1. Introduction
In the last decades, the development of power electronics has allowed increasing the levels of penetration of renewable energy resources in electricity networks and the creation of new kinds of network concepts as microgrids (MGs) or high-voltage direct current [
1,
2]. The MGs can be operated in alternating current (AC) and direct current (DC); However, the DCMGs present several advantages over AC counterparts, such as:
(i) no need of synchronizing generators,
(ii) less number of power converters,
(iii) lower losses,
(iv) better voltage profiles, and
(v) do not require analysis and controls of reactive power and frequency [
3]. Additionally, the DCMGs go hand-in-hand with the global concerns about the effects of global warming since they reduce greenhouse effects and the cost of energy generation and transportation [
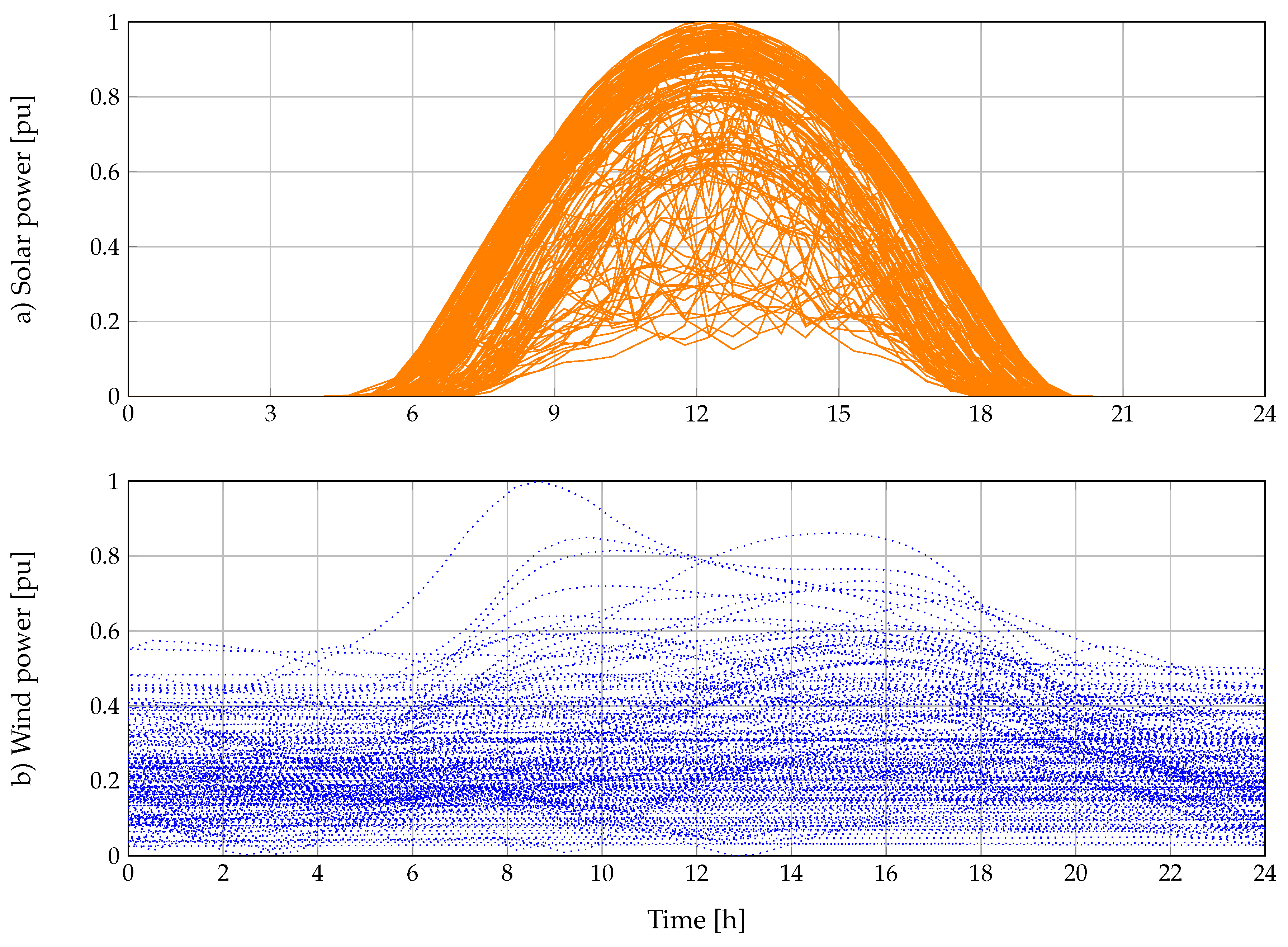
4]. However, the integration of renewable energy resources has a great disadvantage that lies in the great variability of their primary energy resources (e.g., solar radiation or wind speed) [
1]. In order to reduce this disadvantage, the MGs include devices that allow the storage of electrical energy well-known as battery energy storage systems (BESSs) [
5]. The BESSs store energy when there are high generation and low demand and provide power when the MGs present low generation and high demand [
6].
Nowadays, the planning and operation of DCMGs is an important challenge, which is being developed. If the operation of renewable energy sources and BESSs is incorrectly coordinated, this may lead to operational and technical problems, such as voltage profile deterioration, transmission line congestion, increased operating costs, or violations of operational constraints [
7]. For this reason, the optimal operation of devices in DCMGs is an important issue to develop. Here we tackle the economic dispatch renewable energy source (wind and solar power) and the BESSs in DCMGs using second-order cone programming (SOCP), which permits finding the global optimum employing mathematical relaxations [
8,
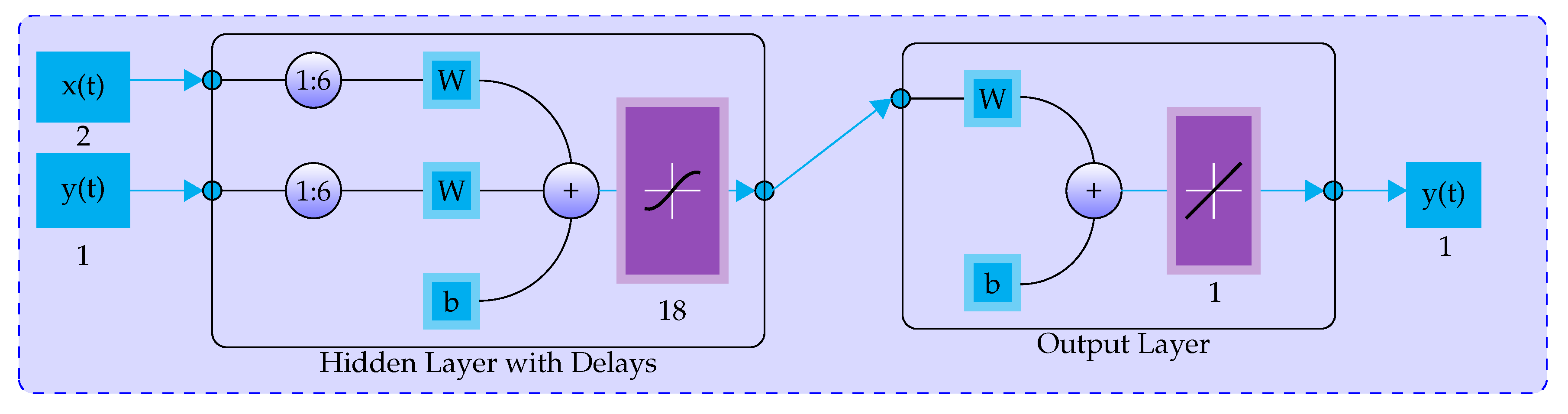
9]. Additionally, this study uses short forecasting based on artificial neural networks to reduce the error the variation of primary sources of renewable energy (wind speed and solar radiation), as reported in [
8].
Several works have been proposed to study this problem. In [
10], A nonlinear optimization model to manage renewable energies and BESSs considering constant power load models were presented. However, the uncertainties of primary sources were not considered in the wind and solar power generations. In [
11,
12], optimal controls for BESSs integrated to ACMGs and renewable energies were proposed. Even though the authors of [
11,
12], considered short forecasting predictions in models, these approaches were solved using a non-convex model which does not guarantee the optimal solution of the problem since this type model many local minimums [
6,
8]. Multiple investigations have also been proposed with the objective of improving the BESSs of MGs, such as multi-agent models based on market decisions [
13], multi-objective particle swarm optimization [
14,
15], heuristic cost-benefit analysis [
16], intelligent control methods [
17], bee colony optimization [
18], and genetic algorithm approaches [
19]. Even these works present a good performance, and they cannot guarantee the optimal global solution to the problem. Due to that, they use the non-linear non-convex model for the economic dispatch problem [
6]. This implies that is possible to find a better configuration by using convex optimization formulations, which permits arriving at the global optimum of problem [
20,
21]. In [
8], a convex optimization formulation based on semidefinite programming (SDP) to operate BESSs and renewable power generation in DCMGs was developed. Unlike this previous work, we employ second-order cone programming (SOCP), which presents some advantages according to the SDP model as low computational cost and exact optimal solutions for some class problems [
21].
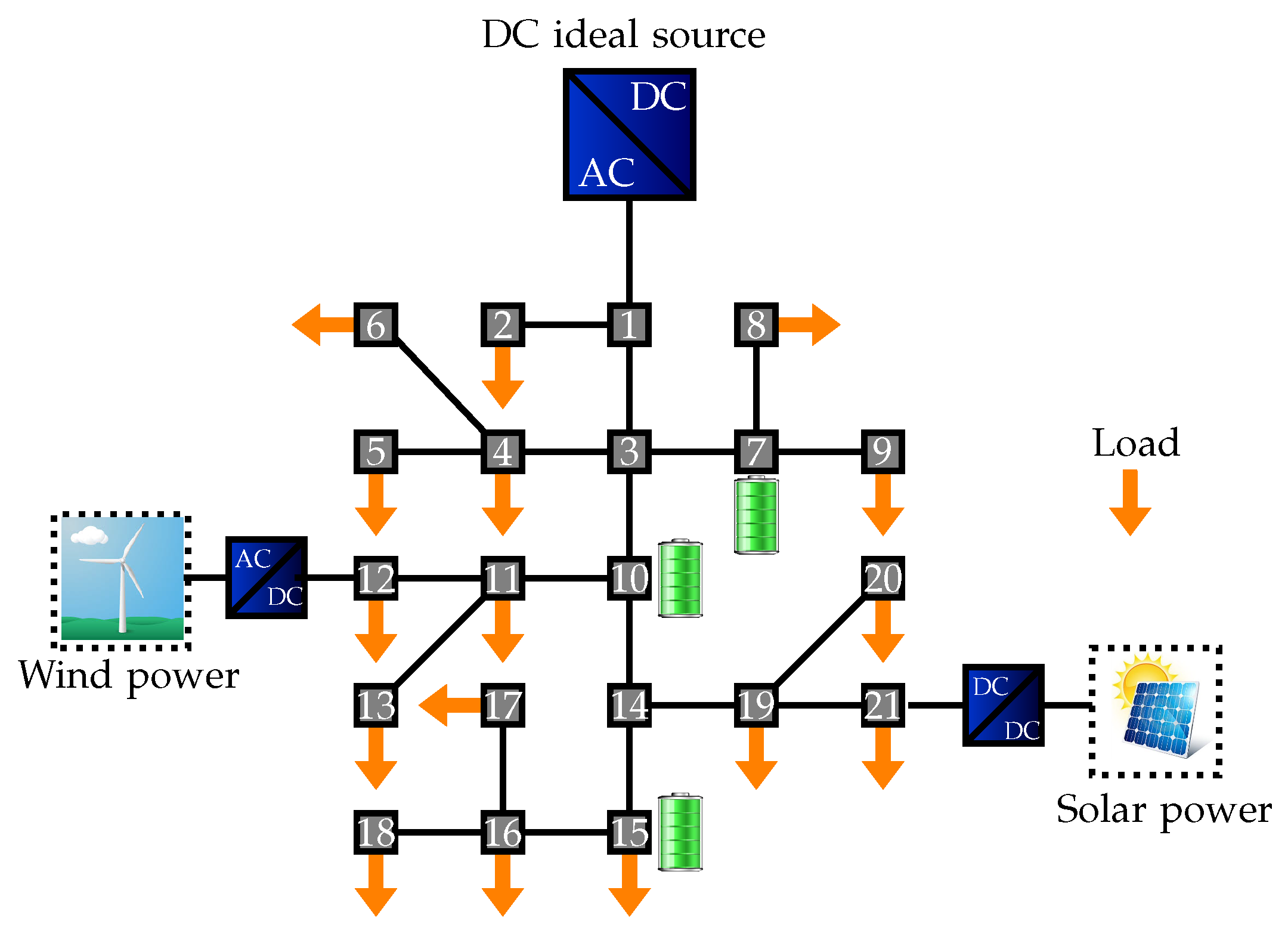
After reviewing the state-of-the-art, there is no evidence about using SOCP models for optimal operation of batteries in DC networks, which is a gap that this research tries to fulfill. In addition, the main contribution is the possibility of ensuring the convexity of the economic dispatch problem by relaxing the rank constraint, which guarantees the existence of uniqueness and optimal global solution. This implies that any gradient descendent or interior point method can solve the equivalent SOCP model accurately. To verify the effectiveness of our proposed approach, we employ a 21-node test feeder and compare the results reached by the SOCP with a semidefinite programming model reported in [
8] and an exact non-linear model solved through the general algebraic modeling system presented in [
6].
The remainder of this paper is organized as follows:
Section 2 describes the mathematical model for the economic dispatch in DCMG considering renewable generators and BESSs.
Section 3 provides the SOCP approach and its application for the economic dispatch model.
Section 4 formulates the energy short-term forecasting model to predict the power output of wind and solar power systems.
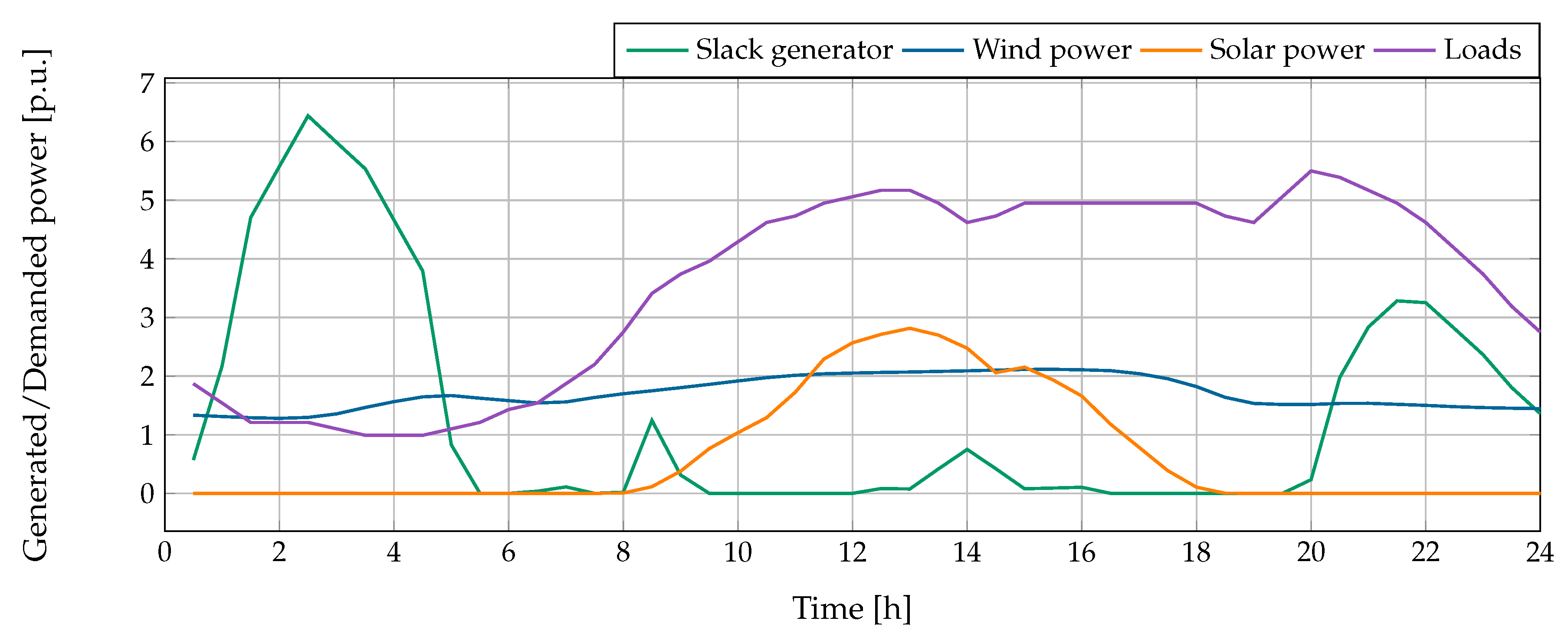
Section 5 presents the test system, simulation scenarios, and their results using different mathematical models for the economic dispatch. Lastly, concluding remarks are shown in
Section 6.
2. Economic Dispatch Model
The mathematical non-convex model for the optimal daily operation of renewable energy and BESSs is composed of an objective function and non-linear constraints [
6]. The objective function is related to the cost operation of DCMGs, while the non-linear constraints are related to technical and operational aspects in DCMGs [
8]. The control variables for economic dispatch are power delivered/absorbed for devices of system, such as conventional generators, renewable generators, and BESSs.
Objective function
where
z denotes the function to be minimized, which corresponds to the daily operative costs of conventional generators,
is the purchase costs of energy at node
i in period
t,
is the power generation delivered at node
i during period
t, and
is the length of the time period under analysis, this study is 30 min (in per unit 0.5).
and
are the sets of periods of time considered and the number of nodes considered in the DCMG, respectively.
Set of constraints
where
p denotes the power delivered/absorbed for devices, the superscripts
,
b, and
d denote renewable energy generations, BESSs, and demand, respectively.
i and
t represent node and the time period under analysis.
is the state of charge of each BESS.
v denotes the voltage profile, and
is the conductance value, which represents the physical connections of the nodes in DCMG.
and
are the initial and final desired states of charge of the BESSs. The superscripts
and
denote the minimum and maximum admissible bounds in DCMG related to its technical and operational aspects, and
is the charge coefficient of the BESSs.
Equation (
1) shows the objective function in this study, whose goal is to minimize the total energy purchasing costs in DCMG. Equation (
2) represents load-generation balance at each node of the DCMG, also well-known power balance equation. Equation (3) provides the state-of-charge of BESSs. Equations (4) and (5) define the initial and final state-of-charge desired for the BESS, respectively. Equations (6)–(8) limits minimum/maximum power delivered by the conventional generator, renewable energy and BESSs, respectively. Equation (9) defines the minimum/maximum limits of voltages in DCMG, and Equation (10) defines the minimum/maximum bounds of the state-of-charge of BESSs.
It is important to mention that this model is non-linear non-convex due to the power balance equation (see Equation (
2)) since it is a non-affine equality constraint [
9]. This constraint generates a hyperbolic relation between power and voltage at all nodes of DCMG [
6]. Hence, it is not possible to guarantee global optimum, applying conventional optimization techniques [
8].
Note that there are multiple models that can used for optimal operation of batteries in dc networks; nevertheless, here we present an economic dispatch formulation as well as a convex reformulation, where the main idea is minimizing the total energy purchase costs in conventional generators, subject to classical power flow equations and device capacities [
10]. In specialized literature, the main difference between economic dispatch models and optimal power flow ones is only the objective function value since in the first case are used economical (monetary) functions, while the second case considers energy loss as the objective function [
22]. For a better understanding of both mathematical models regarding main control variables, sets, parameters and etc., see the Abbreviations presented at the end of this paper.
6. Conclusions
A convex mathematical model based on second-order cone programming for the economic dispatch of a DCMG with renewable generators and BESS was proposed. The SOCP formulation permitted converting the non-convex model of economic dispatch into a convex approach that guarantees the global optimum and has an easy implementation in specialized software, such as the CVX. The proposed convex model considered the variation of the energy purchase price for the efficient operation of DCMG in each period, which makes it in a suitable formulation to implement in real-time obtaining better results than the exact model executed in GAMS. The advantage of the SOCP model in comparison to the SDP model is that it guarantees exact optimal solutions for the economic dispatch problem in DCMG. Additionally, the SOCP model can be exploited in problems such as planning and operation of DCMG with a precision-level, reducing local optimum and computational efforts.
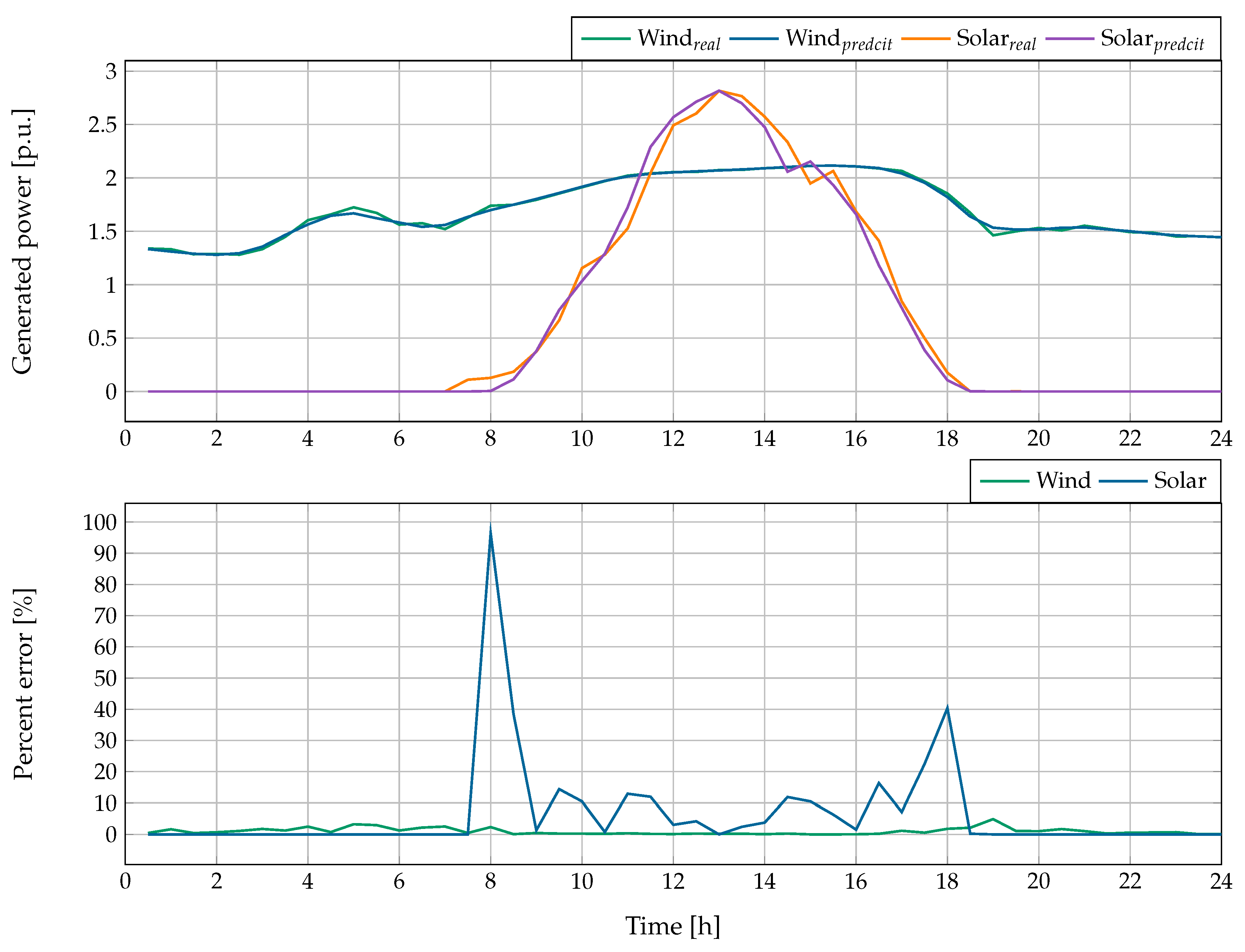
The RHC plus the ANN showed to be a great tool to predict the primary resources of renewable energies and does not affect the dispatch of the BESSs, only increasing the final purchase costs in 1.25% in the worst scenarios.
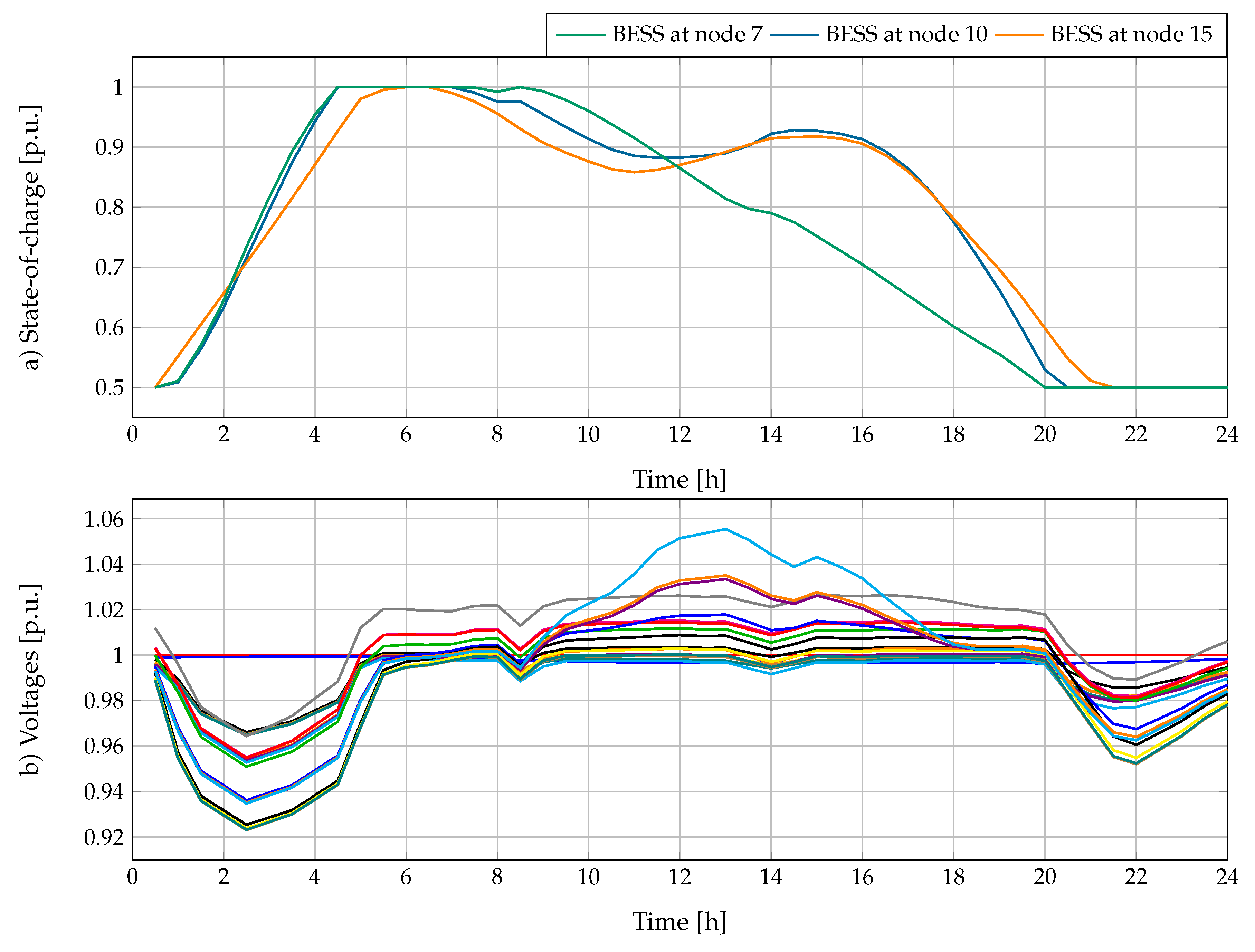
It was also demonstrated that the implementation of BESSs in DCMG enhance its operation, reducing its operating costs. Therefore, it is important to propose efficient operation strategies that maximize the useful life of BESSs without making it work inadequately or have a fully discharged state.
Future work may include the development of operational strategies for BESSs in order to minimize the operating costs in DCMG and increase their useful life. Since its strategy also affect the performance of the DCMG, as observed in this study.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}