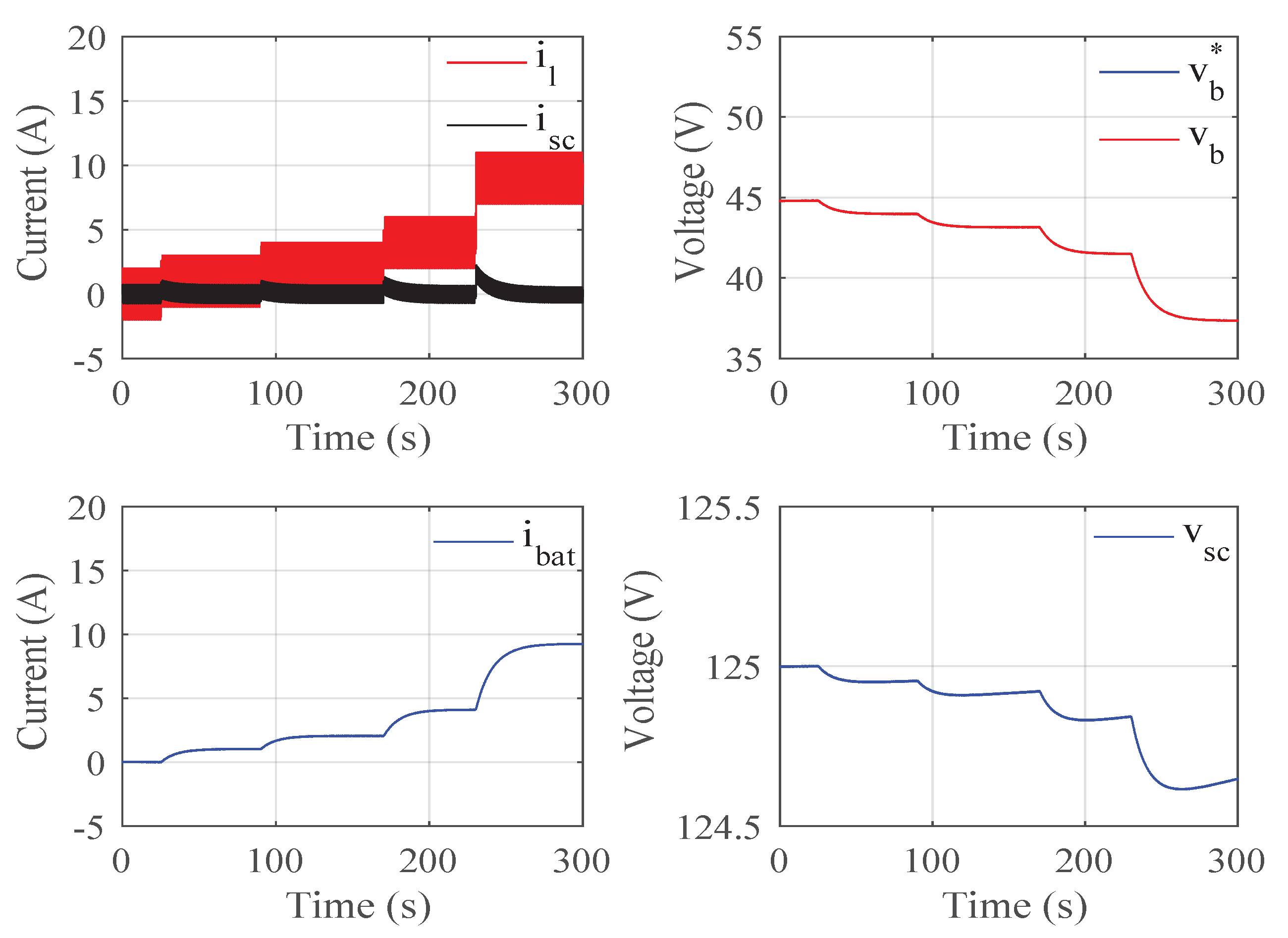
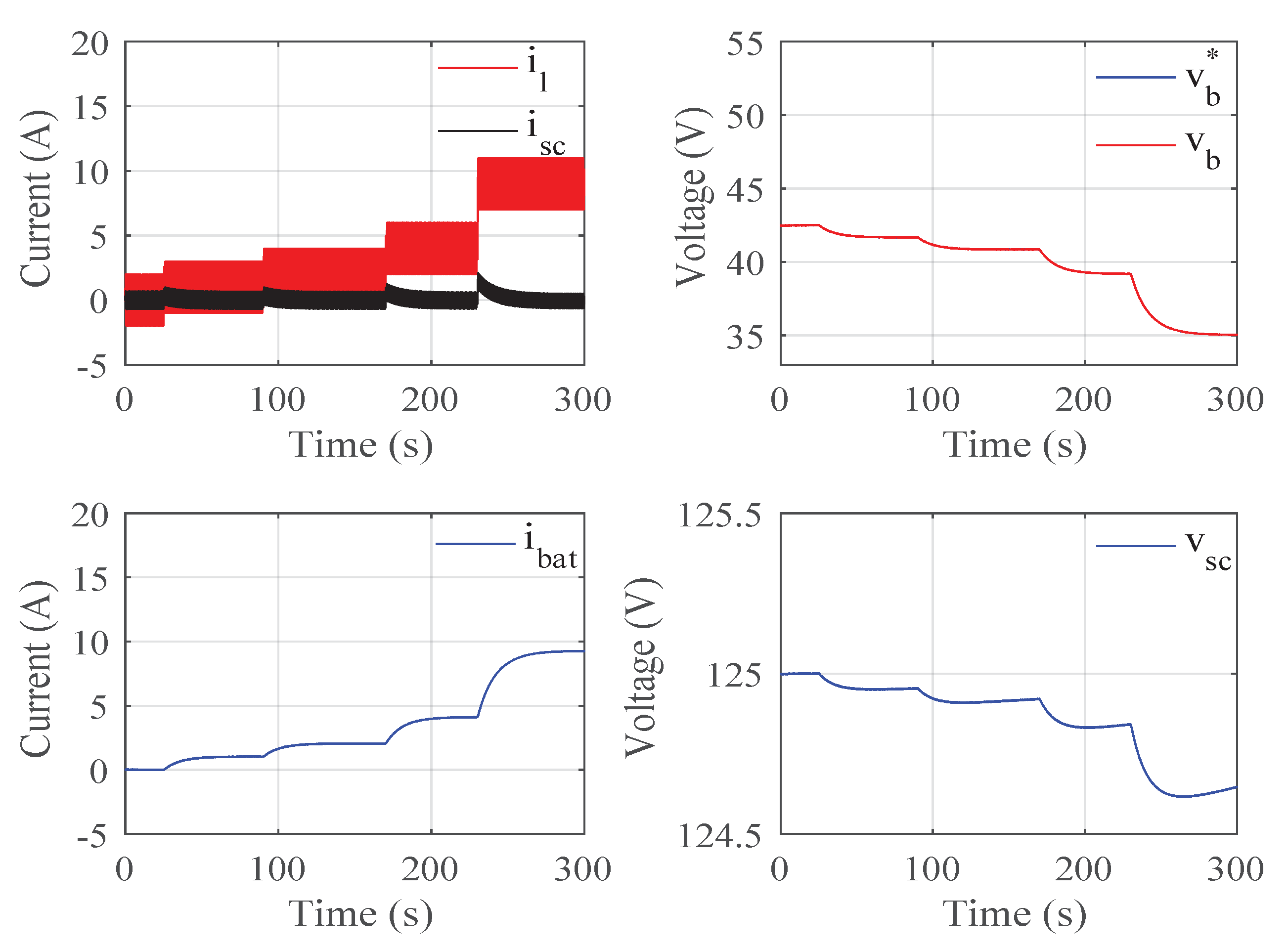
4.1. Simulation of the Proposed Control Strategy under Three Operation Modes
4.2. Simulation of the Proposed Control Strategy with Different SOC Conditions
4.3. Comparison Analysis of the Proposed Control Strategy with the Method of Two PI Controllers
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CKF | Cubature Kalman Filter |
| ST | Super Twisting |
| PI | Proportional Integral |
| SOC | State Of Charge |
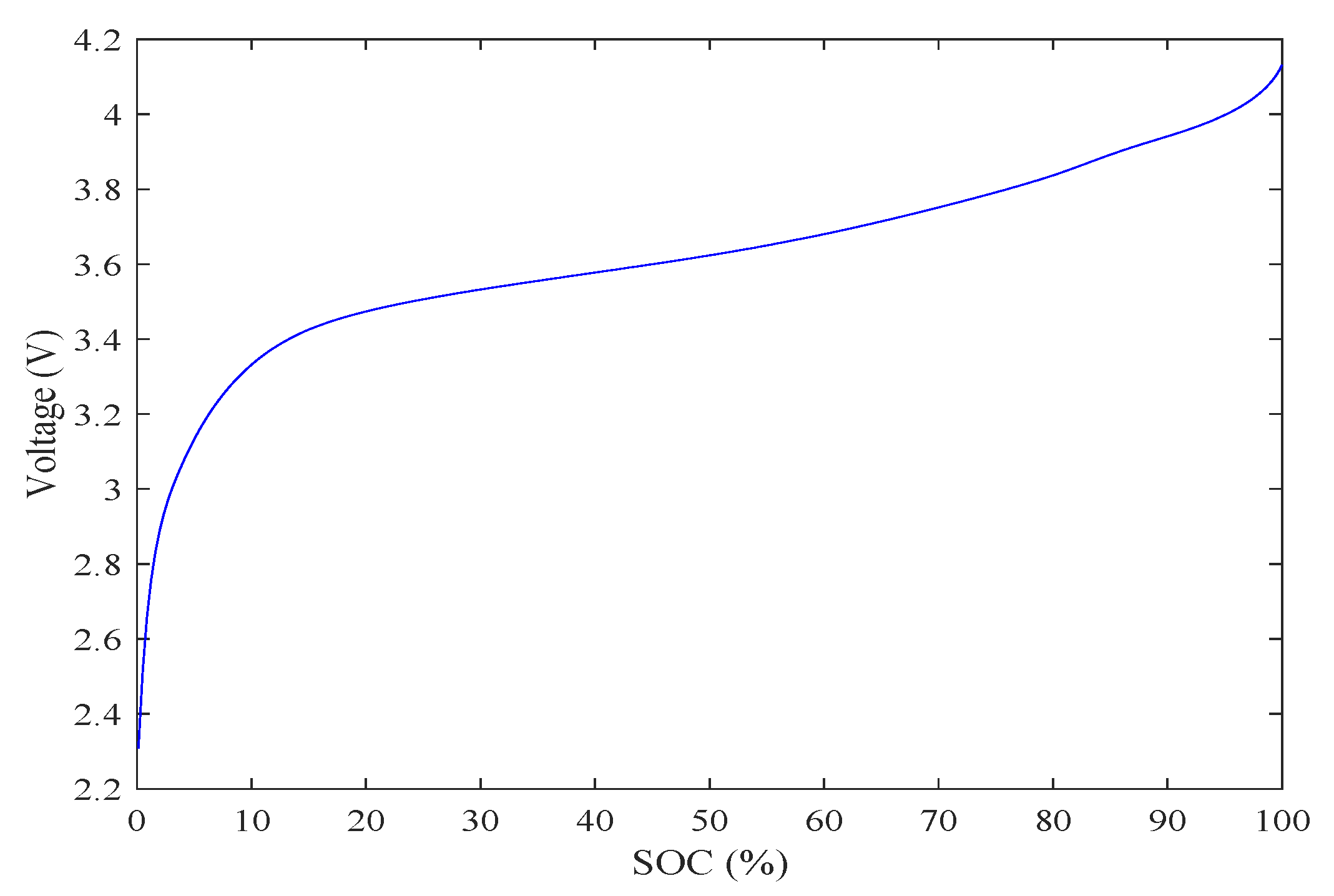
| OCV | Open Circuit Voltage |
| APE | Absolute Percentage Error |
Appendix A


Appendix B
- (1)
- Initialization: initialize the system state and covariance:
- (2)
- Cubature points’ calculation:where n is the dimension of the state variable and is a set of cubature points.where is a unit matrix.
- (3)
- Cubature points’ propagation:
- (4)
- State prediction:
- (5)
- Cubature points’ calculation:
- (6)
- Cubature points’ propagation:
- (7)
- Measurement update:
- (8)
- The state and covariance update: update the Kalman gain , the state , and covariance :
References
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Magnetic Field during Wireless Charging in an Electric Vehicle According to Standard SAE J2954. Energies 2019, 12, 1795. [Google Scholar] [CrossRef] [Green Version]
- Faessler, B.; Schuler, M.; Preißinger, M.; Kepplinger, P. Battery storage systems as grid-balancing measure in low-voltage distribution grids with distributed generation. Energies 2017, 10, 2161. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Kong, F.; Liu, X.; Peng, Y.; Wang, Q. A review on electric vehicles interacting with renewable energy in smart grid. Renew. Sustain. Energy Rev. 2015, 51, 648–661. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, B.; Stoliarov, S.I.; Sun, J. A review of lithium ion battery failure mechanisms and fire prevention strategies. Prog. Energy Combust. Sci. 2019, 73, 95–131. [Google Scholar] [CrossRef]
- Solanke, T.U.; Ramachandaramurthy, V.K.; Yong, J.Y.; Pasupuleti, J.; Kasinathan, P.; Rajagopalan, A. A review of strategic charging–discharging control of grid-connected electric vehicles. J. Energy Storage 2020, 28, 101193. [Google Scholar] [CrossRef]
- Moncecchi, M.; Brivio, C.; Mandelli, S.; Merlo, M. Battery Energy Storage Systems in Microgrids: Modeling and Design Criteria. Energies 2020, 13, 2006. [Google Scholar] [CrossRef] [Green Version]
- Marzougui, H.; Amari, M.; Kadri, A.; Bacha, F.; Ghouili, J. Energy management of fuel cell/battery/ultracapacitor in electrical hybrid vehicle. Int. J. Hydrog. Energy 2017, 42, 8857–8869. [Google Scholar] [CrossRef]
- Lencwe, M.J.; Chowdhury, S.P.; Olwal, T.O. A multi-stage approach to a hybrid lead acid battery and supercapacitor system for transport vehicles. Energies 2018, 11, 2888. [Google Scholar] [CrossRef] [Green Version]
- Vinot, E.; Trigui, R. Optimal energy management of HEVs with hybrid storage system. Energy Convers. Manag. 2013, 76, 437–452. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Wang, D.; Wang, B.; Tong, F. Battery Degradation Minimization-Oriented Hybrid Energy Storage System for Electric Vehicles. Energies 2020, 13, 246. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Park, G.S.; Kim, H.J. Online Remaining Useful Life Prediction for Lithium-Ion Batteries Using Partial Discharge Data Features. Energies 2019, 12, 4366. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Kamran, M.A.; Kumar, P.S.; Nengroo, S.H.; Khan, M.A.; Hussain, A.; Kim, H.J. An online data-driven model identification and adaptive state of charge estimation approach for lithium-ion-batteries using the lagrange multiplier method. Energies 2018, 11, 2940. [Google Scholar] [CrossRef] [Green Version]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Zhang, X.; Wang, J.; Shu, H.; Li, S.; He, T.; Lan, C.; Yu, T. Applications of battery/supercapacitor hybrid energy storage systems for electric vehicles using perturbation observer based robust control. J. f Power Sources 2020, 448, 227444. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Li, F. Optimization of energy management strategy and sizing in hybrid storage system for tram. Energies 2018, 11, 752. [Google Scholar] [CrossRef] [Green Version]
- Miniguano, H.; Barrado, A.; Fernández, C.; Zumel, P.; Lázaro, A. A General Parameter Identification Procedure Used for the Comparative Study of Supercapacitors Models. Energies 2019, 12, 1776. [Google Scholar] [CrossRef] [Green Version]
- Kouchachvili, L.; Yaïci, W.; Entchev, E. Hybrid battery/supercapacitor energy storage system for the electric vehicles. Journal of Power Sources 2018, 374, 237–248. [Google Scholar] [CrossRef]
- Hilairet, M.; Bethoux, O.; Azib, T.; Talj, R. Interconnection and damping assignment passivity-based control of a fuel cell system. In Proceedings of the IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 219–224. [Google Scholar]
- Azib, T.; Bethoux, O.; Remy, G.; Marchand, C. Structure and control strategy for a parallel hybrid fuel cell/supercapacitors power source. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 1858–1863. [Google Scholar]
- Bambang, R.T.; Rohman, A.S.; Dronkers, C.J.; Ortega, R.; Sasongko, A. Energy management of fuel cell/battery/supercapacitor hybrid power sources using model predictive control. IEEE Trans. Ind. Inform. 2014, 10, 1992–2002. [Google Scholar]
- Kong, S.; Hilairet, M.; Roche, R. Passivity-Based Control for a PV/Battery/Fuel Cell/Electrolyser Hybrid Power System. In Proceedings of the IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Mohammedi, M.; Kraa, O.; Becherif, M.; Aboubou, A.; Ayad, M.; Bahri, M. Fuzzy logic and passivity-based controller applied to electric vehicle using fuel cell and supercapacitors hybrid source. Energy Procedia 2014, 50, 619–626. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Liu, X.; Ji, H.; Hou, Z.; Fan, L. Multi-Agent-Based Data-Driven Distributed Adaptive Cooperative Control in Urban Traffic Signal Timing. Energies 2019, 12, 1402. [Google Scholar] [CrossRef] [Green Version]
- Hou, Z.; Chi, R.; Gao, H. An overview of dynamic-linearization-based data-driven control and applications. IEEE Trans. Ind. Electron. 2016, 64, 4076–4090. [Google Scholar] [CrossRef]
- Hou, Z.S.; Wang, Z. From model-based control to data-driven control: Survey, classification and perspective. Inf. Sci. 2013, 235, 3–35. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Bojan-Dragos, C.A.; Szedlak-Stinean, A.I. Combined Model-Free Adaptive Control with Fuzzy Component by Virtual Reference Feedback Tuning for Tower Crane Systems. Procedia Comput. Sci. 2019, 162, 267–274. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control Syst. Technol. 2010, 19, 1549–1558. [Google Scholar] [CrossRef]
- Yoshio, M.; Brodd, R.J.; Kozawa, A. Lithium-Ion Batteries; Springer: Berlin/Heidelberg, Germany, 2009; Volume 1. [Google Scholar] [CrossRef]
- Jin, X.; Vora, A.; Hoshing, V.; Saha, T.; Shaver, G.; Wasynczuk, O.; Varigonda, S. Applicability of available Li-ion battery degradation models for system and control algorithm design. Control Eng. Pract. 2018, 71, 1–9. [Google Scholar] [CrossRef]
- Li, J.; Landers, R.G.; Park, J. A comprehensive single-particle-degradation model for battery state-of-health prediction. J. Power Sources 2020, 456, 227950. [Google Scholar] [CrossRef]
- Park, J.; Lee, M.; Kim, G.; Park, S.; Kim, J. Integrated Approach Based on Dual Extended Kalman Filter and Multivariate Autoregressive Model for Predicting Battery Capacity Using Health Indicator and SOC/SOH. Energies 2020, 13, 2138. [Google Scholar] [CrossRef]
- Wang, F.K.; Mamo, T. A hybrid model based on support vector regression and differential evolution for remaining useful lifetime prediction of lithium-ion batteries. J. Power Sources 2018, 401, 49–54. [Google Scholar] [CrossRef]
- Chen, L.; Xu, L.; Zhou, Y. Novel approach for lithium-ion battery on-line remaining useful life prediction based on permutation entropy. Energies 2018, 11, 820. [Google Scholar] [CrossRef] [Green Version]
- Tang, X.; Yao, K.; Liu, B.; Hu, W.; Gao, F. Long-term battery voltage, power, and surface temperature prediction using a model-based extreme learning machine. Energies 2018, 11, 86. [Google Scholar] [CrossRef] [Green Version]
- Abdulla, K.; De Hoog, J.; Muenzel, V.; Suits, F.; Steer, K.; Wirth, A.; Halgamuge, S. Optimal operation of energy storage systems considering forecasts and battery degradation. IEEE Trans. Smart Grid 2016, 9, 2086–2096. [Google Scholar] [CrossRef]
- Wang, D.; Coignard, J.; Zeng, T.; Zhang, C.; Saxena, S. Quantifying electric vehicle battery degradation from driving vs. vehicle-to-grid services. J. Power Sources 2016, 332, 193–203. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wang, Z.; Yan, J. Prognostic health condition for lithium battery using the partial incremental capacity and Gaussian process regression. J. Power Sources 2019, 421, 56–67. [Google Scholar] [CrossRef]
- Li, H.; Ravey, A.; N’Diaye, A.; Djerdir, A. Online adaptive equivalent consumption minimization strategy for fuel cell hybrid electric vehicle considering power sources degradation. Energy Convers. Manag. 2019, 192, 133–149. [Google Scholar] [CrossRef]
- Laghrouche, S.; Harmouche, M.; Chitour, Y. Higher order super-twisting for perturbed chains of integrators. IEEE Trans. Autom. Control 2017, 62, 3588–3593. [Google Scholar] [CrossRef] [Green Version]
- Fridman, L.; Galván-Guerra, R.; Velázquez-Velázquez, J.E.; Iriarte, R. Sliding Modes for Switched Uncertain Linear Time Invariant Systems: An Output Integral Sliding Mode Approach. In New Perspectives and Applications of Modern Control Theory; Springer: Berlin/Heidelberg, Germany, 2018; pp. 153–185. [Google Scholar] [CrossRef]
- Fridman, L.; Plestan, F.; Barbot, J.P. Recent Trends in Sliding Mode Control; IET Digital Library: London, UK, 2016. [Google Scholar] [CrossRef]
- Pérez-Ventura, U.; Fridman, L. Design of super-twisting control gains: A describing function based methodology. Automatica 2019, 99, 175–180. [Google Scholar] [CrossRef]
- Sanchez, T.; Moreno, J.A.; Fridman, L.M. Output feedback continuous twisting algorithm. Automatica 2018, 96, 298–305. [Google Scholar] [CrossRef]
- Torres-González, V.; Sanchez, T.; Fridman, L.M.; Moreno, J.A. Design of continuous twisting algorithm. Automatica 2017, 80, 119–126. [Google Scholar] [CrossRef]
- Boiko, I.M. On frequency-domain criterion of finite-time convergence of second-order sliding mode control algorithms. Automatica 2011, 47, 1969–1973. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Shkolnikov, I.A.; Levant, A. Smooth second-order sliding modes: Missile guidance application. Automatica 2007, 43, 1470–1476. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Battery Data Set. NASA Ames Research Center. 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 29 May 2020).
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for electric vehicle batteries using unscented kalman filtering. Microelectron. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- Luo, J.; Peng, J.; He, H. Lithium-ion battery SOC estimation study based on cubature Kalman filter. Energy Procedia 2019, 158, 3421–3426. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, D.; Shao, X. New version of continuous–discrete cubature Kalman filtering for nonlinear continuous–discrete systems. ISA Trans. 2019, 91, 174–183. [Google Scholar] [CrossRef]
- Peng, J.; Luo, J.; He, H.; Lu, B. An improved state of charge estimation method based on cubature Kalman filter for lithium-ion batteries. Appl. Energy 2019, 253, 113520. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Barth, A.; Reichhartinger, M.; Reger, J.; Horn, M.; Wulff, K. Lyapunov-design for a super-twisting sliding-mode controller using the certainty-equivalence principle. IFAC-PapersOnLine 2015, 48, 860–865. [Google Scholar] [CrossRef]
- Orlov, Y. Finite time stability and robust control synthesis of uncertain switched systems. SIAM J. Control Optim. 2004, 43, 1253–1271. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Obeid, H.; Laghrouche, S.; Hilairet, M.; Djerdir, A. A Disturbance Rejection Control Strategy of a Single Converter Hybrid Electrical System Integrating Battery Degradation. Energies 2020, 13, 2781. https://0-doi-org.brum.beds.ac.uk/10.3390/en13112781
Zhou Y, Obeid H, Laghrouche S, Hilairet M, Djerdir A. A Disturbance Rejection Control Strategy of a Single Converter Hybrid Electrical System Integrating Battery Degradation. Energies. 2020; 13(11):2781. https://0-doi-org.brum.beds.ac.uk/10.3390/en13112781
Chicago/Turabian StyleZhou, Yue, Hussein Obeid, Salah Laghrouche, Mickael Hilairet, and Abdesslem Djerdir. 2020. "A Disturbance Rejection Control Strategy of a Single Converter Hybrid Electrical System Integrating Battery Degradation" Energies 13, no. 11: 2781. https://0-doi-org.brum.beds.ac.uk/10.3390/en13112781