
Machine Learning-Based Prediction of the Seismic Bearing Capacity of a Shallow Strip Footing over a Void in Heterogeneous Soils

 , , and
, , and
Abstract
:1. Introduction
- Soil cohesion
- Soil internal friction angle
- Heterogeneity
- Distance of the void from the central line of the footing
- Depth of the void
- Shape and size of the void
- Horizontal earthquake acceleration.
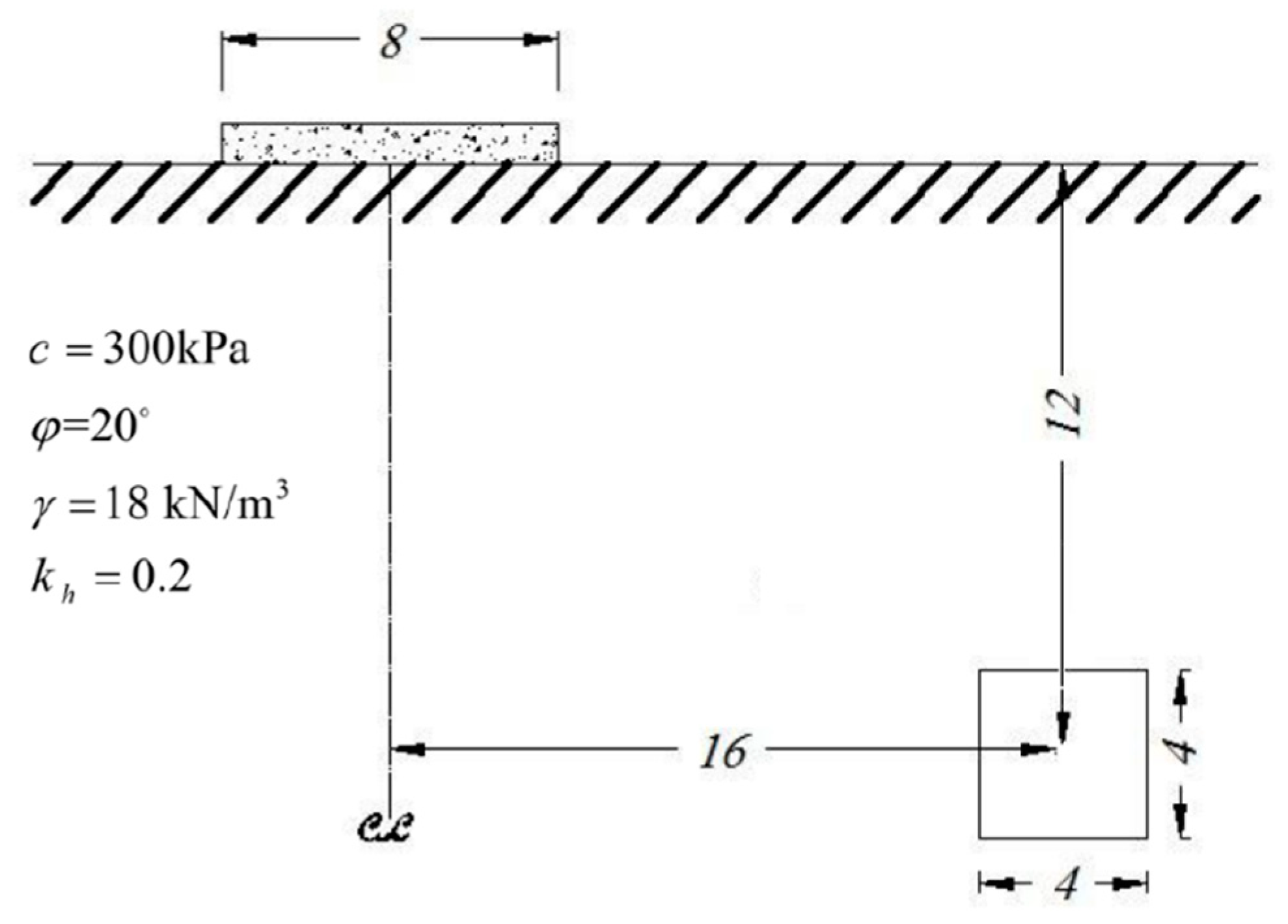
2. Problem Definition
- -
- Horizontal seismic acceleration coefficient which is equal to the ratio between the horizontal earthquake-induced ground acceleration and the gravity acceleration.
- -
- Ratio between the void width and the foundation width .
- -
- Ratio between the void height and the foundation width .
- -
- Undrained shear strength of the soil at the ground level, being the cohesion of the soil, and the soil specific gravity.
- -
- Rate of change of the cohesion with the depth, according to the law:
- -
- Internal friction angle of the soil in the drained state.
- -
- Depth of the void, being the burial depth of the upper side (roof) of the void.
- -
- Eccentricity of the void, being the horizontal distance of the center of the void from the centerline of the foundation.
3. Parametric Study
3.1. Soil Parameters
3.2. Void Parameters
4. Machine Learning Techniques
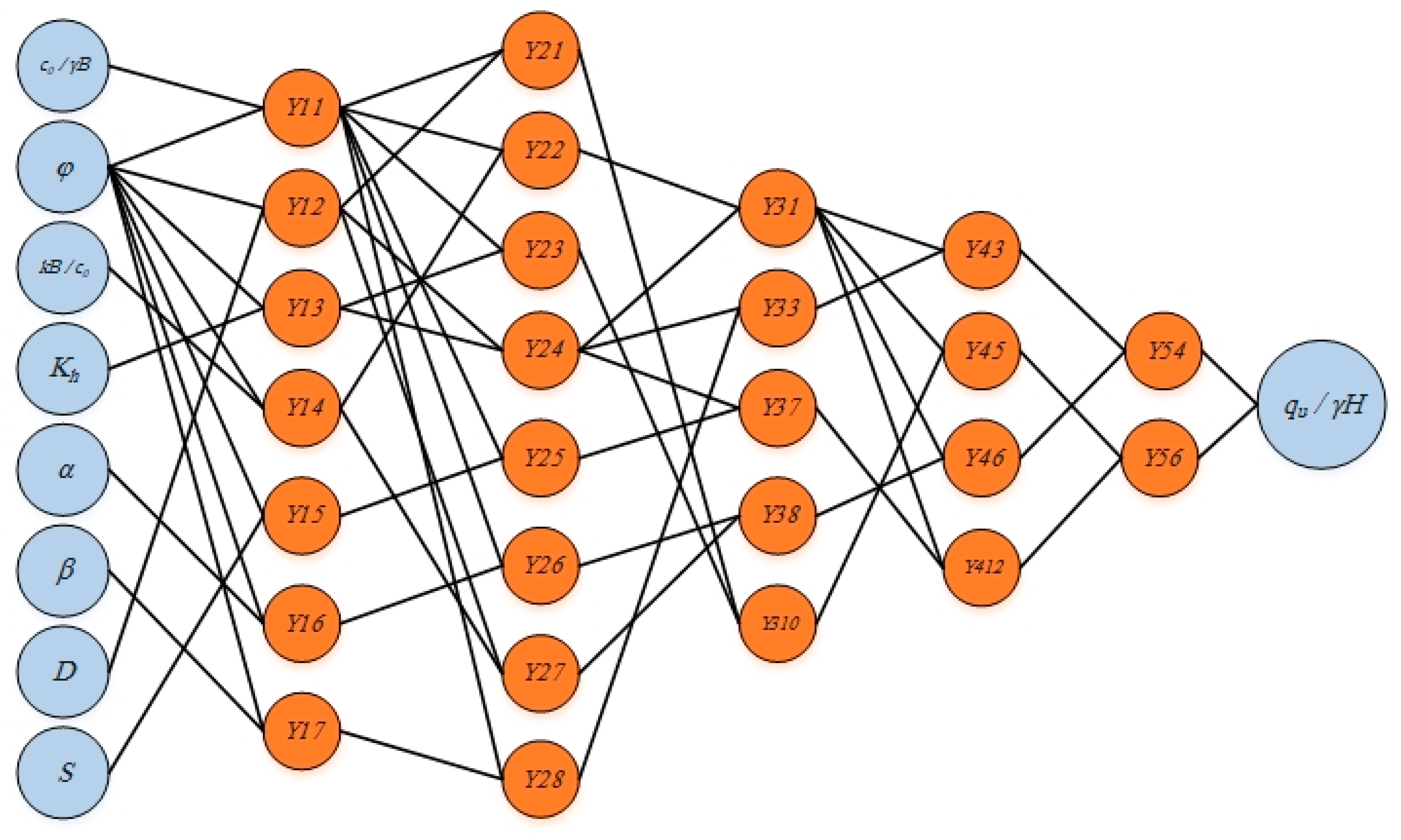
4.1. Multilayer Perceptron (MLP)
4.2. Group Method of Data Handling (GMDH)
4.3. Combined Adaptive-Network-Based Fuzzy Inference System and Particle Swarm Optimization (ANFIS-PSO)
5. Results and Discussion
6. A Case Study
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. MLP

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Neuron | = 1 | = 2 | α j = 5 | β j = 6 | = 7 | = 8 | Bias | ||
|---|---|---|---|---|---|---|---|---|---|
| N1j | 0.230 | 1.079 | 0.077 | −0.254 | 0.007 | −0.051 | −0.572 | −0.385 | −1.820 |
| N2j | 0.093 | 0.367 | −0.010 | −0.089 | 0.018 | −0.142 | −0.152 | 0.110 | −1.078 |
| N3j | 0.149 | 1.059 | 0.245 | −0.114 | −0.036 | −0.012 | 0.292 | 0.114 | −1.978 |
| N4j | 0.258 | 0.959 | 0.116 | −0.196 | −0.045 | −0.037 | −0.158 | −0.529 | −2.371 |
| N5j | 0.014 | −0.480 | 0.094 | 0.221 | −0.408 | −0.014 | 1.267 | −0.300 | 0.381 |
| N6j | 0.033 | −0.410 | 0.100 | 0.203 | −0.401 | −0.011 | 1.241 | −0.331 | 0.445 |
| N7j | 0.195 | 1.032 | 0.110 | −0.234 | 0.058 | −0.043 | −0.677 | −0.378 | −2.086 |
| N8j | 0.143 | 1.295 | −0.187 | −0.315 | 0.208 | 0.072 | −0.997 | −0.231 | −2.155 |
| N9j | 0.207 | 0.987 | 0.133 | −0.206 | 0.051 | −0.021 | −0.473 | −0.555 | −2.479 |
| N10j | −0.161 | −1.152 | −0.074 | 0.265 | −0.139 | 0.018 | 1.014 | 0.297 | 2.249 |
| N11j | −0.555 | −2.524 | 0.539 | 0.581 | −0.013 | 0.037 | −0.155 | −0.097 | 4.469 |
| N12j | −0.093 | −0.433 | 0.022 | 0.105 | −0.014 | 0.204 | 0.168 | −0.154 | 0.321 |
| N13j | −0.055 | 0.336 | −0.108 | −0.185 | 0.396 | 0.009 | −1.222 | 0.367 | −0.517 |
| N14j | 0.191 | 1.267 | −0.068 | −0.302 | 0.162 | 0.031 | −0.816 | −0.176 | −1.871 |
| N15j | −0.107 | −1.291 | 0.193 | 0.316 | −0.217 | −0.071 | 1.190 | 0.317 | 2.421 |
| N16j | −0.271 | 0.934 | 0.191 | −0.179 | 0.001 | 0.002 | 0.129 | 0.082 | −3.216 |
| N17j | 0.356 | 3.307 | 0.188 | −0.448 | −0.049 | −0.013 | 0.249 | 0.086 | −4.666 |
| N18j | 0.228 | 0.869 | 0.233 | 0.107 | −0.072 | −0.026 | 0.234 | 0.087 | −2.364 |
| N19j | −0.196 | −1.090 | −0.149 | 0.214 | −0.103 | −0.015 | 0.560 | 0.818 | 2.999 |
| N20j | −0.214 | −0.843 | 0.001 | 0.210 | −0.054 | 0.272 | 0.391 | −0.188 | 1.409 |
| Neuron | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | F9 | F10 |
| Weight | −1.820 | −1.078 | −1.978 | −2.371 | 0.381 | 0.445 | −2.086 | −2.155 | −2.479 | 2.249 |
| Neuron | F11 | F12 | F13 | F14 | F15 | F16 | F17 | F18 | F19 | F20 |
| Weight | 4.469 | 0.321 | −0.517 | −1.871 | 2.421 | −3.216 | −4.666 | −2.364 | 2.999 | 1.409 |
| Bias | −5.785 | |||||||||
Appendix A.2. MLP

| Layer 6: | ||
| Layer 5: | ||
| Layer 4: | ||
| Layer 3: | ||
| Layer 2: | ||
| Layer 1: | ||
Appendix A.3. MLP
| %% Calculation of %% seismic bearing capacity of shallow strip footing above void %% using developed ANFIS-PSO Model clc; clear; close all; %% Load data Data = xlsread(‘TOTAL.xls’); Inputs = Data(:,1:8); Targets = Data(:,9); pTrain = 0.7; nSample=size(Inputs,1); S=randperm(nSample); Inputs=Inputs(S,:); Targets=Targets(S,:); nTrain=round(pTrain*nSample); TrainInputs=Inputs(1:nTrain,:); TrainTargets=Targets(1:nTrain,:); % Test Data TestInputs=Inputs(nTrain+1:end,:); TestTargets=Targets(nTrain+1:end,:); data.TrainInputs=TrainInputs; data.TrainTargets=TrainTargets; data.TestInputs=TestInputs; data.TestTargets=TestTargets; x=data.TrainInputs; t=data.TrainTargets; %% FIS generation fcm_U=2; fcm_MaxIter=100; fcm_MinImp=1e−5; fcm_Display=false; fcm_options=[fcm_U fcm_MaxIter fcm_MinImp fcm_Display]; fis=genfis3(x,t,’sugeno’,’auto’,fcm_options); %% Replace the optimized values with initial parameters % Inputs fis.input(1).mf(1) = [1.301115465399861,−1.575969263692241e+02]; fis.input(1).mf(2) = [1.39537096758637,5.80288003575955]; fis.input(1).mf(3) = [1.32753841581507,6.12312993329938]; fis.input(1).mf(4) = [−2.99744469222945,11.8187873538266]; fis.input(1).mf(5) = [−1.58913304831883,−4.04045087767979]; fis.input(1).mf(6) = [0.551810935266596,16.4385819570161]; fis.input(1).mf(7) = [1.20938811411893,6.45953912312216]; fis.input(1).mf(8) = [0.990780951100060,47.2549380869500]; fis.input(1).mf(9) = [−11.3448929022742,135.727256038108]; fis.input(1).mf(10) = [46.3852091222287,−296.477381534473]; fis.input(2).mf(1) = [4.49826172860923,44.6291751793605]; fis.input(2).mf(2) = [623.657809702359,6.01871660300149]; fis.input(2).mf(3) = [14.0659723983362,64.5984872435018]; fis.input(2).mf(4) = [−0.411359437154132,26.1228287948813]; fis.input(2).mf(5) = [5.46202597943682,58.6521630155343]; fis.input(2).mf(6) = [6.72956934682301,20.9374267682803]; fis.input(2).mf(7) = [8.17995068719498,40.4218811492891]; fis.input(2).mf(8) = [−55.5744132684524,3.74138684127930]; fis.input(2).mf(9) = [2.97949075988714,195.909200691605]; fis.input(2).mf(10) = [4.94406444449706,28.2938582432552]; fis.input(3).mf(1) = [0.558439218333400,−42.9294569439493]; fis.input(3).mf(2) = [0.341861142513016,0.208509259146192]; fis.input(3).mf(3) = [0.320952145698052,0.338487513869374]; fis.input(3).mf(4) = [0.0112933797675468,0.349011577830193]; fis.input(3).mf(5) = [0.628987742366289,−5.65261717022853]; fis.input(3).mf(6) = [0.143022875355853,0.209962234117897]; fis.input(3).mf(7) = [−0.303110758407218,0.422100596688156]; fis.input(3).mf(8) = [−0.129297482768199,1.96588563673664]; fis.input(3).mf(9) = [−1.10976229689612,0.782356308029184]; fis.input(3).mf(10) = [0.0181824886070332,0.502666728608248]; fis.input(4).mf(1) = [−1.53760582193352,0.235733763020089]; fis.input(4).mf(2) = [0.146557455535409,0.173931841963623]; fis.input(4).mf(3) = [0.136906090541617,0.115816913268631]; fis.input(4).mf(4) = [0.215846576897712,−0.0584054505788597]; fis.input(4).mf(5) = [0.0827759706119010,0.0657280604384861]; fis.input(4).mf(6) = [−0.0299950773443980,0.122327023260196]; fis.input(4).mf(7) = [0.139317774033470,0.0825086338807186]; fis.input(4).mf(8) = [0.0604849492846655,−0.0558121737259787]; fis.input(4).mf(9) = [0.0551675348575190,0.103977158993384]; fis.input(4).mf(10) = [−0.607529953839584,0.206743342387983]; fis.input(5).mf(1) = [0.544252390851114,2.84206107210769]; fis.input(5).mf(2) = [0.539900899679770,1.37341522007372]; fis.input(5).mf(3) = [0.544858465157576,1.32576203695598]; fis.input(5).mf(4) = [−1.31482328492258,2.04765021296940]; fis.input(5).mf(5) = [0.0906983807412905,28.0591517918102]; fis.input(5).mf(6) = [−0.357714386593391,−1.09777215395796]; fis.input(5).mf(7) = [0.205412132209019,2.32513404117998]; fis.input(5).mf(8) = [−4.11327559124782,−0.0212474892770918]; fis.input(5).mf(9) = [0.564267940248977,0.987973084514128]; fis.input(5).mf(10) = [0.0928976461385034,1.38664699780595]; fis.input(6).mf(1) = [0.0500350307011345,−1.06152607888853]; fis.input(6).mf(2) = [0.951352663417726,1.64237965046264]; fis.input(6).mf(3) = [0.979807352029935,1.58023050753098]; fis.input(6).mf(4) = [0.0853981948480649,96.0738763302328]; fis.input(6).mf(5) = [−1.24461830541894,1.40439229013306]; fis.input(6).mf(6) = [0.403251253695700,1.95086031807324]; fis.input(6).mf(7) = [0.194921192272058,1.44412886683300]; fis.input(6).mf(8) = [0.677246034929307,123.394060398626]; fis.input(6).mf(9) = [−0.616975804539023,2.98389270845537]; fis.input(6).mf(10) = [0.366506998551417,1.99073908040321]; fis.input(7).mf(1) = [0.314231197497665,34.9980654109376]; fis.input(7).mf(2) = [1.77539773105983,4.49579934294100]; fis.input(7).mf(3) = [1.40908323978350,4.93706861264041]; fis.input(7).mf(4) = [1.68434865799440,4.68603507041055]; fis.input(7).mf(5) = [1.80058538472203,10.8667911486649]; fis.input(7).mf(6) = [67.2087789874656,3.76348476588110]; fis.input(7).mf(7) = [0.275443157812118,1.20004737701855]; fis.input(7).mf(8) = [0.718805486311480,5.74146616892061]; fis.input(7).mf(9) = [0.937167950877247,0.0849406270061630]; fis.input(7).mf(10) = [1.86384116217275,−26.8792947685849]; fis.input(8).mf(1) = [−0.218183697606437,44.2852933746595]; fis.input(8).mf(2) = [0.955224460890379,2.25309641262094]; fis.input(8).mf(3) = [1.00274079745095,2.53908934858818]; fis.input(8).mf(4) = [−0.358709913323225,−31.9746514351069]; fis.input(8).mf(5) = [8.92996268398765,−66.2789598808554]; fis.input(8).mf(6) = [0.618138463950752,−1.04925077332817]; fis.input(8).mf(7) = [0.384555720599418,4.02052295274575]; fis.input(8).mf(8) = [0.448833975188620,−7.93475175376517]; fis.input(8).mf(9) = [0.866607240624434,−26.9102718016943]; fis.input(8).mf(10) = [0.600453493233465,7.25732995933014]; % Outputs fis.output.mf(1) = {[−689.425261311904,1.21614123144558,−976.352534304400,… −332.103923736413,−15.7121991699140,−364.006379550992,… −0.0357321372274733,16.6428835777621,−328.312666346567]}; fis.output.mf(2) = {[7.86770210626133,1.58985333879889,9.07738246970494,… −51.4847396123647,−7.03759620819383,−2.30718320711741,… 4.45188186517472,4.73434989957803,−28.0446674433245]}; fis.output.mf(3) = {[125.670426721745,9.16385972761935,221.802351055617,… −1845.62870281843,−19.8862510145831,−4.70222125515065,… −155.853608228798,−388.257483520611,2780.46827856428]}; fis.output.mf(4) = {[18.5996813644829,9.32278900497095,61.7266138558455,… −746.527799900759,−12.1353129776979,−9.25261111500329,… −1.39560537067644,5.91142304439135,−150.961557921629]}; fis.output.mf(5) = {[77.9206683932003,−52.5046350869773,70.5124536890843,… −4735.85205337380,−146.061498996749,−32.6540477132762,… 104.732141939454,8.69584715274910,26.9543121890490]}; fis.output.mf(6) = {[17.2983902564856,8.05050418144457,−5504.69849351306,… −9182.54579548493,4.77973537378691,−5.46438007869284,… 17.9724682816546,23.0101997969770,−119.816328163368]}; fis.output.mf(7) = {[−0.615011617394624,34.0125379071472,… 75.6354083240845,… −215.021325684436,−6.31028964439018,−157.891977261402,… −12.7016606211815,10.2369296878174,−244.298158216993]}; fis.output.mf(8) = {[−17.1021382399560,16.5331862533439,81.9498850613868,… −240.362251983159,270.555157998955,388.828294303365,… 45.2962063921662,−8.79334878589904,−6825.43850044074]}; fis.output.mf(9) = {[−95.3641004107813,99.2843443908631,65.2651622769621,… 447.557253984748,−22.9264770832572,−3.96275068928168,… 33.4630672599298,12.7700856469466,534.968954893242]}; fis.output.mf(10) = {[15.5399001393948,23.0415204815094,63.4544966787328,… −131.187148226091,38.2148204298256,10.6257173979356,… 27.1830599292225,20.5818567689538,−169.080279356974]}; %% Bearing capacity calculation Outputs = evalfis(Inputs,fis) |
References
- Fam, M.A.; Cascante, G.; Dusseault, M.B. Large and small strain properties of sands subjected to local void increase. J. Geotech. Geoenviron. Eng. 2002, 128, 1018–1025. [Google Scholar] [CrossRef]
- Tharp, T.M. Mechanics of upward propagation of cover-collapse sinkholes. Eng. Geol. 1999, 52, 23–33. [Google Scholar] [CrossRef]
- Al-Tabbaa, A.; Russell, L.; O’Reilly, M. Model tests of footings above shallow cavities. Ground Eng. 1989, 22, 39–41. [Google Scholar]
- Badie, A.; Wang, M.C. Stability of spread footing above void in clay. J. Geotech. Eng. 1984, 110, 1591–1605. [Google Scholar] [CrossRef]
- Baus, R.L.; Wang, M.C. Bearing capacity of strip footing above void. J. Geotech. Eng. 1983, 109, 1–4. [Google Scholar] [CrossRef]
- Wang, M.C.; Badie, A. Effect of underground void on foundation stability. J. Geotech. Eng. 1985, 111, 1008–1019. [Google Scholar] [CrossRef]
- Wang, M.C.; Hsieh, C.W. Collapse load of strip footing above circular void. J. Geotech. Eng. 1987, 113, 511–515. [Google Scholar] [CrossRef]
- Es-haghi, M.S.; Abbaspour, M.; Rabczuk, T. Factors and Failure Patterns Analysis for Undrained Seismic Bearing Capacity of Strip Footing Above Void. Int. J. Geomech. 2021, 21, 04021188. [Google Scholar] [CrossRef]
- Kiyosumi, M.; Kusakabe, O.; Ohuchi, M.; Le Peng, F. Yielding pressure of spread footing above multiple voids. J. Geotech. Geoenviron. Eng. 2007, 133, 1522–1531. [Google Scholar] [CrossRef] [Green Version]
- Kiyosumi, M.; Kusakabe, O.; Ohuchi, M. Model tests and analyses of bearing capacity of strip footing on stiff ground with voids. J. Geotech. Geoenviron. Eng. 2011, 137, 363–375. [Google Scholar] [CrossRef]
- Yamamoto, K.; Lyamin, A.V.; Wilson, D.W.; Sloan, S.W.; Abbo, A.J. Stability of dual circular tunnels in cohesive-frictional soil subjected to surcharge loading. Comput. Geotech. 2013, 50, 41–54. [Google Scholar] [CrossRef]
- Lee, J.K.; Jeong, S.; Ko, J. Undrained stability of surface strip footings above voids. Comput. Geotech. 2014, 62, 128–135. [Google Scholar] [CrossRef]
- Lee, J.K.; Jeong, S.; Ko, J. Effect of load inclination on the undrained bearing capacity of surface spread footings above voids. Comput. Geotech. 2015, 66, 245–252. [Google Scholar] [CrossRef]
- Lee, J.K.; Jeong, S.; Lee, S. Undrained bearing capacity factors for ring footings in heterogeneous soil. Comput. Geotech. 2016, 75, 103–111. [Google Scholar] [CrossRef]
- Lavasan, A.A.; Talsaz, A.; Ghazavi, M.; Schanz, T. Behavior of shallow strip footing on twin voids. Geotech. Geol. Eng. 2016, 34, 1791–1805. [Google Scholar] [CrossRef]
- Chakraborty, D.; Sawant, A.S. Seismic bearing capacity of strip footing above an unsupported circular tunnel in undrained clay. Int. J. Geotech. Eng. 2017, 11, 97–105. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhao, M.; Zhao, H.; Zhang, R. Finite element limit analysis of the bearing capacity of strip footing on a rock mass with voids. Int. J. Geomech. 2018, 18, 04018108. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhao, M.; Zhao, H. Undrained stability of strip footing above voids in two-layered clays by finite element limit analysis. Comput. Geotech. 2018, 97, 124–133. [Google Scholar] [CrossRef]
- Zhou, H.; Zheng, G.; He, X.; Xu, X.; Zhang, T.; Yang, X. Bearing capacity of strip footings on c–φ soils with square voids. Acta Geotech. 2018, 13, 747–755. [Google Scholar] [CrossRef]
- Lee, J.K.; Kim, J. Stability charts for sustainable infrastructure: Collapse loads of footings on sandy soil with voids. Sustainability 2019, 11, 3966. [Google Scholar] [CrossRef] [Green Version]
- Wu, G.; Zhao, M.; Zhao, H.; Xiao, Y. Effect of eccentric load on the undrained bearing capacity of strip footings above voids. Int. J. Geomech. 2020, 20, 04020078. [Google Scholar] [CrossRef]
- Zhang, R.; Feng, M.; Xiao, Y.; Liang, G. Seismic Bearing Capacity for Strip Footings on Undrained Clay with Voids. J. Earthq. Eng. 2020, 1–4. [Google Scholar] [CrossRef]
- Das, S.K.; Samui, P.; Sabat, A.K. Application of artificial intelligence to maximum dry density and unconfined compressive strength of cement stabilized soil. Geotech. Geol. Eng. 2011, 29, 329–342. [Google Scholar] [CrossRef]
- Erzin, Y.; Gumaste, S.D.; Gupta, A.K.; Singh, D.N. Artificial neural network (ANN) models for determining hydraulic conductivity of compacted fine-grained soils. Can. Geotech. J. 2009, 46, 955–968. [Google Scholar] [CrossRef]
- Es-Haghi, M.S.; Shishegaran, A.; Rabczuk, T. Evaluation of a novel Asymmetric Genetic Algorithm to optimize the structural design of 3D regular and irregular steel frames. Front. Struct. Civ. Eng. 2020, 14, 1110–1130. [Google Scholar] [CrossRef]
- Mishra, A.K.; Kumar, B.; Dutta, J. Prediction of Hydraulic Conductivity of Soil Bentonite Mixture Using Hybrid-ANN Approach. J. Environ. Inform. 2016, 27, 98–105. [Google Scholar] [CrossRef]
- Safari, M.J.; Ebtehaj, I.; Bonakdari, H.; Es-haghi, M.S. Sediment transport modeling in rigid boundary open channels using generalize structure of group method of data handling. J. Hydrol. 2019, 577, 123951. [Google Scholar] [CrossRef]
- Shishegaran, A.; Varaee, H.; Rabczuk, T.; Shishegaran, G. High correlated variables creator machine: Prediction of the compressive strength of concrete. Comput. Struct. 2021, 247, 106479. [Google Scholar] [CrossRef]
- Martinez, R.F.; Lorza, R.L.; Delgado, A.A.; Pullaguari, N.O. Optimizing presetting attributes by softcomputing techniques to improve tapered roller bearings working conditions. Adv. Eng. Softw. 2018, 123, 13–24. [Google Scholar] [CrossRef]
- Lostado Lorza, R.; Escribano García, R.; Fernandez Martinez, R.; Martínez Calvo, M.Á. Using genetic algorithms with multi-objective optimization to adjust finite element models of welded joints. Metals 2018, 8, 230. [Google Scholar] [CrossRef] [Green Version]
- Lostado-Lorza, R.; Escribano-Garcia, R.; Fernandez-Martinez, R.; Illera-Cueva, M.; Mac Donald, B.J. Using the finite element method and data mining techniques as an alternative method to determine the maximum load capacity in tapered roller bearings. J. Appl. Log. 2017, 24, 4–14. [Google Scholar] [CrossRef]
- Lostado Lorza, R.; Corral Bobadilla, M.; Martínez Calvo, M.Á.; Villanueva Roldan, P.M. Residual stresses with time-independent cyclic plasticity in finite element analysis of welded joints. Metals 2017, 7, 136. [Google Scholar] [CrossRef] [Green Version]
- Das, S.K.; Basudhar, P.K. Undrained lateral load capacity of piles in clay using artificial neural network. Comput. Geotech. 2006, 33, 454–459. [Google Scholar] [CrossRef]
- Lee, I.M.; Lee, J.H. Prediction of pile bearing capacity using artificial neural networks. Comput. Geotech. 1996, 18, 189–200. [Google Scholar] [CrossRef]
- Momeni, E.; Nazir, R.; Armaghani, D.J.; Maizir, H. Prediction of pile bearing capacity using a hybrid genetic algorithm-based ANN. Measurement 2014, 57, 122–131. [Google Scholar] [CrossRef]
- Acharyya, R.; Dey, A. Assessment of failure mechanism of a strip footing on horizontal ground considering flow rules. Innov. Infrastruct. Solut. 2018, 3, 49. [Google Scholar] [CrossRef]
- Behera, R.N.; Patra, C.R.; Sivakugan, N.; Das, B.M. Prediction of ultimate bearing capacity of eccentrically inclined loaded strip footing by ANN: Part II. Int. J. Geotech. Eng. 2013, 7, 165–172. [Google Scholar] [CrossRef]
- Giasi, C.I.; Cherubini, C.; Paccapelo, F. Evaluation of compression index of remoulded clays by means of Atterberg limits. Bull. Eng. Geol. Environ. 2003, 62, 333–340. [Google Scholar] [CrossRef]
- Kuo, Y.L.; Jaksa, M.B.; Lyamin, A.V.; Kaggwa, W.S. ANN-based model for predicting the bearing capacity of strip footing on multi-layered cohesive soil. Comput. Geotech. 2009, 36, 503–516. [Google Scholar] [CrossRef]
- Shahin, M.A.; Maier, H.R.; Jaksa, M.B. Predicting settlement of shallow foundations using neural networks. J. Geotech. Geoenviron. Eng. 2002, 128, 785–793. [Google Scholar] [CrossRef]
- Osman, A.S.; Mair, R.J.; Bolton, M.D. On the kinematics of 2D tunnel collapse in undrained clay. Geotechnique 2006, 56, 585–595. [Google Scholar] [CrossRef] [Green Version]
- Sloan, S.W.; Assadi, A. Undrained stability of a square tunnel in a soil whose strength increases linearly with depth. Comput. Geotech. 1991, 12, 321–346. [Google Scholar] [CrossRef]
- Krabbenhoft, K.; Lyamin, A.; Krabbenhoft, J. Optum Computational Engineering (OptumG2). Computer Software. 2015. Available online: https://www.optumce.com (accessed on 12 August 2021).
- Wilson, D.W.; Abbo, A.J.; Sloan, S.W.; Lyamin, A.V. Undrained stability of dual square tunnels. Acta Geotech. 2015, 10, 665–682. [Google Scholar] [CrossRef]
- Beygi, M.; Keshavarz, A.; Abbaspour, M.; Vali, R.; Saberian, M.; Li, J. Finite element limit analysis of the seismic bearing capacity of strip footing adjacent to excavation in c-φ soil. Geomech. Geoengin. 2020, 1–4. [Google Scholar] [CrossRef]
- Beygi, M.; Vali, R.; Keshavarz, A. Pseudo-static bearing capacity of strip footing with vertical skirts resting on cohesionless slopes by finite element limit analysis. Geomech. Geoengin. 2020, 1–4. [Google Scholar] [CrossRef]
- Shiau, J.S.; Lyamin, A.V.; Sloan, S.W. Bearing capacity of a sand layer on clay by finite element limit analysis. Can. Geotech. J. 2003, 40, 900–915. [Google Scholar] [CrossRef] [Green Version]
- Vali, R.; Beygi, M.; Saberian, M.; Li, J. Bearing capacity of ring foundation due to various loading positions by finite element limit analysis. Comput. Geotech. 2019, 110, 94–113. [Google Scholar] [CrossRef]
- Lyamin, A.V.; Sloan, S.W. Lower bound limit analysis using non-linear programming. Int. J. Numer. Methods Eng. 2002, 55, 573–611. [Google Scholar] [CrossRef]
- Lyamin, A.V. Three-Dimensional Lower Bound Limit Analysis Using Nonlinear Programming. Available online: https://nova.newcastle.edu.au/vital/access/manager/Repository/uon:37296 (accessed on 12 August 2021).
- Sloan, S.W. Lower bound limit analysis using finite elements and linear programming. Int. J. Numer. Anal. Methods Geomech. 1988, 12, 61–77. [Google Scholar] [CrossRef]
- Krabbenhoft, K.; Lyamin, A.V.; Sloan, S.W.; Wriggers, P. An interior-point algorithm for elastoplasticity. Int. J. Numer. Methods Eng. 2007, 69, 592–626. [Google Scholar] [CrossRef]
- Yu, H.S.; Sloan, S.W.; Kleeman, P.W. A quadratic element for upper bound limit analysis. Eng. Comput. 1994, 11, 195–212. [Google Scholar] [CrossRef] [Green Version]
- Vali, R.; Saberian, M.; Beygi, M.; Porhoseini, R.; Abbaspour, M. Numerical Analysis of Laterally Loaded Single-Pile Behavior Affected by Urban Metro Tunnel. Indian Geotech. J. 2020, 50, 410–425. [Google Scholar] [CrossRef]
- Keshavarz, A.; Beygi, M.; Vali, R. Undrained seismic bearing capacity of strip footing placed on homogeneous and heterogeneous soil slopes by finite element limit analysis. Comput. Geotech. 2019, 113, 103094. [Google Scholar] [CrossRef]
- Íñiguez-Macedo, S.; Lostado-Lorza, R.; Escribano-García, R.; Martínez-Calvo, M.Á. Finite element model updating combined with multi-response optimization for hyper-elastic materials characterization. Materials 2019, 12, 1019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
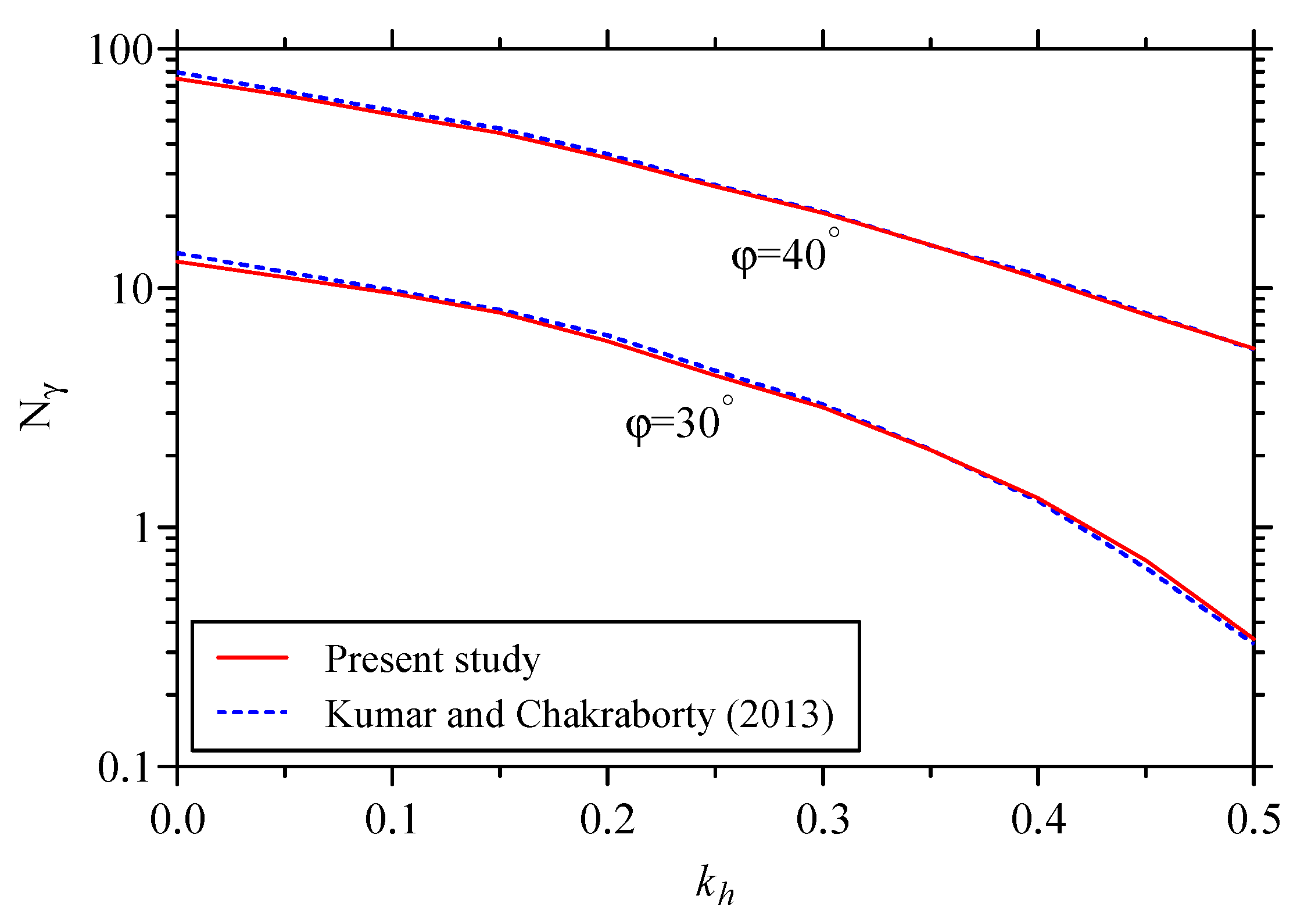
- Kumar, J. N γ for rough strip footing using the method of characteristics. Can. Geotech. J. 2003, 40, 669–674. [Google Scholar] [CrossRef]
- Booker, J.R. Application of Theories of Plasticity to Cohesive Frictional Soils. Available online: https://ses.library.usyd.edu.au/handle/2123/10044 (accessed on 12 August 2021).
- Chen, W.-F. Limit Analysis and Soil Plasticity; Elsevier Science: Amsterdam, The Netherlands, 1975. [Google Scholar]
- Hansen, J.B. A Revised and Extended Formula for Bearing Capacity. Dan. Geotech. Inst. Cph. Bull. 1970, 28, 5–11. [Google Scholar]
- Hjiaj, M.; Lyamin, A.V.; Sloan, S.W. Numerical limit analysis solutions for the bearing capacity factor Nγ. Int. J. Solids Struct. 2005, 42, 1681–1704. [Google Scholar] [CrossRef]
- Yang, F.; Zheng, X.C.; Zhao, L.H.; Tan, Y.G. Ultimate bearing capacity of a strip footing placed on sand with a rigid basement. Comput. Geotech. 2016, 77, 115–159. [Google Scholar] [CrossRef]
- Yun, G.; Bransby, M.F. The undrained vertical bearing capacity of skirted foundations. Soils Found. 2007, 47, 493–505. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.H.; Yang, F. Construction of improved rigid blocks failure mechanism for ultimate bearing capacity calculation based on slip-line field theory. J. Cent. South Univ. 2013, 20, 1047–1057. [Google Scholar] [CrossRef]
- Kumar, J.; Chakraborty, D. Seismic bearing capacity of foundations on cohesionless slopes. J. Geotech. Geoenviron. Eng. 2013, 139, 1986–1993. [Google Scholar] [CrossRef]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Pal, S.K.; Mitra, S. Multilayer perceptron, fuzzy sets, classifiaction. IEEE Trans. Neural Netw. 1992, 3, 683–697. [Google Scholar] [CrossRef] [PubMed]
- Ruck, D.W.; Rogers, S.K.; Kabrisky, M. Feature selection using a multilayer perceptron. J. Neural Netw. Comput. 1990, 2, 40–48. [Google Scholar]
- Noriega, L. Multilayer Perceptron Tutorial; School of Computing, Staffordshire University: Shropshire, UK, 2005. [Google Scholar]
- Gandomi, A.H.; Yang, X.S.; Talatahari, S.; Alavi, A.H. (Eds.) Metaheuristic Applications in Structures and Infrastructures; Newnes: Newton, MA, USA, 2013. [Google Scholar]
- Ivakhnenko, A.G. The group method of data handling in prediction problems. Sov. Autom. Control 1976, 9, 21–30. [Google Scholar]
- Farlow, S.J. The GMDH algorithm of Ivakhnenko. Am. Stat. 1981, 35, 210–215. [Google Scholar]
- Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Inan, G.Ö.; Göktepe, A.B.; Ramyar, K.A.; Sezer, A.L. Prediction of sulfate expansion of PC mortar using adaptive neuro-fuzzy methodology. Build. Environ. 2007, 42, 1264–1269. [Google Scholar] [CrossRef]
- Liu, M.; Ling, Y.Y. Using fuzzy neural network approach to estimate contractors’ markup. Build. Environ. 2003, 38, 1303–1308. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. Particle swarm optimization. IEEE Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- El-Zonkoly, A.M. Optimal tuning of power systems stabilizers and AVR gains using particle swarm optimization. Expert Syst. Appl. 2006, 31, 551–557. [Google Scholar] [CrossRef]
- El-Gallad, A.; El-Hawary, M.; Sallam, A.; Kalas, A. Enhancing the particle swarm optimizer via proper parameters selection. In Proceedings of the IEEE CCECE2002. Canadian Conference on Electrical and Computer Engineering, Winnipeg, MB, Canada, 12–15 May 2002; Volume 2, pp. 792–797. [Google Scholar]
- Shamshirband, S.; Mosavi, A.; Rabczuk, T. Particle swarm optimization model to predict scour depth around a bridge pier. Front. Struct. Civ. Eng. 2020, 14, 855–866. [Google Scholar] [CrossRef]
- Basser, H.; Karami, H.; Shamshirband, S.; Akib, S.; Amirmojahedi, M.; Ahmad, R.; Jahangirzadeh, A.; Javidnia, H. Hybrid ANFIS–PSO approach for predicting optimum parameters of a protective spur dike. Appl. Soft Comput. 2015, 30, 642–649. [Google Scholar] [CrossRef]
- Rezaee Jordehi, A.; Jasni, J. Parameter selection in particle swarm optimisation: A survey. J. Exp. Theor. Artif. Intell. 2013, 25, 527–542. [Google Scholar] [CrossRef]

















| Parameter | Yamamoto et al. [11] | J.K. Lee, Jeong and Ko [12] | Lavasan [15] | Xiao, Zhao and Zhao [18] | Zhou et al. [19] |
|---|---|---|---|---|---|
| Internal friction angle | √ | √ | |||
| Cohesion | √ | √ | √ | √ | |
| Depth of void | √ | √ | √ | √ | √ |
| Eccentricity of void | √ | √ | √ | √ | √ |
| Shape of void | √ | √ | √ | ||
| Size of void | √ | √ | √ |
| (°) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Present Study | Yang et al. | Booker | Hansen | Chen | Michalowski | Kumar | Hjiaj et al. | Zhao and Yang | ||
| LB | UB | |||||||||
| 20 | 1.41 | 3.11 | 2.98 | 3.01 | 2.95 | 5.200 | 4.47 | 3.43 | 2.89 | 2.92 |
| 25 | 3.55 | 7.07 | 6.75 | 6.95 | 6.76 | 11.40 | 9.77 | 7.18 | 6.59 | - |
| 30 | 10.9 | 16.2 | 15.29 | 16.06 | 15.07 | 25.00 | 21.39 | 15.57 | 14.90 | 14.96 |
| 35 | 25.4 | 37.8 | 35.73 | 37.13 | 33.92 | 57.00 | 48.68 | 35.16 | 34.80 | - |
| 40 | 63.8 | 96.1 | 88.54 | 85.81 | 79.54 | 114.0 | 118.83 | 85.73 | 85.86 | 86.76 |
| Present Study | Present Study | (Kiyosumi et al.) | (Kiyosumi et al.) | (Zhou et al.) | |||
|---|---|---|---|---|---|---|---|
| 1.50 | 1.71 | 1.98 | 2.02 | 1.68 | 1.95 | 1.68 | 1.92 |
| 2.00 | 2.55 | 2.95 | 3.11 | 2.50 | 2.90 | 2.50 | 2.92 |
| 2.50 | 3.39 | 3.98 | 3.90 | 3.34 | 3.88 | 3.34 | 3.88 |
| 3.00 | 4.14 | 4.80 | 4.62 | 4.17 | 4.85 | 4.18 | 4.83 |
| 3.50 | 4.66 | 5.08 | 5.10 | 5.00 | 5.82 | 5.00 | 5.19 |
| 4.00 | 5.11 | 5.15 | 5.16 | 5.84 | 5.18 | 5.21 | |
| 4.50 | 5.13 | 5.15 | 5.16 | 5.21 | 5.21 | ||
| 5.00 | 5.13 | 5.15 | 5.16 | 5.21 | 5.21 | ||
| Shape of Void | Effective Parameters | Total Number of Scenarios | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Rectangular | Selected Values | 2, 4, 6, 8 | 0, 0.5, 1 | 0.75, 1.5, 3, 4.5, 6 | 0, 1, 2, 3.5, 5 | 1 | 3 | 0, 10, 20, 30, 40 | 0, 0.1, 0.2, 0.3 | |
| 1 | 2 | |||||||||
| 1 | 1 | |||||||||
| 2 | 1 | |||||||||
| 3 | 1 | |||||||||
| Number of scenarios | 4 | 3 | 5 | 5 | 5 | 5 | 4 | 30,000 | ||
| Square | Selected Values | 2, 4, 6, 8 | 0 | 0.75, 1.5, 3, 4.5, 6 | 0, 1, 2, 3.5, 5 | 0.5 | 0.5 | 0, 10, 20, 30, 40 | 0, 0.1, 0.2, 0.3 | |
| 1.5 | 1.5 | |||||||||
| 2.0 | 2.0 | |||||||||
| 2.5 | 2.5 | |||||||||
| Number of scenarios | 4 | 1 | 5 | 5 | 4 | 5 | 4 | 8000 | ||
| Total number of models considered | 38,000 | |||||||||
| Algorithm | |||||
|---|---|---|---|---|---|
| MLP | 0.9955 | 0.0158 | −0.0101 | −0.0189 | −0.0001 |
| GMDH | 0.8417 | 0.0938 | −0.0750 | −0.1123 | −0.0009 |
| ANFIS-PSO | 0.9542 | 0.0505 | −0.0017 | −0.0605 | 0.8997 |
| Algorithm | Error | |
|---|---|---|
| MLP | 3184.23 | 1.96% |
| GMDH | 3325.11 | 2.38% |
| ANFIS-PSO | 3091.24 | 4.82% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sadegh Es-haghi, M.; Abbaspour, M.; Abbasianjahromi, H.; Mariani, S. Machine Learning-Based Prediction of the Seismic Bearing Capacity of a Shallow Strip Footing over a Void in Heterogeneous Soils. Algorithms 2021, 14, 288. https://0-doi-org.brum.beds.ac.uk/10.3390/a14100288
Sadegh Es-haghi M, Abbaspour M, Abbasianjahromi H, Mariani S. Machine Learning-Based Prediction of the Seismic Bearing Capacity of a Shallow Strip Footing over a Void in Heterogeneous Soils. Algorithms. 2021; 14(10):288. https://0-doi-org.brum.beds.ac.uk/10.3390/a14100288
Chicago/Turabian StyleSadegh Es-haghi, Mohammad, Mohsen Abbaspour, Hamidreza Abbasianjahromi, and Stefano Mariani. 2021. "Machine Learning-Based Prediction of the Seismic Bearing Capacity of a Shallow Strip Footing over a Void in Heterogeneous Soils" Algorithms 14, no. 10: 288. https://0-doi-org.brum.beds.ac.uk/10.3390/a14100288